
Abstract
A 12 degree-of-freedom dynamic model for FZG-A10 spur gears considering the actual time-varying gear mesh stiffness and the frictional effects between meshing gear teeth is investigated. The energetic Lagrange formulation was used to recover the equations of motion of the generalized translational torsional coupled dynamic system. Its dynamic response was computed by an iterative implicit scheme of Newmark.
The main ameliorations achieved by this new model are evaluated in this work through a gear dynamics responses comparison with previously classical developed models which can be found in the literature. The simulation results are arranged using the listed dynamic models considering no coefficient of friction, an experimental constant coefficient of friction and an EHL based coefficient of friction formulation including an average surface roughness. The vibration responses are calculated based on the indicated previous models under several operating conditions (load and rotational speed). The transmission error (TE) parameter is evaluated domains since it is considered as an index for the vibration performance.
The influence of constant and variable coefficient of friction formulation was studied and their corresponding transmission error were compared.
The new dynamic model proves their refining results counter to other models in diagnostic and monitoring performance.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The modern automotive engineering considers that the gear noise reduction in the ground and air vehicles like heavy-duty trucks and helicopters is a prominent challenge (He 2008). The transmission error (TE) parameter is quantified as it is a reliable indicator of the noise and vibration performance. To achieve such objective, various researchers carried out models aiming to simulate the gear dynamics (Beyaoui et al. 2016). They developed a large variety of dynamic models to predict the gear vibration response which improves gearbox monitoring and diagnostic. Most models process the cases of the damaged gearbox which is contaminated by different noises (Velex and Maatar 1996; Velex and Ajmi 2006; Chaari et al. 2008; Walha et al. 2009; Feki et al. 2013; Sainte-Marie et al. 2017; Feki et al. 2017). They reported that the main source of transmission error is the derivation from the ideal tooth profile which can be induced by spalling, tooth breakage, tooth surface pitting, wear or tooth crack. They studied these faults to show their effects on the gear dynamic behavior. They stated that the gear mesh frequency band presenting the sidebands around its harmonics is very sensitive to the defect degree which is useful mainly for tooth fault detection and localization.
Therefore, the gear design engineers who prospect the reduction of transmission error variations are working on manufacturing processes and tooth modifications to conceive low noise gears.
From most of the presented models, the transmission error is the primary excitation that generates noise and vibration in the gearing system. However, scarce models proposed that friction might also be a significant contributor in defining the vibration features (Tang et al. 2010; Li et al. 2013; Jiang et al. 2017; Park 2019). They introduced the effect of the friction coefficient between gear tooth contacts in more complex dynamic models which may lead to increase in the accuracy of diagnostic and monitoring results.
In this study, the main effects of tooth friction on spur gear dynamics with their associated vibration responses are evaluated. The transmission error variations are predicted using a contact mechanics model coupling with and without tooth friction effects. A twelve degree-of-freedom dynamic model considering constant and local coefficient of frictions is investigated to predict the vibration characteristics. The analytical simulations are performed using different frictional cases and they are compared with experimental data to be validated. The proposed model predictions are expected to provide a better understanding of the mechanisms of noise generation in spur gear pairs and to establish an effective and accurate vibration detection for monitoring lubrication conditions.
2 MDOF Dynamic Gear Model
2.1 Frictional Model
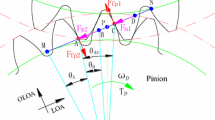
A twelve degree of freedom model is developed to quantify the frictional effects on gearbox-noise through transmission error prediction. The test gearbox of the FZG gear machine is modelled using a multi-degree of freedom (MDOF) model as shown in Fig. 1. Extra details about the experimental set up can be found in (Hammami et al. 2019a).
Torsional (\(\theta_{i}\)) and translational (\(v_{i} ,w_{i}\)) coupled effects are considered through the following DOF’s vector where i = 1, g, p, 2 designate shaft 1, gear, pinion and shaft 2, respectively \(X = [v_{1} ,w_{1} ,\theta_{1} ,v_{g} ,w_{g} ,\theta_{g} ,v_{p} ,w_{p} ,\theta_{p} ,v_{2} ,w_{2} ,\theta_{2} ]^{T}\). The studied system is composed of shaft 1 connected the gear g to the motor and shaft 2 related the pinion p to the static load which is applied through load lever and weights. Mi, Ji, and θi are the mass, polar mass moment of inertia and torsional motion of the system elements. The Kxi and Kyi are the bearings stiffness and the Cxi and Cyi are the damping elements. Km(t) is the time-varying mesh stiffness and Cm is the gears damper and e represents static transmission error excitation for the gear mesh.

A 12 degrees of freedom dynamic model simulating FZG test gearbox
A computational frictional model of the FZG test gearbox, with integrated mass, damping, nonlinear stiffness and frictional stiffness matrices [M], [C], [K] and [Kμ] is developed to characterize the spur gear dynamic responses.
The governing equations for the proposed model considering friction coefficients, where the gyroscopic moments and centrifugal effects are neglected, are detailed as follow:
Where \(F_{1} \left( {\mu ,t,\left\{ X \right\}} \right)\) is a vector embedded the nominal input torque (Cm (t, X, μ) and the instantaneous output torque (Cr (T, X, μ) which is function of the toot friction (μ) and profile deviations (e) and \(F_{2} \left( {\mu ,t,e(M)} \right)\) is an external vector induced by tooth shape deviations and errors (e (M)).
2.2 Incorporation of the Coefficient of Friction
The EHL based formulation for a time-dependent coefficient of friction proposed by Xu et al. (2007) is defined in Eq. (2). The μ coefficient issued from many linear regression analysis depends on several factors like \(SR,\,\,P_{h} ,\,\,\nu_{0} ,\,\,S,\,\,V_{r}^{{}} ,\,\,\mu_{0}^{{}} ,\,\,R\) are respectively the slide to roll ratio, maximum Hertzian pressure, dynamic viscosity, surface roughness, rolling velocity, kinematic viscosity at oil inlet temperature and effective radius of curvature. The constant coefficients bi for the selected axle gear oil are illustrated for i = 1–9 respectively −8.92, 1.03, 1.04, −0.35, 2.81, −0.10, 0.75, -0.39, and 0.62.
2.3 Model Discretization
The presented equations of motion are solved thanks to the Newmark iterative algorithm. The numerical simulations have been conducted by using a constant Newmark parameters λ = β = 0.5 which provide a stable and convergent method. Figure 2 shows the diagram for transmission error simulation using the dynamic model of spur gear pair considering friction of tooth surface. All the presented steps are given by authors previous work (Hammami et al. 2019b).

Diagram for the transmission error prediction using the dynamic model
3 Dynamic Results and Discussion
An FZG A10 spur gear is taken as an example to apply the proposed MDOF model. Table 1 displayed the relative parameters of the spur gear pair.
All simulation results illustrated subsequently were run under K8 load stage which corresponds to an input torque of 172 Nm and at a constant rotational speed of 1000 rpm. Based on experimental results, a constant coefficient is determined for these operating conditions where COF = 0.035 (Hammami et al. 2019b). The modelled test gearbox is lubricated with 75W90-A axle gear oil. The lubricant properties can be found in Table 2 (Hammami et al. 2017).
To provide an efficient evaluation of the dynamic interaction between transmission error and frictional effects, the simulated results are drawn afterwards.
The dynamic responses under stabilized operating conditions and mainly the simulated transmission error results with and without coefficient of friction are presented in Fig. 3. Figures 3a, 3c and 3e show the time domain dynamic transmission error while Figs. 3b, 3d and 3f present the frequency domain of DTE. Only steady-state responses are presented.
It is observed that the shape of the temporal DTE curve is modified as the coefficient of friction changed. Larger oscillations appear with constant COF against COF equal to zero. Slightly different behavior is noticed between constant and Local COF. The introduction of tooth contact friction enhanced the dynamic transmission error (see Figs. 3a, 3c and 3e). Figures 3b, 3d and 3f expose the TE spectra for the three listed cases: COF = 0, constant COF and local COF. The mesh frequency (fm = 266.7 Hz) and its harmonics (2fm, 3fm, 4fm, 5fm) are shown in each spectrum and their amplitudes are displayed in Table 3. This highest amplitude is demonstrated at the fifth harmonic of the mesh frequency. These results are proved based on experimental TE signals which are measured using optical encoders mounted on FZG test rig as reported by Feki et al. (2013). According to their analysis, the frequency with significant amplitude corresponds to a critical frequency of the test gearbox system including shafts, bearings and test gears where the gear element contributes with a large portion about 84,19%.

Predicted transmission error and its corresponding spectrum under K8 load stage at 1000 rpm: subfigures (a-b) are for COF = 0, (c-d) are for constant COF and (e-f) are for Local COF
It can be noticed that an increase in COF has a significant effect mainly at the fifth harmonics (see Table 3). This reveals the influence of the lubrication regime related to the coefficient of friction on the dynamic transmission error spectra.
For the sake of comparison, Fig. 4 illustrated the TE spectrum of each model in a logarithmic scale where the difference between the used dynamic models became more plausible. A new interesting frequency appears which corresponds to the first natural resonance frequency which is equal to 492 Hz. The constant and local COF increased the amplitude of DTE up to 11 times compared to the corresponding results without COF. It is observed that the local COF compared to constant COF can reduce slightly the gear noise and vibration.

Spectra of the simulated TE signal with and without COF
In particular, the proposed model quantifies the contribution of sliding friction which could be significant when the transmission error is minimized through a local COF.
The sets of results concluded a critical analysis concerning the influence of COF on the transmission errors behavior inducing noise and vibration in gear dynamics.
4 Conclusion
MDOF analytical models are investigated to study the frictional effects on dynamic transmission error of spur gears. On this basis, the effect of the friction coefficient is introduced through an effective mesh stiffness in the derived equations. Analytical models match well with a benchmark experimental published results thus validating the proposed model.
The DTE responses of spur gears were analyzed with and without friction coefficient. The increase of the frictional force magnitude causes a change of DTE than that without friction, which indicates the increase of gear noise. The coefficient of frictions are considered with constant or variable values. A constant friction coefficient provides marginal results. However, a local COF is implemented to simulate realistic lubrication conditions where the COF values are smaller which can reduce the friction-induced vibration as expected. This methodology proved its efficiency in promoting a better estimation of the dynamic diagnostic.
References
Beyaoui, M., Tounsi, M., Abboudi, K., Feki, N., Walha, L., Haddar, M.: Dynamic behaviour of a wind turbine gear system with uncertainties. C.R. Mec. 344(6), 375–387 (2016). https://doi.org/10.1016/j.crme.2016.01.003
Chaari, F., Baccar, W., Abbes, M.S., Haddar, M.: Effect of Spalling or tooth breakage on gear mesh stiffness and dynamic response of a one-stage spur gear transmission. Eur. J. Mech.-A/Solids 27(4), 691–705 (2008). https://doi.org/10.1016/j.euromechsol.2007.11.005
Feki, N., Cavoret, J., Ville, F., Velex, P.: Gear tooth pitting modelling and detection based on transmission error measurements. Eur. J. Comput. Mech./Revue Européenne de Mécanique Numérique 22(2–4), 106–119 (2013). 10(1080/17797179),pp. 820885 (2013)
Feki, N., Karray, M., Khabou, M.T., Chaari, F., Haddar, M.: Frequency analysis of a two-stage planetary gearbox using two different methodologies. C.R. Mec. 345(12), 832–843 (2017)
Hammami, M., Fernandes, C.M., Martins, R., Abbes, M.S., Haddar, M., Seabra, J.: Torque loss in FZG-A10 gears lubricated with axle oils. Tribol. Int. 131, 112–127 (2019a). https://doi.org/10.1016/j.triboint.2018.10.017
Hammami, M., Feki, N., Ksentini, O., Hentati, T., Abbes, M.S., Haddar, M.: Dynamic effects on spur gear pairs power loss lubricated with axle gear oils. In: Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science (2019b). https://doi.org/10.1177/0954406219888236
Hammami, M., Martins, R., Abbes, M.S., Haddar, M., Seabra, J.: Axle gear oils: friction behaviour under mixed and boundary lubrication regimes. Tribol. Int. 116, 47–57 (2017)
He, S.: Effect of sliding friction on spur and helical gear dynamics and vibro-acoustics. Dissertation, The Ohio State University (2008)
Jiang, L., Deng, Z., Gu, F., Ball, A.D., Li, X.: Effect of friction coefficients on the dynamic response of gear systems. Front. Mech. Eng. 12(3), 397–405 (2017). https://doi.org/10.1007/s11465-017-0415-4
Li, W., Wang, L., Chang, S.: Excitation prediction by dynamic transmission error under sliding friction in helical gear system. Trans. Tianjin Univ. 19(6), 448–453 (2013). https://doi.org/10.1007/s12209-013-1971-2
Park, C.I.L.: Tooth friction force and transmission error of spur gears due to sliding friction. J. Mech. Sci. Technol. 33(3), 1311–1319 (2019). https://doi.org/10.1007/s12206-019-0232-2
Sainte-Marie, N., Velex, P., Roulois, G., Caillet, J.: A study on the correlation between dynamic transmission error and dynamic tooth loads in spur and helical gears. J. Vibr. Acoustics 139(1) (2017). https://doi.org/10.1115/1.4034631
Tang, J.Y., Wang, Q.B., Luo, C.W.: Study on effect of surface friction on the dynamic behaviours of cylindrical gear transmission. Adv. Mater. Res. 139, 2316–2321 (2010). https://doi.org/10.4028/www.scientific.net/AMR.139-141.2316
Velex, P., Maatar, M.: A mathematical model for analyzing the influence of shape deviations and mounting errors on gear dynamic behaviour. J. Sound Vibr. 191, 629–660 (1996)
Velex, P., Ajmi, M.: On the modeling of excitations in geared systems by transmission errors. J. Sound Vib. 290, 882–909 (2006). https://doi.org/10.1016/j.jsv.2005.04.033
Walha, L., Fakhfakh, T., Haddar, M.: Nonlinear dynamics of a two-stage gear system with mesh stiffness fluctuation, bearing flexibility and backlash. Mech. Mach. Theory 44(5), 1058–1069 (2009). https://doi.org/10.1016/j.mechmachtheory.2008.05.008
Xu, H., Kahraman, A., Anderson, N.E., Maddock, D.G.: Prediction of mechanical efficiency of parallel-axis gear pairs. J. Mech. Des. 10(1115/1), 2359478 (2007)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Hammami, M., Ksentini, O., Feki, N., Abbes, M.S., Haddar, M. (2021). Dynamic Interaction Between Transmission Error and Friction Coefficients for FZG-A10 Spur Gears. In: Feki, N., Abbes, M.S., Taktak, M., Amine Ben Souf, M., Chaari, F., Haddar, M. (eds) Advances in Acoustics and Vibration III. ICAV 2021. Applied Condition Monitoring, vol 17. Springer, Cham. https://doi.org/10.1007/978-3-030-76517-0_16
Download citation
DOI: https://doi.org/10.1007/978-3-030-76517-0_16
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-76516-3
Online ISBN: 978-3-030-76517-0
eBook Packages: EngineeringEngineering (R0)