
Abstract
Power quality problems are an issue that requires, each more, particular attention, among others, to prevent equipment failure and improve efficiency. In this context, this paper presents a three-phase four-wire multilevel AC-DC converter operating as a shunt active power filter aiming to reduce the current harmonic distortion, low power factor, and current unbalances, which are introduced by the non-linear loads. The proposed topology comprises a total of six full bridges, where every two full bridges are arranged in a cascade structure and connected to one of the phases of the power grid. Both the proposed topology, as well as the applied control algorithm, are validated using computer simulations considering the most relevant conditions of operation in an industrial environment. The obtained results validate the proposed three-phase multilevel converter when operating as a shunt active power filter, showing that the power quality problems presented in the currents are compensated and the converter operates with the multilevel characteristic for all the conditions of operation.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
Driven by the evolution of technology, a great majority of the equipment that people resort to contains an electrical/electronic system, which consequently leads to a gradual increase in the consumption of electrical energy. Being essential for the people’s daily lives and industries, the expectations are that by the year 2030, the demand for energy in the world will increase about 21% [1]. Therefore, it is essential to develop equipment that ensures an optimum power quality, by reducing or mitigating power quality problems. At the beginning of the power grids, there were only linear loads, i.e., loads that consume currents with the same waveform as the voltage, which means that the power factor was the main problem. However, with the evolution of electronics, new power electronics systems were developed, where, instead of the usual linear loads, appear non-linear loads, meaning that the current and voltage do not have the same waveform. The proliferation of non-linear loads, such as computers, televisions, household appliances, variable speed drives, uninterruptible power supplies, fluorescent lamps and LEDs, arc welding systems, led to a decrease in cost, an increase in efficiency, and greater control, but new problems appeared, such as harmonic current distortion [2, 3]. The existence of harmonics in the power grid causes several problems, such as an increase in losses, leading to greater heating in equipment such as conductors, transformers, and motors. The harmonic distortion decreases the power factor and in the presence of capacitor banks for power factor correction can accentuate the harmonic distortion due to resonance phenomena. Harmonics cause interference in communication equipment and erratic operation of protection systems, besides causing a malfunction in electronic equipment [4, 5].
Furthermore, there are other power quality problems, such as momentary interruptions, swells, swags, flickers, notches, transients, current and voltage imbalances, and electromagnetic interference [6]. Industrial facilities are the largest producers of current harmonics since its processes use variable speed drives for motors, electric furnaces, electric welders, and energy-saving devices, such as uninterruptible power supplies (UPS) which all lead to a deterioration of the power quality and consequently to high monetary losses. In an industrial context, in addition to higher energy bills, there are other associated costs such as production interruption, the production of defective products, and increased maintenance costs [7]. In the European industry, power quality problems cost more than 150 billion euros per year [8].
Power quality problems have been studied, to find solutions to mitigate them. For the compensation of the power factor, initially was developed the capacitor bank, being a cheap device, but that only compensates a fixed value of reactive power [9]. For current harmonics compensation, passive filters were initially used, which were tuned only to filter a single frequency but could create resonance phenomena which can be a huge problem [10]. To compensate simultaneously the power factor and the current harmonics, an active parallel power filter was developed. As presented in [11], this equipment allows a dynamic compensation, and compensates the power factor, current harmonics and compensates the current imbalances in three-phase systems. Besides parallel active filters, there are also series active filters that compensate for voltage problems such as presented in [12]. When it is necessary to compensate power quality problems related to voltage and current, a unified power quality conditioner (UPQC) can be used, which is a junction of a shunt active filter and a series active power filter [13].
Over time, the industry has evolved as new techniques and technologies have been developed and it is currently facing the fourth industrial revolution, called industry 4.0. Industry 4.0, which is characterized by the introduction of information and communication technologies, will contribute to make factories intelligent, becoming autonomous and efficient. The areas of automation, control, information technology, integrates the main technologies applied to the manufacturing process in this industrial revolution [14, 15]. Industry 4.0 is based on the following principles [16]: Acquisition and processing of data in real-time, allowing a fast and effective decision making; Existence of a virtual copy of the plants for remote tracking and monitoring of all processes; Decentralization of production processes. The modules of the intelligent factory work in a decentralized way; Production according to demand, creating flexible and self-adjusting manufacturing environments; Use of service-oriented software architectures.
Cyber-physical systems are the basis of the Industry 4.0, which consists of the combination of a software component with mechanical and electronic parts. Control, monitoring, and data exchange are usually performed over the Internet. These systems include sensors, mechanical components, and actuators [17]. The sensors acquire the data, then the data is sent to network-based services, where it’s processed, and then as the data is processed, orders are given to the actuators. With Industry 4.0, there is constant communication between physical, digital, and human systems. Concepts such as artificial intelligence, big data, IoT, process simulation, intelligent sensors, advanced human-machine interfaces, cloud computing, and virtual reality will play a key role in the 4.0 industry [15, 18].
Aligned with this context, this paper proposes a three-phase multilevel AC-DC converter operating as a shunt active power filter, where the performed validation was carried out considering the real behavior, in terms of current consumption, of the presented loads in an industry. The organization of the paper is as follows: Sect. 2 presents the proposed topology and the principle of operation; Sect. 3 presents the control algorithm, explaining the implemented control techniques; Sect. 4 presents the simulation results obtained through the PSIM software; Sect. 5 presents the main conclusions.
2 Three-Phase Multilevel Converter: Adopted Topology
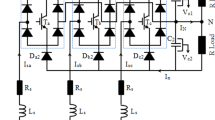
In systems that deal with high levels of power, such as industries that are powered by medium voltage, the use of multilevel inverters is an excellent solution, being equipment increasingly used in power electronics [19]. The use of these converters implies the use of a greater number of power semiconductors, but the semiconductors do not have to support such high voltages ratings. Initially, DC-AC converters were used, which produced two or three levels in the output voltage. With the use of multilevel converters, it is possible to generate more output voltage levels, and the more the levels produced, the better is the quality of the output voltage, having less harmonic distortion. Also, there is a reduction of dv/dt and allows a reduction of the switching frequency, reducing the switching losses [20]. There are several topologies of multilevel inverters, the most used are diode clamped, capacitor clamped, and cascade H-Bridge (CHB). The single-phase H-Bridge cascade H-Bridge multilevel converter is based on the serial connection of two or more full-bridge converters. This topology compared to other multilevel topologies does not require diodes and capacitors. The output voltage is the sum of the voltage produced by each converter. Each converter is called a cell, and each cell can produce three voltage levels. For a converter with n cells, the number of voltage levels produced is 2n + 1 [20]. In Fig. 1 it is presented the proposed topology of the three-phase multilevel converter. Considering that there are two independent DC-links per converter, two PI controllers are implemented, one for each DC-link. Each of them works either in the positive semi-cycle or in the negative semi-cycle of the grid voltage [21]. This way when the grid voltage is higher than zero, the voltage of the upper bus (vdc1) is controlled, and when the grid voltage is lower than zero, the voltage of the lower bus (vdc2) is controlled. As mentioned above, five voltage levels are produced at the output of each converter. The voltage levels produced at the output of each converter are +vdc (vdc1 + vdc2), +vdc/2 (vdc1), 0, −vdc/2 (vdc2) and −vdc (−vdc1 − vdc2). This type of converter presents several redundant states to synthesize +vdc/2, −vdc/2, and 0. Thus, to load each dc-link individually in both the positive and negative semi cycle of the grid voltage, it is necessary to select states that allow the current to circulate on the desired DC-link. The following table presents the voltage levels produced, as well as the semiconductors that are connected to produce a certain voltage level. In Table 1, it is represented the states for a single-phase converter, where the output voltage for each phase is between vxy. Since it is implemented two single-phase converters equal to the single-phase converter, the voltage levels are produced are the same on each converter.

Proposed three-phase multilevel converter.
3 Three-Phase Multilevel Converter: Control Algorithm
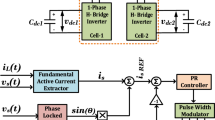
The power required to regulate the voltage on each DC-link is calculated in the first instance. To calculate this power, two proportional-integral (PI) controllers are used. Next, the Fryze-Buchholz-Depenbrock power theory (FBD) is applied, to calculate the reference current for the current of each multi-level converter. After the reference current is calculated, current control is applied to calculate the reference voltage that each converter must produce, and this voltage is used for pulse-width modulation (PWM) modulation, to control the switching of power semiconductors. The explanation of power theory, current control, PWM modulation, will be made for one phase, and since the three multilevel converters operate independently for the other phases, the control is the same, being only replicated. To determine the reference of current, the FBD power theory was used. This theory is based on determining the current component that must be supplied by each phase of the power grid, a sinusoidal current in phase with the voltage of the power grid, with the same effective value and 120° apart from the currents of the other phases [22]. The goal is that the power grid provides only the active power, and the harmonics and reactive power are provided by the multilevel converter. The control block diagram applied to each phase of the multilevel is represented in Fig. 2.

Block diagram of the proposed control structure for each phase of the converter.
For this purpose, the total power is calculated and the average power, which is the three-phase active power, is calculated. Then the three-phase power is divided by three to determine the power that each phase must provide. This power theory is based on the representation of a load by a conductance in parallel with a current source [22]. The conductance corresponds to the power component of the load that the power grid must provide, i.e., the active power. The current source represents the reactive power and the harmonics that the load consumes. From here, Eq. (1) is used to calculate the reference of current for each phase. Knowing the current in each phase (il) and the reference of current of each phase (igref), a subtraction is made between these two currents to obtain the reference current for each phase of the multilevel converter (if_ref*), being represented in Eq. (2). Adding Eq. (1) to Eq. (2) gives Eq. (3) where vg represents the instantaneous value of the voltage in the mains and vg is the rms value of the grid voltage, where P represents the active power that the grid must provide for each phase and Preg is the power to regulate the DC-link. Each DC bus has an independent PI controller, which allows the DC buses to be loaded separately using the applied PWM modulation level shifting, which is explained in this chapter.
The phase-locked loop (PLL) algorithm is applied for synchronization with the grid voltage. The PLL algorithm produces a sinusoidal signal in phase with the fundamental component of the power grid voltage [23]. This signal produced is used in the calculation of the reference current because it allows the reference current to be sinusoidal, even for a distorted voltage. Equation (4) is used to calculate the reference current, replacing the grid voltage values in Eq. (1). Once the reference current has been calculated, it is used for current control.
After analyzing the converter and its connection to the power grid, the following equations could be described:
The voltage produced by the converter (vxy_ref), in each phase, is equal to the sum of the grid voltage (vg) and the voltage in the coupling filter (vL). By applying the Euler method, it is possible to transform Eq. (6) to the discrete domain, obtaining Eq. (7), where L represents the coupled inductor, Ts represents the sampling period, and ifn it represents the current in the converter. The reference voltage is then compared with a triangular carrier, and the PWM modulation is applied [24, 25]. Three reference currents are calculated, one current for each phase.
The PWM modulation used for the control of semiconductors is based on the level-shifted, which consists of four triangular carrier waves in phase, with the same frequency, with the same amplitude, but with different mean values [26]. The reference signal obtained in Eq. (7), is a sinusoidal signal. After obtaining this sinusoidal reference, it is divided into two modified sinusoidal references. In Fig. 3 (a) and (b), these two modified sinusoidal references are presented. The division of the reference signal in two is due to the fact that the proposed multilevel converter has many redundant states as seen in Sect. 2, and so, to select only the needed ones. Considering only one phase of the proposed topology, the upper full-bridge is modulated by the modified sinusoid sin1 (Fig. 3 (a)) and the lower full-bridge by the modified sinusoid sin2 (Fig. 3 (b)).
When the reference signal is greater than 0, the modified sinusoid (sin1) is used and S1, S2, S3, S4 are switched and S5 and S8 are on and S6 and S7 are off, to get +vdc, +vdc/2, and 0. When the reference signal is less than 0, the changed sinusoid (sin2) is used and S5, S6, S7, S8 are switched and S2 and S3 are on and S1 and S4 are off, to obtain −vdc,−vdc/2 and 0. Figure 4 shows the output voltage of the inverter, where the five voltage levels can be checked. This figure also shows the reference voltage that results from the applied current control. Figure 5, presents the state of each IGBT, where the switching of each IGBT is displayed according to the value of the reference voltage.

PWM modulation: (a) PWM carriers and the reference signal sin1; (b) PWM carriers and the reference signal sin2.

The output voltage (vxy) and voltage reference (vxy_ref) of the proposed multilevel converter.

Pulse-patterns applied to the IGBTs (S1 to S8) of phase a of the proposed multilevel converter.
4 Three-Phase Multilevel Converter: Computer Validation
This section presents a set of validations resorting to the software simulation tool PSIM. To perform the validation, the DC-links are set at 200 V each to guarantee that the sum of both DC-links presents a higher value than the peak voltage (325 V) of the grid, per phase. The main goal of the computer simulation is to validate the successful operation of the converter as an active power filter, filtering current harmonics.
To validate the operation as shunt active power filter, two different experiments were made. The first experiment consists, in a steady-state, to verify if the active power filter can compensate the harmonic current and guarantee a sinusoidal current waveform on the power grid side. The second experiment consists of starting in a steady state without harmonic loads and then introduce harmonic loads to ensure the dynamic response of the converter. To perform the experiments based on a real industrial environment, three single-phase rectifiers with a RC filter were used in each phase to emulate the loads of the industry, as well as one RL load per phase and one R load per phase. The tests were also carried out considering a distorted voltage (THD%v) of 4% to emulate the real three-phase voltages.
The first experiment is executed with the converter in a steady-state and with the previously described load connected to it. Figure 6 presents the power grid voltages, where it is considered a THD%v value of 4%, as well as the currents consumed by the emulated loads, presenting a THD%i value of about 34%.

Results showing the power grid voltages (vga, vgb, vgc) and the consumed currents (ila, ilb, ilc) by the loads.
The shunt active power filter control algorithm calculates the compensation currents, and as can be seen in Fig. 7, the shunt active power filter produces the compensation currents to obtain a sinusoidal waveform on the power grid side. The compensation currents produced by the shunt active power filter are not going to be symmetrical with the current consumed by the loads since the DC-link needs to be kept balanced, allowing the power grid to only provide the active power needed by the loads.

Validation, in steady-state, of the proposed multilevel AC-DC converter operating as shunt active power filter: Compensation currents (ifa, ifb, ifc); Power grid currents (iga, igb, igc).
With this operation, it is possible to verify that the current total harmonic distortion (THD%i) was reduced from around 34% on each phase to 3.78% on phase A, 3.80% on phase B, and 3.90% on phase C. Figure 8 presents the grid-side voltage and current. It’s possible to observe that voltage is in phase with the generated current by the multilevel converter and that the power factor is 0.98.

Validation, in steady-state, of the multilevel AC-DC converter showing in detail, as example for phase c, the power grid current (igc) and the power grid voltage (vgc).
The second experiment aims to validate that the active power filter can compensate for the load’s current in a transitory situation. In order to perform this validation, only the non-harmonic loads are connected to the converter, which means that only the dc-link is being controlled. Then the harmonic loads are connected to the converter with the goal to verify if the active power filter can properly calculate the compensation currents and reduce the harmonic distortion of the currents. Figure 9 presents the currents measured on the loads, grid, and filter. It is possible to observe the moment when the harmonic loads are connected (0,1 s) as well as the moment where the filter starts to produce the compensation currents (0,1 s) to keep the grid waveform sinusoidal and with low harmonic content. Figure 10 presents the voltage output waveform of each one of the converters that compose this three-phase system. It is possible to observe at 0,1 s the moment when the harmonic loads are connected because the dc-link sinks for a short moment and then recovers as the filter starts compensating.

Validation, in transient-state, of the multilevel AC-DC converter, showing: The currents consumed by the loads (ila, ilb, ilc); The power grid side currents (iga, igb, igc); The compensation currents (ifa, ifb, ifc) of the multilevel AC-DC converter.

Validation, in steady-state, of the multilevel AC-DC converter regarding the produced voltages (vxya, vxyb, vxyc), showing in detail the five voltage levels in each phase.
5 Conclusions
Nowadays, in an industrial context, a large amount of the presented loads is characterized by a non-linear behaviour, meaning that the consumed currents present harmonic distortion, leading to deteriorate power quality. Additional, low power factor and unbalances are also critical power quality problems that are presented in industries. As a contribution to mitigate such problems, this paper proposes a three-phase multilevel AC-DC converter, with five different levels, operating as shunt active power filter considering an industrial environment. Due to the fact that this converter can operate with five voltage levels, it allows to reduce, even more, the THD value of the power grid currents when compared to traditional topologies with fewer voltage levels. In this paper, for the adopted multilevel AC-DC converter, the dedicated digital control algorithm is presented, as well as the PWM specific to this converter, allowing to control the DC-links voltages depending on whether the half-cycle of the power grid voltage (i.e., during the positive or negative half-cycle), which improves their voltage balance since they are independent in terms of control. The adoted multilevel AC-DC converter was validated in two different situations: in a steady-state situation and in a transient-state situation. By analysing the obtained results, it is possible to observe that the THD%i value of each phase was reduced from 34% to approximately 4%, while the THD%v of the voltages has a value of around 4%. Even though the THD%i is still 4%, the obtain power factor was almost unitary. The presented results show the correct performance of the adopted multilevel AC-DC converter. Compared to traditional topologies that produce fewer voltage levels, although it applies more semiconductors, the semiconductors are not exposed to such a high dv/dt, which is beneficial since it allows the application of semiconductors with a lower voltage rating. Additionally, since the adopted multilevel AC-DC converter also permits the connection of renewable energy sources on each independent DC-link, represents another important advantage.
References
Ferroukhi, R., et al.: Renewable energy benefits: measuring the economics. IRENA Int. Renew. Energy Agency 92 (2016)
Akagi, H.: New trends in active filters for improving power quality. In: Proc. IEEE Int. Conf. Power Electron. Drives Energy Syst. Ind. Growth, PEDES, vol. 1, pp. 417–425 (1996)
Motta, L., Faundes, N.: Active / passive harmonic filters: Applications, challenges & trends. In: 2016 17th International Conference on Harmonics and Quality of Power (ICHQP), vol. 2016, no. 1, pp. 657–662 (2016)
Godbole, P.: Effect of harmonics on active power flow and apparent power in the power system. IOSR J. Electron. Commun. Eng. 39–43 (2013)
Subjak, J.S., McQuilkin, J.S.: Harmonics-causes, effects, measurements, and analysis: an update. IEEE Trans. Ind. Appl. 26(6), 1034–1042 (1990)
Afonso, Martins, Couto: Qualidade de energia eléctrica. In: Robótica Automação, Control. Instrumentação, vol. 9, pp. 219–231 (2003)
Patrão, C., Delgado, J., De Almeida, A.T., Fonseca, P.: Power quality costs estimation in portuguese industry. In: Proceeding Int. Conf. Electr. Power Qual. Util. EPQU, pp. 337–342 (2011)
Targosz, R., Chapman, D.: Cost of Poor Power Quality, pp. 1–13 (2012)
Dai, H., Wang, Y., Li, X., Ming, Z., Deng, H.: Characteristic analysis of reactive power compensation device at HVDC converter station. In: 2012 Asia-Pacific Power and Energy Engineering Conference, pp. 1–5 (2012)
Marques, H.S., Anunciada, V., Borges, B.V.: Power grid current harmonics mitigation drawn on low voltage rated switching devices with effortless control. Int. J. Electr. Power Energy Syst. 32(1), 87–99 (2010)
Pinto, J.G., Neves, P., Goncalves, D., Afonso, J.L.: Field results on developed three-phase four-wire Shunt Active Power Filters. In: 2009 35th Annual Conference of IEEE Industrial Electronics, pp. 480–485 (2009)
Pinto, J.G., Carneiro, H., Exposto, B., Couto, C., Afonso, J.L.: Transformerless series active power filter to compensate voltage disturbances. In: Proceedings of the 2011 14th European Conference on Power Electronics and Applications, EPE 2011, no. Epe, pp. 1–6 (2011)
Virmani, R., Gaur, P., Santosi, H., Mittal, A.P., Singh, B.: Performance comparison of UPQC and Active Power Filters for a non-linear load. In: 2010 Joint International Conference on Power Electronics, Drives and Energy Systems & 2010 Power India, pp. 1–8. (2010)
Shrouf, F., Ordieres, J., Miragliotta, G.: Smart factories in Industry 4.0: A review of the concept and of energy management approached in production based on the Internet of Things paradigm. In: 2014 IEEE International Conference on Industrial Engineering and Engineering Management, vol. 2015, pp. 697–701 (2014)
Da Xu, L., Xu, E.L., Li, L.: Industry 4.0: State of the art and future trends. Int. J. Prod. Res. 56(8), 2941–2962 (2018)
Habib, M.K., Chimsom, C.: Industry 4.0: Sustainability and design principles. In: Proceedings of the 2019 20th International Conference on Research and Education in Mechatronics, REM 2019, vol. 5, pp. 1–8 (2019)
Jiang, J.R.: An improved Cyber-Physical Systems architecture for Industry 4.0 smart factories. In: Proc. 2017 IEEE Int. Conf. Appl. Syst. Innov. Appl. Syst. Innov. Mod. Technol. ICASI 2017, pp. 918–920 (2017)
Chen, B., Wan, J., Shu, L., Li, P., Mukherjee, M., Yin, B.: Smart factory of industry 4.0: key technologies, application case, and challenges. IEEE Access 6, 6505–6519 (2017)
Gaikwad, A., Arbune, P.A.: Study of cascaded H-Bridge multilevel inverter. In: Int. Conf. Autom. Control Dyn. Optim. Tech. ICACDOT 2016, pp. 179–182 (2017)
Mittal, N., Singh, B., Singh, S., Dixit, R., Kumar, D.: Multilevel inverters: A literature survey on topologies and control strategies. In: 2012 2nd International Conference on Power, Control and Embedded Systems, pp. 1–11 (2012)
Monteiro, V., Sousa, T.J.C., Sepulveda, M.J., Couto, C., Martins, J.S., Afonso, J.L.: A Novel Multilevel Converter for On-Grid Interface of Renewable Energy Sources in Smart Grids. In: 2019 International Conference on Smart Energy Systems and Technologies (SEST), pp. 1–6 (2019)
Staudt, V.: Fryze - Buchholz - Depenbrock: A time-domain power theory. In: 2008 International School on Nonsinusoidal Currents and Compensation, pp. 1–12 (2008)
Karimi-Ghartemani, M., Iravani, M.R.: A new phase-locked loop (PLL) system. In: Proceedings of the 44th IEEE 2001 Midwest Symposium on Circuits and Systems. MWSCAS 2001 (Cat. No.01CH37257), vol. 1, pp. 421–424 (2001)
Kazmierkowski, M.P., Malesani, L.: Current control techniques for three-phase voltage-source pwm converters: a survey. IEEE Trans. Ind. Electron. 45(5), 691–703 (1998)
Araujo, A., Pinto, J.G., Exposto, B., Couto, C., Afonso, J.L.: Implementation and comparison of different switching techniques for shunt active power filters. In: IECON 2014 - 40th Annual Conference of the IEEE Industrial Electronics Society, pp. 1519–1525 (2014)
Aspalli, M.S., Wamanrao, A.: Sinusoidal pulse width modulation (SPWM) with variable carrier synchronization for multilevel inverter controllers. In: 2009 Int. Conf. Control Autom. Commun. Energy Conserv. INCACEC 2009, pp. 1–6 (2009)
Acknowledgment
This work has been supported by FCT – Fundação para a Ciência e Tecnologia within the R&D Units Project Scope: UIDB/00319/2020. This work has been supported by the FCT Project newERA4GRIDs PTDC/EEI-EEE/30283/2017.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 ICST Institute for Computer Sciences, Social Informatics and Telecommunications Engineering
About this paper

Cite this paper
Nova, B., Vaz, D., Passos, P., Monteiro, V. (2022). A Three-Phase Multilevel AC-DC Converter Operating as a Shunt Active Power Filter: Validation Considering an Industrial Environment. In: Afonso, J.L., Monteiro, V., Pinto, J.G. (eds) Sustainable Energy for Smart Cities. SESC 2021. Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering, vol 425. Springer, Cham. https://doi.org/10.1007/978-3-030-97027-7_9
Download citation
DOI: https://doi.org/10.1007/978-3-030-97027-7_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-97026-0
Online ISBN: 978-3-030-97027-7
eBook Packages: Computer ScienceComputer Science (R0)