
Abstract
This paper is aimed at the use of a UAV unmanned aerial vehicle (DJI Phantom 4), and the MicaSense RedEdgeM multispectral camera, for the acquisition of multispectral transported images of the coffee variety of Castilla accessible at Hacienda Los Naranjos in The Cajibío sale located at 1760 m above sea level in the department of Cauca, the gained images were processed using an algorithm developed in the MATLAB® Software to analyze them. The developed routines accept mosaic genres of the images gained through a flight plan that is characterized by having a horizontal and lateral overlap of 75%, the images were gained between February 7 and April 25, 2019 between 11:30 am and 12:00 m, additionally the routines allowed the calculation of vegetation indices such as NDVI, NDRE, GNDVI, and GRVI. That allows us to carry out phenological monitoring in coffee crops, to estimate the vigor or the state of health of the plant.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Image processing
- Mosaic
- Multispectral images
- Phenological tracking
- Significant differences
- Vegetation index
1 Introduction
Using multispectral sensors coupled to UAV has become in recent years a technique for monitoring crops that have improved the use of water resources and fertilizers through the use of precision agriculture techniques, the use of these Techniques in Colombia has focused mainly on the sugarcane sector. Coffee is one of the most widely used agricultural products in the world, it is also Colombia’s main agricultural product, and it depends on a significant percentage of the economy and livelihood of a large part of the population. It is produced in over 50 countries and provides a livelihood for over 25 million disadvantaged families worldwide. For consumers, coffee is a beverage that enjoys universal popularity, and sales amount to over 70 billion dollars a year. Coffee is, after oil, the most important commercial product in the world; it beats coal, wheat and sugar [1].
Precision agriculture comprises the management and administration of the soil and crops taking into account a principle of variability, where it is said that there are inequalities in soil properties within the same land that demand a different treatment according to their conditions. To achieve this differentiation, precision agriculture uses technological tools such as remote sensing sensors, global positioning systems (GPS), geographic information systems (GIS), differentiated rate application technologies (mechatronics, electromechanics) and other technologies. Information and communication (ICT) [2].
The precision agriculture cycle (see Fig. 1) helps to omit the premise of homogeneity that traditional agriculture preserves, in which processes such as land preparation, phytosanitary control, planting, and harvesting are done equally throughout the field, since it seeks to find the spatial and temporal variability within the field to decide on the moment, the location, the necessary quantity and the type of input to be managed, minimizing costs, impact on the environment and maximizing production or productivity [3].

Precision agriculture cycle [4]
The department of Cauca occupies one of the first positions in coffee production nationwide reaching 9% of the production [5], with about 68,000 hectares of coffee planted and almost 85,000 producers [6], placing it among the 5 first by extension and the number of producers, but this contrasts with the competitiveness data shown by the National Federation of Coffee Growers that rank it below the top 10 departments in competitiveness [7]. This is because of the conditions of the region which position the product as a special coffee, and this is ratified by the information of the national federation of coffee growers of the Cauca [8] who says that the department of the Cauca is a producer of special coffees by designation of origin, showing that coffee growers in the region have vocation and integrity, which regardless of the specific difficulties in the history of production in the region, continually seek alternatives and models of differentiated products to be more competitive.
2 Material and Method
The information acquisition methodology of this paper consists of the acquisition of multispectral aerial images of a coffee crop of the Arabica Coffee type of castle variety, these shots were made between February and April of the year 2019, through the integration of a DJI Phantom 4 Drone and the MicaSense Red Edge M multispectral camera, which allowed us to obtain the necessary information to study vegetation indices in coffee cultivation.
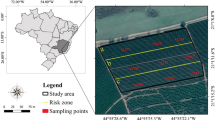
2.1 Description of the Study Crop
The Naranjos farm owned by SupraCafé in the municipality of Cajibío-Cauca, the specific study lot (see Fig. 2) and is identified as lot 3 by TecniCafé, having an approximate age of two and a half years since its planting in August 2016 and is located at an altitude of 1851 m above sea level, the lot has an approximate area of 0.1652 ha2 and an average of 828 coffee trees of Coffee Arabica variety of Castillo variety.

Crop of study (Lot 3) of TecniCafé
Lot 3 is divided into 3 zones (see Fig. 3), which presents different states of nutrition based on the nitrogen requirements of the crop where zone 1 has an optimal fertilization of 10 g/m2 per plant zone 2 it has a low level of fertilization with 5 g/m2 per plant and zone 3 a high fertilization having a concentration greater than 15 g/m2 per plant, this is determined in this way since the average nitrogen concentration in coffee of the Cauca is from 10 to 12 g/m2 per plant, this is achieved through the modification of the fertilizer within each zone which generates a variation in the state of vigor of the plants in the different zones, the treatment performed to the batch 3 can be seen in [9]. These differences in fertilization allow studying and analyzing the behavior of vegetation indices at different stages of fertilization.

Crop of study division lot 3.
The variables that will be taken into account when analyzing the information (multispectral aerial images) collected from the study crop (lot 3) as shown in Table 1.
2.2 MicaSense RedEdge-M
The RedEdge-M is a multispectral camera manufactured by the company MicaSense, which manages five spectral bands that allow studies of photogrammetry, cartography and precision agriculture, in a field. The images obtained with the RedEdge-M of its different bands help to construct maps or mosaics of the land, such as the chlorophyll map or other vegetation indices [10], which can also be used to create the digital model of land area.
The RedEdge-M camera allows you to carry out a follow-up study of the crops because when handling the bands Blue, Green, Red, NIR (near-infrared), and Red Edge (red border), it allows you to calculate the maps of the NDVI, GNDVI index, GRVI, NDRE which are the response variables that must be obtained from the coffee study crop (lot 3), in addition, its compact and lightweight design makes it adaptable to small UAV devices.
2.3 Drone DJI Phantom 4
The Phantom 4 Drone, has an OcuSync HD transmission system, which supports automatic dual frequency band switching, is equipped with a 20-inch 1-inch sensor capable of recording 4K/60 fps videos and burst mode at 14 fps. In addition, its Flight Autonomy system includes dual rear view sensors and infrared detection systems for a total of 5 directions of obstacle detection and 4 directions to avoid obstacles [11].
2.4 Flight Plan
Because the crop has an irregular shape measurement of the sides of the land is made and the maximum values of width (70 m) and length (23 m) present in the land are taken to be able to declare a rectangular flight area that covers whole lot 3 study.
For the flight zone, the parameters related to the flight lines, flight height, drone speed, the terrain footprint in the images and the overlap between images are calculated. The first parameter to obtain is the GSD of the MicaSense RedEdge-M camera at a certain height, in this case, we worked with the minimum recommended height (30 m) which guarantees a GSD of 2.1 cm per pixel.
Determined the GSD calculates the footprint of the terrain in the images or the coverage in meters that will cover an image in the terrain.
This indicates that each image taken at 30 m with the MicaSense RedEdge-M camera will have a footprint of 26.88 m by 20.16 m of the crop. For the flight lines, the terrain footprint and the desired overlap are taken into account, for this study a standard overlap of 75% was determined, that is, the images will have 75% of information in common, in this case it was noted that the Footprint width covers the width of the flight zone, making it necessary to have a single flight line located in the center (see Fig. 4).

Diagram of flight lines.
In order to determine the flight speed, the image fingerprint height, the 75% overlap stated above and the image shutter time are taken into account.
With the value of the distance in the air between image the calculation is made to obtain the speed of the flight, for this process a shutter time of 2 s was determined obtaining.
3 Results
The method for calculating vegetation indices from multispectral images taken with the MicaSense Red Edge M camera. The indices to be obtained from the study crop (lot 3) are NDVI, GNDVI, GRVI, and NDRE, for this purpose it was developed an algorithm for digital image processing in the MATLAB development environment which allows analyzing and processing the multispectral images of the study and culture taken by the MicaSense Red Edge M camera.
This analysis is composed of three stages, the first is the application of the MicaSense Red Edge M camera radiometric calibration model, the construction of panoramas or mosaics from multispectral images and the calculation of vegetation indices.
3.1 Radiometric Calibration
Radiometric calibration or radiometric corrections are those that will directly affect the radiometry of the image. These corrections become necessary due to erroneous values recorded in the image capture due to atmospheric disturbances (atmospheric absorption and dispersion phenomena) or deficiencies in the construction of the sensor [12].
The radiometric calibration process for the images of the MicaSense Edge M net- work starts by applying the camera’s radiometric calibration model to the images of the CRP and the study crop to convert the pixel value images into digital levels (ND) unprocessed to images in absolute spectral brightness values. This model compensates for the black level of the sensor, the sensitivity of the sensor, the gain and exposure settings of the sensor and the vignette effects of the lens. The parameters to implement the radio-metric calibration model are obtained through the metadata see Table 2 saved by the RedEdge M camera in each image.
Equation (5) shows the calibration model of the Red Edge M camera to calculate the spectral brightness “L” from the pixel value “p” [13].
Where,
-
p is the normalized unprocessed pixel value
-
pBL is the normalized black level value
-
a1, a2, a3 are the radiometric calibration coefficients
-
V (x, y) vignette polynomial function for pixel location (x, y).
-
is the image exposure time (is/100) is the sensor gain setting
-
x, y are the column of pixels and the row number, respectively
-
L is the spectral radiation in W/m 2/sr/nm
Having the images in spectral radiance, the images corresponding to the calibrated reflectance panel (CRP) are used to obtain the calibration factor by the band using the following equation
-
Fi is the reflectance calibration factor for the band i
-
ρi is the average reflectance of the CRP for band i, (Blue, Green, Red, and NIR = 0.49, Red Edge = 0.50)
-
avg (Li) is the average radiance value of the pixels within the panel for the band i
To complete the calibration process, the factor of each band must be multiplied to the images of the crop in radiance per band, this allows the images to be converted to spectral reflectance values with which the vegetation indices can already be obtained.
3.2 Mosaic Construction
The construction of panoramas or mosaics is used in this type of study because the flight plans result in a set of images that encompasses the entire study crop which necessitates a treatment of these images that allows to build a larger image resolution composed of all these images, thus obtaining a better visualization of the crop.
This process is applied to radiometrically calibrated images and is made between images of their respective band, that is, when using images taken by the MicaSense Red Edge M, five panoramic images of the study culture will be obtained.
The process for the construction of scenarios begins with the detection and extraction of characteristics between pairs of sequential images, that is to say progressively be- tween images X (n) and X (n + 1), followed by X (n + 1) and X (n + 2), until reaching the last image, starting from the fact that “n” is the first image, where the points of interest or coincident characteristics and their location within each image are detected and extracted, to implement it in MATLAB the “detectSURFFeatures” and “extract- Features” commands are used to obtain the points of interest between a pair of images and then the “matchFeatures” command is applied, to compare and select the matching points between a pair of images giving the position of these in each image (see Fig. 5).

Selected points of interest.
With the coincident points selected between the images, the transformation that allows the translation, rotation, scale and trimming of image pairs must be obtained, so that the coincident points of the image X (n + 1) overlap and coincide. with the points of interest of the image X (n), allowing to build an image composed of two or several images, this is obtained by means of the “estimateGeometricTransform” command, which finds the transform for each pair of images and when applying them, the panorama is constructed for each set of images (see Fig. 6).

Panoramas of the study crop by band.
3.3 Index Calculation
The index calculation is done in two steps, the first is the alignment of the pano- branches of the bands that each equation requires for the calculation of indices and the second is the application of this.
To align the scenarios, the MATLAB imregtform and imregister commands are used, these are implemented for alignment of two images where one of them is a reference and the other will be the one that is coupled by means of the obtained transformation, creating an image new aligned with respect to the reference image, the imregt form command estimates a transformation by movement between the panoramas, the imregister command obtains a transformation based on the image intensity register, which allows the alignment of different band panoramas (see Fig. 7).

Vegetation indices with color scale. (Color figure online)
3.4 Descriptive Analysis
The descriptive analysis refers to the description of the vegetation indices obtained with respect to the nutritional status of the crop all based on what each index perceives.
3.4.1 NDVI Index
The result of the processing of the multi-spectral images of the MicaSense Red Edge M camera for the calculation of the NDVI index of the study culture is indicated (see Fig. 8), it can be seen that this index allows to correctly differentiate the plant material from the cultivation with respect to its environment, giving fidelity to the fact that the process carried out was optimal, in terms of monitoring the three areas of the crop this index does not reach a significant difference between the values of the three areas of the crop, since the values of the zones are between 0.9 and 1, making the whole crop to have a green color, in addition the crop not having detailed grooves always makes the NDVI index fail to identify the soil within the crop.

NDVI panorama (Color figure online)
3.4.2 NDRE Index
The result of the calculation of the NDRE index (see Fig. 9) present in the study crop is presented by means of multispectral image processing taken with the MicaSense Red Edge M camera, this index has a similar functionality to the NDVI, that is, it allows to estimate the state of crop vigor, on the one hand, this index also allows differentiating the study crop from its surroundings, and allows differentiating the treatments presented by the areas of the study crop, since zone 1 and 2 which have less fertilization have the more reddish spots indicating values close to zero, noting the nutritional deficit in these areas.

NDRE panorama
3.4.3 GNDVI Index
The results of the GNDVI index (see Fig. 10) obtained with the multispectral image processing of the MicaSense Red Edge M camera, this index is the relationship between the Nir and Green band, which seeks to relate the state of Clorofila of the plant with respect to the values of the index, as you can see this index is similar to the NDVI allowing the identification of the crop with respect to the soil in addition, it presents a better visualization of the states of the cultivation areas by means of the amount of points or regions of reddish or yellow color within each zone of the crop allowing to identify which zone is in a better state, and in this case it could be said that it is the central zone of the crop or that of the right side that is zones 2 or 3.

GNDVI panorama. (Color figure online)
3.4.4 GRVI Index
The result of the GRVI index (see Fig. 11) when processing multispectral images taken with the MicaSense Red Edge M camera with the algorithm developed in this research work. This index allows us to better differentiate the study crop from its surroundings than the other indices, and also perceives the different plant species pre- sent in the crop as it is, the trees within the crop, the grass around it, and the objects. Regarding the monitoring of the treatments that each area of the study crop has visually, this index is not efficient since it includes the cultivation in 10 to 20 vales throughout the crop giving a similar color tone in the areas.

GRVI panorama (Color figure online)
4 Discussions
In this study, five flights were taken to the study crop with which five scenarios were
obtained by index from which the tables were obtained (Tables 3, 4, 5 and 6), which represent the modal values of each zone on their respective flight date.
A statistical study was applied to these data, which is composed of a regression and correlation analysis to determine if there is any correlation of behavior between the NDRE, GNDVI and GRVI indices with respect to the NDVI within the study crop. This resulted in the following: For Zone 1, Table 7 was obtained, which indicates a positive (weak) correlation coefficient between the NDRE and GRVI indices with respect to the NDVI and a negative coefficient with the GNDVI index, but all they indicate a low coefficient of determination close to 0.3 indicating that the regression functions of zone 1 have a low correlation.
The Table 8 shows the correlation values of zone 2 of the study crop. This zone has positive correlations between the NDVI, NDRE and GNDVI index, unlike the GRVI index which has a negative correlation, taking into account the coefficient of de- termination could be said that the best correlation occurs between the NDVI and GNDVI index and there is a correlation close to −1 indicating a direct negative correlation with the GRVI.
For zone 3, Table 9 was obtained, which shows that all the indices have a negative or close to zero correlation coefficient, thus being the area with the lowest correlation be- tween indices, although there is a weak correlation according to the coefficient of de- termination between the NDVI and GNDVI index.
5 Conclusion
The NDVI index for this case study fails to perceive the different fertilization treatments that each zone has in the study crop, making it not helpful for monitoring the nutritional status of the coffee of Arabian coffees of Castle type, although this may be related to the age of the crop which is approximately 3 years, that is to say in adulthood and that is when the NDVI index loses the sensitivity to the perception of chlorophyll of the plant.
The GRVI index, which makes it possible to differentiate better the Coffea Arabica- type coffee plants of the castle type from the other plant species present in the study crop, making this index the most suitable if we want to detect weeds or plants Invasive coffee crops.
The GNDVI and NDRE indices are efficient to perceive the changes in nutrition in coffee crops of the Coffea arabic type of castle type, since they were the best to perceive the different fertilization treatments present in each area, making them optimal for phenological monitoring to coffee crops in the region.
Taking into account the results of the statistical correlation analysis, it could be said that in general the NDVI, NDRE, GNDVI indices have a behavioral relationship, with the GNDVI having the best correlation with the NDVI since a correlation coefficient was obtained in the zone 2 of 0.9563 and in zone 3 of −0.6512, indicating a strong behavior relationship in the greater area of the crop, regarding the NDRE index a correlation coefficient of 0.585 was obtained in zone 1 which perceives a positive relation- ship and Reliable in this zone, in zone 2 and 3 there is a weak relationship since the coefficients are 0.2592 for zone 2 and −0.2967 for zone 3.
The behavior relationship between the NDVI and GRVI index was only strong in zone 2 of the crop where a coefficient of −0.9457 was obtained, that is, a direct negative correlation, this can occur because each index is implemented for different situations such as the NDVI perceives the state of vigor of a crop and the GRVI allows to identify different species of plants present in a crop.
References
Echeverri, D., Buitrago, L., Montes, F., Mejía, I., del González, M.P.: Café para cardiólogos. Revista Colombiana de Cardiología 11(8), 357–365 (2005)
Meneses, V.A.B., Téllez, J.M., Velásquez, D.F.A.: Uso de drones para el análisis de imágenes multiespectrales en agricultura de precisión. Ciencia y tecnología alimentaria (2015)
Rivera, A.F.G., Clavijo, F.V., López, A.F.J.: Agricultura de Precisión y Sensores Multiespectrales Aerotransportados (2016)
Yost, M.A., Kitchen, N.R., Sudduth, K.A., et al.: Precis. Agric. 20, 1177 (2019)
C&C cauca agenda de competitividad. http://www.cccauca.org.co/public/archivos/documentos/resultados-resumen.pdf
Asoexport. http://www.asoexport.org/productividad-productividad
Leiva, F.: La agricultura de precisión: una producción más sostenible y competitiva con visión futurista (2003)
Cauca se posiciona como productor de cafés especiales. https://cauca.federaciondecafeteros.org/buenas_noticias/cauca_se_posiciona_como_productor_de_cafes_especiales/
Parque tecnológico del café- Tecnicafe. http://www.cauca.gov.co/noticias/parque-tecnologico-del-cafe-tecnicafe-una-realidad-al-servicio-de-la-innovacion-de-la
MicaSense RedEdge-MTM Multispectral Camera - User Manual (2018)
Phantom 4 Manual de usuario (2016). Versión 1.2
Romero, M.A., Cazorla, M.: Comparativa de detectores de características visuales y su aplicación al SLAM (2009)
Cao, S., Danielson, B., Clare, S., Koenig, S., Campos, C., Sanchez, A.: Radiometric calibration assessments for UAS-borne multispectral cameras: laboratory and field protocols. ISPRS J. Photogramm. Remote Sens., 132–142 (2019)
Author information
Authors and Affiliations
Corresponding authors
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Manzano, J.M., Narvaez, J.G., Castillo, J.G., Vásquez, D.R., Villada, L.G. (2020). Analysis of Normalized Vegetation Index in Castile Coffee Crops, Using Mosaics of Multispectral Images Acquired by Unmanned Aerial Vehicle (UAV). In: Botto-Tobar, M., Zambrano Vizuete, M., Torres-Carrión, P., Montes León, S., Pizarro Vásquez, G., Durakovic, B. (eds) Applied Technologies. ICAT 2019. Communications in Computer and Information Science, vol 1194. Springer, Cham. https://doi.org/10.1007/978-3-030-42520-3_43
Download citation
DOI: https://doi.org/10.1007/978-3-030-42520-3_43
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-42519-7
Online ISBN: 978-3-030-42520-3
eBook Packages: Computer ScienceComputer Science (R0)