
Abstract
The convex hull problem has practical applications in mesh generation, file searching, cluster analysis, collision detection, image processing, statistics, etc. In this paper, we present a novel pruning-based approach for finding the convex hull set for 2D and 3D datasets using parallel algorithms. This approach, which is a combination of pruning, divide and conquer, and parallel computing, is flexible to be employed in a distributed computing environment. We propose the algorithm for both CPU and GPU (CUDA) computation models. The results show that ConcurrentHull has a performance gain as the input data size increases. Providing an independently dividable approach, our algorithm has the benefit of handling huge datasets as opposed to other approaches presented in this paper which failed to manage the same datasets.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Computing the convex hull of a set of points is one of the substantial problems in computer graphics. The convex hull of a set of points P is the smallest convex polygon/polyhedron that contains the points and is denoted by CH(P). Imagine using needle pins on a surface to represent the points, the convex hull can be visualized by wrapping a rubber band around these needles [4]. Given a set of n points in a plane, the convex hull of these points is the set of points which are located on the perimeter of the smallest area that contains all the points. The convex hull of a set of 3D points P is the smallest convex polyhedron containing all points of the set P.
The complexity of the algorithms are based on the total number of points (n) and the number of points that create the hull (h). Among these algorithms, the most popular ones are the “Graham scan” algorithm and the “divide-and-conquer” algorithm [9].
The \(O(n\log n)\) complexity of Graham Scan algorithm is emanated from the radial sort of the points. The algorithm starts with one of the points that is sure to be in the convex set which is called P. For this purpose it will find the point with the lowest y-coordinate, if there exists more than one point with the minimum y-coordinate then it will find the one with the lowest x-coordinate. This can be done in O(n) time. Then the rest of the nodes will be sorted by the angle they make with P and x-axis. The next step is figuring out if the next point is a right turn or a left turn regarding its preceding point and P. If it is a right turn (clockwise), then it means that \(p_2\) is not a part of the convex hull and it will be swapped with \(p_3\) and the algorithm will proceed to the next set of points. This process will end when it reaches the starting point P.
2 Related Work
The research on implementing parallel algorithms is scarce. In 1988, Miller et al. introduced a parallel solution for solving the convex hull problem which given a sorted set of points and a machine with \(\theta (n)\) processors can solve it in \(\theta (\log n)\) [8]. However the high amount of required processors reduces the practicality of this algorithm. Blelloch et al. introduced a new definition and analysis of the configuration dependence graph for the randomized incremental convex hull algorithm and showed it is inherently parallel with O(logn) dependence depth [3].
The other approach is using GPU processing power for solving the problem. Jurkiewicz et al. introduced a CUDA algorithm which applies quick sort on the points and solve the problem in \(O(k\log g)\). \(g=\frac{n}{p}\) input size of the problem per SIMD-processor and \(k=\frac{n}{U}\) input size of the problem per scalar processor [6]. GHull is a 3D CUDA-based convex hull algorithm that was proposed by Gao et al. which is up to 10x faster than the fastest CPU convex hull software, QuickHull [5]. CudaHull is another 3D convex hull algorithm which is based on the QuickHull approach [10].
Hybrid GPU-CPU is another approach to the convex hull problem Tang et al. presented a hybrid CPU-GPU algorithm to compute the convex hull of points in three or higher dimensional spaces [11]. The GPU is used to remove the points that do not lie on the boundary, then the CPU computes the convex hull for the remaining points.

A demonstration of the 2D ConcurrentHull
Here we explain our approach for 2D and 3D convex hull and for each of them, we first describe the approach for CPU-based implementation and then the CUDA implementation approach. We will then discuss the benchmarking task and how our algorithm performed against other algorithms.
3 ConcurrentHull
Our approach is based on highly parallel pruning of the interior points. The data is partitioned into an equal sized grid. The pruning is done by the crawlers. Each crawler can perform individually from other crawlers. A crawler starts from a partition in a given direction and tries to find the first valid partition and then it halts. We will discuss the implementation of the 2D and 3D ConcurrentHull algorithm for CPU and GPU.
4 2D Convex Hull
The following steps are a high-level presentation of how we are going to find the convex hull of 2D points:
-
Loading the data and partitioning them using a grid.
-
Pruning the partitions using crawlers.
-
Finding convex hulls of remaining partitions and removing the points inside their convex hulls.
-
Calculating the final convex hull using the remaining point.
Figure 1 shows a demonstration of 2D ConcurrentHull algorithm.
4.1 CPU 2D Convex Hull
Calculating the convex hull for a set of 2D points starts with loading the points and finding their extreme X and Y values. In the next step, the plane will be divided to a \(k\times k\) grid. Each grid cell is called a partition. The partition which is located on i and j coordinates of the grid is represented by \(\rho _{k\times i + j}\). A valid partition is a partition that we assume has at least one point in the convex hull, but there might be no point inside a valid partition that is a part of the final convex hull. In Fig. 1 the example set of points has been divided into a \(12\times 12\) grid.

The figure shows the directions for three 2D crawlers of a starting point. Each arrow represents one crawler’s direction.
In order to prune the partitions, we use crawlers. A crawler is a piece of code which crawls from a starting point towards a defined direction with a width of one partition. It checks if any partitions on its path have any points inside them. It will mark the first non-empty partition that it finds as valid partition and stops crawling. Three crawlers start from each partition of each side of the grid, one perpendicular, the other two in the direction of the grid diagonals (Fig. 2). The pruning is done using \(12 \times (k-2)+4\) crawlers which run in parallel. Since each corner of the grid only has one diagonal crawler, we have \(3\times (k-2)\) crawlers for each side of the grid (excluding the corners) and 4 crawlers for the corners. Using crawlers we will find valid partitions and the rest of the partitions will be pruned. Figure 1b shows the sample pruned partitions, the white partitions will be removed. Algorithm 2 shows how a crawler works.
Convex hull for each partition is computed in parallel and the points inside the convex hull are removed. If a partition has less than four points, it will be left untouched as a valid partition (note that at least three points are needed to compute a convex hull). Each partition’s points is passed to a thread and each thread finds the \(CH(\rho _{v})\) using the Quick Hull algorithm. Points inside the convex hulls of the partitions can be removed as they are already surrounded by a convex hull inside the final convex hull. Figure 1c shows the calculated convex hull for the valid partitions. Yellow points will be removed from the set. The final convex hull will be computed using the remaining points.
The justification for using partitions and crawlers for pruning instead of using the Quick Hull algorithm in the first step is that the Quick Hull algorithm finds the points that lie inside the triangle [2] by comparing all of the points with the three lines that are created by the extreme points and although the operation is of O(n), it is still a time-consuming task. On the other hand, to prune the points using partitions and crawlers, we only do one comparison in each crawler’s step (partition.points.size()>0) which is faster and in the worst case is of \(O(12k^2)\)in which k is a constant.
Lemma 1
The final convex hull points are inside the valid partitions and none of the points from the final convex hull can be inside the pruned partitions.
Proof
We prove this lemma by contradiction. Consider a set of 2D points P divided to \(k \times k\) partitions. We denote \(\bigcup _{v} CH(\rho _{v})\) as \(CH'\). If there exists a pruned point \(p_p \in CH(P)\) and \(P_p \notin CH'\). This means \(p_p\) is outside \(CH'\). If it is outside the \(CH'\), crawlers have missed the partition (\(\rho _{p}\)). If there is a valid partition on the right of \(\rho _{p}\), because we assumed \(p_p\) is outside the \(CH'\) there has been a crawler crawling from left to right that picked the partition on the right of \(\rho _{p}\) as a valid partition, but since crawlers stop when they find the first partition with at least one point inside, it should have stopped when it reached \(\rho _{p}\) and it is a contradiction to the crawler definition. The same case applies to the other directions around \(\rho _{p}\).
For the points inside the partitions convex hulls, they cannot be outside the CH(P) because if they are outside CH(P) they should also be outside of the convex hull of a partition, which is a contradiction to the assumption. \(\square \)

4.2 GPU 2D Convex Hull
We apply the CPU approach for CUDA with some minor modifications. A CUDA kernel is responsible for partitioning the points. After copying the points data to the GPU memory, n threads assign the points to their partitions. Based on the thread ID, each thread picks one point and assign it to its appropriate partition using side size and extreme points values.

ConcurrentHull 3D process demonstration.
GPU crawlers use the same approach as the CPU crawlers. \(12 \times k\) threads run the crawler kernel, each thread crawls in its direction and marks its appropriate valid partition.
To compute the convex hull on GPU, we modified CudaChain algorithm [7] to fit our needs. The points data in GPU memory are shared among CudaChain instances which helps algorithm to run faster without the need to make multiple copies of the data. After computing the convex hull of the partitions and removing the points inside them, the remaining points will be used to calculate the final convex hull.
5 3D Convex Hull
Applying the ConcurrentHull idea to 3D points can be done using the same steps as the 2D problem but with minor modifications to meet the 3D problem requirements. We will first describe the CPU algorithm and then the GPU one.

5.1 CPU 3D Convex Hull
To apply the partitioning, we project a cubic 3D grid on the input data which is a set of 3D points. The grid bounding B is defined by the maximum of furthest points based on X, Y, and Z coordinates. Once we found B, the grid will have \(k \times k \times k\) cells each of size \(\frac{B}{k}\) and starts from \((x_s,y_s,z_s)\) where \(x_s = \min _{\forall p \in P} p.x\), \(y_s = \min _{\forall p \in P} p.y\), and \(z_s = \min _{\forall p \in P} p.z\).
Similar to 2D crawlers, 3D crawlers also have a starting partition and a direction to crawl. Each of the six sides of the cubic grid has \(k^2\) partition which are the starting partitions of the crawlers. From each starting partition, nine crawlers will be initiated. The adjacent layer of the starting partition has nine partitions that are neighbors of the starting partition which define the directions from starting partitions center towards these partitions centers. In other words we define the direction using a vector \(\mathbf {d}=(u,v,z)\), u,v and z are corresponding to X, Y, and Z directions. Depending on the side of the grid which the starting partition is located on, one of the elements of \(\mathbf {d}\) is a fixed value (1 or −1) and the other 2 elements can be −1, 0, or 1, which means we have \(3^2\) different directions to cover. Figure 4 shows the directions for a sample starting partition which is located on the bottom of the grid. Overall, \(54 \times k^2\) crawlers will be working on the grid to find the valid partitions.

3D crawler directions for a sample starting point

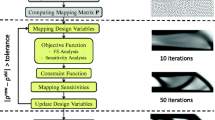
Finding the convex hull of the Stanford Bunny using ConcurrentHull
After finding the partitions, 3D quick hull will be used to find the partitions’ convex hulls and the same as the 2D algorithm, the points inside the convex hulls will be removed. Note that the partitions with less than four points will also be considered valid partitions. Using the remaining points, the final convex hull for the input problem will be calculated.
Lemma 2
The final convex hull points are inside the valid partitions and none of the points from the final convex hull can be among the pruned points.
Proof
The proof is the same as 2D proof. \(\square \)
5.2 GPU 3D Convex Hull
To partition the input data on the GPU, CPU 3D convex hull partitioning logic is used with the same approach as the 2D partitioning kernel. Each thread is responsible for partitioning one point. Each crawler uses one thread to find its valid partition. The points data is shared among the threads. After finding the valid partitions, gHull [5] will be used to calculate the convex hull of the partitions. Figure 3 shows an example of the 3D algorithm process on a ball dataset and Fig. 5 shows the process for the Stanford bunny.
6 Benchmark
Both Synthetic data and real-world data were used to perform the benchmark tests. We performed the benchmarks for CPU 2D, CPU 3D, GPU 2D, and GPU 3D algorithms. The real-world benchmarks are performed for the 3D data as well as the synthetic data. Synthetic benchmarks are performed for the 2D algorithms. Further, the benchmarks for different values of k are plotted. The average values for the synthetic benchmarks are available in Table 1 and Fig. 7 shows plots of the average synthetic benchmarks. For each dataset or k value the benchmarks are performed three times and are averaged to minimize the errors in measurements.

Four different synthetic shapes used for 3D benchmark testings.
6.1 2D Benchmark
Synthetic. Four distribution of synthetic data were generated: Square with a thickness of 1%, Square uniform distribution, Circle with a thickness of 1%, Disk uniform distribution.
6.2 3D Benchmark
Synthetic. Four distribution of synthetic data were generated (Fig. 6): Cube with uniform distribution, Ball with uniform distribution, Sphere with thickness of 1%, Gaussian distribution.

Average benchmark times (seconds) for different input sizes.
Real-World. The data for the 3D real-world benchmarks were gathered from LiDAR scans of the Robotic 3D Scan Repository [1].
7 Results
We used a computer with a Core i7 (i7-8700K) CPU, 32GB of RAM, and a NVIDIA GTX 1080 Ti GPU with 11 GB GDDR5X memory to run the benchmarks.

Effect of k value for \(10^8\) 3D points with different distributions using ConcurrentHull CPU 3D. The X axis shows side size for partitioning. qh stands for qhull times.

Effect of k value for \(10^8\) 2D points with different distributions using ConcurrentHull CPU 2D. The X axis shows side size for partitioning. qh stands for qhull times.
For 2D and 3D comparisons, the input points are randomly distributed point sets generated on a square and a cube respectively. To evaluate the performance of ConcurrentHull for 2D and 3D CPU algorithms, inputs are benchmarked against Qhull. For GPU tests, 2D inputs are benchmarked against CudaChain, while 3D inputs are benchmarked against gHull. Convex hull execution time was used as the benchmark measure. Figure 7 shows the benchmark results.

Real world 3D data CPU algorithm. qh stands for qHull times.

Real world 3D data GPU algorithm. gh stands for gHull times.
As the results show, on large inputs our approach performs much faster than other approaches, while for a small number of inputs, our approach does not show an improvement. This behavior is the result of partitioning overhead for a small number of points, whereas for a large number of points the overhead is negligible and the partitioning and pruning significantly improves the performance.
The other noteworthy outcome is that for huge input sizes (>10\(^8\)), all three other algorithms could not produce results due to memory management issues. Since our method first removes the unnecessary points, it can handle much larger input point sets.
The effect of changing the value of k is demonstrated in Figs. 8 and 9 for multiple distributions of 2D and 3D datasets. In the charts, k = 0 means using gHull directly. As results the suggest, increasing k will reduce the execution time up to a point (optimal k), after that the performance will deteriorate.
7.1 Limitations and Future work
One of the disadvantages of partitioning is that we do not know the optimum size for the grid (k). If we choose a small grid size, it can be ineffective because all of the points will end up in the valid partitions if we choose a large grid size we can end up with too many partitions which can compromise the performance. Partition pruning can underperform if invalid partitions are all empty or have a small number of points in them (Figs. 10 and 11).
For future work, we would like to investigate the application of partitioning and crawlers on the dynamic convex hull problem. Moreover, utilizing convex hull merging algorithms might help ConcurrentHull to achieve a better performance. In this case, instead of calculating the convex hull for the aggregated valid partitions pruned points, the already calculated convex hull of each partition can be merged with the others. Finding optimal k requires further investigation of the problem which is an opportunity for future work.
8 Conclusions
This paper introduces ConcurrentHull, a fast convex hull computation technique based on pruning. The results show that the ConcurrentHull algorithm can outperform other algorithms on large enough set of points. For instance, on an input of \(10^8\) 2D points, our approach outperformed Qhull by a speedup of 42 times on synthetic data. This approach benefits from discarding of the points which certainly are not a part of the convex hull using a highly parallel algorithm. Further, the inherent attributes of crawlers help ConcurrentHull achieving a better memory management on large sets of points (>10\(^8\)).
References
Robotic 3D Scan Repository (2020). http://kos.informatik.uni-osnabrueck.de/3Dscans/
Barber, C.B., Dobkin, D.P., Huhdanpaa, H.: The quickhull algorithm for convex hulls. ACM Trans. Math. Softw. (TOMS) 22(4), 469–483 (1996)
Blelloch, G.E., Gu, Y., Shun, J., Sun, Y.: Randomized incremental convex hull is highly parallel. In: Proceedings of the 32nd ACM Symposium on Parallelism in Algorithms and Architectures, pp. 103–115 (2020)
De Berg, M., Van Kreveld, M., Overmars, M., Schwarzkopf, O.C.: Computational geometry. Computational Geometry, pp. 1–17. Springer, Berlin (2000)
Gao, M., Cao, T.T., Nanjappa, A., Tan, T.S., Huang, Z.: gHull: a GPU algorithm for 3D convex hull. ACM Trans. Math. Softw. (TOMS) 40(1), 1–19 (2013)
Jurkiewicz, T., Danilewski, P.: Efficient quicksort and 2D convex hull for CUDA, and MSIMD as a realistic model of massively parallel computations (2011)
Mei, G.: Cudachain: an alternative algorithm for finding 2D convex hulls on the GPU. SpringerPlus 5(1), 696 (2016)
Miller, R., Stout, Q.F.: Efficient parallel convex hull algorithms. IEEE Trans. Comput. 37(12), 1605–1618 (1988)
o’Rourke, J.: Computational Geometry in C. Cambridge University Press, Cambridge (1998)
Stein, A., Geva, E., El-Sana, J.: Cudahull: fast parallel 3D convex hull on the GPU. Comput. Graph. 36(4), 265–271 (2012)
Tang, M., Zhao, J.Y., Tong, R.F., Manocha, D.: GPU accelerated convex hull computation. Comput. Graph. 36(5), 498–506 (2012)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Masnadi, S., LaViola, J.J. (2020). ConcurrentHull: A Fast Parallel Computing Approach to the Convex Hull Problem. In: Bebis, G., et al. Advances in Visual Computing. ISVC 2020. Lecture Notes in Computer Science(), vol 12509. Springer, Cham. https://doi.org/10.1007/978-3-030-64556-4_46
Download citation
DOI: https://doi.org/10.1007/978-3-030-64556-4_46
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-64555-7
Online ISBN: 978-3-030-64556-4
eBook Packages: Computer ScienceComputer Science (R0)