
Abstract
In recent years, sensor networks have grown exponentially and they are used in many fields of applications such as the monitoring of environment parameters, intelligent agriculture, surveillance of area, smart city, monitoring biological parameters of patients, etc. A Wireless Sensor Network (WSN) is a set of sensors deployed over a geographical area so that each node can collect data from the environment, do local processing and transmit them to a sink node or base station using multipath routing. An optimal deployment of sensors in the area of interest is required for the network to be efficient. So a good deployment can ensure a good coverage of the area, a better network connectivity and also an energy saving. In the literature several methods for deploying sensors are proposed. In this paper, we work on strategies based on the grid. We propose to divide the area into a square-octagonal pattern. The pattern consists of a square polygon and two octagon polygons. Based on our method, we evaluate the number of sensors used for the deployment of the sensors network, the percentage of coverage obtained, and then we make comparisons with other proposals in the literature. The obtained results showed that our proposal enable to ensure \(91.03 \%\) of the coverage area compared to other strategies of sensors deployment.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Wireless sensor networks are an emerging technology that is becoming increasingly popular in both the civilian and military domains. A WSN allows sensors to detect information (such as temperature or pressure) about the environment in which they are deployed, and then send it to collection points, called “base stations”. This is how WSN are used in several domains such as environmental monitoring, intelligent transportation, building, patient monitoring, agriculture, etc. In many applications, the deployment of sensors is done without prior planning. However, an optimal deployment of sensors in the area of interest is necessary for the network to be effective. Thus, a good deployment can provide good coverage of the area, better connectivity of the network and also energy savings. It is in this context that we will conduct our studies to ensure a very good coverage with an optimal number of sensors. In the literature, several sensor deployment methods have proposed. In this paper, we work on a grid-based strategy. It consists in dividing the area into a square-octagonal pattern. The pattern consists of one square polygon and two octagonal polygons. Based on our method, we evaluate the number of sensors used for the deployment, the percentage of coverage obtained, and then we compare it with other approaches in the literature presented in Table 4 of Sect. 3 and Fig. 9 of Sect. 4.
The rest of this paper is structured as follows. Section 2 gives some related works on the basic concepts of coverage and connectivity in a sensor network. Sections 3 we present in detail the new WSN deployment technique based on a square-octagon pattern to Optimizes the Covered Area. Section 4 evaluates the approach. We evaluate the coverage efficiency (%) obtained by our deployment pattern to provide partial area coverage with n-sided polygon models. We also compare for each pattern of deployment, the ratio between the sensing radius and the communication radius. Some concluding remarks and future work are given in Sect. 5.
2 Related Works
Recently, many researchers have studied sensor deployment techniques in WSN. Authors in [1,2,3,4,5,6,7] have worked on the basic concepts of coverage and connectivity in a sensor network. In the following, we show the different types of sensor deployments in sensors network.
2.1 Sensors Classification
A WSN consists of a set of nodes which can be deployed randomly or deterministically over a given interest area. Each sensor node has a coverage radius, a communication radius, an energy that represents its lifetime. Sensors can also be differentiated by their mobility. We have two types of sensors according to this criterion: fixed sensors and mobile sensors. In [2], the author compares these two types of sensors in terms of energy consumption and they conclude that mobile sensors consume more energy than fixed ones. Indeed, the movement of a sensor can have a direct effect on the efficiency of the coverage area. On the other hand, the author in [8] shows that mobile nodes allow closing holes in the network.
2.2 Types of Coverage in WSN
Coverage is an important performance metric in WSN, which reflects how well a sensing field is monitored. Its purpose is to collect good information of the area of interest [8]. Depending on the position of the sensors, we can have several types of coverage [1, 9] such as barrier coverage, point coverage and area coverage.
-
Barrier coverage: In this case, the objective is to achieve an arrangement of sensors with the task of maximizing the detection probability of a specific target penetration through the barrier.
-
Point coverage: The goal of this technique is to cover a set of points (target) with known positions that need to be monitored. This coverage scheme focuses on determining the exact positions of sensor nodes while guaranteeing and efficient coverage for a limited number of immobile targets. Depending on the mobility of the points, we have two types of coverage: fixed points and mobile points.
-
Area coverage: The main objective is to cover (monitor) a region and to maximize the detection rate of a specific area.
In the following, we define analytically the point coverage and the area coverage techniques. Let \( M=\{S1,S2,...,Sn\} \) be a set of sensors nodes and A denoted of a given area. On the other hand, let \(r_s\) represent the sensing range of a sensor node in the WSN. In this case, a sensor \(Si \in M \) cover a point \(q \in A\) if and only if: \(d(Si, q) \le r_s\). While d(Si, q) represent the Euclidean distance between the sensor node Si and the point q. The coverage of area by a sensor \(Si \in M\), denoted by C(Si), is defined by:
Finally, the area coverage by a set of sensors \(Mn=\{S1, S2,...,Sn\}\), denoted by C(Mn) is defined by:
In this paper, we focus on the area coverage technique. Most of the previous studies on this problem have focused on how to reduce the number of sensors to cover an area. In our case, we try to maximize the coverage of an area with a given number of sensors having the same characteristics.
2.3 Types of WSN Deployment
In order to ensure a good coverage of an area together with a network connectivity in the WSN, it is important to study and take into consideration the existing sensors deployment strategies. There are two types of sensor deployment techniques: random and deterministic [8, 9]. For the first case, it consists in knowing the exact position of the sensor before its deployment, contrary to the second deployment technique. Otherwise, sensor deployment strategies depend on the applications. Some sensor network applications require a full-area coverage of the region and others require a partial or a target coverage. For example, critical area monitoring and smart agriculture requires full coverage of the area.
2.4 Sensors Deployment Algorithm in WSN
Deployment can be uniform or non-uniform in a network architecture that can be centralized or distributed.
Deployment by the Meta-heuristic Method: In [7], the authors proposed a random sensor deployment with a meta-heuristic approach. The sensors are dynamic over time to ensure robustness of the network in terms of coverage. To achieve this objective, each sensor is programmed to participate dynamically on the performance of the network. The data fusion technique is used through clusters. Sensor deployment can also be done using a small aircraft. In [7], the deployment takes three phases: the predeployment, the postdeployment and the redeployment. The authors have applied their approach to different cases: area coverage, barrier coverage and point coverage. For a better efficiency of the heuristic method in relation to the virtual forces, a genetic algorithm is presented in [9]. Here, the authors show that the heuristic method is more efficient in terms of coverage and the number of used sensors.
Virtual Force Algorithms: This algorithm uses a simple deployment. Between two sensors, a force is exerted on one according to its distance from its neighbor and a fixed threshold. In [1], the authors explain in detail the execution of the different virtual forces as follows.
-
If the distance between two sensors is less than the threshold, they exert a repulsive force on each other.
-
If the distance between two sensors is greater than the threshold, they exert an attractive force on each other.
-
If the distance between the two sensors is equal to set threshold, they exert a zero force on each other.
Figure 1 gives the three types of forces where the radius of the circle represents the threshold value.

Virtual forces [3]
In [3], the authors proposed an algorithm to follow a moving object with virtual forces. They have developed a probabilistic approach based on the information collected by a group of sensors deployed to monitor a moving object.
Strip Deployment Algorithm: In a given area, the sensors can be deployed either in a single horizontal strip or in two strips. It consists of placing a set of sensors in a plane where the distances between them are denoted by \(d_\alpha \) and \(d_\beta \) as shown by Fig. 2. The columns are deployed either from left to right or from the other side. In [8], the authors make a physical deployment of the sensors in horizontal stripes and then they treat the notion of cooperative communication between them. In the study presented in [8] and [9], each sensor in the horizontal band carries a crucial information in order to ensure the coverage of the network. Then the authors make a comparison between the physical and information coverage of an area.

Strip deployment in [8].
Computational Geometry Based Strategy: The geometric strategies are based on objects such as points, segments, lines, polygons, etc. According to [1] and [8], the two most used methods in WSN are the Voronoi diagram and the Delaunay triangle which are based on irregular patterns as shown by Fig. 3.

Computational geometry based strategy in [1]
Grid-Based Strategy: The grid-based strategy ensures a deterministic deployment. In this type of deployment, the sensor position is fixed according to a chosen grid pattern. In [10], the grids or blocks can be all identical regular polygons placed side by side or grids which can be regular and nonidentical polygons placed side by side. Many works have focused on the study of grids for an optimal deployment of sensors. Among them, we have:
-
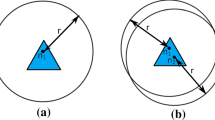
Triangular Grid: The zigzag-shaped sensor deployment is presented in [11] with a distance of \(\sqrt{3}r_s\) (where \(r_s\) is sensing range of a sensor) between two adjacent nodes over an angle of 60\(^{\circ }\). The author provides an algorithm that ensures 91% complete coverage and 9% redundancies. In [1] it has been shown that the equilateral triangle is the polygon with side equal to 3 provides maximum coverage in terms of area. Then, to have an optimal percentage of coverage, an area must be divided into a grid in the form of equilateral triangles.
-
Square Grid: The author of [12] cuts his work area into square grids for the deployment of his sensor nodes. Two algorithms have been proposed:
- \(\bullet \):
-
Algorithm Version 1: It consists in dividing the area into rows and columns. A first group of sensors are deployed on the rows and columns without overlapping and the distance between two adjacent nodes is \(2r_s\). A second group of sensors are placed on intersections that are not covered by the first group of sensors, at this level the distance between two neighbors is \(0.7r_s\). This version of algorithm gives a coverage percentage of 78% of the area.
- \(\bullet \):
-
Algorithm Version 2: It consists in dividing the area into rows and columns. The sensors are deployed on the rows and columns with overlapping. The distance between two nodes is \(0.7r_s\) along the vertical axis and also along the horizontal axis. This version of algorithm gives a coverage percentage of 73% of the area.
-
Hexagonal grid: This model consists in dividing the area into cells of hexagonal shape. This model has been presented in [13] with a distance between sensors of \(d \le \sqrt{3}r_s\).
In [14], the authors compare different uniform and identical grid-shaped deployments and concludes that the hexagon provides better performance in terms of percentage of network coverage.
We conclude this section by two comparative tables:
-
Table 1 summarizes the state of the art. It presents all the approaches that have worked on the deployment of sensor networks with the different techniques used by each author.
-
Table 2 has been presented by Mahfoudh in [1] and shows the coverage and the connectivity requirements of WSN applications. Thus, to ensure the collection and monitoring of climate data, we choose to deploy on a partial coverage \({\le }80\%\) based on a grid algorithm. The cutting pattern of our algorithm is the square-octagon (two octagons and one square).
3 Approach
In this section, we will present in detail our approach.
3.1 Preliminaries
Some useful preliminary parameters and notations related to a polygon (example Fig. 4) are presented below:

Polygon of n sides (n = 6)
-
We denote by Q(n, a) a polygon of n sides of length a each.
-
The perimeter of Q(n, a) is P(Q(n, a)) and its area is A(Q(n, a)). We simply write P and A when Q(n, a) is clear from the context.
-
We denote by \(r_i\) the measure of the apothem (the radius of the biggest inscribed circle) and at the same time \(r_i\) is the sensing radius of the sensor (\(r_s\)).
-
We use \(r_c\) to denote the radius of the circumscribed circle and at the same time \(r_c\) is the communication radius of the sensor.
The following equations give the relationship between the different parameters of a polygon.
In the harmony of the world of KEPLER in 1619, the way in which an area is divided is called paving. It is shown in [10] that there are two ways of dividing an area to reach a paving. Either one can divide the zone into identical convex regular polygons with a common vertex P and whose sum of their angles at this point P is 360\(^{\circ }\) which is the regular paving, or into a convex regular polygon and not identical (called a semi-regular paving).
We propose to use the grid-based algorithm with the principle of semi-regular paving. Firstly, we calculate the area of the zone and then depending on the communication radius and the catchment radius, we set the size of each dimension of our grid pattern. Secondly, the area of interest will be divided into two octagons and one square, then we place on the center of each octagon of our pattern an \(r_c\) communication beam sensor. Finally, we are going to look for the number of sensors that will be used and the percentage coverage of the area.
3.2 Hypothesis
The following assumptions are used by the approach proposed in this paper:
-
Each sensor is omnidirectional, and covers an angle of 360\(^{\circ }\);
-
Each node is considered as a disk with communication radius \( r_c\) and sensing radius \(r_s\);
-
All cutting work is based on the 2-dimensional space;
-
Each pattern may have one or more polygons consisting of n dimensions of size a;
-
The \(r_c\) of the sensor is equivalent to the radius of the circle circumscribed to the polygon;
-
The \(r_s\) of the sensor is equivalent to the radius of the circle inscribed at the polygon.
3.3 Objectives
The main goal of this approach is to ensure an optimized coverage of the city of Bambey and the Ferlo area in Senegal based on a new technology of sensor network deployment. This technique is based on a cutting of the area in a square-octagon pattern in order to optimize the number of sensors for a better coverage and to ensure connectivity and robustness of the network. Thus to achieve this objective we need to achieve a set of well defined sub-objectives:
-
1.
Optimal number of sensors;
-
2.
Better coverage percentage;
-
3.
Better sensor locations and
-
4.
Network connectivity and robustness.
The following table clearly shows our different working criteria set to reach our goal. On a set of approaches, we are going to compare the coverage efficiency, the cost of the installation, the energy used by a node, the distance between two nodes and also the mobility of the sensors between different patterns. The number of sensors is expressed as a function of \(r_c\). It is equal to \(A_z\) (the area of the total zone) divided by the \(A_c\) (area of a cell) expressed as a function of \(r_c\). The distance d between two nodes is equal to twice the coverage radius which is also equal to twice the radius of the circle inscribed to the cell.
Table 3 compares the coverage efficiency, the cost of the installation, the energy used by a node, the distance between two nodes and also the mobility of the sensors between different patterns.
The value of \(d_1\) gives the distance between two nodes along the horizontal axis and \(d_2\) is the distance between two nodes along the vertical axis.
3.4 Algorithm
The proposed approach consists in dividing an area into a pattern containing two octagons and a square each (sometime denoted by \(8^24\)). The size of each side is a as shown by Fig. 5.

Pattern of 2 octagons and 1 square
Patterns are connected to each others as shown in Fig. 6.

Pattern connection
Once the complete zone is covered by patterns, it looks as shown by Fig. 7. After that sensors are positioned in the center of octagons and labeled as following:
-
The BS station is center of the zone, denoted by label 0.
-
Sensors having label \(i+1\), are those having a distance \(2*r_c\) from a sensor having a label i.

Zone covering and sensor placement
For the sake of simplicity, we assume that area is a rectangle with a length l and width w. The center of the area will be as the position (0, 0) used as the origin of our repair. Algorithm 1 gives the positions of sensors and their labels. Positions will be returned in table called Positions where Positions[i, j] gives \(x_i\) (abscissa of the i-th sensor to the right if \(i>0\), to the left if \(i<0\)), \(y_j\) (ordinate of j-th sensor up if \(j>0\) and down if \(j<0\)) and \(h_{i,j}\) (the label that reflects the number of hops to reach the BS). At position (0, 0) we have the BS.

The following lines comment line by line the algorithm
-
line 1: initialization of variables;
-
line 2: calculate the value a as a function of the communication radius \(r_c\) of the size of the side of a polygon of size 8 sides;
-
line 3: calculate the area of the working area in rectangle is equal to length l multiplied by the argeur w;
-
line 4: calculate the area of the octagon as a function of a the size of a side. The octagon is a polygon of 8 sides n = 8;
-
line 5: calculate the area of the square with side a. The square is a polygon with four sides n = 4;
-
line 6: calculate the area of the pattern made of two octagons of a square;
-
line 7: calculates the number of patterns that can be cut out of the area of interest by dividing the area of the area by the area of a pattern;
-
line 8: calculates the number of sensors in the area of interest by multiplying the number of patterns by two. For each pattern we can place two sensors the center of each octagon;
-
line 9: gives us the position of the base station in our frame. The base station is in the center of the frame at position (0,0) and its position in the area of interest is (length /2, width/2) \((x_{bs}=\frac{l}{2},y_{bs}=\frac{w}{2},0)\);
-
line 10: the index i represents the x-axis of a sensor. i traverses the area of interest from 0 to (\(length/2r_c \)) \((\frac{l}{2*r_c})\);
-
line 11: the index j represents the y-axis of a sensor. j traverses the area of interest from 1 to (\(width/2r_c \)) \((\frac{w}{2*r_c})\);
-
line 12: represents the position (i, j) of a sensor;
-
line 13: represents the position \((i,-j)\) of a sensor;
-
line 14: represents the position \((-i,j)\) of a sensor;
-
line 15: represents the position \((-i,-j)\) of a sensor;
-
line 16: the end of the loop for with index i;
-
line 17: the end of the loop for with index j.
here is an example of application of the algorithm:
The surface of the working area is 500 m\(^2 \) with length 25 m and width 20 m and the communication radius of the sensors is 4 m.

Table 4 gives the results obtained by applying Algorithm 1 on an area of size 500 m\(^2\) and with a radius of 4 m. The result is compared to other polygon pattern of dimension n.
4 Evaluation and Performance
In this section, we evaluate the coverage efficiency \((\%)\) obtained by our deployment pattern to provide partial area coverage with n-sided polygon models. We also compare for each pattern of deployment, the ratio between the sensing radius and the communication radius. The ratio between the coverage radius and the communication radius allows us to know the predefined redundancy capacity of the network. The lower this ratio is, the lower the redundant zones are and the more the ratio tends towards zero, the more the redundancy increase as it is shown in Table 5.
Figures 8 and 9 show respectively the number of sensors required for an area of size 500 m\(^2\), and the percentage of coverage obtained by our deployment pattern compared to others (triangle, square, hexagon).

Number of sensors required depending on the pattern of deployment
As shown in Fig. 8, the number of sensors required to cover an area of size 500 m\(^2\) is much lower with the 1Square-2octagon pattern compared to the hexagon, square and triangle. As illustrated in Fig. 8, our deployment pattern allows to decrease the number of sensors, which optimizes the cost.

Percentage of coverage
In Fig. 9, we compare areas of identical size that are partitioned into triangles, squares, hexagons and our pattern (1square-2octagon). We find that our pattern has a better percentage of coverage compared to other patterns. The working area is 500 m\(^2\) and the radius used to calculate the results is \(4\,\mathrm{m}\).
5 Conclusion
This paper proposes a new algorithm for sensor deployment that minimizes the number of sensors and significantly improves surface coverage in WSN. Additionally, we investigated other grid-based deployment models such as triangles, squares, and hexagons. The comparisons of our pattern with those of the literature allowed to conclude that our algorithm gives better performances in terms of coverage area and number of sensors required to cover a given region.
As future work, we intend to use our pattern deployment in the areas of Bambey and Ferlo in Senegal for the implementation of an application for the collection, the processing and the transmission of climatic data in real time using sensor networks.
References
Mahfoudh, S., Minet, P., Laouiti, A., Khoufi, I.: Survey of deployment algorithms in wireless sensor networks: coverage and connectivity issues and challenges. IJAACS 10(4), 341 (2017)
Bomgni, A.B., Mdemaya, G.B.J.: A2CDC: area coverage, connectivity and data collection in wireless sensor networks. NPA 10(4), 20 (2019)
Zou, Y., hakrabarty, K.: Sensor deployment and target localization based on virtual forces. In: IEEE INFOCOM 2003. Twenty-second Annual Joint Conference of the IEEE Computer and Communications Societies (IEEE Cat. No.03CH37428), San Francisco, CA, vol. 2, pp. 1293–1303. IEEE (2003)
Liu, Y.: A virtual square grid-based coverage algorithm of redundant node for wireless sensor network. J. Netw. Comput. Appl. 7 (2013)
Liao, C., Tesfa, T., Duan, Z., Ruby Leung, L.: Watershed delineation on a hexagonal mesh grid. Environ. Model. Softw. 128, 104702 (2020)
Firoozbahramy, M., Rahmani, A.M.: Suitable node deployment based on geometric patterns considering fault tolerance in wireless sensor networks. IJCA 60(7), 49–56 (2012)
Mnasri, S., Nasri, N., Val, T.: The deployment in the wireless sensor networks: methodologies, recent works and applications. In: Conference Proceedings, p. 9 (2014)
Cheng, W., Lu, X., Li, Y., Wang, H., Zhong, L.: Strip-based deployment with cooperative communication to achieve connectivity and information coverage in wireless sensor networks. Int. J. Distrib. Sens. Netw. 15(10) (2019)
Farsi, M., Elhosseini, M.A., Badawy, M., Ali, H.A., Eldin, H.Z.: Deployment techniques in wireless sensor networks, coverage and connectivity. IEEE Access 7, 28940–28954 (2019)
Salon, O.: Quelles tuiles ! (Pavages apériodiques du plan et automates bidimensionnels). Journal de Théorie des Nombres de Bordeaux 1(1), 1–26 (1989)
Hawbani, A., Wang, X.: Zigzag coverage scheme algorithm & analysis for wireless sensor networks. Netw. Protoc. Algorithms 5, 19–38 (2013)
Hawbani, A., Wang, X., Husaini, N., Karmoshi, S.: Grid coverage algorithm & analysis for wireless sensor networks. Netw. Protoc. Algorithms 6, 1–19 (2014)
Alexander, T.: La créativité et le génie ne peuvent s’épanouir que dans un milieu qui respecte l’individu et célèbre la diversité. p. 8
Senouci, M.R., Mellouk, A.: A robust uncertainty-aware cluster-based deployment approach for WSNs: coverage, connectivity, and lifespan. J. Netw. Comput. Appl. 146, 102414 (2019)
Loscri, V., Natalizio, E., Guerriero, F., Mitton, N.: Efficient coverage for grid-based mobile wireless sensor networks. In: Proceedings of the 11th ACM symposium on Performance evaluation of wireless ad hoc, sensor, & ubiquitous networks - PE-WASUN 2014, Montreal, QC, Canada, pp. 53–60 ACM Press (2014)
Sharma, V., Patel, R.B., Bhadauria, H.S., Prasad, D.: Deployment schemes in wireless sensor network to achieve blanket coverage in large-scale open area: a review. Egypt. Inf. J. 17(1), 45–56 (2016)
Iliodromitis, A., Pantazis, G., Vescoukis, V.: 2D wireless sensor network deployment based on Centroidal Voronoi Tessellation. p. 020009, Rome, Italy (2017)
Cheng, W., Li, Y., Jiang, Y., Yin, X.: Regular deployment of wireless sensors to achieve connectivity and information coverage. Sensors 16(8), 1270 (2016)
Bomgni, A.B., Brel, G., Mdemaya, J.: An energy-efficient protocol based on semi-random deployment algorithm in wireless sensors networks. Int. J. Netw. Secur. 22, 602–609 (2020)
Boukerche, A., Sun, P.: Connectivity and coverage based protocols for wireless sensor networks. Ad Hoc Netw. 80, 54–69 (2018)
Li, R., Liu, X., Xie, W., Huang, N.: Deployment-based lifetime optimization model for homogeneous wireless sensor network under retransmission. Sensors 14, 23697–23723 (2014)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 ICST Institute for Computer Sciences, Social Informatics and Telecommunications Engineering
About this paper

Cite this paper
Lecor, A., Ngom, D., Mejri, M., Mbodji, S. (2021). A New Strategy for Deploying a Wireless Sensor Network Based on a Square-Octagon Pattern to Optimizes the Covered Area. In: Faye, Y., Gueye, A., Gueye, B., Diongue, D., Nguer, E.H.M., Ba, M. (eds) Research in Computer Science and Its Applications. CNRIA 2021. Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering, vol 400. Springer, Cham. https://doi.org/10.1007/978-3-030-90556-9_6
Download citation
DOI: https://doi.org/10.1007/978-3-030-90556-9_6
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-90555-2
Online ISBN: 978-3-030-90556-9
eBook Packages: Computer ScienceComputer Science (R0)