
Abstract
Vibration-based Structural Health Monitoring (SHM) methods often rely upon vibration responses measured with a pervasive network of sensors. In some cases, it does not look possible for technical and economic reasons to equip civil structures with a distributed sensing system. Hence, the amount of information to handle for damage detection may be seriously affected by environmental and/or operational variability, leading to false detection results. To address this challenge, we present a parametric spectral method based on AutoRegressive (AR) modeling to set the damage-sensitive structural features. The spectra of the AR models associated with the normal and damaged conditions are collected into two matrices, to provide individual multivariate feature datasets in the frequency domain. By vectorising the matrices, two series of feature samples relevant to the normal and damaged conditions are obtained. To detect damage, the Log-spectral distance method is adopted to measure the similarity between the two aforementioned feature vectors. The effectiveness and accuracy of the proposed approach are assessed through limited vibration data relevant to the IASC-ASCE benchmark problem. Results show that the AR spectrum stands as a reliable and sensitive feature for partially observed structures, hence in the case of limited sensor locations; additionally, the presented distance methodology succeeds in detecting early damage.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Structural health monitoring
- Damage detection
- Partially observed systems
- Parametric spectral estimation
- AutoRegressive model
- Log-spectral distance
1 Introduction
Civil structures are important systems in the today society. It is imperative to protect them from any damage due to aging, material deterioration and ever increasing external excitations. A vibration-based structural health monitoring (SHM) technique may assess the health and safety of civil structures, and detect any possible structural damage by processing vibration measurements [1,2]. SHM strategies are usually classified into three levels, relevant to damage diagnosis: early damage detection (Level 1), localization (Level 2), and quantification (Level 3) [3].
It is possible to cope with all these levels through model-based and data-based methods. A model-based approach needs e.g. a detailed finite element model of the real structure, and often uses inherent structural properties and modal data for damage diagnosis [4,5,6,7,8]. Due to discrepancies between the model predictions and the measured vibration data acquired from the real structure, model-based SHM algorithms are in need of procedures to correct the finite element model, i.e. of model updating techniques [9,10]. On the contrary, a data-based SHM strategy only uses raw vibration measurements for statistical pattern recognition [4,11,12,13,14]. As data-based methods do not require finite element modeling and model updating procedures, they look more suitable and simpler than the model-based ones for implementing SHM strategies.
Most of the data-based methods consist of feature extraction and statistical analysis. The feature extraction step focuses on discovering damage-sensitive features from the measured raw vibration data. The term damage-sensitive feature means that any information extracted from the vibration measurements should be sensitive to damage and should not be related to other factors, such as the operational and environmental conditions [14,15,16,17]. As the majority of data-based methods are based on the measured vibration signals, it is necessary to adopt advanced signal processing techniques to extract the said damage-sensitive features [18,19]. These techniques can work in the time, frequency, and time-frequency domains.
Time series modeling is a powerful tool for feature extraction from any kind of time-domain vibration measurements, which can be stationary, non-stationary, linear, nonlinear, seasonal, non-seasonal, etc. [20,21]. Fast Fourier transform (FFT) and short time Fourier transform (STFT) are well-known signal processing techniques in the frequency domain [22]. As an alternative, spectral-based methods based on non-parametric and parametric approaches provide another kind of signal processing techniques in the frequency domain [23]. For the time-frequency domain, one can exploit adaptive signal decomposition approaches, such as the empirical mode decomposition (EMD), ensemble empirical mode decomposition (EEMD), or other techniques [24].
The statistical analysis handles the damage-sensitive features obtained with the feature extraction or signal processing techniques, to make a decision about damage via statistical approaches [11]. As for the level of early damage detection, the main goal of the procedure is to distinguish a normal or undamaged condition from a damaged one. This means that the process of damage detection via statistical analysis has to compare two structural states, in order to quantify their discrepancies considered indicative of damage occurrence [25]. Efficient and effective approaches to measure the similarity between two structural states are, e.g. the statistical distance techniques [26]. Depending upon the type and dimension of features (i.e. univariate or multivariate, time-domain or frequency-domain, etc.), there are several distance formulations, such as the Mahalanobis [27], correlation coefficient [28], Kullback-Leibler [29,30], dynamic time warping [31,32] ones, which are used in the statistical analysis for damage diagnosis.
Before working on feature extraction and statistical analysis, an initial step of SHM is the installation of sensors on the structure for gathering effective dynamic information. The effectiveness of an SHM system rely upon the sensitivity of features to the damage, as extracted from vibration data that may be obtained with a dense sensor network. Therefore, an important issue in SHM applications is to deploy an adequate number of sensors, and optimize their locations [33]. Although advances in sensing technology have enabled the use of a large number of sensors, their costs and supporting instruments may provide serious obstacles. On the other hand, most of the civil structures in need of an SHM strategy are complex and large-scale, so that the installation of pervasive sensor networks may become impossible. Under such circumstances, the structures turn out to be equipped with limited sensor arrays, that may decrease the sensitivity of features to damage and the detectability of the damage itself [33].
Taking into consideration the challenging issue of handling limited sensor output for SHM applications, this work proposes a data-based damage detection approach via a parametric spectral-based feature extraction method and a log-spectral distance (LSD) technique. The proposed feature extraction method rests on an Autoregressive (AR) representation to model the vibration responses in the time-domain, as acquired for the normal and damaged structural conditions, and estimates their spectra by the Burg method. Next, the AR spectra at all sensor locations are collected into two different matrices, which represent multivariate feature datasets. The matrix vectorization technique is adopted to convert these matrices into two feature vectors. Eventually, those are used in the LSD formulation to detect damage, or discriminate the normal condition from the damaged one. The major contributions of the proposed spectral-based feature extraction method are to cope with the drawbacks of limited data collected by the sensor network, and to increase the detectability of damage by extracting features highly sensitive to damage. The main advantage of the proposed LSD method is shown to be the ability to detect damage and estimate the level of damage severity. The IASC-ASCE benchmark problem in its second phase has been used to assess the performance and effectiveness of the proposed method. Results show that the LSD technique, in conjunction with the AR spectrum, provides a reliable and successful tool for detecting damage and quantifying damage severity in case of very limited sensor networks, hence in case of largely unobserved structural systems.
2 Parametric Spectral-Based Feature Extraction with AR Modeling
Spectral analysis is used to characterize the frequency content of a signal [34,35], by estimating its power spectral density (PSD) from the time-domain representation. Spectral analysis can be carried out by means of non-parametric and parametric methods. Non-parametric techniques, such as the FFT-based Welch method or periodogram, do not require a prior knowledge of the signal data. Parametric methods, such as the Burg, covariance, and MUSIC ones, are model-based approaches that allow instead for prior knowledge of the signal, and can yield more accurate spectral estimates. The superior performance of parametric methods is linked to their tendency to lead to better results and higher resolutions [36].
The linear model most commonly used in parametric approaches is the AR one. There are several AR spectral estimation methods that are based on different estimates of the AR parameters, like e.g. the Yule-Walker, Burg, covariance and modified covariance ones [36]. Given the vibration signal y(t), the AR model reads:
where r(t) is an independent, identically distributed stochastic sequence with zero mean at time t, also known as the residual error. In Eq. (1), p denotes the order of the AR model, and θ1…θp are the model parameters to be estimated. For the determination of the model order, the Bayesian information criterion (BIC) is formulated as follows [37]:
where n denotes the number of data points in the vibration signal, and σr2 is the variance of the model residuals.
Among the different AR spectral estimation approaches, the Burg method is based on the minimization of the forward and backward prediction errors, also satisfying the Levinson-Durbin recursion [38]. The advantages of the Burg method, if compared to other AR spectral estimation techniques, are the capability of resolving closely spaced sinusoids in signals with low noise levels, and of estimating short data records [39]. In addition, it provides a computationally efficient method for the parameter estimation. The estimate of the AR spectrum P(ω) is thus given in the following form:
3 Log-Spectral Distance Method
The LSD method is a distance measure between two spectra, often used in speech processing [40]. Given the two spectra P(ω) and \(\stackrel{-}{P}\)(ω), in the discrete frequency domain the LSD is provided by:
The LSD is zero if and only if the spectra P(ω) and \(\stackrel{-}{P}\)(ω) are exactly similar; any difference between the two leads instead to an LSD value larger than zero.
If P(ω) and \(\stackrel{-}{P}\)(ω) are obtained from the AR model in the undamaged and damaged conditions, any deviation of \(\stackrel{-}{P}\)(ω) away from P(ω) is indicative of damage occurrence. Therefore, the LSD method, in conjunction with the AR spectra obtained with the Burg method, can be able to distinguish the damaged state from the baseline, by calculating the distance between the two relevant spectra.
4 Damage Detection Scheme
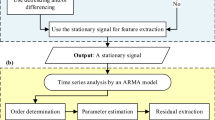
The proposed data-based damage detection scheme that exploits AR spectra as the main damage-sensitive features and the LSD technique, is shown in Fig. 1. It consists of five steps: (i) determination of the AR order; (ii) estimation of the AR parameters and spectra; (iii) collection of all estimated AR spectra at all sensor locations in multivariate datasets (matrices); (iv) vectorization of the matrices; (v) calculation of LSD between the vectors related to the undamaged and damaged states.

Flowchart of the proposed damage detection scheme via AR spectra and LSD method
In the first step, the model order p is determined with the BIC technique at each sensor location for the vibration responses characterizing the normal condition. The Burg method is then applied to estimate the parameters of AR models associated with the vibration responses of the normal and damaged conditions. It is then possible to estimate the AR spectrum for each vibration dataset. All the AR spectra are next collected into the two matrices Pn(ω) ∈ ℜm×s and Pd(ω) ∈ ℜm×s, where m and s denote the numbers of spectrum samples and sensors and subscripts “n” and “d” respectively refer to the normal and damaged conditions. The matrix vectorization technique is used to convert the multivariate datasets Pn(ω) and Pd(ω) into the vectors ρn(ω) and ρd(ω), each of which includes m × s samples. Finally, these vectors are used in the LSD equation in order to detect damage.
4.1 Experimental Verification on a Steel Structure
The performance and accuracy of the proposed method are now validated via the experimental datasets relevant to the IASC-ASCE benchmark problem: interested readers can find all the technical details in [41]. The structure was a four-story, 2-bay-by-2-bay steel frame with the bracing system of each bay made by two threaded steel rods. A random excitation was applied on the fourth floor, and to measure the vibration responses each floor was equipped with three accelerometers collecting data at a frequency of 250 Hz; Table 1 lists the numbering and location of each sensor. A structural damage was induced by removing the bracing systems from the east and south-east sides of the frame, see Table 2. Vibration responses acquired by sensors #1–3 at the base of the structure do not provide relevant information [42], and have not been accounted for in the analysis.
To assess the stationarity of the acceleration time histories and prove the efficacy of AR modeling, the LMC hypothesis test under the 95% confidence interval (with a c-value = 0.1460) has been adopted: Fig. 2a shows the test statistics for Case 1. All the values of the test statistics are smaller than the c-value, which means that the acceleration responses are stationary and the AR model can work efficiently. The same conclusion can be arrived at for all the other cases. Next, the BIC technique is adopted to determine the order of the AR model at each sensor location for the undamaged condition: Fig. 2b shows the model orders for sensors #4–15 in Case 1.
Having obtained the model orders, the AR parameters for all the cases have been estimated by the Burg method, and the sensitivity of the AR spectra to damage has been checked.

(a) Stationary assessment and AR model identification by the LMC hypothesis test, and (b) AR orders obtained with the BIC technique in Case 1
With 15 sensors deployed, we have assumed the steel structure to be equipped with a relatively dense sensor network. To detect instead damage with a limited number of sensors, information from a few sensors only has been considered: four groups of sensors (see Table 3) have been managed to investigate the effect of partial observations on damage detection.
The AR model parameters for the sensors in each group have been used to estimate the AR spectra via the Burg method, and build the matrices Pn(ω) and Pd(ω) associated to the undamaged and damaged states. These matrices are then converted into the vectors ρn(ω) and ρd(ω) for damage detection via Eq. (4). For the first and second groups, these vectors gather 1028 samples, as matrices Pn(ω) and Pd(ω) are 257 × 4 in size; for the third and fourth groups, the vectors ρn(ω) and ρd(ω) instead include 771 and 514 samples, respectively.
To provide measurements relevant to the undamaged state, noise levels of 5%, 10%, and 15% have been allowed for. A threshold limit for damage detection, based on the 95% confidence interval of the LSD values gained for the normal conditions, has been set accordingly. The average distance values have been then computed: results with the assumed four sensor groups are shown in Fig. 3, where the dashed red line represents the threshold limit equal to 0.1121. The LSD values relevant to Cases 2–5, for all the sensor groups, exceed the threshold limit and therefore testify that damage has been incepted. The other way around, the distance values relevant to the three normal conditions featuring different noise levels, are all smaller than the threshold limit. Among the damaged states, the second scenario is characterized by the largest LSD value, while Case 5 by the smallest: this means that the highest and lowest levels of damage severity are linked to Cases 2 and 5, respectively.

Early damage detection by the proposed LSD method and AR spectrum

Early damage detection by the proposed LSD method and PSD
One may attempt to perform damage detection via the conventional power spectral density (PSD), which is taken into account as the feature obtained from the non-parametric spectral-based technique. The results of damage detection relevant to the four sensor groups, as based on the LSD and PSD, are shown in Fig. 4. This comparison testifies that, although most of the LSD values violate the threshold limit which is equal to 0.7935, there is an error in detecting damage associated with Case 5 in the fourth sensor group. Regardless of the threshold limit, it is also difficult to distinguish Case 5 from the undamaged conditions with the second and fourth sensor groups. Several wrong estimates are therefore observable in the results of Cases 2–4. With the first, second, and third sensor groups, Case 3 is shown to provide the largest LSD value; furthermore, with the second group it can be seen that the LSD value for Case 4 is larger than the corresponding value for Case 2. Based on the comparison between the results of damage detection and damage level estimation reported in Figs. 3 and 4, it can be concluded that the AR spectrum is superior to the conventional PSD.
5 Conclusions
This paper has dealt with the drawback of damage detection in case of a limited number of sensors used for SHM purposes. A parametric spectral-based feature extraction approach, based on AR modeling and the Burg method, has been proposed to estimate the AR spectrum as the main damage-sensitive feature of the structural response. The LSD technique has been then introduced to detect a structural damage by measuring the distance between the AR spectra corresponding to the undamaged and damaged conditions. The experimental datasets of the IASC-ASCE benchmark has been adopted to validate the effectiveness and accuracy of the proposed method, using a limited number of sensors in the presence of some uncertainties regarding the normal conditions.
The results have proven that the proposed LSD method in conjunction with the AR spectrum is effective in detecting damage. Moreover, it has been shown that the proposed technique is able to estimate the level of damage severity. For the experimental structure, it has been confirmed that the AR parameters and spectra are sensitive to damage. The comparison between the AR spectrum and PSD has revealed that the parametric spectral-based method is superior to the non-parametric technique, both in detecting damage and also in estimating the level of damage severity.
References
Karbhari, V.M., Ansari, F.: Structural health monitoring of civil infrastructure systems. Elsevier, New York (2009)
Mesquita, E., Antunes, P., Coelho, F., André, P., Arêde, A., Varum, H.: Global overview on advances in structural health monitoring platforms. J. Civ. Struct. Health Monit. 6(3), 461–475 (2016)
Fassois, S.D., Sakellariou, J.S.: Time-series methods for fault detection and identification in vibrating structures. Philosoph. Trans. Roy. Soc. Lond. A: Math. Phys. Eng. Sci. 365, 411–448 (2007)
Entezami, A., Shariatmadar, H., Sarmadi, H.: Structural damage detection by a new iterative regularization method and an improved sensitivity function. J. Sound Vib. 399, 285–307 (2017)
Entezami, A., Shariatmadar, H., Ghalehnovi, M.: Damage detection by updating structural models based on linear objective functions. J. Civ. Struct. Health Monit. 4(3), 165–176 (2014)
Eftekhar Azam, S., Mariani, S.: Online damage detection in structural systems via dynamic inverse analysis: a recursive Bayesian approach. Eng. Struct. 159, 28–45 (2018)
Sarmadi, H., Entezami, A., Ghalehnovi, M.: On model-based damage detection by an enhanced sensitivity function of modal flexibility and LSMR-Tikhonov method under incomplete noisy modal data. Engineering with Computers. (in press)
Entezami, A., Sarmadi, H., Saeedi Razavi, B.: An innovative hybrid strategy for structural health monitoring by modal flexibility and clustering methods. J. Civil Struct. Health Monit. (in press).
Sarmadi, H., Karamodin, A., Entezami, A.: A new iterative model updating technique based on least squares minimal residual method using measured modal data. Appl. Math. Model. 40(23), 10323–10341 (2016)
Rezaiee‐Pajand, M., Entezami, A., Sarmadi, H.: A sensitivity‐based finite element model updating based on unconstrained optimization problem and regularized solution methods. Struct. Control Health Monit. (2020)
Farrar, C.R., Worden, K.: Structural Health Monitoring: A Machine Learning Perspective. Wiley, Chichester (2013)
Entezami, A., Sarmadi, H., Behkamal, B., Mariani, S.: Big data analytics and structural health monitoring: a statistical pattern recognition-based approach. Sensors 20(8), 2328 (2020)
Sarmadi, H., Karamodin, A.: A novel anomaly detection method based on adaptive Mahalanobis-squared distance and one-class kNN rule for structural health monitoring under environmental effects. Mechanical Systems and Signal Processing (2020)
Entezami, A., Sarmadi, H., Salar, M., Behkamal, A., Arslan, A.N., De Michele, C.: A novel structural feature extraction method via time series modelling and machine learning techniques for early damage detection in civil and architectural buildings. In; International Conference on Emerging Technologies In Architectural Design (ICETAD2019) (2019)
Entezami, A., Shariatmadar, H., Karamodin, A.: Data-driven damage diagnosis under environmental and operational variability by novel statistical pattern recognition methods. Struct. Health Monit. 18(5–6), 1416–1443 (2018)
Entezami, A., Shariatmadar, H., Mariani, S.: A novelty detection method for large-scale structures under varying environmental conditions. In: Sixteenth International Conference on Civil, Structural & Environmental Engineering Computing (CIVIL-COMP 2019), Riva del Garda, Italy, 16–19 September, 2019 (2019)
Entezami, A., Shariatmadar, H., Mariani, S.: Structural health monitoring for condition assessment using efficient supervised learning techniques. Proceedings 42(1), 17 (2020)
Amezquita-Sanchez, J.P., Adeli, H.: Signal processing techniques for vibration-based health monitoring of smart structures. Arch. Comput. Meth. Eng. 23(1), 1–15 (2016)
Sarmadi, H., Entezami, A., Daneshvar Khorram, M.: Energy-based damage localization under ambient vibration and non-stationary signals by ensemble empirical mode decomposition and Mahalanobis-squared distance. J. Vib. Control 26(11–12), 1012–1027 (2020)
Omenzetter, P., Brownjohn, J.M.W.: Application of time series analysis for bridge monitoring. Smart Mater. Struct. 15(1), 129 (2006)
Ma, J., Xu, F., Huang, K., Huang, R.: GNAR-GARCH model and its application in feature extraction for rolling bearing fault diagnosis. Mech. Syst. Signal Process. 93, 175–203 (2017)
Mohammed, O.D., Rantatalo, M.: Dynamic response and time-frequency analysis for gear tooth crack detection. Mech. Syst. Signal Process. 66, 612–624 (2016)
Masciotta, M.-G., Ramos, L.F., Lourenço, P.B., Vasta, M., De Roeck, G.: A spectrum-driven damage identification technique: application and validation through the numerical simulation of the Z24 Bridge. Mech. Syst. Signal Process. 70, 578–600 (2016)
Entezami, A., Shariatmadar, H.: Damage localization under ambient excitations and non-stationary vibration signals by a new hybrid algorithm for feature extraction and multivariate distance correlation methods. Struct. Health Monit. 18(2), 347–375 (2019)
Worden, K., Farrar, C., Manson, G., Park, G.: The fundamental axioms of structural health monitoring. Proc. Roy. Soc. A: Math. Phys. Eng. Sci. 463, 1639–1664 (2007)
Deza, M. M., Deza, E.: Encyclopedia of distances, in Encyclopedia of Distances, pp. 1–583. Springer (2009)
Worden, K., Manson, G., Fieller, N.R.J.: Damage detection using outlier analysis. J. Sound Vib. 229(3), 647–667 (2000)
Wang, D., Song, H., Zhu, H.: Numerical and experimental studies on damage detection of a concrete beam based on PZT admittances and correlation coefficient. Constr. Build. Mater. 49, 564–574 (2013)
Harmouche, J., Delpha, C., Diallo, D.: Incipient fault detection and diagnosis based on Kullback-Leibler divergence using principal component analysis: Part I. Signal Process. 94, 278–287 (2014)
Entezami, A., Shariatmadar, H., Mariani, S.: Fast unsupervised learning methods for structural health monitoring with large vibration data from dense sensor networks. Structural Health Monitoring (in press)
Sharma, V., Parey, A.: Frequency domain averaging based experimental evaluation of gear fault without tachometer for fluctuating speed conditions. Mech. Syst. Signal Process. 85, 278–295 (2017)
Entezami, A., Shariatmadar, H.: Structural health monitoring by a new hybrid feature extraction and dynamic time warping methods under ambient vibration and non-stationary signals. Measurement 134, 548–568 (2019)
Yi, T.-H., Li, H.-N., Zhang, X.-D.: A modified monkey algorithm for optimal sensor placement in structural health monitoring. Smart Mater. Struct. 21(10), 105033 (2012)
Castanié, F.: Spectral Analysis: Parametric and Non-Parametric Digital Methods. Wiley, Hoboken (2013)
Hayes, M.H.: Statistical Digital Signal Processing and Modeling. Wiley, New York (1996)
Candy, J.V.: Model-based Signal Processing, vol. 36. Wiley, New York (2005)
Bisgaard, S., Kulahci, M.: Time Series Analysis and Forecasting by Example. Wiley, Hoboken (2011)
Stoica, P., Moses, R.L.: Introduction to Spectral Analysis, vol. 1. Prentice Hall, Upper Saddle River (1997)
Bos, R., De Waele, S., Broersen, P.M.: Autoregressive spectral estimation by application of the Burg algorithm to irregularly sampled data. IEEE Trans. Instrum. Meas. 51(6), 1289–1294 (2002)
Gray, A., Markel, J.: Distance measures for speech processing. IEEE Trans. Acoust. Speech Signal Process. 24(5), 380–391 (1976)
Dyke, S. J., Bernal, D., Beck, J., Ventura, C.: Experimental phase II of the structural health monitoring benchmark problem. In: Proceedings of the 16th ASCE Engineering Mechanics Conference (2003)
Perez-Ramirez, C.A., Amezquita-Sanchez, J.P., Adeli, H., Valtierra-Rodriguez, M., Camarena-Martinez, D., Romero-Troncoso, R.J.: New methodology for modal parameters identification of smart civil structures using ambient vibrations and synchrosqueezed wavelet transform. Eng. Appl. Artif. Intell. 48, 1–2 (2016)
Acknowledgment
The authors are extremely grateful to the IASC-ASCE Structural Health Monitoring Task Group, for sharing the experimental datasets of the four-story steel structure.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Entezami, A., Mariani, S. (2021). Early Damage Detection for Partially Observed Structures with an Autoregressive Spectrum and Distance-Based Methodology. In: Rizzo, P., Milazzo, A. (eds) European Workshop on Structural Health Monitoring. EWSHM 2020. Lecture Notes in Civil Engineering, vol 128. Springer, Cham. https://doi.org/10.1007/978-3-030-64908-1_40
Download citation
DOI: https://doi.org/10.1007/978-3-030-64908-1_40
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-64907-4
Online ISBN: 978-3-030-64908-1
eBook Packages: EngineeringEngineering (R0)