
Abstract
Energy from the ocean is one of the least exploited renewable and sustainable energy sources, and possesses an enormous amount of untapped energy. The harnessing of energy from the ocean can be accomplished by several methods such as salinity and temperature gradient, waves, currents, and tidal variations. Amidst all, the ocean waves are a highly promising form of energy. Ocean waves have a tremendous amount of energy that can be harvested to meet the increasing energy demand. There are several challenges in wave energy conversion, which include the corrosive environment, the constraints of the converters, untuned device performance for the incoming waves, and irregularities in waves and air velocity. These challenges affect the overall system performance and decrease the overall conversion efficiency. The solution for many of these problems is to tune the device according to the wave climate and a controlled operation of the system. As waves differ in height and period, an optimal control method can help improve the efficiency, performance, and power absorption of a wave energy converter (WEC). This chapter presents a review of various control schemes applied to wave energy devices to achieve higher efficiency. The actual efficiency of WEC in real-time is very less compared to theoretical efficiency which is obtained around 70–80%. This large efficiency gap is due to various stages involved in the wave energy conversion process. To achieve good overall efficiency an optimal design and control techniques need to be applied at different stages of WEC.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

16.1 Introduction
The ocean waves are formed by the wind blowing over the surface of the ocean. These waves contain an enormous source of energy. Compared to the other renewable energy resources, the ocean waves have the highest energy density [1]. Approximately the entire ocean can generate an energy of about 8000–80,000 TW/year, i.e. a single wave crest holds an power of approximately 10–50 kW/m [2]. These waves generate power constantly around the clock. The power generated by the waves provides a good balance between supply and demand. The energy generated from waves around the world is predicted nearly 1 TW or more [3]. A foremost part of the solution to the global energy emergency can be met by harnessing the enormous power of the waves.
Even though the waves contain this enormous power, the wave energy devices fit in the lower level of the technology readiness diagram [4, 5]. The main reason for this is that the wave energy device components do not operate and synchronize well in different wave climates. In recent years, a lot of attention is given to improve auxiliary subsystems such as gearing systems, control systems, electrical power take-off, power system protection, and grid connections of wave energy converte (WEC). An overall wave energy plant needs to be fully equipped with fault-tolerant devices for power system protection and the ability to withstand and counteract the unpredictable wave climate. The main issues in wave energy conversion include the harsh ocean environment, system limitations, mismatch of wave frequency to the resonant frequency, and irregular wave climates and air velocity. The solution for most of these problems is to control the process of the wave energy device. As waves fluctuate in height and period, a suitable control design would be able to improve the efficiency of a wave energy converter. There are several studies available on the application of control schemes on wave energy plants. The wave energy plant is dynamic in nature; it includes nonlinearities while operating. A control system must be designed such that it has a stable operation in all variable conditions. To extract maximum energy from waves, the hydrodynamic parameters or the device power take-off (PTO) must be tuned depending on the incoming waves. Various methods to control the operation of WECs are given below.
16.2 Control Techniques Applied to WECs
In recent years, a lot of importance is given to improve auxiliary subsystems such as gearing systems, control systems, electrical power take-off, power system protection, and grid connections of WEC. An overall wave energy plant needs to be fully equipped with fault-tolerant devices for power system protection and the ability to withstand and counteract the unpredictable wave phenomena. Challenges in wave energy conversion include the harsh ocean environment, system limitations, mismatch of wave frequency to the resonant frequency, and irregular wave climates and air velocity. Owing to all these difficulties, the complete device performance is drastically affected. The solution for many of these problems is to control the process of the wave energy device. An efficient control method can help tune the system corresponding to the input wave climate and improve the efficiency of a wave energy converter. There are several pieces of literature available on the application of control schemes on wave energy plants. The control strategies on WEC is broadly classified as:
-
1.
Control of WEC primary parameters
-
2.
Control of Secondary Converters.
16.2.1 Control of WEC Primary Parameters
The control system improves the cost-effectiveness of the WEC devices. The optimal hydrodynamic control increases energy production by a factor of 1.5–2.8 [6]. The control system adds an advantage in the reduction of initial cost due to the reduction in system dimensions for some specific amount of energy. Most of the WEC devices are based on relative oscillatory motion between two bodies or oscillating pressure distribution within a closed chamber. These oscillators have their resonance, which can be used to extract energy during certain wave conditions [7]. Due to the seasonal variation of wave spectra, the year-averaged efficiency of wave energy devices becomes very low. The solution to this problem is a proper selection of a control scheme. A control scheme can modify the dynamics of the device such that the efficiency of the WEC can be enhanced for a wide range of wave climates. Various kinds of active control mainly focus on structural control and control may be using passive loading, phase control by latching.
16.2.1.1 Passive Loading
To extract maximum energy from ocean waves, the device PTO has to be tuned depending on the incoming waves. Thus, control of the amplitude of the wave energy device motion is done with the help of tuning the damping of the device. Molinas et al. [8] developed a control scheme for primary conversion stages, which would increase the energy production of WEC. They developed a model using power electronic converters implemented on the power network. Passive loading refers to the implementation of a mechanism to alter dynamic resistance, and mechanical resistance experienced by the waves when they incident upon the device. Based on the wave time scale, this dynamic resistance may change constantly depending on the need. The load resistance is kept constant, provided by some machinery, which would maximize the converter energy. In this study, an oscillating water column (OWC) WEC system dynamic is studied, considering it as a cylinder with a hemispherical bottom subject to heave motion. Passive loading is a form of a linear control strategy, where the force exerted by the PTO is directly dependent on the velocity exerted by the air oscillation or the velocity of the buoy. In this method, the amplitude is only controlled, and no consideration is given to the phase. The comparison between passive loading with optimum control and its performance in irregular waves is done by Tedeschi et al. [9]. The peak power always doubles when passive loading is applied for sinusoidal wave conditions. The comparison of passive loading and optimal control shows that the maximum energy extraction is possible when the damping and the optimal loading are almost equal. Different passive loading schemes are classified in Table 16.1.
16.2.1.2 Amplitude and Phase Control
Optimum interaction between the WEC device and the incoming wave is achieved by controlling the velocity of the device. The purpose of control is to use the optimum phase and amplitude to extract maximum energy. The optimum phase is obtained when the oscillating system is in resonance with the incoming wave. Falnes [10] described a system with optimal phase control of OWC-WEC, which is done by increasing the oscillation to attain an optimal interaction between the plant and wave. Maximum power absorption in the OWC device takes place under two conditions: the oscillation velocity should be in phase with the excitation force, and the amplitude of the oscillation must be tuned to the optimum value. This means the absorbed power must be equal to the power radiated into the sea. Two types of control strategies were stated in the above work; the first control strategy is used to maximize the converter power based on the measurement of the input wave. The second one is the amplitude of the oscillation needs to be tuned to the optimum value. This means the absorbed power to be equal to the power reradiated into the sea. Nunes et al. [11] applied phase and amplitude control on OWC-WEC containing variable pitch Wells turbine. The study showed that the response of the system could exactly match a particular frequency of the incoming wave, which is different from the device’s natural frequency. A controller was developed to perform quality control, which could predict few more seconds into the future for a fixed time window and use the Fourier transform of the incoming wave inside the specific period to perform the spectral analysis. From the data of spectral analysis, a reference for the controller was constructed. The modeling of OWC-WEC in the above work did not consider the diffracted and radiated flow. However, for an OWC device exhibiting second order dynamic behavior, the optimal condition for energy extraction took place when the oscillating pressure inside the chamber and diffraction flow were in phase with each other. The excitation force is due to the action of water inside the chamber. To develop phase control on OWC-WEC, a Wells turbine with variable pitch was used in that work. As this turbine can act either as a compressor or as a turbine, there is a chance to control the pressure inside the chamber. The main factors behind implementing any control strategy are the quality of energy extracted and the cost of implementation. Any efficient control scheme must have a good correlation between these two factors.
16.2.1.3 Discrete Control
-
(a)
Latching control
Latching control is a phase control scheme that was developed in the early 1970s by Budal and Falnes [12], which was used to demonstrate the application of control systems for optimizing the motion of WEC, which was oscillatory. In this method, the velocity of the absorber is put on to be in phase with the excitation forces, which is done by clutching the WEC system at an upper and lower position. In other words, the adequate delay in the release of the device in order to bring it to operate in phase with the diffraction force would make the system operate in a near-optimal condition. Thus, latching control is a sub-optimal control strategy as the amplitude is made sub-optimal, however, the phase is forced to be in optimal range by resisting the moving part of the body constant for a certain duration of the wave cycle.
Evaluation of latching control for heave oscillations was done by Korde [13]. He implemented latching control of a floating WEC implemented in deep water. The evaluation was done with a variation formulation of the control sequence in the time domain. Latching is applied to a hemispherical platform from a stationary onboard platform. The equipment includes a pneumatic cylinder with open/ close valves for latching. This time-domain calculation is carried out for small-amplitude regular and irregular waves [14]. Babarit et al. [15] described a latching control with the help of weak modeling, which is used to apply optimal control theory. It involves the generation of parametric resonance in the response of the mechanical system. Two types of WECs were studied. One was a heaving buoy with one degree of freedom. Next was a four-degree freedom WEC called SEAREV [16]. Latching applied to the above said sub-optimal weak formulation in regular waves, which could also be used to get an optimally controlled WEC in the time domain in a random sea. The analysis made is the maximum benefit of latching control on WEC [17]. A Comparative study of latching control for heaving point absorber is done in reference [18] were two strategies aiming at maximizing the absorbed energy and keeping the velocity and excitation force in phase. The result shows that irrespective of the control strategy of the WEC, the efficiency improves with latching control.
-
(b)
Declutching control
Declutching or unlatching control, a dual latching control, involves the decoupling of the PTO. This infers that the PTO force is made equal to zero in the equation during certain portions of the power cycle. This type of control is mainly implemented in devices that have a longer natural period than the useful part of the spectrum. The primary moving part is permitted to adjust freely for half of the wave cycle, and the desired velocity PTO system is achieved. This method was listed in the paper [19], which showed that the correct PTO strategy can improve the power capture of wave plants from 12–15%. Unlatching is accomplished by bypassing the pumps at specified moments. These moments are established by the optimal command theory. Clement et al. [20] described discrete control strategy, which involved latching, unlatching, and combined latching-unlatching. Which showed that latching control needs mechanical breaks and locks, whereas declutching control needs simple elements such as valves in the case of hydraulic PTO and switches in the case of electrical PTO. Pico plant uses this method to prevent damage in the system, and SEAREV WEC uses it to increase energy production. Babarit et al. [15] described two control strategies such as pseudo- continuous control and declutching control shows the improvement of energy absorption with the implementation of the above-said methods.
16.2.1.4 Continuous Control: Reactive Control
The maximum energy from the WEC can be extracted when the amplitude and phase of the incident wave excite the resonant oscillations within the chamber. When the OWC is loaded, it can be expressed with a real part and an imaginary part. If at resonance, the real part equals the imaginary part of the resulting force from water column oscillation, 100% of the incident wave can be absorbed. However, when the load is applied to WEC, this load exhibits a reactive component, which is not equal to the resistive component. By controlling the resistive and reactive components, a maximum amount of energy extraction is possible. However, to achieve this maximum energy, optimum damping and resonance conditions should correlate with a particular wave period. Korde [21] has given a significant contribution to the reactive control of different wave energy devices. Reactive control is a frequency domain control used in the early days. The dynamic parameters such as spring coefficient and inertia of the WEC in primary conversion are mainly considered for control. Control is done to enable maximum energy absorption at a particular frequency. Korda’s work [6, 21] formulated that, for a particular wave frequency, the wave energy device is resonated with the help of feedback signals of the displacement and acceleration commands. At the same time, for a particular frequency, the damping coefficient of the PTO mechanism can be tuned to balance the radiation damping of the system using velocity feedback. This allows the hydro-dynamically maximum energy absorption and can be done at each peak frequencies of the incoming wave spectrum. In order to achieve reactive control, the force should be in phase with displacement and acceleration. Many devices exploit the resonance phenomena to achieve maximum power, such as OWC-WECs and point absorbers. The importance of frequency matching considering dynamic variables is explained by Andrade et al. [22]. In principle, reactive control can be achieved by reversing the oil flow during part of the wave cycle. However, numerical analysis in [23] showed that reactive control is hard to achieve by reversing the oil flow direction during part of the wave cycle.
16.2.1.5 Complex Conjugate Control
In a point absorber system, the mechanical resonance appears when the imaginary part of the total impedance sums up to zero. For such a device the maximum energy absorption takes place when the impedance of the PTO mechanism becomes equal to its complex conjugate [22]. When such a control scheme is applied, the maximum energy transfer depends on the upcoming buoy’s velocity values. This method is non-causal because it is needed to estimate an irregular wave for some instance into the future. Thus, the optimal PTO force cannot be implemented adequately in practice. To deal with non-causality, an approximate complex conjugate method is proposed. This involves causal functions in order to implement some alternative sub-optimal control strategies.
16.2.2 Airflow Control
A method to change the flow rate is by providing valves. There are two ways in which valves can be placed for an OWC duct, one is placing a bypass valve, and another method is to place a throttle valve. The enhancement of the OWC-WEC performance using bypass and throttle valve was studied by Falcão and Justino [24]. The study concluded that the use of a single or set of valves delayed the stall in the turbine and substantially increased the energy produced by the WEC, mainly during high wave incidence. The study also stated that the bypass valves have opted for a system where the turbine damping is much higher than the optimum damping, and throttle valves are mainly used for underdamped systems.
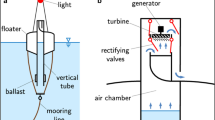
The performance of OWC-WEC coupled to a Wells turbine is significantly affected due to two reasons. Firstly, the unsteady bidirectional airflow across the turbine. The second reason is due to increasing the flow rate above critical limits. Due to these reasons, mechanical efficiency and power output drop rapidly. A method to change the flow rate is by providing valves (Fig. 16.1). There are two ways in which valves can be placed for an OWC duct, one is placing a bypass valve, and another method is to place a throttle valve. The next study using only bypass valves was given in the literature [25], where an increase in energy production was observed with the use of the valves. In the works of literature [26,27,28], the throttle valve is used in series with the device. A propotional integral derivative (PID) controller is used to control the position of the valve according to the incident wave along with the rotational speed control of the turbine. This complementary control action delayed the stall by altering the flow velocity across the turbine. However, their work used classical controllers, which are inefficient for robust tracking of the reference signals, and external disturbance rejection as the valve actuator is typically an uncertain system due to friction, external disturbances, and parametric uncertainties due to the cumbersome identification process. In the OWC device, the mass flow rate identification is a very tedious task. Thus, such systems have high parametric uncertainties, thus the conventional controller often fails to perform well.

Schematic of amplitude and phase control of OWC-WEC
Falcao et al. [24, 25] developed a model for efficiency improvement using a valve in series or parallel with the turbine shaft for airflow control the airflow. Numerical analysis shows that the turbine efficiency is particularly affected by two behaviors. Firstly, due to the unsteady flow of air displacement by free surface water oscillation. Secondly, due to the proportionality of airflow with turbine rotational speed. This model involves a throttle valve or bypass valve based on whether the WEC device is over-damped or under-damped by the turbine. The airflow control scheme also prevents losses due to aerodynamic stalls at the turbine rotor blade and prevents excessive air flow rate. This is of extreme importance when the performance of the turbine is greatly affected by rotor stalling. Study shows that throttle valve in series with the turbine is better compared to parallel mounted in enhancing the power and reduction of stalling.
16.2.3 Control of Secondary Converters
The control of the WEC device has to meet several criteria such as allowable speed range for optimal operation, the aerodynamic performance of the turbine, power quality, allowable fluctuation in power delivered to the grid, and efficiency of the wave to wire conversion. Control needs to be allied to various stages in order to obtain an efficient operation. Various control schemes applied to secondary are tabulated in Table 16.2.
16.2.3.1 Rotational Speed Control
Fixed rotational speed turbines are capable of operating only within a limited range of flow conditions around the best operating point. In particular, for the Well turbine during the low sea state, the power output is low were as during the most energetic sea state also its performance is poor which mainly due to aerodynamic losses. This loss is mainly caused by rotor stalling. Wells turbine operates only within a certain bandwidth. The restricted bandwidth is due to stalling. An efficient way to widen the response of the turbine is with the help of variable rotational speed. This enables the turbine to respond to a wide range of sea states. As the turbine flow rate is proportional to speed and power output is a proportional cube of speed. Thus, if the turbine speed is controlled, one can enhance the operation of the turbine by delaying the stall and maximizing the power absorption. The rotational speed should approximately match sea conditions. With just doubling the speed, the power output of the turbine is increased by 8 times; this increase of speed is done with the help of power electronic devices. The scheme of speed control was first addressed by Justino et al. [31] for the OWC plant. Their work considered three control strategies: (i) the electrical torque is controlled as a piecewise constant function of time. (ii) The electrical torque is controlled in such a way that differential torque is always a function of differential speed with respect to time. (iii) The electrical power is controlled as a continuous function of one or several state variables, as power is a function of pressure and speed. Voltage/frequency (V/F) control law is applied on stator and rotor as separate strategy and a comparison is made; his work shows that V/F control applied on the stator is optimal. There is always a trade-off between output power quality and the efficiency of a plant.
In the literature [32], a stochastic model was developed to design an optimal algorithm to control the turbine rotational speed of an OWC device coupled with the Wells turbine. The model is developed in the frequency domain with the assumption of known hydrodynamic coefficients and turbine performance curves. Linear control theory is applied on a random sea state, considering sea surface height as a normal probability density function. The relation between the instantaneous generator torque and rotational speed is considered for developing an optimal control law. Their work addresses several losses associated with a wave energy converting device, such as (i) viscous losses due to fluid effect; (ii) aerodynamic losses due to turbine stall; (iii) bearing frictional losses, and (iv) losses in the generator.
These losses can be minimized by successfully implementing control strategies to several stages of the plant. Stochastic modeling is mainly involved if the device is considering operating in random sea waves. The study concluded that a valve system for airflow control, when operated near-optimal point, could only increase the average power output by 3%. However, the control of rotational speed could increase the energy production by 20% to match the individual sea state.
Alberdi et al. [28] proposed a complementary control scheme in which both airflow and rotational speed are controlled. The rotational speed is adjusted instantaneously according to the slip of the generator in order to match the available sea state. The speed is regulated such that the stall region is avoided. This change of speed according to the input wave condition is done with the help of power electronic devices. A vector control scheme (field orientation control) is employed in such cases when alternating current (AC) machines are used in the systems. In this method, the three-phase current and voltage vectors are decoupled into two vector components each, one component is directly linked with the active power (a function of rotational speed), and the other is linked with the reactive power of the system. Thus, the systems can be controlled in terms of these vectors. The control block is modeled as a feed-forward controller where PI controllers are used for regulating the power output. It is observed that there is an improvement in the instantaneous power output, in particular, and there is a regulation of power quality. Portillo et al. [33] investigated the control problem on the OWC device, theoretically and experimentally. Their study was based on latching control and speed control of turbine using easily measurable variables by developing a causal control law. The rotational speed control was done using power and torque coefficients of the turbine to formulate a stochastic relationship to control the turbine and making it operates near the best operating point. This rotational scheme is also helpful in the case of an OWC device coupled with an impulse turbine. Even though this turbine is not affected by stalling and has a broad operating range compared to Wells turbine, there are certain losses due to an excessive incidence flow angle at the entry to the second row of guide vanes affecting the turbine performance. These losses are predominant during certain range of flow coefficient. Thus, by controlling the speed the turbine can be operated in the flow coefficient where the losses are minimum. The state of the art of the airflow control and rotational speed control is given in Table 16.3.
16.2.3.2 Direct Torque Control
Tedd et al. [44] modeled a direct torque control (DTC) technique for wave dragons. This device is a fully automated prototype that is deployed in Denmark. Wave dragon does not involve any active control to survive extreme sea conditions. The improvement in power absorption is greatly influenced by different control systems used in WEC. Control is split as slow, fast, and very fast. Very fast control ensures the turbine runs at the optimal speed, and the power quality is maintained good enough to deliver to the grid. Power electronics are used to give good performance and a stable system. Direct torque control is based on space vector modulation DTC- SVM as it is more advantageous than classical DTC. A review of various DTC for induction machines is given by Reza et al. [45]. This method combines DTC and FOC (field orientation control) for better operation. The proper implementation of torque controller is important concerning the power quality issue [46]. The DTC also ensures a power control for a wave energy device.
16.2.3.3 Power Quality Control
Considering the control of an electrical drive of WECs, there are two converters, namely rotor side converter, and grid side converter. The power control scheme helps in the protection of the rotor side converter to avoid overshoot in the rotor current. The power quality issues in the wave energy converter need to rectify with a significant minimal error to connect it to a grid. Power quality issues are the total harmonic distortion, peak overshoot, sag, swell, and low power factor. These issues need appropriate attention in order to meet the energy demand. Lagoon et al. [47] worked on a model-based predictive power control scheme to ensure the active and reactive power to attain their reference values, which is designed for doubly fed induction generator (DFIG) using stator flux decoupling and deadbeat control loop. The control action was implemented on a model to be controlled, depending on the optimal reference point. The predictive control scheme optimizes the cost function and formulates the future control action. The model is assumed to be linear, and its state-space equations are used to calculate its active and reactive powers. For this analysis, information regarding leakage induction and resistance is needed for this control scheme. The paper addresses various controllers which can be chosen for power control such as internal model controller, fuzzy logic controller, direct torque controller its advantage and disadvantage are discussed. The internal mode controller has a good power response compared to the PI controller, but it is difficult to employ due to the predictive functional controller and internal mode controller scheme. When considering fuzzy logic controller, it contains a relatively complex transformation of voltages, currents, and the control outputs between the stationary, rotor, and synchronous reference frames. In the indirect torque controller, the switching states are chosen from an optimal switching table depending on the instantaneous error between the reference and predicted values of active and reactive power and angular position. The study concluded that the control scheme had better tracking performances for DFIG. Other control problems that arise on the grid side of the wave energy converter are active and reactive power control, DC-link voltage control, injected power quality control, grid synchronization, voltage harmonic compensation, and fault handling.
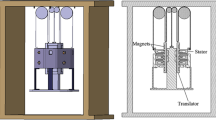
Xiang et al. [48] worked on developing power control for a direct drive wave energy converter. Power control stages require the following requirements: (i) Reactive power compensation in the active rectifier. Maximum energy transfer between the generator to the dc link is realized by means of a unity power factor controller, (ii) Regulation of the dc capacitor voltage, (iii) Current control of the inverter output current and consequently the inverter power into the power sink. Two control strategies addressed are frequency tuning control and unity power factor control. Both ensure a proper improvement in the power quality requirement of the grid. Garrido et al. [49] developed a control scheme for rotor side and grid side converter to control the power output of OWC coupled with a Wells turbine (Fig. 16.2). They used a sensor-less control scheme with an observer for induction rotor speed based on the disturbance model. For any given sea state, the control scheme could extract the maximum possible power using a point tracking technique. The performance curve is predefined for each turbine; the rotor speed is regulated so that the flow coefficient remains under desired bandwidth, resulting in a stall-free operation, yielding maximum power output.

Rotor side and grid side converter control of OWC-WEC
The performance of the OWC-WEC turbine can be significantly improved by the application of an appropriate control technique. The operating principle of OWC-WEC is typically different from other WECs, such as the point observers, AWS-WEC, overtopping devices. Thus, control strategies are also different for OWC based devices and have different control variables compared to other devices. For example, the reactive control variable for OWC-WEC is the air turbine blade angle. In the case of latching control, the control variable is the pressure inside the chamber; for airflow control, the valve area is altered, and for rotational speed control, the electromagnetic torque is controlled by appropriately switching the power converters.
16.2.3.4 Active Control of Turbine Blade Pitch or Geometry Control
The power extracted from the waves in the OWC device is limited mainly due to the stalling phenomena of the Wells turbine. In order to address this problem, a study was proposed to change the instantaneous angle of incidence of the turbine blade by controlling the blade pitch [30, 34]. However, this method faces technical difficulties, such as the implementation and maintenance of the actuators.
16.3 Conclusion
This chapter has summarized the recent research advances in control solutions applied to various wave energy converter technologies. Typical illustrations are addressed for OWC-WEC and AWS types of converters. With the increasing importance and complexity of energy systems, there is a need to focus much on the performance, scalability, reliability of the system. State-of-the-art gives good hope for developing wave energy converter technology. This chapter mainly insists on the importance of the involvement of each stage in energy conversion. Suitable selection of optimal control laws can significantly improve performance, efficiency, and power absorption. The complexity of the device is very high. Its survivability and cost are also a great concern for WEC developers. The initial installation is very high, but the potential of wave energy is very high compared to any other source. Thus, more focused research can give optimized devices that can adapt to the ever-changing wave energy source. There is very little literature on the role of energy storage in standalone power systems and complexity in grid connection. In these fields, future research can be improved to get a stabilized, better-performing wave energy plant.
References
Clément, A., McCullen, P., Falcão, A., Fiorentino, A., Gardner, F., Hammarlund, K., et al. (2002). Wave energy in Europe: Current status and perspectives. Renewable and Sustainable Energy Reviews, 6, 405–431. https://doi.org/10.1016/S1364-0321(02)00009-6
Sannasiraj, S. A., & Sundar, V. (2016). Assessment of wave energy potential and its harvesting approach along the Indian coast. Renewable Energy, 99, 398–409. https://doi.org/10.1016/j.renene.2016.07.017
Falnes, J. (2007). A review of wave-energy extraction. Marine Structures, 20, 185–201. https://doi.org/10.1016/j.marstruc.2007.09.001
Cruz, J. (2008). Ocean wave energy. Berlin, Heidelberg: Springer.
Masuda, Y. (1986). Hydrodynamics of ocean wave-energy utilization. Springer. https://doi.org/10.1007/978-3-642-82666-5
Korde, U. A. (2000). Control system applications in wave energy conversion. Proceedings Oceans, 3(2000), 1817–1824. https://doi.org/10.1109/OCEANS.2000.882202
Marsh, G. (2009). Maximising the power of waves. Renewable Energy Focus, 10, 80–84. https://doi.org/10.1016/S1755-0084(09)70242-X
Molinas, M., Skjervheim, O., Andreasen, P., Undeland, T., Hals, J., & Moan, T., et al. (2007). Power electronics as grid interface for actively controlled wave energy converters. In 2007 International Conference Clean Electrical Power, ICCEP ’07, 2007 (pp. 188–195). https://doi.org/10.1109/ICCEP.2007.384210
Tedeschi, E., Carraro, M., Molinas, M., & Mattavelli, P. (2011). Effect of control strategies and power take-off efficiency on the power capture from sea waves. IEEE Transactions on Energy Conversion, 26, 1088–1098. https://doi.org/10.1109/TEC.2011.2164798
Falcão, A. F. D. O. (2008). Phase control through load control of oscillating-body wave energy converters with hydraulic PTO system. Ocean Engineering, 35, 358–366. https://doi.org/10.1016/j.oceaneng.2007.10.005
Nunes, G., Valério, D., Beirão, P., Sá da Costa, J. (2011). Modelling and control of a wave energy converter. Renewable Energy, 36, 1913–1921. https://doi.org/10.1016/j.renene.2010.12.018
Tedeschi, E., & Molinas, M. (2012). Tunable control strategy for wave energy converters with limited power takeoff rating. IEEE Transactions on Industrial Electronics, 59, 3838–3846. https://doi.org/10.1109/TIE.2011.2181131
Korde, U. A. (1991). On the control of wave energy devices in multi-frequency waves. Applied Ocean Research, 13, 132–144. https://doi.org/10.1016/S0141-1187(05)80060-4
Korde, U. A. (2002). Latching control of deep water wave energy devices using an active reference. Ocean Engineering, 29, 1343–1355. https://doi.org/10.1016/S0029-8018(01)00093-2
Babarit, A., Guglielmi, M., & Clément, A. H. (2009). Declutching control of a wave energy converter. Ocean Engineering, 36, 1015–1024. https://doi.org/10.1016/j.oceaneng.2009.05.006
Cordonnier, J., Gorintin, F., De Cagny, A., Clément, A. H., & Babarit, A. (2015). SEAREV: Case study of the development of a wave energy converter. Renewable Energy, 80, 40–52. https://doi.org/10.1016/j.renene.2015.01.061
Babarit, A., & Clément, A. H. (2006). Optimal latching control of a wave energy device in regular and irregular waves. Applied Ocean Research, 28, 77–91. https://doi.org/10.1016/j.apor.2006.05.002
Babarit, A., Duclos, G., & Clément, A. H. (2004). Comparison of latching control strategies for a heaving wave energy device in random sea. Applied Ocean Research, 26, 227–238. https://doi.org/10.1016/j.apor.2005.05.003
Salter, S. H., Taylor, J. R. M., & Caldwell, N. J. (2002). Power conversion mechanisms for wave energy. Proceedings of the Institution of Mechanical Engineers Part M, 216, 1–27. https://doi.org/10.1243/147509002320382112
Clement, A. H., & Babarit, A. (2012). Discrete control of resonant wave energy devices. Philosophical Transactions of the Royal Society A—Mathematical Physical and Engineering Sciences, 370, 288–314. https://doi.org/10.1098/rsta.2011.0132
Korde, U. A. (1991). Development of a reactive control apparatus for a fixed two-dimensional oscillating water column wave energy device. Ocean Engineering, 18, 465–483. https://doi.org/10.1016/0029-8018(91)90026-M
Montoya Andrade, D.-E. A., García Santana, A., de la Villa Jaén, A. (2012). Frequency-matching assessment under reactive control on wave energy converters. In Proceedings of the 4th International Conference in Ocean Engineering (ICOE 2012) (pp. 1–6).
Falcão, A. F. O., Justino, P. A. P., Henriques, J. C. C., & André, J. M. C. S. (2009). Reactive versus latching phase control of a two-body heaving wave energy converter. In Proceeding of the European Control Conference 2009 (pp. 1–6).
Falcão, A. F. d. O., & Justino, P. A. P. OWC wave energy devices with air flow control. Ocean Engineering, 26, 1275–95. https://doi.org/10.1016/S0029-8018(98)00075-4
Falcão, a. F. D. O., Vieira, L. C., Justino, P. a. P., & André, J. M. C. S. (2003). By-pass air-valve control of an OWC wave power plant. Journal of Offshore Mechanics and Arctic Engineering, 125, 205. https://doi.org/10.1115/1.1576815
Amundarain, M., Alberdi, M., Garrido, A. J., Garrido, I., & Maseda, J. (2010). Wave energy plants: Control strategies for avoiding the stalling behaviour in the Wells turbine. Renewable Energy, 35, 2639–2648. https://doi.org/10.1016/j.renene.2010.04.009
Alberdi, M., Amundarain, M., Garrido, A. J., Garrido, I., & Maseda, F. J. (2011). Fault-ride-through capability of oscillating-water-column-based wave-power-generation plants equipped with doubly fed induction generator and airflow control. IEEE Transactions on Industrial Electronics, 58, 1501–1517. https://doi.org/10.1109/TIE.2010.2090831
Alberdi, M., Amundarain, M., Garrido, A. J., Garrido, I., Casquero, O., & De la Sen, M. (2011). Complementary control of oscillating water column-based wave energy conversion plants to improve the instantaneous power output. IEEE Transactions on Energy Conversion, 26, 1021–1032. https://doi.org/10.1109/TEC.2011.2167332
Kim, T. H., Setoguchi, T., Takao, M., Kaneko, K., & Santhakumar, S. (2002). Study of turbine with self-pitch-controlled blades for wave energy conversion. International Journal of Thermal Sciences, 41, 101–107. https://doi.org/10.1016/S1290-0729(01)01308-4
Setoguchi, T., Raghunathan, S., Takao, M., & Kaneko, K. (1997). Air-Turbine with self-pitch-controlled blades for wave energy conversion (Estimation of performances in periodically oscillating flow). International Journal of Rotating Machinery, 3, 233–238. https://doi.org/10.1155/S1023621X97000213
Justino, P. A. P., & Falcão, A. F. de O. (1999). Rotational speed control of an OWC wave power plant. Journal of Offshore Mechanics and Arctic Engineering, 121, 65. https://doi.org/10.1115/1.2830079.
Falcao, A. F. de O. (2004). Stochastic modelling in wave power-equipment optimization: Maximum energy production versus maximum profit. Ocean Engineering, 31, 1407–1421. https://doi.org/10.1016/j.oceaneng.2004.03.004
Portillo, J. C. C., Henriques, J. C. C., Falcão, A. F. O., Gomes, R. P. F., Gato, L. M. C. (2015). Theoretical and experimental investigation on latching and rotational speed control. Renewable Energies Offshore, 471–478.
Sarmento, A. J. N., Gato, L. M. C., & Falcão, A. F. O. (1990). Turbine-controlled wave energy absorption by oscillating water column devices. Ocean Engineering, 17, 481–497. https://doi.org/10.1016/0029-8018(90)90040-D
Falcão, A. F. d. O. (2002). Control of an oscillating-water-column wave power plant for maximum energy production. Applied Ocean Research, 24, 73–82. https://doi.org/10.1016/S0141-1187(02)00021-4
Falcão, A. F. O., & Rodrigues, R. J. (2002). Stochastic modelling of OWC wave power plant performance. Applied Ocean Research, 24, 59–71. https://doi.org/10.1016/S0141-1187(02)00022-6
Falcão, A. F. O., & Henriques, J. C. C. (2014). Model-prototype similarity of oscillating-water-column wave energy converters. International Journal of Marine Energy, 6, 18–34. https://doi.org/10.1016/j.ijome.2014.05.002
Falcão, A. F. O., Henriques, J. C. C., & Gato, L. M. C. (2016). Air turbine optimization for a bottom-standing oscillating-water-column wave energy converter. Journal Ocean Engineering Marine Energy, 2, 459–472. https://doi.org/10.1007/s40722-016-0045-7
Henriques, J. C. C., Gato, L. M. C., Falcão, A. F. O., Robles, E., & Faÿ, F. X. (2016). Latching control of a floating oscillating-water-column wave energy converter. Renewable Energy, 90, 229–241. https://doi.org/10.1016/j.renene.2015.12.065
Henriques, J. C. C., Gato, L. M. C., Lemos, J. M., Gomes, R. P. F., & Falcao, A. F. (2016). Peak-power control of a grid-integrated oscillating water column wave energy converter. Energy, 109, 378–390. https://doi.org/10.1016/j.energy.2016.04.098
Henriques, C., Kelly, J., Mueller, M., Faÿ, F., Abusara, M., & Sheng, W., et al. (2020). Comparative assessment of control strategies for the biradial turbine in the Mutriku OWC plant. 146, 2766–2784. https://doi.org/10.1016/j.renene.2019.08.074
Falcão, A. F. O., Henriques, J. C. C., & Gato, L. M. C. (2017). Rotational speed control and electrical rated power of an oscillating-water-column wave energy converter. Energy, 120, 253–261. https://doi.org/10.1016/j.energy.2016.11.078
Henriques, J. C. C., Portillo, J. C. C., Sheng, W., Gato, L. M. C., & Falcão, A. F. O. (2019). Dynamics and control of air turbines in oscillating-water-column wave energy converters: Analyses and case study. Renewable and Sustainable Energy Reviews, 112, 571–589. https://doi.org/10.1016/j.rser.2019.05.010
Tedd, J., Kofoed, J. P., Jasinski, M., Morris, A., Friis-Madsen, E., & Wisniewski, R., et al. (2007). Advanced control techniques for WEC wave dragon. In Proceeding of the 7th European Wave and Tidal Energy Conference (pp. 1–7).
Reza, C. M. F. S., Islam, M. D., & Mekhilef, S. (2014). A review of reliable and energy efficient direct torque controlled induction motor drives. Renewable and Sustainable Energy Reviews, 37, 919–932. https://doi.org/10.1016/j.rser.2014.05.067
Merabet Boulouiha, H., Allali, A., Laouer, M., Tahri, A., Denaï, M., & Draou, A. (2015). Direct torque control of multilevel SVPWM inverter in variable speed SCIG-based wind energy conversion system. Renewable Energy, 80, 140–152. https://doi.org/10.1016/j.renene.2015.01.065.
Lagoun, M. S. (2014). A predictive power control of doubly fed induction generator for wave energy converter in irregular waves. In International Conference on Green Energy ICGE (pp. 26–31).
Xiang, J., Brooking, P. R. M., & Mueller, M. A. (2002). Control requirements of direct drive wave energy converters. In IEEE Region 10 international conference on computers, communications, control power engineering TENCOM ’02 (Vol. 3, pp. 2053–2056). https://doi.org/10.1109/TENCON.2002.1182746.
Garrido, I., Garrido, A. J., Alberdi, M., Amundarain, M., & Barambones, O. (2013). Performance of an ocean energy conversion system with DFIG sensorless control. Mathematical Problems in Engineering, 2013. https://doi.org/10.1155/2013/260514.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this chapter

Cite this chapter
Suchithra, R., Samad, A. (2022). Control of Wave Energy Converters. In: Samad, A., Sannasiraj, S., Sundar, V., Halder, P. (eds) Ocean Wave Energy Systems. Ocean Engineering & Oceanography, vol 14. Springer, Cham. https://doi.org/10.1007/978-3-030-78716-5_16
Download citation
DOI: https://doi.org/10.1007/978-3-030-78716-5_16
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-78715-8
Online ISBN: 978-3-030-78716-5
eBook Packages: EnergyEnergy (R0)