
Abstract
Planning of automobile terminal operations is a complex task, which is highly affected by volatile demand fluctuations and unforeseen dynamic events. Autonomous control concepts already showed promising results regarding the terminals logistics performance. Especially, in highly dynamic and complex settings autonomous control copes better with undesired dynamics than conventional yard planning approaches. In this regard, this paper focuses on the influence of structural complexity on the performance of an autonomously controlled automobile terminal. It addresses the terminals size and the vehicle volume as parameters of structural complexity. By using a discrete event simulation model of a generic terminal scenario, this paper analyses the logistics performance of an autonomous control strategy. It shows that autonomous control performs best in situations with a high degree of structural and dynamic complexity.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
An increasing trend in vehicle shipment volumes in global vehicle production and distribution networks can be observed. Within these networks, automobile terminals play a key role for the fulfillment of transshipments and technical services related to the customers’ demands. Usually automobile terminals offer handling processes (i.e. loading and unloading of cars from transport carriers), storage processes and technical service processes, which are directly triggered by the terminals customers (OEMs) [1]. This close interrelation with OEMs naturally affects yard planning processes of the automobile terminal. On the one hand, terminals need information about specific planned movement of cars (e.g., cars allocated to particular ship). On the other hand the terminals planning is based on order neutral long-term forecasts. Due to these characteristics (order neutral and order specific planning aspects) the role of automobile terminals in the entire automotive supply chain can be compared to a classical decoupling point with parallel occurring push and pull processes [2]. Generally, decoupling allows increasing flexibility of supply chains (e.g., terminals may act as short-term buffer of production plant). However, this leads to a higher the complexity for terminals yard planning tasks. In general, yard master planning aims at minimizing driving distances (the distance between the point of car entrance, storage area and its exit point) of cars on the terminal. In order to meet this goal classical master planning approaches assign groups of cars to predefined parking areas (e.g. sorted by manufacturer, model and destination) [3]. In less volatile situation, this assignment leads to good results regarding the realized driving distance. Increasing dynamics (e.g., caused by usage of flexibility potentials) affects this long term orientated planning negatively. It is prone to forecast deviations and unforeseen events [4, 5]. In this context first autonomous control approaches showed promising results regarding the yard assignment under dynamic and volatile conditions in automobile terminals [6, 7]. According to the concept of autonomous control an improved handling of dynamics in systems with high degree of structural complexity is a key element [8]. This paper focuses on the applicability of autonomously controlled processes at automobile terminals. It addresses the impact of increasing structural complexity on autonomous control methods performance. For this purpose, Sect. 2 gives an overview about the planning problems related to automobile terminals. On this basis, Sect. 3 describes the concept of autonomous control and presents first terminal related applications. In order to allow a structured analysis of terminals with different degrees of structural and dynamic complexity, Sect. 4 introduces a scalable generic terminal model and its implementation in a discrete event simulation. Subsequently, Sect. 4 presents an existing autonomous control and a conventional planning method as well as their implementation into the scalable terminal model. Section 5 depicts the simulation results and Sect. 6 gives an outlook with further research directions.
2 Automobile Terminal Planning Processes
Planning tasks of automobile terminals are closely related to the physical movements of the vehicles. Figure 1 depicts the elements of the material flow and maps relevant planning tasks to the physical movement of cars according to [3]. The planning tasks can be differentiated according to their specific time scale. According to Fig. 1 yard master planning plays a central role in this cascaded planning process. This task comprises the assignment of incoming car volumes to suitable yard areas. On the one hand, this process aims at increasing the utilization of parking areas and on the other hand on minimizing driving distances of cars on their route between unloading locations, yard position and loading locations. Often yard master planning includes the localization of loading and unloading operations (e.g., general berth positions) [1, 4]. Usually, order neutral forecast give information about incoming vehicle volumes for yard planning purposes. This situation differs for outgoing vehicle volumes. Here terminals have information about particular customers’ orders. Dias et al. [2] describe these parallel order neutral push and customer related pull processes as a classical decoupling point in a supply chain [2]. Decoupling points allows a supply chains to react flexible to market demands fluctuations. However, they may lead to increasing complex internal dynamics. Classical yard planning addresses the orders’ neutral (forecast-driven) aspect by assigning vehicle volumes to predefined storage areas [5].

Automobile terminal planning tasks (based on [3])
Volatile demand fluctuations or unforeseen disturbances may affect the planning results negatively and decrease the terminals logistics performance. Planning procedures, which allow a more dynamic assignment of cars to storage areas, may improve the handling of parallel order neutral push customer related pull processes and lead to a better planning performance.
3 Autonomous Control of Logistics Processes
The concept of autonomous control aims at improving the handling of dynamic and structural complexity in logistics systems. It postulates a transfer of decision-making capabilities from centralized planning instances to the logistics objects. According to the general idea of autonomous control, intelligent logistics objects are able to interact with others in order to collect information about relevant local system states and to make decisions (e.g., routing decisions) according to their own objectives [9]. By allowing local decision-making, autonomous control aims at generating a positive emergent system behavior, which leads to an improved overall system performance [10]. Due to the locally dispersed decisions of intelligent logistics objects the system performance is less prone to unforeseen events and variations of process parameters [11, 12].
Several implementations of autonomous control strategies can be found for different logistics disciplines (e.g., production logistics [13] or transport logistics [14]). For the area of terminal logistics first autonomous control approaches showed promising results. Böse and Piotrowski [7] propose an agent based approach for assigning vehicles to technical services and related storage areas [7]. Görges and Freitag propose a biologically inspired approach, which allows assigning groups of cars to storage areas. Compared to a classical yard assignment this approach improved the logistics performance. Especially under dynamic conditions, this new approach performs best [6]. The analysis of this autonomous control method focused on the impact of internal and external dynamics, but the relation between systems structural complexity and the systems performance is still a topic of interest. In other logistics application autonomous control contributed to the system’s ability to cope with structural complexity [12, 15]. The ability to operate in structural complex logistic systems successfully is a crucial factor for autonomous control methods. Usually, automobile terminals (e.g., Bremerhaven) are characterized by a high degree of structural complexity (i.e., capacity of more than 100,000 vehicles, multiple berths and unloading points like truck slots or rail ramps). Thus, coping with structural complexity is essential for autonomously controlled terminal processes.
4 Automobile Terminal Scenario
4.1 Structural Configuration of the Scenario
In order to address the impact of structural complexity a generic and scalable terminal scenario (analogue to [6]) will be used. Figure 2 shows all elements of this scenario. It consists of \( nxm \) parking slots (\( A_{11} \) to \( A_{nm} \)), which are interconnected by driveways. Arriving and departing cars enter via sources (\( I_{1} \) to \( I_{k} \)) and leave the terminal via sinks (\( O_{1} \) to \( O_{j} \)). These sources and sinks may be modelled for any kind of transport media (ship, truck or train). On a detailed level, every parking slot is defined by its height (\( h \)), is width (\( w \)), and the row width (\( r \)). The amount of parking rows \( l \) in a slot results from these parameters. The height \( h \) defines the rows capacity and the row capacities defines the capacity of the parking slot (sum of rows capacities).

Scalable automobile terminal scenario with variable parking dimensions, different sources and sinks
In this paper the following parameters are used for generating scenarios: The area width is \( w = 160\,{\text{m}} \), the area height is \( h = 75\,{\text{m}} \) and the row width is \( r = 3\,{\text{m}} \) for each storage area. Hence, the capacity of a single parking slot is 795 for cars with a standard length of 5 m. In order to address the structural complexity, the size of the terminal scenario will be varied (increasing \( n \) and \( m \)). In particular, the following configurations with increasing sizes will be analyzed: 3 × 3, 4 × 4, 5 × 5, 6 × 6, 7 × 7, 8 × 8 and 9 × 9 parking areas. The analysis will focus on two typical auto terminals KPIs. The first KPI is the total driving distance of cars. The second KPI is the degree of sorting (i.e., sorting result). It describes the mixture of cars from different categories in one parking area. The higher the sorting result value, the better is the sorting of vehicles.
4.2 Modelling Incoming and Outgoing Volumes
In order to keep the modelling of vehicle volumes as simple as possible, this scenario focuses on vehicles arriving at the terminal via rail and leaving it via ship. There is an OEM for every parallel parking lot. This means a 3 × 3 size scenario has three OEMs, the 4 × 4 size scenario has four OEMs and so on. Every OEM in a scenario serves as many shipment destinations as sequential parking lots are available (i.e., three destinations in the 3 × 3 scenario and four destinations in the 4 × 4 scenario). In this context, a group or category of cars is defined for the following analysis as the mix of OEMs and destinations.
In order to model a realistic incoming behavior for all vehicle groups a sinusoidal arrival function (analogue to [6]) will be used. This allows to model volatile seasonal demand fluctuations. Similar seasonal effects can be observed in arrival volumes of real automobile terminals. Equation (1) shows the underling sine function for every group of vehicles \( k \). The parameter \( \lambda^{k} \) determines the mean arrival rate of vehicles in category \( k \), while the amplitude of the sine function is defined by \( \mu^{k} \). Besides the mean arrival rate, the phase shift \( \varphi^{k} \) and the period \( T \) determine the dynamic characteristics of this arrival function. The period \( T \) has be set to a quarter year.
The following table summarizes all chosen arrival rates of a destination of an OEM in for all size scenarios. Due to the higher terminals capacity the mean arrival rate has to increase with the scenario size. In our study, the mean incoming volume increases by 35 cars per day per OEM. Table 1 shows the volume distribution for all destinations.
In order to provide a realistic terminals behavior an initial inventory for all vehicle categories has been modelled. The terminals initial inventory for every class is set arbitrarily to 1000 vehicles. The phase shift is modelled according to the number of destinations of an OEM. It is distributed linear over all categories in order to provide an overall homogeneous influx of cars over time.
As in the real world, there are high and low runner destinations. High running destinations have a shorter turnaround time than low running destinations. In all scenarios a high runner destination has a mean terminal turnover time of 10 days and a low runner destination of 30 days. Accordingly, the turnover time vehicle of a particular OEM is linear distributed between 10 days and 30 days for every destination served by the OEM. These turnover times determine the behavior of outgoing vehicles.
4.3 Conventional Control Method
A simple yard assignment method has been implemented. Due to the scenario settings (described in Sect. 3.2), there is a separate parking lot segment for each destination of each OEM. Based on mean arrival rates and the estimated departure times (i.e., turnaround times) volumes of every vehicle category are assigned to a particular row. Destinations with a high turnover time will be located at a parking area further away from the quayside. Accordingly, there is more free storage space for high running volumes close to the quayside. This way of assignment is comparable to a forecast driven long term yard plan.
4.4 Autonomous Control Method
The autonomous control method used in this evaluation is a pheromone based approach. This approach is inspired by ants’ natural foraging behavior. It aims at marking decision alternatives with artificial pheromones, which can be interpreted by the logistics objects. While searching for food, ants leave evaporating pheromone trails, marking possible routes to food sources. Other ants are attracted by these trails and follow it. Ants following a trail increase the pheromone concentration. The pheromone concentration decreases over time due to the natural evaporation process. This natural concept can be transferred to decision marking in auto terminal scenarios (for a detailed description see also [6]). In particular, cars using this approach try to mark suitable parking rows by leaving artificial pheromones coding information about estimated driving distances between sources, parking rows and possible sinks (i.e. berth places) as well as information about the sorting result and the turnover time. Succeeding cars are able to read all available artificial pheromone information and to decide for a suitable parking row. The following equation describes the calculation scheme for the pheromone value for a particular car category \( k \) for every available row \( i \). As mentioned above, a category represents a combination of cars from one OEM for one destination.
The pheromone value \( P_{i}^{k} \) consists of four terms. Each term focuses on a different target value and can be weighted by a factor \( \gamma \). The first term aims at balancing the estimated turnover time \( G_{k} \) and the estimated driving distances \( W_{i}^{k} \) between source and sink of cars belonging to category k. Therefore, this term calculates the ranking position of the estimated distance factor \( W_{i}^{k} \) divided by the amount of parking areas \( {\text{F}} \) and relates it to the ranking of turnover time of remaining categories. The second term addresses the time of the latest vehicle parked in row i \( d_{i} \) and the oldest vehicle \( D^{k} \) on the terminal of category k. By doing so, this term tries to address the FIFO principle of a terminal. Vehicles with similar turnover times should stand closely together. The third term focuses on volume of vehicles of category \( v_{i}^{k} \) in the parking area of row \( i \) to the overall volume of vehicles \( V^{k} \) belonging to category \( k \). It tries to avoid spreading of vehicle volumes of the same category over many parking areas. The last term addresses the estimated driving distance of cars and aims at realizing short distances on the vehicles route from the source (e.g., truck or rail) to the parking row and finally to the sink (e.g., ship). It is defined as the ratio between the estimated distance \( W_{i}^{k} \) based on the moving average and the maximal possible distance for category \( k \) regarding all sources, storage areas and sinks. A car deciding for a particular parking row takes all available pheromone values into account and chooses finally the row with the lowest value of \( P_{i}^{k} \). A moving average over the last \( \upalpha \) cars of a category is used in order to model the evaporation process. In particular \( W_{i}^{k} \) and \( G_{k} \) are determined by using a moving average.
Two variants of this pheromone-based approach are implemented. In the basic variant cars are able to choose a row out of the set of rows which are available according to the conventional assignment (basic PHE). The alternative variant uses the same principles as described, but cars using this variant may choose a row out of all rows in the scenario without further restrictions (all area PHE).
5 Simulation Results
The scalable \( nxm \) terminal model has been implemented in a discrete event simulation model. The terminal size has been increased systematically in different simulation runs (see also Sect. 4). All assignment methods described before are implemented in this scenario. Both pheromone-based implementations use the same weighting parameters (\( \gamma_{1} = \gamma_{2} = \gamma_{3} = 0.1 \) and \( \gamma_{4} = 0.4) \), which performed well in pretest simulation runs. For reasons of general comparability, a forth assignment method has been applied in terms of a random assignment method. This random method assigns an arbitrarily chosen row to an incoming car. The performance of this method is expected to be the worst. However, it is used as a benchmark and can be seen as a kind of upper bound.
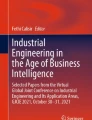
Figure 3 summarizes all simulation results. It depicts the average realized driving distance for all scenarios and for all methods. Moreover, it presents the respective sorting results (proportion of parking lots with two or more vehicle categories over time) for each scenario. Regarding the driving distances Fig. 3 shows that the autonomous control methods lead to a better performance compared to the conventional assignment. Especially, in scenarios with a higher structural complexly the autonomous control (basic PHE) performs better than the conventional method. As expected, the random assignment performs worst. Besides the driving distance, Fig. 3 shows the average sorting results in the simulations runs. As in the real world the conventional method, leads to a very good sorting result, due to its strict predefined assignment to parking areas. Compared to the conventional method the pheromone-based methods performs worse. To the cost of a lower sorting result, both autonomous control methods optimize the total driving distance. In general the pheromone based method helps to cope with increasing structural complexity.

Avg. driving distance and sorting results for different size scenarios
In addition, these results show an interesting effect regarding the behavior of the basic pheromone method and the pheromone method for all area assignment. In scenarios with lower structural complexity, the alternative pheromone method (PHE all areas) performs better that the basic variant. This effects changes for scenarios with a higher structural complexity (beginning from a scenarios size 6 × 6). This can be explained by the underling parameters of the used pheromone method. Especially, the amount of cars for generating moving average (α values) for each \( P_{i}^{k} \) may have an effect on the performance. Smaller values may cause quicker changes in the decisions, while bigger values lead to slower adjustments of decisions. Figure 4 confirms this. It shows exemplarily the 3 × 3 and the 6 × 6 scenario for both autonomous control methods for increasing α value. For both scenarios (3 × 3 and 6 × 6) the basic pheromone method leads to nearly constant results for increasing α values. Due to the lower structural complexity dynamic and the fewer decision alternatives, this parameter does not have an impact on the results. The alternative method (PHE all areas) shows a different behavior. In both scenarios an increase of the α value lead to varying results regarding the driving distance and the sorting result. Figure 4 shows that the impact of varying α values is higher in the 6 × 6 scenario. Here the best avg. driving distance has been realized for α = 1400. A comparison of the basic method and the modified version shows that the alternative version performs best regarding the average driving distance in the 3 × 3 scenario.

Simulation results for varying α value
Regarding the sorting result, it leads to better results in the 6 × 6 scenario. These results show, that besides the weighting factors the parameter α can be used to adjust the PHE methods performance.
6 Summary and Outlook
This paper presented a biologically inspired autonomous control method for the general assignment of cars at an automobile terminal and compared it with a conventional method. The analysis focused on scenarios with varying degrees of structural complexity. The analysis confirmed that the novel autonomous control method performs best in scenarios with a higher structural complexity (11% driving distance improvement for the basic method in the 6 × 6 scenario). This analysis showed that the improvements of avg. driving distances lead to lower sorting results. Moreover, the analysis focused on the impact of the pheromone based methods parameters. It showed that an adjustment of the methods underling parameters helps to improve the overall performance of the autonomous control method. Overall, it showed that autonomous control helps to cope with increasing structural complexity in different terminal scenarios. Further research activities will focus on this aspect and investigate methods for dynamically adjusting the moving average parameter in order to optimize the methods results. Another interesting research field is the implementation of similar autonomous control strategies for other logistics object (e.g., ships or trains).
References
Mattfeld, D.C.: The Management of Transshipment Terminals: Decision Support for Terminal Operations in Finished Vehicle Supply Chains. Springer Science+Business Media, New York (2006)
Dias, J.C.Q., Calado, J.M.F., Mendonça, M.C.: The role of European «ro-ro» port terminals in the automotive supply chain management. J. Transp. Geogr. 18, 116–124 (2010). https://doi.org/10.1016/j.jtrangeo.2008.10.009
Görges, M., Freitag, M.: Dynamisierung von Planugsaufgaben auf Automobilterminals. Ind. 4.0 Manag. 35, 23–26 (2019)
Mattfeld, D.C., Orth, H.: The allocation of storage space for transshipment in vehicle distribution. OR Spectr. 28, 681–703 (2006). https://doi.org/10.1007/s00291-006-0051-6
Cordeau, J.-F., Laporte, G., Moccia, L., Sorrentino, G.: Optimizing yard assignment in an automotive transshipment terminal. Eur. J. Oper. Res. 215, 149–160 (2011). https://doi.org/10.1016/j.ejor.2011.06.008
Görges, M., Freitag, M.: Modeling autonomously controlled automobile terminal processes. In: Proceedings of the Hamburg International Conference of Logistics (HICL), Hamburg (2019)
Böse, F., Piotrowski, J.: Autonomously controlled storage management in vehicle logistics—applications of RFID and mobile computing systems. Int. J. RF Technol.: Res. Appl. 1, 57–76 (2009)
Hülsmann, M., Schloz-Reiter, B., Freitag, M., Wycisk, C., de Beer, C.: Autonomous cooperation as a method to cope with complexity and dynamics?—a simulation based analyses and measurement concept approach. In: Bar-Yam, Y. (ed.) Proceedings of the International Conference on Complex Systems (ICCS 2006), pp. 1–8, Boston, MA, USA (2006)
Windt, K., Hülsmann, M.: Changing paradigms in logistics—understanding the shift from conventional control to autonomous cooperation and control. In: Hülsmann, M., Windt, K. (eds.) Understanding Autonomous Cooperation and Control in Logistics, pp. 1–16. Springer, Berlin, Heidelberg (2007)
Freitag, M., Herzog, O., Scholz-Reiter, B.: Selbststeuerung logistischer Prozesse - Ein Paradigmenwechsel und seine Grenzen. Ind. Manag. 20, 23–27 (2004)
Windt, K., Philipp, T., Böse, F.: Complexity cube for the characterization of complex production systems. Int. J. Comput. Integr. Manuf. 21, 195–200 (2008). https://doi.org/10.1080/09511920701607725
Scholz-Reiter, B., Rekersbrink, H., Görges, M.: Dynamic flexible flow shop problems—scheduling heuristics vs. autonomous control. CIRP Ann. 59, 465–468 (2010)
Toshniwal, V., Duffie, N., Jagalski, T., Rekersbrink, H., Scholz-Reiter, B.: Assessment of fidelity of control-theoretic models of WIP regulation in networks of autonomous work systems. CIRP Ann. 60, 485–488 (2011). https://doi.org/10.1016/j.cirp.2011.03.045
Rekersbrink, H., Makuschewitz, T., Scholz-Reiter, B.: A distributed routing concept for vehicle routing problems. Logist. Res. 1, 45–52 (2009)
Scholz-Reiter, B., Görges, M., Philipp, T.: Autonomously controlled production systems—influence of autonomous control level on logistic performance. CIRP Ann. 58, 395–398 (2009)
Acknowledgements
This research is part of the project “Isabella - Automobile logistics in sea- and inland ports: interactive and simulation-based operation planning, dynamic and context-based control of device- and load movements”, funded by the German Federal Minis-try of Transport and Digital Infrastructure (BMVI), reference number 19H17003A.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 The Editor(s) (if applicable) and The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Görges, M., Freitag, M. (2020). On the Influence of Structural Complexity on Autonomously Controlled Automobile Terminal Processes. In: Freitag, M., Haasis, HD., Kotzab, H., Pannek, J. (eds) Dynamics in Logistics. LDIC 2020. Lecture Notes in Logistics. Springer, Cham. https://doi.org/10.1007/978-3-030-44783-0_4
Download citation
DOI: https://doi.org/10.1007/978-3-030-44783-0_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-44782-3
Online ISBN: 978-3-030-44783-0
eBook Packages: EngineeringEngineering (R0)