
Abstract
In this paper the simulation of the battery storage system connected to the grid with the possibility of active and reactive power control is presented. Considered battery storage system has the ability to inject the active power when there is a lack of active power and the reactive power when there is a lack of reactive power in the grid. Amount of the active and the reactive power injected to the grid are defined according to the active and reactive power demand. Battery storage system is connected to the grid over the two-way DC-AC converter with the IGBT switches. Model of the battery storage system is based on Typhoon HIL grid connected battery storage, but some improvements have been made on the model. Model is consisted of two parts. The first part is the battery storage model in the schematic editor and the second part is the monitoring and the control interface in SCADA. Model in the schematic editor is consisted of electric and signal parts and all used components are described in the paper. Simulation of the battery storage system with the possibility of active and reactive power control in Typhoon HIL is done and the impact on the grid voltage and the frequency is visible according to the simulation results.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
In the power system, there is a strong impact of active power to the grid frequency and reactive power to the grid voltage. In the conventional power system, energy flow is in the one way, from electricity production in the large power plants, over the transmission and distribution grid, to the end-customers. The production output power needs to be equal to sum of the consumption power and the system losses to keep power system in the balance. The nominal grid frequency is 50 Hz in the Europe and 60 Hz in the USA, if the grid frequency is lower or higher than the nominal frequency, the power system is unbalanced.
The grid frequency is lower than the nominal frequency if the production output power is lower than the sum of the consumption power and the system losses. To increase the grid frequency, it is required from generators in the power plants to increase the output power. The grid frequency is higher than the nominal frequency if the production output power is higher than the sum of the consumption power and the system losses. To decrease the grid frequency, it is required from generators in the power plants to decrease the output power.
While the active power balance is related to the frequency, the reactive power balance is related to the voltage. If there is a lack of the inductive reactive power, the grid voltage is lower than the nominal voltage. It is required to inject additional inductive reactive power to increase voltages. In conventional power systems, condenser batteries and synchronous machines are usually used for reactive power compensation. If there is a exceed of the inductive reactive power, the grid voltage is higher than the nominal voltage. It is required to take the exceed of inductive reactive power from the grid to decrease voltages. Highest voltages are occurred during periods of low consumption which were leading to needs for regulation coil installations.
In the power grids with the high amount of electricity produced in renewable energy sources (RES) is hard to keep the balance between production and consumption whole time because of the variability of RES, especially wind and solar energy. There is a possibility to install a battery energy storage system (BESS) which have ability of active and reactive power control which than have impact to the grid frequency and the voltage. Working principle of the BESS can be observed in the four cases:
-
If the consumption of active power is higher than the active power available in the grid, BESS injects active power to the grid.
-
If the consumption of active power is lower than the active power available in the grid, BESS receives active power from the grid.
-
If the consumption of reactive power is higher than the reactive power available in the grid, BESS injects reactive power to the grid.
-
If the consumption of reactive power is lower than the reactive power available in the grid, BESS receives reactive power from the grid.
Different cases are possible thanks to using of controllable bidirectional AC-DC converter so the energy way, the current phase angle, which is directly related to the active and reactive power and the amount of power can be easily controlled.
There are many researches related to the using of battery storage systems with ability of active and reactive power control in the last decade. Main focus is on the using of BESS for that applications.
A new control strategy for PV system with BESS in microgrids, with possibility of voltage and frequency control is presented in [1]. The control strategy, proposed in [2], presents effective coordination between inverter V-f and P-Q control, MPPT control and energy storage charging and discharging control. A cascade control method based on external controller that regulates the active and reactive power to generate reference currents and internal current controller that produces signals for driving inverter switches is presented in [3]. In [4], a set of PI controller for active and reactive power in the system control is presented.
The ability of reactive power compensation of PV system in combination with battery storage is effective for improving voltage according to [5]. In [6], an energy management algorithm for a grid connected PV battery system is presented. In [7], detailed mathematical model and a control algorithm of a three-phase grid-connected intelligent hybrid system is presented. Battery energy storage system can be used to store energy produced in PV system for later use or to store energy from the grid when the price of electricity is low according to [8].
The possibility of active and reactive power control of battery storage is very important in weak distribution networks where change in the amount of load power leads to significant change of voltage [9]. In [10], battery storage system is used to compensate fluctuations of PV output power caused by solar irradiation and temperature changes. Use of battery storage systems in power grids can help to keep the balance between production and consumption of electricity in power system [11]. In [12], a design of an voltage source converter with ability of bidirectional active and reactive power control in a grid connected battery system is presented.
A method for improving the voltage stability, by injecting correct amount of active and reactive power from BESS, is presented in [13]. Batteries connected to the grid using controllable inverter have ability to provide reactive power to the grid, without using of any other compensation device, which is presented in [14]. In [15], Voltage Source Inverter (VSI) control method with ability to control active and reactive power exchange between the single-phase grid and the load, is presented. Active and reactive power control method, between a battery bank and single-phase local grid, is proposed in [16].
The main contribution of this paper is to show the impact of BESS to grid frequency and voltage through the simulation in Typhoon HIL software package. Decision on the amount of active/reactive power injected to/received from the grid is made according to load active and reactive power. Model in Typhoon HIL is based on the grid connected battery storage model with some modifications and improvements. Controllable three phase load is connected in the grid side of converter, frequency signal is enabled in SCADA interface, signal part is modeled in two separate parts to make it simpler and clearer. Frequency and voltage monitoring on trace graphs, load control unit, battery state of charge on trace graph, separate trace graphs for active and reactive power and digital displays are added in SCADA interface. Amount of active/reactive power injected to/received from the grid cannot be selected manually because it is determined automatically according to load active and reactive power.
This paper is divided into four chapters. First chapter gives introduction to the needs for frequency and voltage regulation in the power grid. The model of the BESS is presented in Chapter 2. In Chapter 3, the simulation of the BESS is done and results are presented. Results discussion and conclusion are given in Chapter 4.
2 Battery Storage Model
Battery storage system model is consisted of two main parts, model in the Typhoon HIL program part called schematic editor and SCADA control and monitoring interface. Model in the schematic editor is consisted of two main parts, first is the electric part and second is the signal part. Block diagram of battery energy storage system model is presented in Fig. 1.

Block diagram of battery storage system model.
2.1 Electric Part of the Battery Storage Model
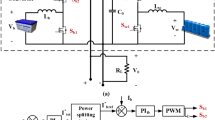
Electric part of the BESS model is consisted of battery, bidirectional AC-DC IGBT converter, filter, current and voltage measurements, grid and the controllable load. Schematic diagram of electric part of battery storage model is presented in Fig. 2.

Schematic diagram of battery storage model.
Battery.
Battery in Typhoon HIL is modelled as a controlled voltage source with a series resistance. There are four standard predefined battery technologies available to choose: Lead-acid (Pb-acid), Lithium-ion (Li-ion), Nickel-Cadmium (NiCd) and Nickel-Metal Hydride (NiMH). It is possible that user defines own battery type if he uses some other battery technology which is not predefined in software. For all battery technologies, the nominal voltage, battery capacity in Ah and the initial state of charge (SOC) can be manually defined. In this paper, Li-ion battery technology is used. Figure 3 presents battery component connected in the battery storage model.

Battery component used in battery storage model.
Converter.
As a bidirectional converter is used three-phase two-level inverter. This component is modeled with using of the ideal IGBT switches and diodes. Inverter can be controlled with the using of internal modulator, with the model control signals and with the digital inputs per switch or per leg. In this case, inverter is controlled with the using of internal modulator which means that internal PWM modulator is used to driving switches. Four signals are required for this control mode, first is signal for enabling the internal modulator and other are reference input signals for all three phases. Inverter can work at the fixed and the variable carrier frequency. In this case, operation mode is at fixed carrier frequency of 10 kHz. Inverter component, with reference signals inputs and enable signal input, is presented in Fig. 4.

Inverter component used in battery storage model.
Filter.
Electronic components produce harmonics which are unwanted in the power grid. Passive LC filter is used to reduce harmonics injected in the power grid from the inverter. Passive LC filter, used in this model, is presented in Fig. 5.

LC filter used in battery storage model.
Current and Voltage Measurements.
Current measurements are used for measuring battery current, phase currents and phase RMS currents. Voltage measurements are used for measuring battery voltage, phase voltages, line voltages, phase and line RMS voltages. Measurements components have output signals that can be used for model signal part and in the SCADA interface. Figure 6 represents current and voltage measurements. On the left, there are current and RMS currents measurements, in the middle, there are phase voltages and phase RMS voltages measurements, on the right, there are line voltages and line RMS voltages measurements.

Current and voltage measurements.
Grid.
Grid in Typhoon HIL is modelled as three single phase voltage sources with the series resistances and inductances, presented in Fig. 7. This is used for simulation of symmetric three phase grid. There is possibility to measure phase currents and phase and line voltages. Nominal line voltage and grid frequency can be manually defined. Grid can be defined in three different ways, with resistance and inductance per phase which is used in this case, then with short circuit capacity and power factor and with short circuit capacity and X/R. In this case nominal line voltage is 400 V. nominal frequency is 50 Hz, resistance per phase is 0.0001 ohm and 20 μH. This results with low grid impedance and high X/R ratio which means that grid is very strong.

Grid component used I battery storage model.
Load.
As a controllable load is used three-phase constant power load component, presented in Fig. 8. This component is modeled as the sine current sources which are controlled to achieve defined power flow according to the active and reactive power references from SCADA or through the signal inputs.

Load component used in battery storage model.
2.2 Signal Part of the Battery Storage Model
Signal part of the BESS model is consisted of power calculation and reference signals calculation. Electric connections and components are in black color while signal connections, components and blocks are in blue color so these two parts can be easily differed from each other.
Power Calculation.
According to the measured phase voltages and phase currents, power meter component calculates instantaneous active power, instantaneous reactive power, average active power, average reactive power, apparent power and power factor. Calculated power values are required in SCADA for monitoring. Block model for calculating power values is presented in Fig. 9.

Block model for calculating power values.
Reference Signals Calculation.
Measured phase current are transformed from three phase abc system to dq rotating reference. Direct and inverse components are then subtracted from direct and inverse reference currents. Reference currents are achieved through SCADA interface. Difference between reference and measured currents is then regulated with PI regulator. Achieved signals are transformed from dq rotating reference to three phase abc system. These three signals are used for control of inverter with internal PWM modulator. Block model for calculating reference signals for driving three phase two-way converter is presented in Fig. 10.

Block model for calculating reference signals.
2.3 SCADA Interface
The purpose of the SCADA interface in this battery storage model is monitoring of phase currents, phase and line voltages, frequency, battery state of charge (SOC), battery voltage and current, active and reactive output power of the battery storage during simulation. There is possibility to control amount of load power.
Voltage and Currents Measurements.
SCADA windows presented in Fig. 11 shows values of phase and line RMS voltages as well as values of phase RMS currents. Digital displays get values from analog signals received from measuring instruments connected in electric model in the real time during simulation.

SCADA voltage and current measurements.
Frequency and Voltage Monitoring.
It is required to monitor frequency and voltage in the real time during simulation. SCADA windows for frequency and voltage monitoring are presented in Fig. 12. Upper window is consisted of trace graph and digital display for monitoring frequency value while window below is consisted of trace graph and digital display for monitoring line voltage RMS value.

SCADA frequency and voltage monitoring.
Load Control.
SCADA window for load control is presented in Fig. 13. There are two trace graphs, first graph shows amount of load active power while second graph shows amount of load reactive power. On the right side, there are two digital displays that show load active and reactive power. There are four buttons for different cases and reset button. By pressing a button, the amount of active and reactive power is changed according to observed case. By pressing a reset button, amount of active and reactive power is changed to default values

SCADA load control.
Battery Monitoring.
Battery monitoring SCADA window is presented in Fig. 14. First graph shows battery SOC and it is very important to monitor battery SOC in the real time. It is recommended to keep battery SOC between 20% and 80%. Second graph shows amount of active power and third graph shows amount of reactive power. If amount of power is positive, it means that BESS inject active or reactive power to the grid and battery is discharging. If amount of power is negative, it means that BESS takes active or reactive power from the grid and battery is charging.

SCADA battery monitoring.
On the left, there are five digital displays. First display shows battery SOC in percent, second display shows battery voltage and third display shows battery current. If the battery current is positive, flow of energy is from battery to the grid, it means that battery is discharging. If the battery current is negative, flow of energy is from grid to the battery, it means that battery is charging. Last two displays show amount of active and reactive power delivered to and received from the grid.
3 Battery Storage Simulation Results
In this chapter, results of simulations will be presented. Simulations are done with and without battery storage system to see the impact of charging and discharging battery storage. Four different cases are simulated as following:
-
Case 1: Load active power is increased, reactive power is remained the same.
-
Case 2: Load active power is decreased, reactive power is remained the same.
-
Case 3: Load reactive power is increased, active power is remained the same.
-
Case 4: Load reactive power is decreased, active power is remained the same.
Default values of controllable load connected to the grid are 40 kW of active power and 20 kvar of reactive power. Figure 15 presents comparison of frequency when values of controllable load are set to default. Left SCADA window shows frequency when battery storage is not available while right SCADA window shows frequency when battery storage is connected. It can be seen that battery storage causes decrease of frequency and frequency with battery is between 49.998 and 49.999 Hz.

Comparison of frequency for default load values.
Figure 16 presents comparison of voltage when values of controllable load are set to default. Left SCADA window shows voltage when battery storage is not available while right SCADA window shows voltage when battery storage is connected. It can be seen that line voltage without battery is 399.67 V and with battery is 399.86 V.

Comparison of voltage for default load values.
3.1 Case 1: Load Active Power Is Increased, Reactive Power Is Remained Same
In this case, load active power is increased from 40 kW to 80 kW while load reactive power remains 20 kvar. Amount of active power injected from the battery storage to the grid is 40 kW, battery storage is discharging in this case to cover increased consumption of active power.
Figure 17 presents comparison of frequency for the case 1. Left SCADA window shows frequency when battery storage is not available while right SCADA window shows frequency when battery storage is connected. It can be seen that with battery storage connected frequency is between 49.997 and 49.998 Hz.

Comparison of frequency for case 1.
Figure 18 presents comparison of voltage for the case 1. Left SCADA window shows voltage when battery storage is not available while right SCADA window shows voltage when battery storage is connected. It can be seen that line RMS voltage without battery is 399.65 V and with battery is 399.76 V.

Comparison of voltage for case 1.
3.2 Case 2: Load Active Power Is Decreased, Reactive Power Is Remained Same
In this case, load active power is decreased from 40 kW to 0 kW while load reactive power remains 20 kvar. Amount of active power received from the grid to the battery storage is 40 kW, battery storage is charging in this case to absorb reactive power excess in the grid caused by decreased consumption of active power.
Figure 19 presents comparison of frequency for the case 2. Left SCADA window shows frequency when battery storage is not available while right SCADA window shows frequency when battery storage is connected. It can be seen that with battery storage connected frequency is between 49.997 and 49.998 Hz.

Comparison of frequency for case 2.
Figure 20 presents comparison of voltage for the case 2. Left SCADA window shows voltage when battery storage is not available while right SCADA window shows voltage when battery storage is connected. It can be seen that line RMS voltage without battery is 399.68 V and with battery is 399.93 V.

Comparison of voltage for case 2.
3.3 Case 3: Load Reactive Power Is Increased, Active Power Is Remained Same
In this case, load reactive power is increased from 20 kvar to 40 kvar while load active power remains 40 kW. Amount of reactive power injected from the battery storage to the grid is 20 kvar, battery storage is discharging in this case to cover increased consumption of reactive power.
Figure 21 presents comparison of frequency for the case 3. Left SCADA window shows frequency when battery storage is not available while right SCADA window shows frequency when battery storage is connected. It can be seen that with battery storage connected frequency is between 49.998 and 49.999 Hz.

Comparison of frequency for case 3.
Figure 22 presents comparison of voltage for the case 3. Left SCADA window shows voltage when battery storage is not available while right SCADA window shows voltage when battery storage is connected. It can be seen that line RMS voltage without battery is 399.33 V and with battery is 399.73 V.

Comparison of voltage for case 3.
3.4 Case 4: Load Reactive Power Is Decreased, Active Power Is Remained Same
In this case, load reactive power is decreased from 20 kvar to 0 kvar while load active power remains 40 kW. Amount of reactive power received from the grid to the battery storage is 20 kvar, battery storage is charging in this case to absorb reactive power excess in the grid caused by decreased consumption of reactive power.
Figure 23 presents comparison of frequency for the case 4. Left SCADA window shows frequency when battery storage is not available while right SCADA window shows frequency when battery storage is connected. It can be seen that with battery storage connected frequency is between 49.998 and 50 Hz.

Comparison of frequency for case 4.
Figure 24 presents comparison of voltage for the case 4. Left SCADA window shows voltage when battery storage is not available while right SCADA window shows voltage when battery storage is connected. It can be seen that line RMS voltage without battery storage is 400.00 V and with battery storage is 400.03 V.

Comparison of voltage for case 4.
4 Conclusion
In the future, active distribution network and microgrids with high amount of RES generation will not be possible without storage systems. Most often used storage technology on the low and medium voltage is battery storage. Battery storage is connected to the grid with the bidirectional converter with ability of control flow and amount of energy between battery storage and the grid. In this paper, BESS with ability of active and reactive power control is simulated using Typhoon HIL software.
According to the simulation results, impact of the connecting battery storage on the grid frequency and the voltage can be seen. Connecting battery storage causes slightly lower frequency than without battery storage and leads to frequency oscillating for 0.001 to 0.002 Hz. Reason for that is the output power of battery storage which is not constant because battery current is calculated for every simulation step. Changing of battery current in every step lead to output power changes whole time of simulation.
Voltage is slightly higher with battery storage than without battery storage in all four scenarios. Impact of the battery storage on the grid voltage is not significant and the highest voltage increase is visible in case 3 where the voltage with connected battery storage is for 0.3 V higher than without battery storage. In case 3, without battery storage, the voltage drop is from 399.67 V to 399.33 V and with the connected battery storage, the voltage drop is from 399.86 V to 399.73 V. In case 4, without battery storage, the voltage is raised from 399.67 V to 400.00 V and with the connected battery storage, the voltage is raised from 399.86 V to 400.03 V.
It can be concluded that battery storage systems have not significant impact on the frequency and voltage in this case because of the strong distribution grids. In the weak distribution grids and microgrids, where the load amount changes affect grid voltage and frequency, battery storage systems can lead to significant voltage and frequency improvements. In the microgrids and weak distribution grids, battery storage systems have ability to regulate grid voltage with possibility of reactive power regulation. In the strong distribution grids, transformer voltage tap and capacitor banks have more significant impact on grid voltage than BES. Installation and maintenance costs of BES is much higher than costs of capacitor banks and transformer voltage tap which is one additional reason for not using BES for voltage regulation.
References
Indu, V., Bindumol, I.K.: A hybrid photovoltaic and battery energy storage system with P-Q and V-f control strategies in microgrid. In: Proceedings of 2015 International Conference on Power, Instrumentation, Control and Computing (PICC). pp. 1–6. IEEE, Thrissur, India (2015). https://doi.org/10.1109/PICC.2015.7455747
Adhikari, S., Li, F.: Coordinated V-f and P-Q control of solar photovoltaic generators with MPPT and battery storage in microgrids. IEEE Trans. Smart Grid 5(3), 1270–1281 (2014). https://doi.org/10.1109/TSG.2014.2301157
Giannoutsos, S.V., Manias, S.N.: A cascade control scheme for a grid connected Battery Energy Storage System (BESS). In: Proceedings of 2012 IEEE International Energy Conference and Exhibition (ENERGYCON), pp. 469–474. IEEE, Florence, Italy (2012). https://doi.org/10.1109/EnergyCon.2012.6348200
Nayak, P., Patel, T., Munda, N., Mallick, R.K.: Optimal P-Q control of solar photovoltaic based microgrids with battery storage. In: Proceedings of 2019 Innovations in Power and Advanced Computing Technologies (i-PACT), pp. 1–6. IEEE, Vellore, India (2019). https://doi.org/10.1109/i-PACT44901.2019.8959518
Gira, N., Dahiya, A.K.: Solar PV-BES in distribution system with novel technique for DC voltage regulation. Eng. Sci. Technol. Int. J. 23(5), 1058–1067 (2020). https://doi.org/10.1016/j.jestch.2020.01.004
Chakir, A., et al.: Optimal energy management for a grid connected PV-battery system. Energy Rep. 6(3), 218–231 (2019). https://doi.org/10.1016/j.egyr.2019.10.040
Rezvani, A., Khalili, A., Mazareie, A., Gandomkar, M.: Modeling, control, and simulation of grid connected intelligent hybrid battery/photovoltaic system using new hybrid fuzzy-neural method. ISA Trans. 63, 448–460 (2016). https://doi.org/10.1016/j.isatra.2016.02.013
Nath, S., Wu, J.: Online battery scheduling for grid-connected photo-voltaic systems. J. Energy Storage 31 (2020). https://doi.org/10.1016/j.est.2020.101713
Rouco, L., Sigrist, L.: Active and reactive power control of battery energy storage systems in weak grids. In: Proceedings of 2013 IREP Symposium Bulk Power System Dynamics and Control - IX Optimization, Security and Control of the Emerging Power Grid, pp. 1–7. IEEE, Rethymno, Greece (2013). https://doi.org/10.1109/IREP.2013.6629422
Zhang, W., Xu, D., Lou, X., Yan, W., Yang, W.: Power management of battery energy storage system using model free adaptive control. In: Proceedings of 2018 IEEE 7th Data Driven Control and Learning Systems Conference (DDCLS), pp. 798–801. IEEE, Enshi, China (2018). https://doi.org/10.1109/DDCLS.2018.8516079
Lawder, B.M.T., et al.: System (BESS ) and Battery Management System (BMS ) for grid-scale applications. Proc. IEEE 102(6), 1014–1030 (2014)
Gundogdu, B., Gladwin, D.T.: Bi-directional power control of grid-tied battery energy storage system operating in frequency regulation. In: Proceedings of 2018 International Electrical Engineering Congress (iEECON). IEEE, Krabi, Thailand (2018). https://doi.org/10.1109/IEECON.2018.8712259
Sagara, M., Sediqi, M.M., Senjyu, T., Danish, M.S.S., Funabashi, T.: Voltage stability improvement by optimal active power and reactive power output control of storage battery system. In: Proceedings of 2016 IEEE Region 10 Conference (TENCON), pp. 2671–2674. IEEE, Singapore (2016). https://doi.org/10.1109/TENCON.2016.7848523
Wang, W., He, W., Cheng, J., Huang, X., Liu, H.: Active and reactive power coordinated control strategy of battery energy storage system in active distribution network. In: Proceedings of 2017 32nd Youth Academic Annual Conference of Chinese Association of Automation (YAC), pp. 462–465. IEEE, Hefei, China (2017). https://doi.org/10.1109/YAC.2017.7967453
Behera, M.P., Ray, P.K., Beng, G.H.: Single-phase grid-tied photovoltaic inverter to control active and reactive power with battery energy storage device. In: Proceedings of 2016 IEEE Region 10 Conference (TENCON), pp. 1900–1904. IEEE, Singapore (2017). https://doi.org/10.1109/TENCON.2016.7848352
Jana, A., Gayen, P.K., Dhara, P.K., Garai, R.: Simultaneous active and reactive power control of single-phase grid connected battery storage system. In: Proceedings of 2017 Devices for Integrated Circuit (DevIC), pp. 289–293. IEEE, Kalyani, India (2017). https://doi.org/10.1109/DEVIC.2017.8073954
Acknowledgement
This work was funded by the European Union through the European Regional Development Fund’s Operational Programme Competitiveness and Cohesion under project KK.01.1.1.04.0034 Connected Stationary Battery Energy Storage.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Šimić, Z., Bilandžić, J., Topić, D., Damjanović, A. (2022). Simulation of the Grid Connected Battery Storage with Ability of Active and Reactive Power Control. In: Glavaš, H., Hadzima-Nyarko, M., Karakašić, M., Ademović, N., Avdaković, S. (eds) 30th International Conference on Organization and Technology of Maintenance (OTO 2021). OTO 2021. Lecture Notes in Networks and Systems, vol 369. Springer, Cham. https://doi.org/10.1007/978-3-030-92851-3_14
Download citation
DOI: https://doi.org/10.1007/978-3-030-92851-3_14
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-92850-6
Online ISBN: 978-3-030-92851-3
eBook Packages: EngineeringEngineering (R0)