
Abstract
Nowadays, there is an increasing trend in the use of solar energy by using photovoltaic system (PVS). The power generated by a PVS highly relies on solar intensity. Therefore, a Maximum Power Point Tracker (MPPT) is one of the key components of solar electricity generation. It is used to extract the maximum power point (MPP) produced by a PVS. In this paper, we present a bio inspired Bat Swarm Optimization (BSO) algorithm to track the MPP thereby increasing the performance of the PVS. The proposed BSO algorithm is developed in Matlab/Simulink environment. Furthermore, the results obtained from the BSO algorithm are compared with the well-known conventional Perturb and Observe (P&O) algorithm.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Maximum power point tracking
- Photovoltaic system
- Bio inspired algorithm
- Bat algorithm
- Perturb and Observe
1 Introduction
Since the output characteristics of a photovoltaic panel (PV) depends on the solar radiation, the temperature and the load, the maximum power point (MPPT) is not constant. Therefore, tracking the MPPT of a photovoltaic panel is usually an essential part of photovoltaic system (PVS) since it maximizes the power output of the PVS, and therefore maximizes the PV panel efficiency. Thus, to improve the conversion efficiency of the electric power generation, an MPPT controller is integrated with the PVS so that the PV panel will be able to deliver the maximum power under all variable atmospheric conditions. Therefore, a significant number of MPPT controller have been proposed in the literature and industry [1, 2], starting with conventional method (CM) to soft computing (SC) [3, 4]. The main goal of these MPPT controllers is to extract maximum output power from the PV panel under different temperature and sunlight radiation. Despite the fact that these methods are designed for the same objectives, they differ in terms of complexity, flexibility, convergence speed, cost, hardware implementation and effectiveness [5]. Thus, MPPT based conventional methods are simple, easy to implement and capable of tracking the MPP efficiently in normal conditions. However, they have a drawback related to the continuous oscillations that occurs around the MPP resulting in considerable loss of power during steady state. In addition, none of these methods are capable of handling the problem of partial shading conditions.
In recent years, MPPT based SC are attracting huge interest from research communities. These MPPT are developed and used both to improve the energy conversion efficiency under uniform and non-uniform irradiation and to track the MPP accurately. A large number of MPPT based on these methods has been proposed. These methods can be categorized as Artificial Intelligent Methods (AIM) and Bio inspired Methods (BIM) [6]. The MPPT based AIM [7,8,9], such as Artificial Neural Networks (ANN) requires huge computation time and months of training to ensure the tracking of the MPP. Regarding the BIM, they ensure optimal searching ability without involving excessive mathematical computations [10, 11]. In addition, their implementation simplicity makes them very attractive for solving the MPPT problem.
In this study, an MPPT based BIM is developed, this MPPT is based on a swarm intelligent algorithm namely Bat Swarm Optimization [12, 13] used for maximum power point tracking which is analyzed and compared with the well-known conventional Perturb and Observe (P&O) [14] MPPT controller. The paper is organized as follows, in Sect. 2, we present the system overview of a PVS. Section 3 deals with the techniques of MPPT, where the proposed BSO algorithm is presented, followed in Sect. 4 by the simulation results and Finally, a conclusion is given.
2 System Overview
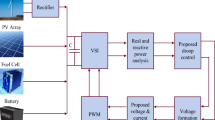
Figure 1 illustrates the whole architecture of a PV system which contains a solar panel for energy extraction from the sun, a DC/DC converter, a resistive load and an MPPT controller.

Photovoltaic system architecture
The equivalent circuit of a solar panel, which is composed of several photovoltaic cells employing parallel, series or series/parallel is depicted in Fig. 2. The model consists of a current source ipv, a diode d and a couple of resistances rs and rp.

Equivalent circuit of a PV cell
Equation (1) show the current produced by the solar cell.
The PV module operation depends strongly on the load characteristics to which it is connected, under constant uniform irradiance the current–voltage (I–V) characteristic has a unique point on the curve, called the maximum power point (MPP), at which the array operates with maximum efficiency and produces maximum output power. Furthermore the characteristics of a PV system vary with temperature (Tc) and insolation (S). Thus, MPPT controller is required to track the new modified MPP in its corresponding curve whenever temperature and/or insolation variation occurs.
3 Bat Swarm Optimization Algorithm
3.1 Bat Swarm Optimization Basic Concepts
The standard BAT search algorithm is a Bio Inspired algorithm developed by Yang [13] in 2010, and used for solving various optimization problems. As depicted in Fig. 3, the algorithm is inspired by the echolocation behavior of natural bats in locating their foods and avoids obstacles.

Echolocation of bat.
When searching for prey, these bats emit a loud and short pulse of sound (wave), wait a fraction of time for the echo to return back to their ears. With this echo, a bat can decide an object’s dimensions, shape, direction, and movement. The loudness increases and decreases when approaching towards prey. Accordingly, bats can determine how far they are from the surrounding objects. In order to transform these behaviors of bats to algorithm, Yang introduced the following rules [13]:
-
1
All bats use echolocation to sense distance, and also can differentiate between food, prey and barriers;
-
2
All bats fly randomly with velocity vi at position xi with a fixed frequency fmin, varying wavelength λ and loudness A0 to search for prey. They can automatically adjust the wavelength (frequency) of their emitted pulses and adjust the rate of pulse emission r in range of [0,1], depending on the proximity of their target;
-
3
The loudness A can varies from a large (positive) A0 to a minimum constant value Amin.
For each bat (i), the position xi and velocity vi should be defined and update during the iterations. The mathematical equations for updating the locations xi and velocities vi can be written as:
where α in the range of [0,1] is a random vector drawn from a uniform distribution, x* is the current global best location, which is achieved after comparing all the locations among all the n bats.
3.2 The Proposed Bat Swarm Optimization MPPT Implementation
This section describes the implementation of the BSO algorithm for solving the problem involved to MPPT controller in PV system. The flow chart of the proposed BSO based MPPT method is depicted in Fig. 4.

Flow chart of the BSO MPPT controller.
The PV power serves as the target function. The function to optimize is PPV = f (VPV). The algorithm starts by having no previous information about the position of the best value (bat).
In the beginning, bats are generated randomly in the interval [0, Vco]. For each solution there is a corresponding fitness function. Based on these solutions, the archive is constructed.
Depending on the region strength, the transition probability of bats is calculated. By successive iteration bats move towards the optimized point i.e. MPP. Figure 5 a–b and c, depicts the different steps according to the fitness function, the restrict search space and bats movement towards the optimized point, i.e. the MPP.

(a) Distribution of the bat population; (b) Echolocation of bat; (c) Bats move towards the optimized point, i.e. the MPP.
4 Simulation Results
For the simulation, we used the Matlab/Simulink environment tools [15]. These facilitate the change of the atmospheric conditions (T°, S) to assess the MPP tracking trajectory, thus several scenarios are developed in order to evaluate the MPPT respond under dynamic operating conditions (Fig. 6).

BSO Power curve under STDC.
The MPPT based BSO algorithm was tested and compared to the well-known Perturb and Observe algorithm P&O.
Firstly, the BSO MPPT controller is simulated at standard conditions STCD (1000 W/m2, 25 °C), then at rapidly changing atmospheric conditions.
The temperature is constant at 25 °C and the irradiance is varying from 500 to 1000 W/m2. The performance of each MPPT controller was evaluated at steady state condition.
Figures 7 and 8 depicts respectively the progression of the output power delivered to the load for the P&O and BSO algorithms under standard conditions (1000 W/m2, 25 °C).

P&O Power curve under STDC.

Power curves of the P&O and BSO under STDC.
As depicted in Fig. 9, the BSO MPPT controller converges rapidly to the MPP. This latter is reached after only 0.7 s with a zero oscillations around the MPP.

Variation of the irradiance level from 500 to 1000 W/m2
Regarding to the MPPT based P&O, results show that the P&O MPPT controller converge slowly, the MPP is reached after 9.8 s with a continuous oscillations around the MPP which cause energy losses.
In the case of rapidly changing atmospheric conditions regarding to irradiance, the condition of changing solar insolation was modeled as depicted in Fig. 9. The temperature is constant at 25 °C and the irradiance is varying from 500 to 1000 W/m2. From these results, it is shown that the BSO controller gives better results compared to P&O controller in terms of power value, time response and oscillations around the MPP. In Fig. 10, it is clearly shown that at 20 s, in the transition of the irradiance from 500 to 1000 W/m2, the BSO MPPT controller follow the variation of the irradiance and track the MPP rapidly, it take negligible time to stabilize with no oscillation around the MPP, whereas for the P&O controller, as illustrate in Fig. 11, its take more time (5 s) to track the MPP and adjust the value of the power, where the oscillations around the MPP are still not eliminated.

BSO Power curve under rapid variation of irradiance.

P&O Power curve under rapid variation of irradiance
5 Conclusion
In this study, a new bio inspired algorithm namely bat swarm optimization algorithm (BSO) used for maximum power point tracking is developed, analyzed and compared to the well-known conventional method with the Perturb and Observe (P&O) MPPT controller. The results show that the BSO gives better performances in term of convergence speed, accuracy, stability and robustness; where the BSO controller reached the MPP speedily with a good accuracy and no oscillation around the point at steady state even for standard condition or when a rapid variation of irradiance occurs compared to the P&O MPPT controller. Regarding to the P&O controllers, the biggest drawback of the controller is due to the multiple oscillations around the MPP, especially under rapid variation of the atmospheric condition. Thus, the BSO can be considered as one of the main competitive algorithms for tracking the maximum power point of a Photovoltaic system under rapid variation of weather (Solar irradiance and Temperature) where it is able to readjust rapidly to the new conditions compared to P&O where it take more time. As future work we aim to test the proposed algorithm to solve the problem of partial shading then propose a hardware implementation for the proposed method.
References
Eason, G., Noble, B., Sneddon, I.N.: A review of improved maximum peak power tracking algorithms for photovoltaic. Int. J. Electr. Eng. Technol. (IJEET) 1, 85–107 (2010). ISSN 0976-6553
Salas, V., Olias, E., Barrado, A., Lazaro, A.: A review of the maximum power point tracking algorithms for stand alone photovoltaic systems. Sol. Energy Mater. Sol. Cells 90, 1555–1578 (2006)
Mellit, A., Kalougirou, S.A.: Artificial intelligence techniques for photovoltaic application: a review. Prog. Energy Combust. Sci. 34, 574–632 (2008)
Mellit, A.: A soft computing technique modeling and simulation of stand alone photovoltaic power supply system. Int. Rev. Electr. Eng. IREE 2(1), 480–488 (2007)
Titri, S., Larbes, C., Youcef Toumi, K.: Rapid prototyping of PVS into FPGA: from model based design to FPGA/ASICs implementation. In: 2014 9th International Design and Test Symposium (2014)
Titri, S., Larbes, C., Youcef Toumi, K., Benatchba, K.: A new MPPT controller based on the ant colony optimization algorithm for photovoltaic systems under partial shading conditions. Appl. Soft Comput. J. http://dx.doi.org/10.1016/j.asoc.2017.05.017
Larbes, C., Ait Cheikh, S.M., Obeidi, T., Zerguerras, A.: Genetic algorithms optimized fuzzy logic control for the MPPT in photovoltaic system. Renew. Energy 34(10), 2093–2100 (2009)
Ait Cheikh, M.S., Larbes, C., Tchoketch Kebir, G.F., Zergueras, A.: Maximum power point tracking using fuzzy logic scheme. Revue des Energies Renouvelables 10(3), 387–395 (2007)
Chekired, F., Mahrane, A., Chikh, M., Smara, Z.: Optimization of energy management of a photovoltaic system by the fuzzy logic technique. Energy Procedia 6, 513–521 (2011)
Hanif Halim, A., Ismail, I.: Bio inspired optimization method: a review. Int. J. Artif. Intell. 1 (2014)
Binitha, S., Siva Sathya, S.: A survey of bio inspired optimization algorithms. Int. J. Soft Comput. Eng. IJSCE 2(2), 137–150 (2012)
Yang, X.S.: BAT algorithm for multiobjective optimization. Int. J. Bio Inspired Comput. 3(5) (2011)
Yang, X.S.: A new metaheuristic bat inspired algorithm. In: Nature Inspired Cooperative Strategies for Optimization, vol. 284. Springer Press (2010)
Liu, X., Lopez, L.A.C.: An improved perturb and observe maximum power point tracking algorithm for PV arrays. In: IEEE 35th Power Electronics Specialists Conference, PESC 2004, pp. 2005–2010 (2004)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Titri, S., Kaced, K., Larbes, C. (2020). Maximum Power Point Tracking Based on the Bio Inspired BAT Algorithm. In: Hatti, M. (eds) Smart Energy Empowerment in Smart and Resilient Cities. ICAIRES 2019. Lecture Notes in Networks and Systems, vol 102. Springer, Cham. https://doi.org/10.1007/978-3-030-37207-1_3
Download citation
DOI: https://doi.org/10.1007/978-3-030-37207-1_3
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-37206-4
Online ISBN: 978-3-030-37207-1
eBook Packages: EngineeringEngineering (R0)