
Abstract
Failures in wind turbine drivetrain system including gearbox, bearings, and generator accounts for more than 60% of total wind turbine downtime. In this study, a mechanics-based digital twin technology is proposed to update drivetrain models parameters using measured data and predict the mechanics-based demand in drivetrain components. With the proposed mechanics-based digital twin, the alternations in the structural model parameters can be monitored and identified for damage diagnosis purposes. The proposed technology is implemented on a numerical torsional model of a wind turbine drivetrain system to update the drivetrain model using simulated data and predict the mechanics-based demand in drivetrain components. Implementation of this approach is used to update the failure models and estimate the remaining useful life of drivetrain components including gears and shafts.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- System identification
- Remaining useful life
- Wind turbine drivetrain
- Digital twin technology
- Bayesian model updating
15.1 Introduction
More than 60% of total wind turbine downtime is caused by failures in wind turbine drivetrain system including gearbox, generator, and bearings [1]. The overall costs for failure in wind turbines are much higher in offshore wind turbines which are farther from the shore making the maintenance more costly and increasing the downtime. Unexpected failures can occur due to the difference in dynamic demands in wind turbine drivetrain systems and the values used in the design. This shows the importance of remote monitoring for damage identification and condition monitoring in wind turbine drivetrains.
Different studies have been carried out for model identification and damage detection of wind turbine drivetrain systems. Perisic et al. [2] used an augmented Kalman filter with fading memory to measure the drivetrain shaft torque indirectly using the measurements from the rotor angular velocity, generator torque, and generator angular velocity. Also, the authors compared the robustness of the proposed augmented Kalman filter with fading memory with augmented Kalman filter, by adding noise to the simulated wind turbine data. It was concluded that, the proposed algorithms provide an acceptable matching between the predicted and the simulated shaft torque signals. In another study, Moghaddam et al. [3] proposed an algorithm for near real-time estimation of wind turbine torsional drivetrain parameters. The authors compared their model responses with a high-fidelity model [4], and it was shown that the proposed digital twin approach is computationally fast and can be used for online monitoring of wind turbine drivetrain components.
In the present study, a Bayesian model updating approach is used for mechanics-based model updating approach, which has been previously implemented and validated through numerically simulated data for earthquake engineering applications [5] and for digital modeling of wind turbine tower [6] is modified for the application of wind turbine drivetrain systems in the present study. The proposed model updating approach is implemented on a numerical torsional model of a wind turbine drivetrain system to update the drivetrain model parameters using simulated data and predict the mechanics-based demand in drivetrain components.
15.2 Analysis
The Bayesian model updating approach previously used for earthquake engineering applications [5] and for digital modeling of wind turbine tower [6] is being used for the application of wind turbine drivetrain systems. In a Bayesian model updating approach, the uncertain model parameters of the system (θ) are updated using sensor measurements (y) via the Bayes theorem:
where p(θ| y) represents the posterior probability density function, p(θ) is the prior probability density function which shows the previous knowledge of the parameter, p(y| θ) is the likelihood function, and p(y) is the evidence.
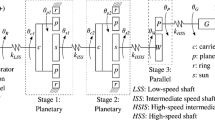
The proposed technology is implemented on a numerical torsional model of a wind turbine drivetrain system to update the drivetrain model using simulated data and predict the mechanics-based demand in drivetrain components. In this regard, the NREL 5MW reference wind turbine drivetrain is selected as the case study, whereas only the torsional behavior of the drivetrain is considered. A schematic model of the wind turbine drivetrain with two planetary gearbox stages and one parallel gearbox stage is illustrated in Fig. 15.1. In this figure, R, C, S, W, and G represents the rotor, carrier, sun gear, wheel gear, and the generator, respectively. Also, LSS, IS, and HSS denote the low-speed shaft, intermediate shaft, and high-speed shaft, respectively. The overall gearbox ratio is 1:97 [7], whereas the gearbox ratio for the first stage planetary gearbox is 1:3.947, the second stage planetary gearbox ratio is 1:6.167, and the third stage parallel gearbox ratio is 1:3.958 [4].

Schematic model of the wind turbine drivetrain with two planetary gearbox stages and one parallel gearbox stage
The rotor, generator, and gearbox components including planet carrier, gears, and the shafts are modeled as a one torsional degree of freedom. The wind turbine drivetrain is modeled numerically, and the equations of motion can be written in a matrix format as follows:
where J is the mass inertia matrix, K is the stiffness matrix, and T is the external torques applied to the drivetrain system. \( \ddot{\theta} \) and θ are the nodal acceleration and displacement vectors.
Using the Bayesian model updating approach, the aerodynamic input torque can be estimated jointly with the LSS stiffness and rotor mass moment of inertia only based on generator torque and speed measurements. As it can be seen from Fig. 15.2 (a)–(b), the LSS stiffness and rotor polar mass moment of inertia converge to the true values and can be estimated after a few iterations. Also, the time-history of measured generator speed and estimated aerodynamic torque can be seen in Fig. 15.2 (c)–(d). It can be observed that the measured generator speed matches the predicted generator speed.

Convergence history of normalized (a) rotor mass moment of inertia and (b) LSS stiffness; (c) time-history of measured and estimated aerodynamic torque; (d) Measured and predicted responses of generator from the updated model
15.3 Conclusion
A mechanics-based digital twin technology is used to update wind turbine drivetrain model using measured data and predict the mechanics-based demand in drivetrain components. The changes in structural model parameters can be identified and monitored for damage diagnosis purposes of the wind turbine drivetrain system. In this regard, a numerical torsional model of the wind turbine drivetrain system, including the rotor, gearboxes, generator, and corresponding shafts, is established to update the drivetrain model using simulated data and predict the mechanics-based demand in drivetrain components. Implementation of this approach is used to update the failure models and estimate the remaining useful life of drivetrain components including gears and shafts. It has been shown that, using the developed Bayesian model updating approach the aerodynamic input torque can be estimated jointly with LSS stiffness and rotor mass moment of inertia using only measurements from the generator.
References
Pfaffel, S., Faulstich, S., Rohrig, K.: Performance and reliability of wind turbines: a review. Energies. 10(11), 1904 (2017)
Perišić, N., Kirkegaard, P.H., Pedersen, B.J.: Cost-effective shaft torque observer for condition monitoring of wind turbines. Wind Energy. 18(1), 1–19 (2015)
Moghadam, F.K., Rebouças, G.F.d.S., Nejad, A.R.: Digital twin modeling for predictive maintenance of gearboxes in floating offshore wind turbine drivetrains. Forschung im Ingenieurwesen. 85(2), 273–286 (2021)
Nejad, A.R., Guo, Y., Gao, Z., Moan, T.: Development of a 5 MW reference gearbox for offshore wind turbines. Wind Energy. 19(6), 1089–1106 (2016)
Ebrahimian, H., Astroza, R., Conte, J.P., Papadimitriou, C.: Bayesian optimal estimation for output-only nonlinear system and damage identification of civil structures. Struct. Control Health Monit. 25(4), e2128 (2018)
Nabiyan, M.-S., Khoshnoudian, F., Moaveni, B., Ebrahimian, H.: Mechanics-based model updating for identification and virtual sensing of an offshore wind turbine using sparse measurements. Struct. Control Health Monit. 28, e2647 (2021)
Jonkman, J., Butterfield, S., Musial, W., Scott, G.: Definition of a 5-MW reference wind turbine for offshore system development No. NREL/TP-500-38060. National Renewable Energy Lab. (NREL), Golden (2009)
Jonkman, J.M., Buhl Jr, M.L.: FAST user’s guide, vol. 365, p. 366.8. National Renewable Energy Laboratory, Golden (2005)
Acknowledgments
This work was supported by National Offshore Wind Research and Development Consortium (NOWRDC). The authors are grateful for all the support.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Society for Experimental Mechanics, Inc.
About this paper

Cite this paper
Jahangiri, V., Valikhani, M., Ebrahimian, H., Liberatore, S., Moaveni, B., Hines, E. (2023). Digital Twinning of Modeling for Offshore Wind Turbine Drivetrain Monitoring: A Numerical Study. In: Mao, Z. (eds) Model Validation and Uncertainty Quantification, Volume 3. Conference Proceedings of the Society for Experimental Mechanics Series. Springer, Cham. https://doi.org/10.1007/978-3-031-04090-0_15
Download citation
DOI: https://doi.org/10.1007/978-3-031-04090-0_15
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-04089-4
Online ISBN: 978-3-031-04090-0
eBook Packages: EngineeringEngineering (R0)