
Abstract
The load capacity of the front wheel loader is equal to half the maximum tipping load in the bucket. Therefore, a stability assessment is very important at the design stage. The existing graphical method used to assess the static stability of the loader is very time-consuming and is susceptible to drawing errors. The authors suggest replacing the graphical method with an analytical one. The calculation results revealed that the displacement of the horizontal hinge (balancer) along the frame of the machine does not affect its stability. The loader stability depends solely on the balancer hinge orientation. The mathematical model presented in the article was used in the design of the PK-5 loader manufactured by the Chelyabinsk Tractor Plant. The loader PK-5 has an articulated frame with a combined horizontal and vertical hinges. The use of a combined hinge simplifies the design of the frame and increases the unification of machines based on it. The change in the orientation of the balancer allowed increasing its carrying capacity by 20–30%. The orientation of the balancer completely changed the mechanics of tipping, which increased the safety of the driver.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Front loader
- Articulated frame
- Loader loading capacity
- Rear balancing frame
- Front balance frame
- Rollover stability
1 Introduction
Articulated wheel loaders are widely used in various sectors of the national economy of all countries of the world. Loading and unloading operations account for 40 … 45% of the total labor costs in agriculture [1], 24% in housing, 47% in road construction, 3% in utilities, 3% in the production of building materials [2], 2% in mining industry [3].
The technological cycle of a front-end loader consists of 57–77% of curved movement (Fig. 1). Therefore, maneuverability is a priority when working in tight spaces. This problem is solved by choosing the right motion control scheme when designing a machine [4].

Front loader operation examples
The presence of cargo in the ladle leads to an increase in the load of the front wheels. This entails an increase in wheel arches, an increase in track and turning radius, as well as complicating steering with steered front wheels. These shortcomings contributed to the emergence and widespread use of the articulated frame scheme for medium and heavy front loaders [5]. The hinged frame allows the use of heavy-duty wheels without increasing the overall dimensions of the machine and greatly simplifies the steering control system [6].
The structural scheme of the hinge frame of the loader contains a vertical and horizontal hinge (Fig. 2). These hinges provide rotation of the semi-frames relative to each other in two planes. The vertical hinge rotates one half frames relative to another in the horizontal plane. The folding process of the loader is carried out by hydraulic cylinders.

Examples of articulated frames with rear balancer (a) combined hinge; (b) spaced hinge
The horizontal hinge allows one part of the frame to rotate relative to the other in a vertical plane and it is called the balancer. One part of the frame contains a hinge body and is called unbalanced. The other part contains the axis of the hinge and is called the balancer. The balancing part of the frame has the ability to rotate around this axis in a transverse vertical plane.
The vertical hinge and horizontal hinge are combined hinge sometimes (Fig. 2a). The combination hinge greatly simplifies the design of the frame and allows the use of a modular design, which increases the degree of unification of products [7, 8].
The production of special engineering machines is not always justified in Russia. Engineering plants are forced to expand the range of products by creating a family of different special machines on a single energy base. For example, a wheel loader based on the K-700 agricultural tractor was designed at the Kirov Tractor Plant. The Chelyabinsk Tractor Plant began production of a family of wheeled vehicles with articulated frames for various purposes: a vibration roller, compactor, and front-end loader.
Agricultural articulated tractors K-700 and T-150, working with rear mounted implements, have a rear balancer. Vibration rollers and compactors always have a front balancer. Wheel loaders have different structural schemes today. Some tractor and automobile plants create loaders based on existing tractors. For example, the Amkodor Company produces specialized loaders with a rear balancer. For example, front-end loader K-156 and TO-25 have a front balancer [9]. Which scheme is better?
The aim of the research is to study the influence of the structural scheme of the articulated frame on the loading capacity of the loader, the force of normal wheel reactions from the ground and the safety of the driver.
The object of study is a structural scheme of an articulated frontal loader PK-5 manufactured by the Chelyabinsk Tractor Plant.
The main characteristic of the loader is its rated load capacity. GOST defines the nominal carrying capacity of the articulated front loader as half the tipping load in the ladle, provided that the half frames are fully folded and the ladle is maximally full. Thus, the performance of the loader significantly depends on the structural scheme determining its static stability.
2 Analysis of Previous Studies
The graphic method for assessing the static stability of the articulated joint developed by L.A. Goberman has been widely used at present in Russia [10, 11]. The essence of the method is to build supporting triangles for the balancing and unbalanced parts of the articulated machine, drawing the position of the center of gravity of the machine and the point of application of the tipping force (Fig. 3). The sides of the supporting triangles are axes of tipping.

Design of the supporting triangles, a for the front balancing part, b for the rear balancing part, c for the front unbalanced part, d for the rear unbalancing part
The moment of stability and the tipping moment over are calculated after measuring the necessary force shoulders [12]. The stability moment is calculated as the product of gravity on its shoulder relative to the tipping axis. The tipping moment is calculated as the product of the maximum load in the ladle outside the supporting contour of the machine on its shoulder. The loss of stability is determined when the stability moment equals the tipping moment.
Graphic method has several disadvantages [13]:
-
The method is very time-consuming, since the supporting triangles are built separately for each folding angle of the machine;
-
Construction is performed only for limiting equilibrium states, and working positions are evaluated only by the safety factor. This approach does not give the full information content of the obtained solution;
-
Drawing errors give a significant error;
-
The method requires a large amount of computation and drawing for each position;
-
The method calculates only the maximum tipping force and does not show the load distribution between the wheels.
3 Mathematical Model
The authors proposed an analytical method of the static stability of the front-end loader structural schemes on the laws of mechanics. The mathematical model they constructed does not have the drawbacks listed above [14,15,16].
The static stability of the loader was determined by the condition of ultimate balance. The equilibrium of an arbitrary system of forces is satisfied provided that the principal vector \( \vec{R}_{0} \) and principal moment \( \vec{M}_{0} \) relative to an arbitrary center are equal to zero:
A scheme of the forces acting on the loader is shown in Fig. 4. The loader is loaded with a system of parallel gravity when working on a horizontal surface.

Forces scheme
Equilibrium conditions represent three equations:
\( \mathop \sum \nolimits F_{z} = 0 \)—The sum of the projections of all forces on the vertical axis (the axis is parallel to the forces);
\( \mathop \sum \nolimits M_{x} = 0, \) \( \mathop \sum \nolimits M_{y} = 0 \)—The sum of moments relative to two horizontal axes.
The number of unknown normal reactions from the ground is equal to the number of wheels. We designated the four unknowns as \( N_{1} , \) \( N_{2} , \) \( N_{3} , \) \( N_{4} \) and compiled an additional fourth equation of internal hinge. The absence of friction in this hinge is a basic assumption. The moment equation was written for the rear half frame or for the front half frame depending on the orientation of the balancer. The mathematical model of the static stability of the front loader, taking into account the given dimensions (Fig. 5), has the form:

Loader design dimensions
Additional equation for the front balancer scheme:
Additional equation for the rear balancer scheme:
where \( B \) is loader track; \( B_{g} \) is ladle width; \( L_{1} \) is the distance from the axis of the front wheels to the ladle; \( L_{2} \) is the distance from the axis of the front wheels to the vertical folding hinge; \( L_{3} \) is the distance from the vertical folding hinge to the axis of the rear wheels; \( \Delta a \) is distance from the center of mass of the rear half frame to the axis of the rear wheels; \( \Delta b \) is distance from the center of mass of the front half frame to the axis of the front wheels.
4 Research Results
The proposed mathematical model (2–6) allowed you to calculate direct problem and inverse problem. The direct task is to determine the maximum tipping force in the ladle \( G_{g \hbox{max} } \). An analytical sign of the beginning of a rollover is the zero reaction of the rear outer wheel \( N_{2} = 0 \). Solving the direct problem is equivalent to estimating the load capacity of the loader [17]. The solution of Eqs. (2–6) allows you to compare different structural schemes of an articulated loader and analyze the effect of linear dimensions on load capacity.
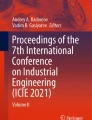
A wheel loader with a rear balancing frame is more stable than for a wheel loader with a front balancing frame at all folding angles (Fig. 6). Its maximum tipping force is 50% greater at a folding angle of 30° and 60% greater at a folding angle of 40°. The performance of a wheel loader is determined by its carrying capacity equal to half the maximum tipping force. Therefore, changing the orientation of the complex hinge from the front balancer to the rear balancer increases the productivity of the loader by 25–30%.

Dependence of the maximum tipping force \( G_{{g { \hbox{max} }}} \). in the bucket on the folding angle αo
Analysis of Eqs. (4–5) showed that moving the balancer hinge along the loader frame does not affect the value of the maximum tipping load, all other things being equal. The value of the maximum tipping load depends only on the orientation of the balancer.
The inverse problem is to determine the normal wheels reactions at a known load in the ladle. The inverse problem does not solve the problem of stability and load capacity of the loader. However, she is relevant in the analysis of real operating modes. Loads on the wheels of the loader may differ several times when driving in the folded position. This contributes to different operating conditions and different wear of pneumatic tires. The dependence of normal wheel loads on the folding angle is different for a scheme with a rear balance frame and a scheme with a front balance frame (Fig. 7).

Dependence of wheel reactions N on the folding angle αo using a the front counterweight and b the rear counterweight
The calculation of the inverse problem was performed using the PK-5 loader manufactured by the Chelyabinsk Tractor Plant as an example. The result revealed that wheel loads significantly depend on the structural balancing scheme.
The rollover static stability determines not only the efficiency of the machine but also the safety of the driver, since the rollover mechanics for various structural balancing schemes is fundamentally different [18].
The loader with rear balancing frame flips around the axis of the front wheels. The rear wheels are discharged and take off from the ground at the same time. The cab of the articulated loader is usually mounted on the rear frame, so the driver responds adequately to the loss of stability. The loader with front balancer frame allows the rear frame to rotate relative to the longitudinal axis. This causes the outer rear wheel to separate from the ground. The loader’s cab tilts in two planes at once: longitudinal and transverse. Therefore, the safety of the driver of the loader with the front balancer frame is worse than that of the loader with the rear balancer frame. For example, the B138C loader manufactured by the Chelyabinsk Plant of Road-Building Machines based on a grader with the front balancing frame lost stability when folding on a horizontal surface.
The proposed technique was used in the design of the PK-5 loader manufactured by the Chelyabinsk Tractor Plant. Additionally, the impact of centrifugal force and load displacement in the bucket was evaluated. It has been established that centrifugal force increases the stability of the articulated machine with any structural scheme of loader. Lateral displacement of the load in the bucket only leads to the redistribution of loads between the front wheels, while maintaining effort on the rear wheels.
5 Conclusions
-
The proposed mathematical model made it possible to solve the direct and inverse problems.
-
The capacity of the loader with the rear balancing frame is 25–30% higher than the capacity of the loader with the front balancing frame.
-
Moving the balancer axis along the loader frame does not affect its stability. Only the orientation of the balancer matters.
-
The distribution of normal loads between the wheels can vary by a factor of 2–3 and substantially depends on balancer orientation.
-
The rollover mechanics and driver safety are determined by the structural scheme (balancer orientation).
-
Lateral displacement of the load in the bucket only leads to the redistribution of loads between the front wheels, while maintaining effort on the rear wheels.
-
Centrifugal force increases the stability of the articulated machine with any structural scheme of loader.
References
Latorre-Biel JI, Arana I, Ballesteros T, Pintor JM, Alfaro JR (2016) Front end loader with automatic levelling for farm tractors. Biosys Eng 148:111–126. https://doi.org/10.1016/j.biosystemseng.2016.05.011
Manzone M (2017) Loader performance during woodchip loading. Biomass Bioenerg 98:80–84. https://doi.org/10.1016/j.biombioe.2017.01.016
Varlamova SA, Volodina YI, Zatonskiy AV, Yazev PA (2019) Simulation model for planning mining operations. Min Inf Analyt Bull 10:214–222. https://doi.org/10.25018/0236-1493-2019-10-0-214-222
Roskam R, Dobkowitz D (2015) Modeling of a front end loader for control design. In 23rd Mediterranean Conference on Control and Automation 7158788:442–447. https://doi.org/10.1109/med.2015.7158788
Ananthpur CR, Saravanan M (2019) An investigation on articulation dynamic loads of construction equipment. SAE Technical Papers. https://doi.org/10.4271/2019-26-0103
Pazooki A, Rakheja S, Cao D (2014) A three-dimensional model of an articulated frame-steer vehicle for coupled ride and handling dynamic analyses. Int J Veh Perf 1(3–4):264–297. https://doi.org/10.1504/IJVP.2014.069107
Pozin BM, Troyanovskaya IP, YeV Taborskikh (2015) Static stability of articulated front loader. J Tract Agric Mach 1:25–27
Troyanovskaya IP, Grebenshchikova OA (2013) The analysis of constructive schemes of face-to-face loaders from the point of view of theoretical mechanics. News Int Acad Agric Educ 16(4):271–276
Mrochek VI, Mrochek TV, Puzikov AI (2017) Analysis of front-end loader market in Russia. Bull Belarusian-Russian Univ 3(56):83–87
Goberman LA, Stepanyan КV, Yarkin AA, Zalensky VS (1979) Theory, design and calculation of construction and road machines. Engineering, Moscow
GOST RD 50–233 (1981) Reliability in technology. Safety assessment of wheeled and tracked rollover vehicles. Characteristics of dynamic and static stability. Publishing house of standards, Moscow
Arote P, Sudarsanam S, Muthuraman M, Kharade P (2019) The dynamic stability index calculator for agricultural tractors equipped with front end loader. AIP Conf Proc 2148:030031. https://doi.org/10.1063/1.5123953
Dasgupta K, Chattopadhyay A (1990) Stability analysis of an articulated front end loader. An analytical approach. Min Technol 72(836):179–181
Yao Z-W (2013) Study on the rollover stability of articulated steer engineering vehicle. College of Mechanical Science and Engineering. Jilin University, Changchun
Li X, Wang G, Yao Z, Yang Y (2014) Research on lateral stability and rollover mechanism of articulated wheel loader. Math Comput Model Dyn Syst 20(3):248–263. https://doi.org/10.1080/13873954.2013.825871
Zhang T (2014) Analysis of steering stability characteristics of articulated vehicles. College of Mechanical Engineering, Taiyuan University of Science and Technology, Taiyuan
GOST 28635 (1990) Earth-moving machinery. Nominal load capacity of tracked and wheel loaders. Publishing House of Standards, Moscow
Abubakar MS, Ahmad D, Akande FB (2010) A review of farm tractor overturning accidents and safety. Pertanika J Sci Technol 18(2):377–385
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Troyanovskaya, I.P., Shepelev, S.D. (2021). Design of Agricultural Loader with Articulated Frame. In: Radionov, A.A., Gasiyarov, V.R. (eds) Proceedings of the 6th International Conference on Industrial Engineering (ICIE 2020). ICIE 2021. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-030-54814-8_17
Download citation
DOI: https://doi.org/10.1007/978-3-030-54814-8_17
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-54813-1
Online ISBN: 978-3-030-54814-8
eBook Packages: EngineeringEngineering (R0)