
Abstract
In the 11th century AD the Andalusian engineer Ibn Khalaf al-Muradi wrote a mechanical manuscript with the original title Kitāb al-asrār fī natā’iy al-afkār and called ‘The Book of Secrets’, which is preserved because a copy of it was made in Toledo in 1266 AD and is kept in the Biblioteca Medicea Laurenziana in Florence. This manuscript is of great importance in the field of science and engineering because it represents one of the earliest accounts of complex mechanisms in antiquity. The manuscript consists of 31 chapters written in Arabic, on different topics such as time-measuring machines with automata, war machines, water pumps and sundials. The present work is a historical-technological study of 2nd and 21th mechanisms. These are a theatre which works by means of a gear system and a war machine which works by means of a Nuremberg scissors mechanism. Some of these mechanisms are used in modern machines such as elevators and transmission systems. First of all, a description of the components of the mechanisms and how they work will be given. Next, a virtual reconstruction of the mechanisms will be made, using geometric modelling software such as SolidWorks, which also allows us to carry out a mechanical analysis. From this three-dimensional model, a virtual animation will be generated where the movement and operation of the mechanism can be appreciated. Finally, a scale reconstruction can be carried out by means of additive manufacturing.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
It can be argued that the birth of the advanced technology dates back to ancient history, and we can found testimonials about inventions in ancient Asia, Middle East and ancient Greece and Rome. But Alexandria, between the 4th century B.C. and 4th century A.C., was the center of most of the ancient innovations of its time with resident likes Ctesilius, Hero and Philo of Byzantium with inventions and mechanical treatises.
At the subsequent Arabic culture, earlier scientific and technological production had been absorbed and developed. In fact, this progress was evidenced in Eastern Islam in treatises such as “The book of ingenious devices” written by the brothers Banü Müsa in 850 in the House of Wisdom in Bagdad which circulated widely in the Muslim world, or the posterior “The book of knowledge of ingenious mechanical devices” written by Al-Jazari in 1206.
The flowering of science and technology in Western Islam came through the influence of Eastern Islam and the support of its rulers, especially in the 9th and 10th centuries from Abd al-Radman II to al-Hakam II, which then spread to Europe, North Africa and America.
In the 11th century the engineer Ibn Khalaf al-Muradi wrote the only known manuscript on mechanics originally called Kitāb al-asrār fī natā'iy al-afkār and called “The Book of Secrets”, which is preserved thanks to a copy of it made in Toledo in 1266 by a translator at the court of Alfonso X the Wise. This copy is preserved in the Biblioteca Medicea Laurenziana in Florence.
The recovery of the manuscript was made possible through the patronage of His Highness the Emir Sheikh Hamad bin Khalifa Al Thani, who funded a research project that has led to its publication in Arabic and English. This manuscript is of great importance in the field of science and engineering because it represents one of the earliest testimonies of complex mechanisms in antiquity.
The manuscript consists of 31 chapters full of secrets written in Arabic, each of which describes different mechanisms; although this manuscript is not completely preserved as many of its pages have been damaged. A description of each of the mechanisms is given in Arabic and is accompanied by sketches and drawings of the mechanisms (Fig. 1).

Example of one of the pages of the manuscript
In this chapter, figures 2nd and 21th of the manuscript will be analyzed and studied. Then, these descriptions of the mechanisms will be interpreted in order to understand how they work. The next step, using the software used, will be to carry out the geometric modelling, virtual reconstruction, mechanical analysis of the mechanism and possible real scale reconstruction. Finally, some current applications of these mechanisms will be discussed.
2 The 2nd Figure
Figure 2nd is a theatre in which two knights, two foot soldiers and two maidens perform a scene in which they all move around the theatre, driven by a system of gears that are moved by a rotating paddle mill driven by a stream of water.
Transcription of the description:
“We want to make a shape, which has two knights, two foot soldiers and two maidens. So let be a rectangle ABCD, in which line AD is four times longer than the line AC. On the line AC, there will be a knight, a foot soldier and a maiden. So will be the same on line BD.
In the middle of the shape and between lines AC and BD, install a six-finger-wide and three-(handbreadth)-long board. The knights run from one side to the other on this board.
The horses (of the knights) should each be installed on a circle. The two circles are separated by one handbreadth. In the center of each circle, a bar is installed. The bar extends to the head of the knight and penetrates the board below the circles. The two bars end below the board. Install a gear at the end of […]. In the middle of the gear, install a column so that the gear turns by the turn of the column. The column ends in a board, whose width is equal to the diameter of one circle and the space between the two circles. This board lies on four orbits like wheels, which run on another board extending from the beginning of the figure to its end. The board, (on which the wheels run), has two grooves separated by a distance equal to that separating the wheels. The board, which has the wheels, also has two trays, on which the two bars turn. […].
The columns end at the upper half of the knights if God so desires. [...] As for the [mechanism] that moves all that we have mentioned, it will be explainer as follows if God so desires.
Make an orbit IJ. If the water is scarce, make it of the kind that moves querns. Install the [orbit] on an axis KL. The axis KL is installed between the lines AD and MN. Point L is on line CB, while the axis does not touch line AD. The point K is on the line [MN] outside the figure to the side of AD. Install another orbit, BD, on axis KL. Orbit BD contains 64 teeth on one half of its circumference. Install two axes, EF and OH, parallel to axis KL. Install their ends on the lines CB and AD. Each axis holds an orbit IJ, which has teeth along its circumference and is equal in their dimensions to those of orbit BD. The diameter of orbits IJ is one fourth that of orbit BD.
Install a cross on each of the axes EF and GH. At the end of one of the crosses and at the point G, extend a rope from the cross to a pulley, R, at line AC. The rope extends from this pulley to a pulley P and ends in a cross installed on the column holding the knight. The same is to be done with the other knight. Extend another rope from cross E, in the same manner, and tie it to the front of the other side [of the cross] of each knight. Extend another rope along the cross [G] to pulley Q, which is at line AC. The rope extends from this pulley to a pulley, H, and then to the column on which the foot soldier is installed. The rope should be protected from the breeze while passing between the two pulleys H and Q by passing in a tube. Do the same to the other foot soldier. Extend a rope from cross F to a pulley, Q, at line BD. The rope then passes to a pulley […] and ends at the bottom of the column on which the foot soldier is installed. The rope should pass in a tube between cross F, pulley Q and pulley […] to be protected from being moved by the breeze.
Install an axis away from the orbit [BD] and install a bar on it. The bar has teeth at, one end and a weight at the other. The teeth are equal in dimensions to those of j the orbit BD. The end that is attached to a weight is also attached to a rope. The rope extends to the body of the maiden and splits into two halves, each of which passes to one of her elbows. The other maiden is moved in the same way. And that is what we wanted to do if God so desires. And this is its image.”

Illustration and description of the 2nd figure
The figure composing a scene with two knights, two soldiers and two princesses is characterized by complicated movements, each playing a role: the knights gather for battle in the centre of the scene, while two hidden foot soldiers come out to join the battle. When they see the fight, the maidens raise their arms in the air. The mechanism used to animate the characters in this scene is similar to other mechanisms used in other figures in the manuscript.
In this figure 2nd, the main mechanism is the gear system, which is made up of three transmission shafts, on one of which is the windmill that moves the whole mechanism thanks to a current of water. On this same shaft there is a toothed wheel with straight teeth but only with teeth on half of the wheel and on the other two shafts there are two toothed wheels with teeth of the same size as the previous toothed wheel and with the same number of teeth and they have a cross for tying ropes. These ropes are then passed through rollers and tied to the figures in the theatre so that they can move.
3 The 21th Figure
Figure 21th is a war machine that is placed on top of a tower and consists of a battering ram mounted on a scissor mechanism, which is intended to bring down enemy towers and destroy fortresses.
Transcription of the description:
“We want to make a military figure 1 which is installed on top of a tower or in any other place. (The figure] can be extended twenty yards or whatever distance needed outside the tower and can throw fire which destroys whatever it meets. The figure then returns quickly to its place. So let us make a rectangle, ACBD, where line AC is twice as long as line AD. Draw lines IJ and KL between lines AC and BD. Draw two lines, GH and QT, between lines IK and JL. Draw also lines MN and MN from line IJ to line KL. Make sure that all that I describe is done with precision and accuracy. The lines intersect together with no increase or decrease.
Install on the previous figure a fixed cover which does not touch the figure and ‘is similar to [...]. [The cover and the figure] are separated by nine fingers.
As for the figure mentioned before, ð is explained as I describe if God so desires. Make two (rectangles) QTTQ. The length between T and T is twelve […] fingers and between Q and Q is nine fingers. […] so they are four figures. Make a hole at point F of the figures […] at line IK and install a bar (…). This bar connects the first figure and […] the fourth figure. The distance between F and T is equal to that between the figure and the cover.Attach two ropes to the points [T]. [The first] rope extends to a pulley, M, and then is attached to a pulley […]. The second rope extends from point T to a pulley, F, and then is attached to a cylinder O. We do the same with the ropes extending from the other point T.
Make four figures RVVR. The length of each figure between points R is six yards. The length between points V is six fingers. The thickness of the figures is six fingers each. The figures intersect with each other. Make a hole at point T and [install] an iron bar [in the hole] to conned the four figures.
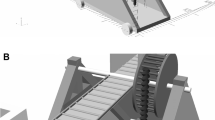
Take four other figures, V, V, X and X made of wood. The length of each figure [V] is four yards, the width at points V is six fingers, and the thickness of each one is four fingers. The width at points X is four fingers and the thickness is three fingers. The figures intersect with each other and are connected with bars so that they move around these bars easily (Fig. 3).

Illustration and description of the 21th figure
Make two bars at point H. [Install] the two pulleys, D and D, on top of these bars. Then we make a bird’s head, which is hollow and is three-yards long. The head is installed on an axis at point H and its movement is smooth. The extension of the head should not exceed the figure. Extend two ropes from points X and X to pulleys […] then pass them to points C and C.[…] And so if we want to move it, we should turn the two cylinders together and the figure would go up. And if we want to bring it back, we turn the cylinders in the opposite direction and the figure will go back. And that is what we wanted to do if God so desires and this is its image.
The basic mechanism shown in Figure 21th is now known as the “Nuremberg scissors”. It is a mechanism made up of a set of bars joined to each other at their ends and in the intermediate part of these, which allows to move from a lateral rhombus to a longitudinal rhombus, which provides a large displacement from a small space when the mechanism is retracted.
4 Geometric Modeling
SolidWorks, a CAD (computer-aided design) software for mechanical modelling in 2D and 3D, has been used for the geometrical modelling of the mechanism. The software allows parts and assemblies to be modelled and to extract from them both technical drawings and other information necessary for manufacturing. The process consists of transferring the designer’s mental idea to the CAD system, “virtually constructing” the part or assembly. Subsequently, all the extractions (drawings and exchange files) are carried out in a fairly automated way.
From the modelling of simpler parts, they can be assembled into more complex assemblies using positional relationships and finally these assemblies with the Finite Element Analysis simulation complements can be meshed, forces applied and analyse them numerically, from the mechanical point of view.
The dimensions of the parts have been obtained from de few indicated in the descriptions of the mechanisms. For the rest of the elements, they have been deduced proportionally.
4.1 Figure 2nd
The modelling of the figure was based on the description and interpretation of the figure, according to the previous sections.
The main upper plate is where the movements of all the characters are made and to make it a sketch has been made with the slots for the different characters and this sketch has been extruded, then there is another small plate so that the ropes that make the system move are protected. The column that serves as a support for the characters consists of an extrusion of several circles (Fig. 4).

Main upper plate and column of the 2nd figure
The arms of the maidens move by means of a rack and pinion mechanism that transform the rotary movement of the cogwheel into a linear one. As the gear only has teeth in the middle, a weight attached to a rope is used to return it to its position. The cross and the ropes attached to it are used to move the knights and soldiers. The mechanism has seven shafts, some of which are keyed, to transmit the movement (Fig. 5).

Rack and cross of the 2nd figure
The main gear wheel has straight teeth, but with teeth only on half of its circumference, which engages with the two secondary gear wheels, causing half of the theatre to move and then the other half. So that while one wheel is moving, the other can return to its original position by means of a weight, so that the theatre operates continuously with the water.
To make the whole thing move, it has a wheel similar to a waterwheel with paddles that would be moved by a current of water. If there is a shortage of water, a crank can be made to move the mechanism. This piece is similar to that of a water mill. To make the piece, the two rings have been made and extruded and then one of the blades has been made and the rest has been made with a circular die.
The mechanism has several drum rollers for winding and redirecting the strings used to move the figures. In this way, the geometric modelling of the different pieces that make up the mechanism has been carried out (Fig. 6).

Waterwheel and cross of the 2nd figure
Next, the assembly of all the elements that make up the mechanism is carried out, by means of the position relationships between them, such as: concentric for the axles, gears, rollers; groove to place soldiers and knights; coincident to make the faces stick to each other; pinion-rack to make the gear; gears to make a position relationship between them; belt/pulley so that two separate wheels have movement (Fig. 7).

Complete assembly of the mechanism of the 2nd figure
Once all the parts that make up the assembly are related, the simulation of the movement that the mechanism would have can be carried out, placing rotating, linear and trajectory motors, as well as the effect of gravity, forces on the parts, springs and contacts between parts.
4.2 Figure 21th
Following the criteria set out for Fig. 2, the geometric modelling of this figure 21 has been carried out on the basis of its description.
The dimensions of the base depend on the tower or the location where the mechanism is to be placed. This part must be very robust to be able to withstand the forces that the mechanism makes on impact (Fig. 8).

Base and bar of the 21th figure
There are a total of eight bars that make up the mechanism of the scissors, of different sizes and shapes that are made by extrusion and drilling. In order for the whole assembly to move, a kind of rudder is made which is operated by human strength. It also has rollers for winding and redirecting the ropes that serve to transmit the forces that make the mechanism work (Fig. 9).

Rudder and roller of the 21th figure
In this way, the geometric modelling of the different pieces that make up the mechanism has been carried out. The assembly of all the elements that make up the mechanism is then carried out, by means of the position relations between them, such as: concentric for the axles, gears, rollers; coincident to make the faces glued to each other; parallel or distance to make the faces not glued but parallel; belt/pulley to make two separate wheels have movement.
Once all the parts that make up the assembly have been connected, it is possible to simulate the movement that the mechanism would have by placing a rotating motor on the rudder, which would be the actuator, allowing an analysis of the movement to be carried out (Fig. 10).

Complete assembly of the mechanism of the 21th figure
5 Technological Analysis
The SolidWorks software has modules that allow an analysis of the movement as well as evaluating the mechanical performance, and using the position relationships of the assembly, contacts in the mechanism, forces, springs, action of gravity and motors, you can determine the movement of the assembly. Because of this, the mechanism can be analysed both from the kinematic point of view and from the dynamic point of view, and videos and animations can also be made of what the movement of the mechanism would be like.
To carry out the simulations, the geometric modelling of the 3D parts, the assembly of the set, the application of the materials, the boundary conditions, the meshing of the parts and finally the simulation were carried out.
The simplification that there is no friction between the parts and that the materials are isotropic has been made. In addition, the boundary conditions have been applied, for pins so that they remain straight, for faces to allow the displacement of the elements as a rigid solid, for contacts between parts to allow compatible deformation between the contact surfaces, and finally the support constraints.
5.1 Static Analysis
To carry out the simulation of the static loads, a mesh with different levels has been used, finer mesh in the areas with applied forces or discontinuities in the material and progressively coarser mesh as we move away from these points.
The FFEPlus solver has been chosen with large deformations as the dimensions of the parts are in the order of metres. The stopping setpoint is 1 × 10–8 in order to achieve a good solution and simulation result using the finite element method (Fig. 11).

Result of stresses and displacements
As the elements are joined by pins, there is no resistance to rotation at the joints of the structure and therefore no moment is produced in the sections, only axial, so it is a bar structure. It has a very slender structure, so when it is subjected to axial compressive forces, buckling occurs. The displacements that occur are large.
5.2 Fatigue Analysis
Starting from the same meshing conditions and boundary conditions of the previous section, the model is subjected to cyclic forces. Materials are assigned to obtain the S-N stress-life cycle curve, which determines their behaviour. In this case, steel and mahogany wood have been used (Fig. 12).

Result of stresses-live
It can be seen how, as the stresses increase, the life of the materials is reduced. In the areas close to the stress concentrators, the stresses produced are multiplied, which reduces the life of the structure.
5.3 Kinematic Analysis
To carry out the kinematic analysis, another of the modules of the SolidWorks software used is used, in which the rotary and linear motors are placed to give movement to the elements. A rotary motor has been placed on the rudders with which the whole mechanism is controlled, at an estimated constant speed of 10 rpm, although it is of course modifiable, even variable.
The head of the phoenix has been tracked along the x-axis, which is where its movement takes place, in order to obtain the instantaneous velocity and acceleration curves. Subsequently, these results will be used for the impact analysis.
When the mechanism starts to move, its velocity increases, so the acceleration reaches high values. Then when the velocity reaches its maximum and starts to decrease in an almost straight line shape, the acceleration remains constant and almost parallel to the time axis (Fig. 13).

Relationships between position, velocities and accelerations
5.4 Impact Analysis
Starting from the same meshing and boundary conditions as above, it is now subjected to impact loading, which can be obtained from the velocity and acceleration, which can be obtained from the motion analysis in the previous section (Fig. 14).

Stresses and displacements on impact
It can be seen that as the acceleration increases the stress results increase, since the impact force depends on the mass and acceleration.
6 Real Scale Reconstruction
From the geometrical modelling carried out, the real reconstruction of these mechanisms can be made. In this case, it has been done from figure 21.
An FDM (Fused Deposited Modeling) printer has been used, specifically the BQ Witbox. In this printer, a spool of thermoplastic filament (ABS or PLA, as in our case), which is supplied continuously to a nozzle, is heated and extruded in the form of hot, viscous filament. A computer controls the movement of the nozzle along the x and y axes, creating successive layers on the z axis by melting the plastic filament, which solidifies as it cools. In the latest models, a second nozzle carries the support material which can be easily removed later, allowing the construction of more complex parts.
The software used was Cura, which analyses the mesh of the geometric model made, corrects gaps or orientations, to optimise the use of material and printing time, and allows us to obtain the layers of the model and its G code.
For this purpose, the following steps have been carried out: geometric modelling; discretisation by saving the parts in STL stereophotography format; obtaining layers with the help of the Cura program which opens the STL file and obtains the ISO code or G code. Finally, the parameters of the extrusion speed, temperature, type of material, number of layers, path to be used and support material are defined.
With the G-code entered in the printer, printing can be carried out, from which the support material must be removed and, if necessary, post-processing and finishing operations, such as sanding, smoothing or painting the part, can be carried out (Fig. 15).

Mechanism 21th reconstructed to scale
7 Conclusions
Through geometric modelling and computer simulation, virtual reality can be achieved as they allow the reconstruction of mechanisms, machines, structures, etc., and thus see how they will be or how they were, so that as in this work, we can reconstruct and analyse mechanisms designed by the knowledge of “engineers” ahead of their time.
The study of a theatre mechanism as in Fig. 2 and of a scissors mechanism as in figure 21, from the manuscript “The Book of Secrets”, written in the 11th century by Ibn Khalaf Al-Muradi, has been carried out, which has been facilitated by the use of mechanical design and analysis software. The work required geometric modelling and analysis of the different elements of the ensemble. For the subsequent animation, it was necessary to study the movement and transmission relationships of and between each of the elements that make up the mechanism.
From the mechanical analysis it can be deduced how the sizing was carried out fundamentally by means of the trial and error process, which could allow us to redesign and optimise the mechanism.
In this type of study, knowledge of different engineering subjects must be applied, such as design, mechanics and manufacturing, and the use of CAD-CAE-CAM software, as it is not only of historical interest but also of technological interest, as we have been able to see.
This methodology gives rise to its use and application to other mechanisms that allow us to learn about and delve deeper into the History of Mechanical Engineering and Machines and Mechanisms.
References
Bautista Paz, E., Ceccarelli, M., Echavarri Otero, J., Muñoz Sanz, J.L.: A Brief Illustrated History of Machines and Mechanisms. Springer, Madrid (2010). https://doi.org/10.1007/978-90-481-2512-8
Beakley, G.C., Leach, H.W.: Engineering: An Introduction to a Creative Profession, 4th edn. Macmillan Publishing Company, New York (1970)
De Camp, L.S.: The Ancient Engineers. Doubleday and Company Inc., Garden City (1963)
Finch, J.K.: The Story of Engineering. Anchor Books, Doubleday and Company Inc., Garden City (2017)
Gregory, M.S.: History and Development of Engineering. Longman Group Limited, London (1971)
Hathaway, G.A.: Dams-their effect on some ancient civilizations, in Civil Engineering. American Society of Civil Engineers, New York (1958)
Al-Murādī, I.K.: The Book of Secrets. Leonardo 3, Milan (2008)
Montes, J.C., López-García, R., Dorado-Vicente, R., Trujillo, F.J.: Mock-up of an eighteenth-century oil mill via rapid-prototyping. In: López-Cajún, C., Ceccarelli, M. (eds.) Explorations in the History of Machines and Mechanisms. HMMS, vol. 32, pp. 65–75. Springer, Cham (2016). https://doi.org/10.1007/978-3-319-31184-5_7
Upton, N.: An Illustrated History of Civil Engineering. William Heinemann Ltd., London (1975)
Sierra, C.E.: Mecánica andalusí: otra faz de nuestra historia. Rev. Univ. de Antioq. 306 (2011)
Petrova, V.R.: Introduction to Static Analysis Using SolidWorks Simulation. CRC Press, Boca Raton (2014)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
López-García, R., Fernández-Liétor, I., Dorado-Vicente, R., Medina-Sánchez, G. (2022). Analysis of Mechanisms 2 and 21, Included in Ibn Khalaf Al-Muradi’s “The Book of Secrets”. In: Ceccarelli, M., López-García, R. (eds) Explorations in the History and Heritage of Machines and Mechanisms. HMM 2022. History of Mechanism and Machine Science, vol 40. Springer, Cham. https://doi.org/10.1007/978-3-030-98499-1_10
Download citation
DOI: https://doi.org/10.1007/978-3-030-98499-1_10
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-98498-4
Online ISBN: 978-3-030-98499-1
eBook Packages: EngineeringEngineering (R0)