
Abstract
For the coming years, the commercial air transport industry will have to take up the huge challenge of both reducing the costs associated to the aircraft fuel consumption and reduce the global air transport environmental footprint. Reaching these two objectives leads to the reduction of the fuel consumption, the reduction of the pollutant emissions (specifically CO2 and NOx emissions), and the reduction of noise emissions.
Julie Gauvrit-Ledogar, Arnault Tremolet, and Loïc Brevault email: Julie.Gauvrit-Ledogar@onera.fr
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

1 Introduction
For the coming years, the commercial air transport industry will have to take up the huge challenge of both reducing the costs associated to the aircraft fuel consumption and reduce the global air transport environmental footprint. Reaching these two objectives leads to the reduction of the fuel consumption, the reduction of the pollutant emissions (specifically CO2 and NOx emissions), and the reduction of noise emissions.
In Europe, the document Flightpath 2050 Europe’s Vision for Aviation (European Commission 2011) written by the High Level Group on Aviation Research provided in 2011 quantified goals for the reduction of CO2, NOx, and perceived noise emissions of flying aircraft, by 2050.
These ambitious objectives can be achieved through several solutions deployed either lonely or as a combination. First, the aircraft performance could be improved with the use of new technologies. For instance, new architectures for the propulsion system, lighter structures, or new aerodynamic devices could be integrated. Then, the improvements could come from the aircraft itself with the modification of its general shape: the current Tube and Wing (T&W) configuration could be dropped for alternative configurations. Finally, the commercial air transport flight procedures could be improved in order to increase the aircraft efficiency.
Among these solutions, the alternative architecture configurations show the greatest sources of potential improvements and the Blended Wing Body (BWB) seems to be one of the most promising (Liebeck 2004; Nickol 2012). The BWB configuration offers better aerodynamic performance than current T&W configuration and could lead to reduced overall aircraft take-off weight and required fuel weight for performing the same mission (Liebeck 2004; Nickol 2012; Greitzer et al. 2010).
In addition, the BWB configuration enables the integration of the propulsion system over the wing central body upper surface that is offering a wide area at the trailing edge acting as a masking surface (Liebeck 2004; Nickol 2012; Greitzer et al. 2010; Yang et al. 2018). This could contribute to reduce the noise emissions from the propulsion sources.
Due to the maturity of such an aerospace vehicle for commercial air transport, numerous uncertainties are present both in terms of disciplinary models and future mission hypotheses. In this chapter, an Uncertainty Quantification (UQ) methodology is performed on a BWB multidisciplinary design process. Two types of uncertainty analyses are carried out: a Crude Monte Carlo uncertainty propagation on the coupled multidisciplinary process and a sensitivity analysis using Sobol indices. This chapter is organized as follows. In Section 11.2 a general description of the BWB concept is provided. Then, in Section 11.3, the coupled multidisciplinary process and all the disciplinary modules are described. Section 11.4 is devoted to the uncertainty analysis on this concept and Section 11.5 describes the future works.
2 Blended Wing Body (BWB) as an Alternative Configuration for Commercial Air Transport Aircraft
BWB is an adaptation of the flying wing concept for the commercial air transport. For both BWB and flying wing, the main principle lies in the fact that the overall airframe of the aircraft is restricted to the single wing, as the only element directly providing the aircraft lift. The wing becomes the main element of the overall airframe and all the other subsystems required on an aircraft as engines, passenger cabin, cargo hold, control surfaces, etc. are integrated within the wing. For the commercial air transport application, the thickness of the wing is constrained by the minimal height of the passenger cabin which has to accommodate standing up passengers. This leads to a thick airfoil in the central part of the wing containing the pressurized part. This geometry slightly differs from the pure flying wing and is called Blended Wing Body. Figure 11.1 illustrates a typical BWB overall airframe with its internal layout (passenger cabin, cargo hold, fuel tanks, landing gears, etc.).

Typical BWB overall airframe with its internal layout
The wing integrates all the subsystems inducing strong interactions between themselves. These interactions are not present in the traditional T&W configurations where each subsystem is affected to a dedicated geometrical part: the wing, the fuselage that accommodates the pressurized part, the tail plane that includes the control surfaces, etc. For instance, the aerodynamics of the BWB wing central part is directly affected by the primary structure of the pressurized part. This means that the design of the central part of the wing must take into account the coupling between the aerodynamic airfoil definition and the pressurized part primary structure sizing. Another illustration is about the BWB control surfaces which are integrated to the wing thus each modification of the overall wing geometry directly affects the control surface shapes and positions and so the overall control and handling qualities.
Designing and optimizing a Blended Wing Body aircraft inherently require to consider multiple disciplines at the same time. MDAO methodologies and tools are the best means to handle such a challenge. The multidisciplinary approach allows taking into account the numerous couplings between the disciplines and assessing the impact of each subsystem on each other.
3 Multidisciplinary Design Analysis (MDA) for Blended Wing Body Configurations
To address the issue of the design and optimization of BWB configurations, a dedicated MDA process has been developed with 5 disciplinary modules (Gauvrit-Ledogar et al. 2018):
-
Geometry,
-
Propulsion,
-
Structure,
-
Aerodynamics,
-
Mission.
Figure 11.2 illustrates the MDA process dedicated to BWB configurations expressed through a XDSM diagram (Lambe and Martins 2011).

XDSM diagram of the MDA process dedicated to BWB configurations
The following paragraphs provide a description of each disciplinary module involved in the MDA process.
3.1 Geometry Module
The Geometry module provides all the required geometrical data that describe the BWB configuration. These geometrical data are based on an exhaustive parameterization of the BWB overall airframe and internal layout. The parameterization has been developed with the aim of being able to model several design choices for the BWB topology. It concerns the wing body airframe, the passenger cabin, the cargo hold, the engines, the fuel tanks, the landing gears, and the control surfaces. Figure 11.3 depicts some geometrical parameters of the wing body airframe in the plan form (top view). The geometrical parameterization represents 108 parameters, broken down as illustrated in Figure 11.4. The Geometry module is based on 3 internal submodules.

Extract of geometrical parameters for the wing body airframe in the plan form (top view)

BWB configuration geometrical parameterization breakdown (total number of variables: 108)
The first submodule performs the sizing of the pressurized part which is constituted by both the passenger cabin and the cargo hold. The passenger cabin overall dimensions are calculated to meet the mission payload requirements expressed in terms of passengers number and internal passenger cabin compartments number. The passenger cabin internal definition is computed using traditional commercial air transport aircraft cabin dimensions for the cockpit, the seats, the aisles, the WC, the galleys, etc. In addition, the passenger cabin internal layout is made with the respect of the existing certification specifications applicable for large aeroplanes CS-25 provided by the European Aviation Safety Agency (EASA) (EASA 2014). These specifications give guidelines for the doors sizing and positioning with regard to the emergency passenger evacuation. Figure 11.5 illustrates a result of a BWB passenger cabin internal layout provided by the Geometry module.

Illustration of a BWB passenger cabin internal layout
In comparison with traditional T&W passenger cabins, the BWB passenger cabins overall geometry and internal layout are strongly dependent of the leading edge sweep angle of the wing central body. Figure 11.6 presents the differences between two cabins based on the same number of passengers with leading edge sweep angles of, respectively, 40∘ and 60∘.

Comparison of BWB passenger cabin internal layout for wing central body leading edge sweep angles of 40 degrees (left) and 60 degrees (right)
The cargo hold overall dimensions are calculated to meet the mission payload requirements expressed in terms of standard containers and pallets number, bulk volume, and total hold volume. As for the passenger cabin, the cargo hold definition is computed using traditional commercial air transport aircraft cargo hold layouts and dimensions. Figure 11.7 illustrates a result of BWB cargo hold internal layout provided by the Geometry module.

BWB cargo hold internal layout with standard 96″ pallets or LD-3 cargo containers filling
The submodule that performs the sizing of the pressurized part is a Python code and contains analytical formulations of the passenger cabin and cargo hold internal layout and dimensions definition.
The second submodule performs the geometrical transformations required to make available all the inputs required by the other disciplinary modules of the process (mainly the Structure and the Aerodynamics modules). This submodule is a Python code and contains analytical formulations that transform geometrical data into appropriate inputs for the other modules.
The third submodule collects all the geometrical data and automatically creates an OpenVSP 3D view of the defined aircraft (Fredericks et al. 2010). This OpenVSP 3D view is made using an intermediate input file that gathers all the geometrical data describing the aircraft and feed the OpenVSP software. This provides a visualization of the generated BWB overall airframe and internal layout, as represented in Figure 11.1.
The inputs and outputs of the Geometry module are summarized in Figure 11.8.

Geometry module input and output categorization (25 input variables and 55 output variables)
3.2 Propulsion Module
The Propulsion module computes the performance of the engines within the overall expected flight domain of the aircraft, which is expressed in terms of Mach number, altitude, and T5. The T5 represents the temperature of the engine combustion chamber, which can be assimilated as the throttle. To assess the performance of one engine, the Propulsion module computes the thermodynamic cycle of the turbine engine, passing through all its internal components (compressors, combustion chamber, turbines, etc.). Figure 11.9 illustrates the engine decomposition for the Propulsion module thermodynamic cycle computation, based on a typical turbofan engine.

Engine decomposition for the Propulsion module thermodynamic cycle computation
The results provided by the Propulsion module are calibrated on the basis of existing engines of the same category. For the application described here, the GE-90 85B (EASA 2017) is the reference engine. This is a well-known engine, currently used on existing aircraft and for which numerous characteristics and performance are available.
The Propulsion module provides a performance table expressed in terms of thrust and fuel consumption within the range Mach number, altitude, and T5 expected flight domain. Figure 11.10 illustrates the typical performance obtained.

Illustration of the typical thrust and consumption surfaces provided by the Propulsion module
Beside the performance results, the Propulsion module also provides an estimation of the weight and dimensions of the engine modeled.
The Propulsion module is a Python code and contains analytical formulations of the engine thermodynamic cycle computation and its weight and dimensions evaluation. Its inputs and outputs are summarized in Figure 11.11.

Propulsion module input and output categorization (10 input variables and 7 output variables)
3.3 Structure Module
The Structure module assesses the aircraft mass breakdown, balance, and inertia. In order to obtain these results, it follows two computation steps. First, it performs the structural sizing of the aircraft primary structure, following structural analysis expert calculation methods. Then, it evaluates all the aircraft subsystem weights combining expert rules and statistical models. The results are used to evaluate specific aircraft weights. The considered weights are described hereafter.
-
The Operational Empty Weight (OEW). OEW is the addition of the weight of each structural and subsystem item constituting the aircraft, including the operational items required for performing the mission (passengers accommodation, etc.).
-
The Payload Weight (PW). In the context of commercial air transport aircraft, the Payload Weight represents the weight of the passengers including their associated luggage added to the weight of the cargo.
-
The Fuel Weight (FW). The Fuel Weight is the weight of the fuel required for performing the aircraft overall mission. FW is composed of the mission fuel weight required for performing the nominal mission and a reserve of fuel weight added in case of diversion or holding segments (corresponding to a potential waiting time before landing clearance).
-
The Zero Fuel Weight (ZFW). The Zero Fuel Weight represents the weight of the aircraft without its fuel. It is the result of the combination of the OEW and the PW:
$$\displaystyle \begin{aligned} ZFW = OEW + PW. \end{aligned}$$ -
The Take-Off Weight (TOW). The Take-Off Weight is the aircraft weight at its take-off. It is the results of the combination of the OEW, the PW, and the FW:
$$\displaystyle \begin{aligned} TOW = OEW + PW + FW = ZFW + FW. \end{aligned}$$The aircraft structure sizing with regard to its mission and payload requirements leads to a maximal possible weight at its take-off, called the Maximal Take-Off Weight (MTOW). For an aircraft in operation, this MTOW represents the maximal weight for which it has to demonstrate its compliance with the certification specifications.
-
The Landing Weight (LW). The Landing Weight is the aircraft weight at its landing, after having performed its nominal mission. It is the results of the combination of the OEW, the PW, and the reserve fuel weight (RFW):
$$\displaystyle \begin{aligned} LW = OEW + PW + RFW = ZFW + RFW. \end{aligned}$$
The aircraft structure sizing mentioned previously also leads to a maximal possible weight at its landing, called the Maximal Landing Weight (MLW). MLW is used to size the landing gears.
First, the Structure module sizes the aircraft primary structure which is composed of all the elements that contribute to the mechanical strength of the aircraft. For the external part of the wing body, the primary structure is composed with the wing box which represents the primary structure of the wing, bounded by the leading edge and trailing edge spars and composed of structural elements as ribs, stringers, etc. For the central part of the wing body, the primary structure is composed of the pressurized part which is constituted by both passenger cabin and cargo hold. Figure 11.12 illustrates the BWB geometry with the primary structure highlighted.

BWB primary structure defined by the Structure module
The primary structure is defined using a parametric Finite Element Model (FEM). It uses geometrical inputs provided by the Geometry module (external part of the wing body, passenger cabin, and cargo hold dimensions) to model each subcomponent (lower and upper surface skins, spars, ribs, and stringers).
The primary structure is sized with regard to specific load cases. These load cases are defined according to the aircraft expected flight domain and concerns, on the one hand, the typical aircraft load cases (maneuvers, gusts, etc.) specified in the certification specifications applicable for large aircraft CS-25 (EASA 2014) and, on the other hand, efforts related to the pressurization of the passenger cabin and cargo hold. In order to identify the design case (i.e., the most critical case among the load cases considered), the load cases are assessed for several aircraft configurations and weights. The configurations deal with several control surface deflections while the weights concern several different degrees of fuel filling corresponding to several points of interest throughout the mission: ZFW, MLW, and MTOW.
Once the primary structure is sized, its weight, balance, and inertia are estimated. It also provides constraints for the wing central body aerodynamic airfoil definition that must wrap the primary structure around. Then, the Structure module assesses the weight, balance, and inertia of all the other subsystems present on the aircraft but do not contribute to the structural efforts (landing gears, engine pylons, power units, systems, furnishing, operator items weight, etc.). For assessing those subsystems, the Structure module uses reference data or statistic formulations from already existing aircraft.
The Structure module provides weight, balance, and inertia estimation of the overall aircraft and its breakdown through typical item groups (structure, power units, systems, furnishing, payload, etc.). The weight, balance, and inertia provided for the overall aircraft concern several points of interest throughout the mission for different degrees of fuel filling (ZFW, MLW, MTOW, etc.).
The Structure module is a Fortran code. Its inputs and outputs are summarized in Figure 11.13. Figure 11.14 illustrates a typical result of long-haul BWB mass breakdown obtained with the Structure module.

Structure module input and output categorization (71 input variables and 48 output variables)

Typical BWB mass breakdown
3.4 Aerodynamics Module
The Aerodynamics module computes the aerodynamic characterization of the aircraft within its expected flight domain, which is expressed in terms of Mach number and altitude.
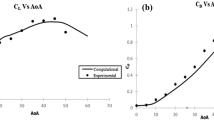
On the basis of geometric description of the aircraft and airfoil performance definition, the Aerodynamics module computes the aerodynamic performance. Performance is described by the drag coefficient value C D in function of lift coefficient value C L. The lift distribution considered follows the typical hypothesis of having an elliptical shape load distribution throughout the wing span. The Aerodynamics module is able to take into account the drag effects of the geometrical subsystems as wing, fuselage, winglet, tail plane, and nacelle. The drag is broken down within several drag contributors which are the induced drag, the viscous drag, the wave drag, and the parasite drag. With such a module only the clean configuration, without any control surfaces deflected, is evaluated.
The Aerodynamics module results in tabulated values of total C D and detailed contributors versus Mach, altitude, and C L. Figure 11.15 illustrates the total C D evaluation versus Mach number and C L for three different altitudes.

Total C D evaluation versus Mach number and C L provided by the Aerodynamics module
The Aerodynamics module is a Fortran code and contains analytical and statistical formulations of the lift and drag assessment (Lowry and Polhamus 1957; Raymer 2012; Niţă and Scholz 2012; Gur et al. 2010; Nită 2012; Torenbeek 2013; Haftmann et al. 1988). Its inputs and outputs are summarized in Figure 11.16.

Aerodynamics module input and output categorization (66 input variables and 3 output variables)
3.5 Mission Module
The Mission module computes the performance of the aircraft through its mission and assesses the required fuel weight.
The Mission module decomposes the mission in several segments: take-off, climb, cruise, descent, and landing. It also considers additional segments for fuel reserve assessment: diversion, holding, etc. Figure 11.17 illustrates the typical aircraft mission decomposition modeled by the Mission module.

Typical aircraft mission decomposition modeled by the Mission module
For each segment of the flight, the Mission module computes the aircraft trajectory through systems of differential flight mechanics equations using the propulsion and aerodynamics database provided, respectively, by the Propulsion and Aerodynamics modules. The Mission module computes the aircraft trajectory on the basis of an initial maximal aircraft weight represented by the MTOW and assessed with the weight breakdown provided by the Structure module.
The mission segments are computed taking into account constraints on the aircraft performance from the certification specifications applicable to large airplanes CS-25 (EASA 2014). These constraints concern the minimal required performance for the take-off and climb segments, including one (or more) engine(s) inoperative and the operational ceiling.
The Mission module provides the total fuel weight (FW) required to achieve the mission and a vector describing all the aircraft state throughout the mission segments (time, traveled distance, altitude, speed, required thrust, fuel consumption, etc.). As already presented above, the total fuel weight FW is composed of the mission fuel weight required for performing the nominal mission and a reserve fuel weight required for the diversion and holding segments.
The Mission module is a Fortran code. Its inputs and outputs are summarized in Figure 11.18.

Mission module input and output categorization (44 input variables and 10 output variables)
3.6 Multidisciplinary Analysis Process
3.6.1 Variables
The Multidisciplinary Design Analysis (MDA) process, displayed in Figure 11.2, is implemented within the OpenMDAO framework (Gray et al. 2010). This process handles a total of 133 system variables which can be classified within the following types:
-
Top Level Aircraft Requirements (TLAR) variables,
-
Model parameters,
-
Design variables.
The TLAR variables represent the aircraft mission requirements and are frozen for a given optimization problem. Figure 11.19 describes the variables considered as TLAR variables.

TLAR variables categorization (number of variables: 8)
The model parameters are the inputs required to tune the disciplinary modules. Figure 11.20 describes the variables considered as model parameters.

Model parameters categorization (number of variables: 53)
The design variables are the variables that describe the aircraft. Figure 11.21 describes the variables considered as design variables.

Design variables categorization (number of variables: 72)
3.6.2 Disciplinary Couplings
The BWB MDA process includes a very typical interaction for aircraft design processes between the weight estimation and the mission analysis. It is formalized within the process via the loop between both the Structure and Mission modules, as depicted in Figure 11.22. This loop concerns three variables which are the MTOW, the mission fuel weight, and the reserve fuel weight.

Loop between the Structure and Mission modules
The consistency of the weights considered, respectively, by the Structure module and the Mission module is ensured by the convergence of both MTOW and FW (i.e., mission fuel weight and reserve fuel weight) through a Fixed Point Iteration (FPI) introduced at the top level of the process (see Chapter 1 for details about FPI). FPI helps to find an equilibrium weight point for both MTOW and FW. Figure 11.23 illustrates this loop.

FPI loop to solve aircraft weight convergence
As explained in the Structural module description, the Structure module computes the primary structure load cases for several aircraft weights (ZFW, MLW, and MTOW) in order to identify the design cases. At each iteration i of the FPI, these weights are computed using the ZFW assessed by the Structure module itself at the previous FPI iteration i − 1 of the MDA and the FW provided by the Mission module at the previous FPI iteration i − 1 of the MDA. Therefore, the Structure module provides an updated estimation of the ZFW corresponding to the FPI iteration i, which will then be used as an input by the Mission module. The Mission module adds to this ZFW the FW assessed at the previous FPI iteration i − 1 and obtain an initial maximal aircraft weight represented by the MTOW.
This interaction between both the Structure and Mission modules is a typical interaction for aircraft design processes where the structure sizing and the associated weight estimation must be compliant with the aircraft mission and the required fuel weight.
For the central part of the wing, around the pressurized part, the primary structure directly impacts the overall aerodynamics of the aircraft. The airfoil shape for the central part of the wing has to take into account the primary structure geometry around the pressurized part. This could directly affect the aircraft aerodynamic performance. This interaction between the structure sizing and the aerodynamic performance is a typical specificity of the BWB configurations and does not exist in the T&W structure where the aerodynamic performance of the wing is independent of the pressurized part primary structure sizing which is relegated to the fuselage. This interaction is formalized within the BWB MDA process via the coupling between both Structure and Aerodynamics modules, as depicted in Figure 11.24.

Structure and Aerodynamics module interaction
3.7 Application to a Blended Wing Body Dedicated to Long-Haul Operation
The process described above is used for designing a long-haul commercial transport BWB configuration. For such a configuration, the TLAR are detailed in Table 11.1. They are based on the A350-1000 which entered in service in February 2018 (Airbus 2014a,b).
4 Uncertainties in the Context of the Blended Wing Body Breakthrough Configuration
The giving up of current T&W configurations for the breakthrough BWB configurations would only be conceivable if the expected winnings with regard to both economic and environmental concerns are sufficient and reliable. In the current panorama, the aircraft industry works around the very well-known T&W configuration and is benefiting decades of feedback about its design and operation. The aircraft industry is organized around this concept all along its development and exploitation chain: industrial segmentation of aircraft design and manufacturing, airports ground installations, air traffic management, passenger accommodation, etc. The entry into service of so different geometrical configurations such as the BWB could dramatically modify that ecosystem. Thus, the winnings must worth moving from the T&W to the BWB configurations.
At the present time, no BWB has been manufactured and operated for commercial air transport missions. Only flying wing aircraft have been developed in the past or are existing for military missions as long-range bomber, for instance, the Northrop Grumman B-2 Spirit (Holder 1998), or UCAV demonstrator, as the Dassault Aviation nEUROn. Therefore, the practical feedback is very poor and the expected advantages about BWB for commercial air transport missions only come from numerical simulations and model results.
4.1 Description of Considered Uncertainties
4.1.1 Model Uncertainties
With regard to the commercial air transport missions addressed in this chapter, the most significant quantities of interest come from the overall aircraft weight evaluation, expressed as the MTOW, and the fuel weight evaluation FW.
In the context of a complex design process integrating numerous disciplines, the impact of model uncertainties on these two performance results becomes crucial. The multidisciplinary design process for BWB makes difficult to evaluate the impact of uncertainties from one model (resulting from approximations or simplifications) to the overall process results. In order to bring out the effects of model uncertainties on the final BWB performance results, the use of uncertainty propagation methods appears to be of first interest. Numerous variables can affect the MTOW and the FW. Among them, the following variables have been selected based on experts’ experience:
-
the estimated aircraft weight, expressed as the Operating Empty Weight (OEW),
-
the estimated fuel consumption,
-
the thickness ratio of the wing central body.
Operating Empty Weight dispersion
As an output of the Structure module, the OEW accuracy is linked to the model performance for both primary structure and subsystems weight assessment. On the one hand, the primary structure weight assessment is deeply related to the FEM accuracy and the level of details that are integrated to the FEM. On the other hand, the subsystems weight assessment is linked to the representativeness of the reference data or statistic formulations used in the Structure module. These formulations are indeed based on T&W existing aircraft and the reality could be slightly different for the future BWB aircraft.
Because of the strong influence of the weight on the aircraft performance, it is very interesting to assess the impact of the OEW misestimation on the final MTOW and FW results. The development of a new aircraft, even for existing T&W configurations, generally leads to underestimate its effective weight. Thus, the possible OEW dispersion would be higher than the computed value. Based on the experts experience, the dispersion is modeled by a uniform law between 0 and + 10% above the OEW nominal output provided by the Structure module, as illustrated in Figure 11.25. Used as a Mission module input, the OEW impacts at first order the aircraft performance assessment throughout its long-haul mission.

OEW dispersion law
Fuel Consumption Dispersion
The fuel consumption is estimated by the Propulsion module through the modeling of the thermodynamic cycle of a reference engine. This thermodynamic cycle model entails some uncertainties and could lead to a misestimation of the engine performance. As explained in the Propulsion module description, the thermodynamic cycle is based on the GE-90 85B reference engine. In the MDA process, a coefficient of 1.45 is applied on the whole fuel consumption database provided by the Propulsion module in order to adapt the modeled engine to the aircraft category considered in this chapter. The value of 1.45 has been set up by experts experience.
The uncertainties about the fuel consumption could lead to a wrong required total fuel weight to achieve the mission. Thus, it is useful to assess the impact of the fuel consumption misestimation on the final MTOW and FW. Based on the experts experience, the dispersion is modeled by a uniform law between − 5% and + 5% around the nominal fuel consumption coefficient model parameter, as illustrated in Figure 11.26. Used as a Mission module input, the fuel consumption coefficient directly modifies the fuel consumption provided by the Propulsion module for the aircraft performance assessment.

Fuel consumption coefficient dispersion law
Thickness Ratio of the Wing Central Body Dispersion
For a given wing spanwise section, the thickness ratio represents the maximum vertical thickness of the airfoil to its chord. The wing central body overall geometry is mainly driven by the thickness ratio of its longitudinal section. This section is represented by the section 0 in the BWB geometrical parameterization described previously and depicted in Figure 11.27.

BWB section definition
The section 0 airfoil is defined around the pressurized part and the associated primary structure. In the vertical plan, the thickness of the airfoil is constrained by the height of both passenger cabin and cargo hold, as illustrated in Figure 11.27. Thus, the thickness of the section 0 airfoil is the highest of the overall wing central body. In the same way, in the planform, the length of the airfoil is constrained by the maximal length of the passenger cabin to which the engine and control surface lengths are to be added at the rear of the pressurized part. Thus, the length of the section 0 airfoil is the longest of the overall wing central body. As a consequence, all the wing central body is affected by the section 0 airfoil definition and in particular its thickness ratio.
In the current MDA process, the thickness ratio is considered as a design variable and is directly spread within the process without any modification. In particular, the given value directly feeds the Aerodynamics module and contributes to the overall aircraft aerodynamic performance assessment and especially the lift-to-drag ratio. An expected evolution of the MDA process described in this chapter would be to perform a local optimization of the airfoils throughout the wing central body spanwise. In this context, the thickness ratio in the section 0 would more act as a requirement for the airfoil optimization in the related section. The numerous subsystems affected by the section 0 (geometrical definition of the pressurized part, primary structure sizing, handling qualities constraints, etc.) result in a complex optimization problem of the airfoil under the associated constraints. Thus, the final thickness ratio obtained after the local optimization process could slightly differ from the required value.
Because of its influence on the aircraft aerodynamic performance, it becomes fruitful to evaluate the impact of the possible dispersion about the thickness ratio in the section 0 nominal value on the final MTOW and FW. Based on experts experience, the dispersion is modeled by a normal law defined by a mean nominal thickness ratio in the section 0 of 0.15 and a standard deviation of 0.01, as illustrated in Figure 11.28. Used as an input for the Geometry, the Aerodynamics, and the Structure modules, the thickness ratio in the section 0 impacts those three modules.

Thickness ratio in the section 0 dispersion law
4.1.2 Mission Hypothesis Variations
In the MDA process presented in this chapter, the BWB overall performance evaluations are made with the hypothesis of sticking to the typical missions performed by the current T&W configurations and detailed in Table 11.1. Thus, the mission TLAR and parameters are based on the current typical long-haul missions. But, in the context of the breakthrough BWB configuration, the typical long-haul mission could be different and have its own optimal flight conditions. Thus, it becomes interesting to assess the impact of the main mission TLAR and parameters on the aircraft overall characteristics and performances. Among the mission TLAR and parameters, the following variables have been selected because they affect the cruise segment which represents the main mission part and the main fuel consumption source, as illustrated in Figure 11.29:
-
the cruising Mach number,
Fig. 11.29 
Fuel weight breakdown
-
the top of climb altitude,
-
the cruising design altitude.

Cruising Mach Number Variation
The cruising Mach number represents the speed at which the aircraft performs the cruise segment of its mission. It directly affects the aerodynamics behavior and the engines operating point during the cruise segment, and thus the related fuel consumption. In particular, as illustrated Figure 11.10, the higher the Mach number, the higher the engine specific fuel consumption. Because the cruise segment represents the main fuel consumption source among the long-haul mission, it becomes of first interest to assess the effects of a cruising Mach number variation on the final MTOW and FW results.
As illustrated in Figure 11.30, the cruising Mach number variation is modeled by a uniform law between − 5% and + 5% around the nominal cruising Mach number TLAR. The cruising Mach number is used as a Mission module input for the aircraft performance assessment throughout its long-haul mission and also as a Structure module input for computing the load cases related to the cruise segment.

Cruising Mach number dispersion law
Top of Climb Altitude Variation
The top of climb altitude represents the altitude at which the aircraft ends the climb segment of its mission and starts the ascending cruise segment. As for the cruising Mach number, because it directly affects the cruise segment which represents the main fuel consumption sources among the mission, it becomes of first interest to assess the effects of a top of climb altitude variation on the final MTOW and FW results. As illustrated in Figure 11.31, the top of climb altitude variation is modeled by a uniform law between − 10% and + 10% around the nominal top of climb altitude TLAR. As for the cruising Mach number, the top of climb altitude is used as an input for the Mission and the Structure modules.

Top of climb altitude dispersion law
Cruising Design Altitude Variation
Finally, the cruising design altitude represents the mean altitude at which the aircraft performs the cruise segment of its mission. The cruising design altitude is not used by the Mission module which computes the cruise segment only on the basis of the top of climb altitude. The cruising design altitude is only used by the Structure module to compute the load cases related to the cruise segment. Thus, it could affect the primary structure sizing and then the OEW results. The cruising design altitude variation is modeled by a uniform law between − 10% and + 10% around the nominal cruising design altitude model parameter, as illustrated in Figure 11.32.

Cruising altitude dispersion law
4.2 Uncertainty Analysis on the Blended Wing Body
4.2.1 Methodology Used
Table 11.2 summarizes the hypotheses about the 6 considered dispersions.
These dispersions are spread throughout the BWB MDA process presented in this chapter. Figure 11.33 indicates where these dispersions affect the process.

Introduction of the dispersions within the MDA process
As explained above, the six considered dispersion effects are analyzed with regard to the MTOW and the FW. Two types of uncertainty analyses are carried out: a Crude Monte Carlo uncertainty propagation on the coupled multidisciplinary process to evaluate the impact of the input uncertainties on the quantities of interest and a sensitivity analysis using Sobol indices to apportion the variability of the input uncertain variables on the output variables.
The considered multidisciplinary process uses FPI (with Gauss–Seidel algorithm, see Chapter 1) to solve the system of interdisciplinary equations in order to find compatible couplings between the disciplines. In order to visualize the impact of the propagation of input uncertain variables, a Crude Monte Carlo using 103 samples is performed and the distribution of the quantities of interest is analyzed. Then, in a second time, a sensitivity analysis is carried out. Due to the MDA associated computational cost, a direct sensitivity analysis using the exact disciplinary models is intractable. In order to decrease the computational cost, sparse Gaussian Processes (see Chapter 3 for more details on Gaussian Process) are built for the different quantities of interest (MTOW, FW, etc.). A Latin Hypercube Sampling (LHS) is used to generate a Design Of Experiment of 500 samples in the input uncertain space and this DoE is used to build the corresponding sparse GPs. In order to assess the accuracy of the surrogate models, additional 500 LHS samples are used to compare the prediction of the sparse GP and the exact MDA results. An histogram of the error between the sparse GP prediction and the exact MDA results for the FW is represented in Figure 11.34. The error in % is below 1.45% with an mean of 0.08%; therefore, this sparse GP appropriately represents the exact MDA and may be used for sensitivity analysis. Similarly to Chapter 10, a sensitivity analysis is carried out but using the sparse GP instead of PCE to estimate the Sobol sensitivity indices (see Chapter 3 for more details on Sobol sensitivity indices). First order and total order Sobol sensitivity indices are estimated using 106 samples with the sparse GPs. In the following sections, the results of the uncertainty quantifications are analyzed.

Error in % between the exact function and SGP approximate for the MTOW
4.3 Results
4.3.1 Fuel Weight Dispersion Analysis
Figure 11.35 displays the dispersion of the FW with a mean of 141 tons and a standard deviation of 6.7% (9 tons). Figure 11.37 illustrates the associated FW pairplot. Figure 11.36 illustrates the effects of the six previously mentioned dispersions on the FW.

Fuel weight dispersion

Sobol analysis and assessment of the FW sensitivity

FW pairplot
First, the cruising Mach number appears to be the main contributor of the FW dispersion in Figure 11.36. It is used by the Mission module for the mission definition and in particular defines the Mach number at which is performed the entire cruise segment. Its variation affects the performance computation made by the Mission module for the cruise segment and thus the associated fuel consumption. Because the cruise segment represents the main fuel consumption source along the overall mission it then impacts the overall FW. Figure 11.37 indicates that the FW increases with the cruising Mach number. This result is typical of the aircraft performance with the category of engines considered for which the fuel consumption increases rapidly with the speed. This trend is also visible on the engine performances surface provided in Figure 11.10.
The top of climb altitude represents the second contributor of the FW dispersion in Figure 11.36. As for the cruising Mach number, it is used by the Mission module for the mission definition and in particular defines the altitude at which starts the cruise segment which then progressively ascends. Its variation affects the performance computation made by the Mission module for the cruise segment and thus the associated fuel consumption. Figure 11.37 shows that the FW decreases rapidly when the top of climb altitude increases. With the altitude increases, the air density decreases and therefore the required thrust also decreases. As a consequence, the cruise segment fuel consumption decreases. This is typical of the aircraft performance and motivates the typical ascending characteristic feature of the cruise segment.
Then, the fuel consumption coefficient represents the third contributor of the FW dispersion in Figure 11.36. This trivial result highlights the crucial needs for accurate and reliable models for the engine fuel consumption in order to have a good estimation of the FW. Figure 11.37 shows the effects of the fuel consumption coefficient on the FW, which is nonnegligible. This result encourages precise comparisons and validations of the results obtained with the Propulsion module with existing engines of the same category in order to reduce the uncertainties about the fuel consumption coefficient.
To a lesser extent, the OEW represents the fourth contributor of the FW dispersion in Figure 11.36. The OEW directly impacts the aircraft weight considered for achieving its mission and thus the required fuel weight. Figure 11.37 depicts the effects of the OEW on the FW. It confirms the crucial needs for accurate and reliable models for the aircraft weight computation in order to reduce the uncertainties about the OEW.
Finally, the thickness ratio (t∕c) in the section 0 acts as the fifth and last contributor of the FW dispersion in Figure 11.36. It impacts the FW assessment through the overall aircraft aerodynamic performance. The very narrow dispersion considered for the thickness ratio in the section 0 leads to a very low impact on the FW dispersion, as illustrated in Figure 11.37.
Because it is not used by the Mission module for the mission computation, the cruising design altitude does not have any effect on the FW dispersion, as expected.
As a summary of the analysis, the results obtained in both Figures 11.36 and 11.37 confirm the critical impact of the model uncertainties of both fuel consumption evaluation and weight assessment of the FW results. Beside these results, the conclusions provide an interesting feedback about the fact that the flight condition variation also has important effects on the aircraft fuel consumption. These results lead to the conclusion that the optimization of the BWB configuration with regard to its long-haul mission should also consider the cruise segment definition as design variables, and not only the wing body geometrical design parameters. Optimizing jointly the wing body geometry and the cruise segment could thus allow reaching an optimal solution in order to minimize the FW.
4.3.2 Maximum Take-Off Weight Dispersion Analysis
Figure 11.38 shows the dispersion of the MTOW with a mean of 351 tons and a standard deviation of 3.6 % (13 tons). Figure 11.39 illustrates the effects of the six previously mentioned dispersions on the MTOW and Figure 11.40 illustrates the associated pairplot.

MTOW dispersion

Sobol analysis and assessment of the MTOW sensitivity

MTOW pairplot
As expected, the main contributor of the MTOW dispersion is related to the OEW uncertainties. The OEW acts on the MTOW in two ways. First, it directly acts on the MTOW as it represents the main contributor of the MTOW. Figure 11.14 indicates that the OEW means 46.9% of the MTOW, and thus its variations directly affect the MTOW result. It also indirectly acts on the MTOW through its effect on the FW which represents the second contributor of the MTOW, as indicated in Figure 11.14. This snowball effect enhances the critical aspect of the weight computation on the overall aircraft performance assessment. Those results teach us the needs of accurate and reliable models for the aircraft weight computation which represents a critical topic in the context of new aircraft configurations definition. Then, with the exception of the OEW impact which has been addressed above, the sensitivity observed on the MTOW is representative of the one observed on the FW. It means that they mainly affect the FW which then contribute to the MTOW results. All the conclusions made for the FW dispersion are then transposable to the MTOW dispersion throughout the contribution of the FW to the MTOW.
All the sensitivity analyses presented above provide important feedback about the main contributors to both FW and MTOW dispersions. It becomes a guideline about the critical topics to consider for the optimization of the BWB configuration.
5 Perspectives
5.1 Optimization of a Blended Wing Body for Long-Haul Operation
On the basis of the presented MDA, a MDAO process will be built in order to optimize a BWB configuration with regard to a performance objective expressed as the minimization of the fuel weight required to achieve a long-haul commercial transport mission. The optimization would be made under constraints related to minimal performance achievement, structural sizing rules satisfaction, and airport infrastructures compliance.
The conclusions from the described sensitivity analysis will drastically help to guide and speed up the optimization process from the engineer point of view. Among the design variables described in Figure 11.21, a subset would be selected to start the optimization of the BWB configuration. Those first design variables concern the wing body plan form geometry:
-
overall wing span,
-
wing chords of the external wing (i.e., respectively, in Sections 2, 2.1, and 3),
-
leading edge sweep angles of the wing central body (i.e., from Sections 0 to 2),
-
leading edge sweep angles of the external wing (i.e., from Sections 2 to 3).
According to the previous sensitivity results, it appears that the cruising Mach number and the top of climb altitude could have a significant impact on the aircraft performance and in particular on the required fuel weight. Therefore, it would worth reconsidering the cruising Mach number and the top of climb altitude as design variables and no longer as frozen TLAR. The optimization of a BWB configuration for a long-haul commercial transport mission could thus lead to different optimal flight conditions for the cruise segment, in particular about the cruising Mach number. However, the potential evolution of the cruise segment flight conditions should take into account operational constraints as the mission duration acceptable for the passengers. For that purpose a maximal mission duration constraint, assessed on the basis of the existing long-haul traveling time, would be applied. The final result cruise segment flight conditions will emerge from the compromise between a low Mach for reducing the fuel consumption and a high Mach for reducing the mission duration.
5.2 Further Works
The MDAO process presented in this chapter is still in development and enhancements are planned in the next future.
First, the aircraft handling qualities assessment may be added to the MDAO process as a dedicated disciplinary module. It would help to validate the control capabilities of the aircraft for critical flight conditions and if required will act in return on the aircraft geometry in order to improve its controllability (control surfaces resize, center of gravity displacement, landing gears displacement, etc.).
Then, the Propulsion module could be used in order to adapt the engine performances strictly to the design cases along the mission. The engine will thus be sized on the basis of some design cases (i.e., for which the thrust needs are the highest) along the considered mission. This would add a coupling between both Mission and Propulsion modules.
Finally, the introduction of new propulsion architectures could be modeled, in particular semi-buried propulsion which appears to have great advantages on geometries such as BWB configurations (Ko 2003). This would add a strong coupling between both Propulsion and Aerodynamics modules.
References
Airbus (2014a). Airbus family figures, ed. July 2014.
Airbus (2014b). Airport operations. A350-1000 airport compatibility brochure, issue 1, ref. v00pr1413357.
EASA (2014). Certification Specifications and Acceptable Means of Compliance for Large Aeroplanes CS-25.
EASA (2017). Type-certificate data sheet for ge90 series engines.
European Commission (2011). Flightpath 2050–Europe’s vision for aviation maintaining global leadership and serving society’s needs–report of the high-level group on aviation research.
Fredericks, W., Antcliff, K., Costa, G., Deshpande, N., Moore, M., San Miguel, E., and Snyder, A. (2010). Aircraft conceptual design using vehicle sketch pad. In 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA.
Gauvrit-Ledogar, J., Defoort, S., Tremolet, A., and Morel, F. (2018). Multidisciplinary overall aircraft design process dedicated to blended wing body configurations. In 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, Georgia.
Gray, J. S., Moore, K. T., and Naylor, B. A. (2010). OpenMDAO: An open-source framework for multidisciplinary analysis and optimization. In 13th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Fort Worth, TX, USA.
Greitzer, E., Bonnefoy, P., De la Rosa Blanco, E., Dorbian, C., Drela, M., Hall, D., Hansman, R., Hileman, J., Liebeck, R., Lovegren, J., et al. (2010). N+ 3 aircraft concept designs and trade studies. volume 2; appendices-design methodologies for aerodynamics, structures, weight, and thermodynamic cycles. NASA/CR-2010-216794/VOL2, E-17419-2.
Gur, O., Mason, W. H., and Schetz, J. A. (2010). Full-configuration drag estimation. Journal of Aircraft, 47(4):1356–1367.
Haftmann, B., Debbeler, F.-J., and Gielen, H. (1988). Takeoff drag prediction for airbus a300-600 and a310 compared with flight test results. Journal of Aircraft, 25(12):1088–1096.
Holder, W. G. (1998). Northrop Grumman B-2 Spirit: An Illustrated History. Schiffer Pub.
Ko, Y.-Y. A. (2003). The multidisciplinary design optimization of a distributed propulsion blended-wing-body aircraft. PhD thesis, Virginia Tech.
Lambe, A. and Martins, J. (2011). A unified description of MDO architectures. In 9th World Congress on Structural and Multidisciplinary Optimization, Shizuoka, Japan.
Liebeck, R. H. (2004). Design of the blended wing body subsonic transport. Journal of aircraft, 41(1):10–25.
Lowry, J. G. and Polhamus, E. C. (1957). A method for predicting lift increments due to flap deflection at low angles of attack in incompressible flow. NACA Technical Note 3911.
Nickol, C. (2012). Hybrid wing body configuration scaling study. In 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA.
Niţă, M. and Scholz, D. (2012). Estimating the Oswald factor from basic aircraft geometrical parameters. German Aerospace Congress, Berlin, Germany.
Nită, M. F. (2012). Contributions to Aircraft Preliminary Design and Optimization. Ph. D. Thesis, Politehnica University of Bucharest, Bucharest, Romania.
Raymer, D. (2012). Aircraft Design: A Conceptual Approach 5e and RDSWin STUDENT. American Institute of Aeronautics and Astronautics, Inc.
Torenbeek, E. (2013). Advanced aircraft design: conceptual design, analysis and optimization of subsonic civil airplanes. John Wiley & Sons.
Yang, S., Page, M., and Smetak, E. (2018). Achievement of NASA new aviation horizons n+2 goals with a blended-wing-body x-plane designed for the regional jet and single-aisle jet markets. In 2018 AIAA Aerospace Sciences Meeting, AIAA SciTech Forum, Kissimmee, FL, USA.
Acknowledgements
The study presented in this chapter has been funded by ONERA within the internal research project CICAV. This project started in 2015 and lasts 5 years. It implies 4 of the 7 ONERA scientific departments, and the authors would like to specially thank the contributors to the modeling effort within the multidisciplinary design and optimization process described in this chapter:
• Aerodynamics Aeroelasticity Acoustics Department (DAAA): Frédéric Moens, Michaël Méheut, Jean-Michel David, Laurent Sanders and Ingrid Legriffon
• Materials And Structures Department (DMAS): Bernard Paluch
• Multiphysics for Energetics Department (DMPE): Christian Guin and Raphaël Murray
• Information Processing and Systems Department (DTIS): Sébastien Defoort, Franck Morel, Clément Toussaint, Carsten Döll and Romain Liaboeuf
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Gauvrit-Ledogar, J., Tremolet, A., Brevault, L. (2020). Blended Wing Body Design. In: Aerospace System Analysis and Optimization in Uncertainty. Springer Optimization and Its Applications, vol 156. Springer, Cham. https://doi.org/10.1007/978-3-030-39126-3_11
Download citation
DOI: https://doi.org/10.1007/978-3-030-39126-3_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-39125-6
Online ISBN: 978-3-030-39126-3
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)