
Abstract
Damage susceptibility of a building having non uniform distribution of mass together with stiffness is likely to be more, should either be avoided or may be dealt with using control device. The device could be active, passive or their hybrid. In this paper, the two vertical irregularities have been considered and requirement for number and placement of active tendons are investigated. For this purpose, a ten story seismically designed regular frame is taken as a reference frame. Dual irregularities due to mass and stiffness in critical storys are introduced with the modification factors 2 and 3 in mass irregularity, and 0.50 and 0.20 in stiffness irregularity respectively. The control forces required to reduce the responses of the irregular frames obtained through linear quadratic regulator are applied to the tendons placed at their optimal locations. The optimization is used to minimize the base shear and number of tendons constraining the peak story drift and maximum floor displacement within permissible limits prescribed by earthquake code. Two far fields and two near field seismic events are considered for nonlinear analyses of the frames. Results obtained are compared and discussed. Strategy developed to reduce the responses of the frames subjected to the earthquakes is found effective for the frames with critical dual irregularities under considered earthquakes.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Active tendon system
- Mass irregularity
- Stiffness irregularity
- Linear quadratic regulator
- Genetic algorithm
1 Introduction
In a seismic event buildings with non-uniform distribution of mass, stiffness, and strength are susceptible to more damage as compared to a regular one (Sayyed et al. 2017). Clause 7.1 of IS 1893 (Part 1):2016 specifies about stiffness and mass irregularities. These aspects have been studied by many researchers. Al-Ali and Krawinkler (1998) introduced mass irregularity in a shear building frame using mass modification factors varying from 0.25 to 4 to assess its effect on inelastic response parameters like story drift, ductility demand, or energy dissipation. They observed that small variation in mass has less effect on these parameters. Valmundson and Nau (1997) changed mass of one of the floors of five, ten, and twenty story shear buildings keeping the other floor masses constant and found up to 20% increase in ductility demand for mass ratio 1.5. Irregularity in lower floors was found to be critical. Michalis et al. (2006) studied effect of mass irregularity on reference regular frame through incremental dynamic analysis keeping mass of some floors of a building twice the mass of the corresponding floors. They found that the mass irregularity had pronounced effect on story drift. Vinod et al. (2009) after studying irregularity of structures observed that both the floor displacements and story drifts of a structure depend upon the extent and location of the irregularity. The effect is more when the mass of the lower and upper storys increases as compared to increase in mass of middle story. Tremblay and Poncet (2005) studied effect of mass irregularity on the performance of buildings with setbacks. They considered two mass ratios and three locations of mass irregularity. These irregular structures showed lower performance than the regular reference frame. Daniel and Lavan (2013) studied seismic control of irregular structures using multi tuned mass damper. They optimized the location and size of these dampers by minimizing mass of the damper (objective function) and constraining floor accelerations. The method proved effective in mitigation of response of the structures with any type of irregularity. Nazarimofrad and Mehdi (2016) used an active tendon system to control the response of an irregular multi-story building subjected to seismic load. Soil structure interaction effect was also considered and control forces were generated through linear quadratic regulator control algorithm. The results indicated that the method is less efficient in reducing the responses of the buildings located in soft soils.
Sophocleous (2006) employed visco-elastic dampers to control response of regular and irregular buildings. He observed significant reduction in floor accelerations and story drift in these buildings. Moehle (1984) worked on reinforced concrete structures with stiffness iregularity in 1st story and found experimentally that the performance of a structure depends upon both the location and extent of irregularity. Al-Ali and Krawinkler (1998) investigated the individual and combined effect of irregularities with mass, stiffness, and strength on response of a structure due to earthquake and concluded that the strength irregularity both individually and and in combination with stiffness irregularity affected the roof displacement. Chintanpakdee and Chopra (2004) researched the combined strength and stiffness irregularities and their effect on the performance of frames modelled on the basis of weak-beam strong column theory. They found that the strength and stiffness irregularities in combination had significant effect on the response than their individual effects. Chi-Chang et al. (1999) studied seismic control of multistory torsionally coupled shear building using passive tuned mass dampers (PTMD). It was found that a single PTMD led to significant reduction of both the translations and the rotations of the building. Lavan and Daniel (2013) used multi-tuned mass damper for response control of 3D irregular structures using performance based control strategy. It was effective in all type of irregularities.
Many researchers have employed different optimization methods to optimize the location and number of active control devices to both regular and irregular structures. Nazarimofrad et al. (2018) obtained optimum number and location of actuators in 3D irregular buildings with plan irregularity using multiobjective genetic algorithm. The number of tendons were reduced by 50%. Rao and Sivasubramanian (Rao and Sivasubramanian 2008) used multiple start guided neighbourhood search algorithm for the same purpose. Rao et al. (1991) used genetic algorithm to study optimal actuator location in tall buildings. Liu et al. (2003) used a discrete nonlinear optimization method and genetic algorithm for the optimization of the actuators. Askari et al. (2017) simultaneously used multi objective genetic algorithm and magneto rheological damper in active and semi active control respectively. Rather and Alam (2020, 2021) used multi-objective genetic algorithm to control seismic response of a frame with stiffness irregularity, and mass irregularity. The study revealed that the optimized control system was sucessful in keeping the responses of the building frame to an earthquake within permissible limits.
In this study, the relative performance of a regular and an irregular shear building frame with dual irregularities, mass and stiffness in different storys is compared and then an active tendon control system through linear quadratic algorithm is used to reduce their seismic response. Active tendon system is a combination of tendons and actuators (Fig. 1). Dual irregularities due to mass and stiffness in critical storys are introduced with the modification factors 2 and 3 in mass irregularity, and 0.50 and 0.20 in stiffness irregularity respectively. The control forces required to reduce the responses of the irregular frames obtained through linear quadratic regulator are applied to the tendons placed at their optimal locations. The optimization is used to minimize the base shear and number of tendons constraining the peak story drift and maximum floor displacement within permissible limits prescribed by earthquake code.

Active tendon system.
2 Problem Formulation and Control Methodology
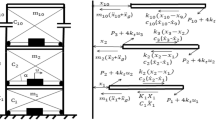
Figure 2 shows a model and free body diagram of a ten story seismically designed shear building frame under consideration installed with an active tendon system which is an assembly of tendons and actuator. The mass, stiffness, damping, and height of ith story are denoted by \({m}_{i}\), \({k}_{i},{c}_{i}\) and h respectively. The stiffness and inclination of tendon are given by \({k}_{c}\) and α respectively. Assuming the presence of tendon in each story, the equation of motion of the frame subjected to earthquake loading is expressed as:
In Eq. (1), M, C, and K denote the mass, damping, and stiffness matrices of the frame model. Floor displacements and control forces in the tendons are denoted by X(t) and U(t) respectively. coefficient vector for ground acceleration is \(\delta\) while \(\gamma\) shows tendon location. In state space, Eq. (1) is written as:
where, \(A=\left[\begin{array}{cc}0& 1\\ \left[\frac{-K}{M}\right]& \left[\frac{-C}{M}\right]\end{array}\right],{B}_{r}=\left\{\begin{array}{c}\left\{0\right\}\\ \left\{\frac{\delta }{M}\right\}\end{array}\right\}, {B}_{u}=\left\{\begin{array}{c}\left\{0\right\}\\ \left\{\frac{\gamma }{M}\right\}\end{array}\right\}\).
In this study, Linear Quadratic Regulator is used as an active control algorithm to generate control forces using the response of the frame as an input. In LQR, the control force given by Eq. (4) is found by minimizing the total energy associated with the system as given in Eq. (3) and constraining Eq. (2). In Eq. (3), Q is a 2n × 2n positive semi-definite matrix, and R is an n × r positive definite matrix, where n and r denotes degrees of freedom and number of actuators used respectively.

Ten story shear frame and its free body diagram.
where, P is obtained from Eq. (5):
3 Dual Irregularities
Dual irregularities are inroduced in the model shown in Fig. 2 using mass modification factors 3 and 5 in 1st three storys and stiffness modification factors 0.2 and 0.5 in 1st story, and 10th story. These criticals storys are obtained by maximizing each response of the frame with irregularity in mass and stiffness individually. Using these modifcation factors a total of 24 cases of dual irregularities shown in Table 1 have been analysed. In K(0.2,1)M(2,1), K represents stiffness irregularity, 0.2 is MF, 1 means 1st story and M is mass irregularity, 2 is MF of mass irregularity, and 1 indicates 1st floor.
4 Multi-objective Optimization
Multi-objective Optimization is a method to minimize or maximize multiple conflicting objective functions simultaneously. Here, a set of optimal solutions are obtained. In this reasearch the optimization has been done through Genetic Algorithm. The objectives minimized are the ratio of controlled to uncontrolled base shear and quantitiy of tendons used in an earthquake keeping peak story drift and maximum floor displacement constrained.
5 Results and Discussion
Active control of a seismically designed ten story shear building frame with structural parameters shown in Table 2 and having dual irregularities, mass and stiffness is studied in this reseach. These irregularities are introduced as discussed in Sect. 3. Firstly the effect of the dual irregularities on the response of the frame is investigated with reference to regular frame and then an optimal control system comprising of active tendon system is used to control its response to different types of earthquakes. The time histories of the two nearfield (Kobe and Northridge) and two farfield (El centro and Landers) earthquakes used are shown in Fig. 3.
Story drifts, floor displacements, and base shear of the frame under all cases of irregularities are the response quantities of interest. The comparsion of the floor displacements, story drifts of the regular reference frame subjected to the four earthquakes are presented in Fig. 4. In the figure EL, KO, NO, and LA are the response for El centro, Kobe, Northridge, and Landers respectively. P stands for permissible response recommended in IS 1893 (Part 1):2016. Barring Kobe earthquake the floor displacements and story drifts of the regular frame subjected to other three earthquakes are found almost within permissible limits as suggested by the figure. Presence of dual irregularities, mass and stiffness in the frame causes increase in peak values of both the responses beyond the permissible values even for the earthquakes other than Kobe earthquake. The results are presented in Table 3. Entries in the table are the ratios of the peak values of story drift, floor displacement, and base shear of different cases of irregularities to the corresponding value of the response of the reference regular frame. In most of the cases of irregularities, the response ratio is more than one. This means that irregularities in mass and stiffness make the frame defecient in terms of response to earthquakes. Out of all these cases, two cases with high response ratio ranging from 1.22 to 5.23 have been identified. These cases are K(0.2,1), M(3,1), K(0.5,1) and M(3,3). The comparison of the responses of the frames for these two critical cases is shown separately in Figs. 5 and 6. As indicated by Fig. 5, the maximum values of both story drift and floor displacements have exceeded permissible values in subjected to El Centro, Northridge, and Kobe earthquakes. The frames with these combinations of stiffness and mass irregularity have their response within permissible limits in case of Landers earthquake. The figure indicates a maximum increment of 38% in maximum floor displacement of the frame (K (0.5, 1) M (3, 3)) subjected to El Centro earthquake as compared to corresponding response in reference frame. The increase in the response under Northridge earthquake is 65%. The peak floor displacement of the frame with dual irregularity K (0.2, 1) M (3, 1) subjected to Kobe earthquake undergoes maximum increments of 41.29% and 276.6% with respect to the reference regular frame and permissible value respectively. The maximum increase in story drift in the frame with dual irregularity K(0.2, 1) M(3, 1) is 260%, and 200% as compared to regular reference frame subjected to El Centro earthquake and permissible limit of the drift respectively.

Ground motions used in the study.

Comparison of responses of the regular frame subjected to different ground motions.
The corresponding increments for Kobe and Northridge earthquakes are 424%, 991% and 265.14%, 285.8% respectively. Figure 6 shows the comparison of base shear response between regular and irregular frames for the earthquakes considered. Base shear has maximum increment of 22% (El Centro), 5% (Kobe), and 39% in case of Northridge earthquakes. However, it has negligibly decreased in case of Landers earthquake.
Tendons along with actuators have been used to control the response of the frame with dual irregularities and subjected to earthquake loading. The optimization has been performed for only one critical frame K(0.5,1)M(3,3) with dual irregularities. The Pareto curves obtained after optimization are presented in Fig. 7 for the four earthquakes. The figure indicates that it is not possible to reduce the base shear of the frame having dual irregularities, mass and stiffness and subjected to seismic loading by more than 60% while keeping its peak floor displacement and story drift within respective permissible values even by placing tendon in each of its story. In case of Kobe earthquake (Near field), placing a tendon in 1st story reduces base shear by 30% and use of additional tendon has no significant effect on the response. Also the constraint could not attain their permissible values. In case of El Centro earthquake 40% reduction takes place using a single tendon and adding additional 3 tendons could contribute to only 10% more reduction in base shear. Use of two tendons in the irregular frame subjected to Landers and Northridge earthquakes causes 40%, and 59% reductions in base shear respectively. Further addition of tendon in any story is ineffective to further reduce the base shear. The locations of these desired optimal numbers of tendons are shown in Table 4. Results reveal that placement of the tendons in lower storys of the irregular frame having combined stiffness and mass irregularity is indispensable.

Comparison of uncontrolled responses of the frame for different ground motions.

Comparison of uncontrolled base shear of the frame for different ground motions.

Pareto curves for different ground motions.
The comparison of the controlled responses of the irregular frame with dual irregularities for different earthquakes are presented in Figs. 8. The figures indicate that the Active tendon control system considered in this study is successfully applicable to reduce the base shear of the frame with dual irregularities subjected to El centro (Farfield), Northridge (Nearfield), and Landers (Farfield) by more than 40% keeping the maximum floor displacement and peak story drift within the permissible limits. However the active tendon control system is incapable to control the maximum floor displacement and peak story drift of the frame with critical dual irregularity considered in the present work to their respective permissble values under Kobe earthquake.

Comparison of controlled responses of the irregular frame.
6 Conclusions
In this study, active tendons have been employed to control response of a ten story shear frame considering all the combinations of mass irregularity in 1st and 10th story and stiffness irregularity in 1st, 2nd, and 10th storey subjected to two near field and two far field earthquakes. The dual irregularities have been introduced in the frame using mass modification factors 2, & 3, and stiffness modification factors 0.2, & 0.5. Multi-objective optimization has been used to obtain the optimal number and location of the tendons by minimizing the base shear and constraining the maximum floor displacement and peak story drift of the frame simultaneously. The results are presented below:
-
1.
The frame with dual irregularities i.e. stiffness irregularity in 1st story with modification factor 0.5 in combination with mass irregularity on 3rd floor with modification factor 3K (0.5, 1) M (3, 3) is found to be giving maximum floor displacement termed as critical frame leads to 38%, 65%, and 41.29% increase in maximum floor displacement as compared to that of reference regular frame both subjected to El Centro, Northridge, and Kobe earthquakes respectively. Maximum floor displacement in the critical frame under Landers earthquake does not exceed its permissible displacement.
-
2.
Increase in peak story drift of the critical frame is 260%, 424%, and 265.14% for El Centro, Kobe, and Northridge earthquakes respectively. The corresponding increase in base shear is 22%, 5%, and 39% respectively. Like maximum displacement, increase in peak story drift of the frame under Landers earthquake remains permissible value of the story drift.
-
3.
Active tendon control system successfully reduces the base shear of the critical frame subjected to El centro (Farfield), Northridge (Nearfield), and Landers (Farfield) by more than 40% with the maximum floor displacement and peak story drift within permissible limits. However, the active tendon system fails to control the maximum floor displacement and peak story drift of the critical frame to their respective permissble values under Kobe earthquake.
-
4.
Placement of tendons in lower storys for seismic control of the critical frame having combined stiffness and mass irregularities is indispensable.
-
5.
Failure of the active tendon system to control response under near field Kobe earthquake and similar other cases paves the way for application of hybrid control systems.
References
Al-Ali, A., Krawinkler, H.: Effects of vertical irregularities on seismic behavior of building structures, Report No. 130, Blume Earthquake Engineering Center, Stanford University (1998)
Askari, M., Li, J., Samali, B.: Cost-effective multi-objective optimal positioning of magneto rheological dampers and active actuators in large nonlinear structures. J. Intell. Mater. Syst. Struct. 28(2) (2017). Published online: 06 June 2016. https://doi.org/10.1177/1045389X16649449
Chi-Chang, L., Jin-Min, U., Teng-Ching, H.: Seismic response reduction of irregular buildings using passive tuned mass dampers. Eng. Struct. 22, 513–524 (1999). Published online: May 2000. https://doi.org/10.1016/S0141-0296(98)00054-6
Chintanapakdee, C., Chopra, A.K.: Seismic response of vertically irregular frames, response history and modal pushover analyses. J. Struct. Eng. ASCE 130(8), 1177–1185 (2004). Published online: 15 July 2004. https://doi.org/10.1061/(ASCE)0733-9445(2004)130:8(1177)
Daniel, Y., Lavan, O.: Allocation and sizing of multiple tuned mass dampers for seismic control of irregular structures. In: Lavan, O., De Stefano, M. (eds.) Seismic Behaviour and Design of Irregular and Complex Civil Structures, pp. 323–338. Springer, Dordrecht (2013). https://doi.org/10.1007/978-94-007-5377-8_22
Lavan, O., Daniel, Y.: Full resources utilization seismic design of irregular structures using multiple tuned mass dampers. Struct. Multidisc. Optim. 48, 517–532 (2013). Published online: 02 April 2013. https://doi.org/10.1007/s00158-013-0913-x
Liu, D.K., Yang, Y.L., Li, Q.S.: Optimum positioning of actuators in tall buildings using genetic algorithm. Comput. Struct. 81(32), 2823 (2003). Published online: December 2003. https://doi.org/10.1016/j.compstruc.2003.07.002
Michalis, F., Vamvatsikos, D., Monolis, P.: Evaluation of the influence of vertical irregularities on the seismic performance of a nine-story steel frame. Earthq. Eng. Struct. Dyn. 35, 1489–1509 (2006). Article first published online: 19 June 2006. https://doi.org/10.1002/eqe.591
Moelhe, J.P.: Seismic response of vertically irregular structure. J. Struct. Eng. ASCE 110, 2002–2014 (1984). Published online: 01 September 1984. https://doi.org/10.1061/(ASCE)0733-9445(1984)110:9(2002)
Nazarimfrad, E., Mehdi, S.: Seismic control of irregular multistory buildings using active tendons considering soil-structure interaction effect. Soil Dyn. Earthq. Eng. 89, 100–115 (2016). Published online: October 2016. https://doi.org/10.1016/j.soildyn.2016.07.005
Narzarimofrad, E., Farahani, S., Zahrai, S.M.: Multiobjective optimal placement of active tendons to control irregular multistory buildings with soil-structure interaction. Struct. Des. Tall Spec. Build. e1581 (2018). First published: 26 December 2018. https://doi.org/10.1002/tal.1581
Rao, A.R., Sivasubramanian, K.: Comparative study on multi-objective genetic algorithms for seismic response control of structures. J. Sound Vib. 311(1–2), 133 (2008). First published: 2013. https://doi.org/10.4018/978-1-4666-2029-2.ch014
Rao, S.S., Pan, T.S., Venkayya, V.B.: Optimal placement of actuators in actively controlled structures using genetic algorithms. AIAAJ 29(6), 942 (1991). Published online: 17 May 2012. https://doi.org/10.2514/3.10683
Rather, F., Alam, M.: Seismic control of structures with mass irregularities through optimally placed active tendons using multiobjective genetic algorithm. In: Virtual Conference on Disaster Risk Reduction (VCDRR 2021) (2021)
Rather, F., Alam, M.: Seismic response control of structures with stiffness irregularities through optimally placed active tendons using multiobjective genetic algorithm. In: Proceedings of 12th Engineering Convention. An International Event SEC (2020)
Sayyed, O., Kushwah, S.S., Rawat, A.: Seismic analysis of vertical irregular RC building with stiffness and setback irregularities. IOSR J. Mech. Civil Eng. (IOSR-JMCE) 14(1), 40–45 (2017). e-ISSN 2278-1684, p-ISSN 2320-334X, ver. VI. Article first published online: February 2017. https://doi.org/10.9790/1684-1401064045
Sophocleous, A.A.: Seismic control of regular and irregular buildings using viscoelastic passive dampers. J. Struct. Control 8(2) (2006). Published online: 20 December 2006. https://doi.org/10.1002/stc.4300080211
Tremblay, R., Poncet, L.: Seismic performance of concentrically braced steel frames in multistory buildings with mass irregularity. J. Struct. Eng. 131, 1363–1375 (2005). Published online: 01 September 2005. https://doi.org/10.1061/(ASCE)0733-9445(2005)131:9(1363)
Valmundson, E.V., Nau, J.M.: Seismic response of building frames with vertical structural irregularities. J. Struct. Eng. ASCE 123(1), 30–41 (1997). Article first published online: 01 January 1997. https://doi.org/10.1061/(ASCE)0733-9445(1997)123:1(30)
Vinod, K.S., Gregory, A.M., Brucel, D.: Determination of structural irregularity limits-mass irregularity example. Bull. NZ Soc. Earthq. Eng. 42, 288–301 (2009)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Rather, F., Alam, M. (2022). Optimal Placement of Active Tendons to Control Seismic Structural Response with Dual Irregularities - Mass and Stiffness. In: Fonseca de Oliveira Correia, J.A., Choudhury, S., Dutta, S. (eds) Advances in Structural Mechanics and Applications. ASMA 2021. Structural Integrity, vol 19. Springer, Cham. https://doi.org/10.1007/978-3-030-98335-2_6
Download citation
DOI: https://doi.org/10.1007/978-3-030-98335-2_6
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-98334-5
Online ISBN: 978-3-030-98335-2
eBook Packages: EngineeringEngineering (R0)