
Abstract
An improved understanding of the fluid-solid interaction associated with a solid body slamming on the water surface is central to the design of naval and aeronautical structures. Of critical importance is the quantification of the hydrodynamic loading experienced by a slamming hull, in relation with its geometric and physical properties along with the conditions of the impact. This book chapter summarizes research supported by the Office of Naval Research, Solid Mechanics Program, at New York University to establish a reliable experimental methodology for the spatially-distributed, temporally-resolved inference of the hydrodynamic loading experienced by a slamming structure. Through the use of particle image velocimetry (PIV), we demonstrate the possibility to infer the hydrodynamic loading on rigid and compliant hulls that enter and exit the water surface, with varying inclination angles and different geometries.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others
Keywords
1 Introduction
Naval and aeronautical structures are routinely exposed to impulsive loading conditions associated with slamming on the water surface. The complexity and significance of water slamming research are exemplified by the hull of a planing vessel that periodically impacts the water as the vessel rises above the water surface and then re-enters with a high velocity, or by the fuselage of an aircraft which must complete an emergency landing on the water. Understanding the physics of water impact is key to the design of high performance structures, which must withstand dramatic slamming conditions, where pressure as high as few megapascal are attained in few milliseconds, thereby eliciting severe stress levels and fatigue, potentially contributing to early failure [1,2,3,4].
The very first studies in this area of hull slamming are the seminal contributions of von Karman [5] and Wagner [6], who first shed light on the phenomenon of added mass, the onset of water pile-up, and the spatiotemporal evolution of the hydrodynamic loading. Since these early endeavors, the community has made several strides in experimental, numerical, and theoretical research, as summarized in the recent review by Abrate [7]. Our understanding of the physics of the impact is, however, far from complete and numerous questions remain open in the mechanics of slamming. Particularly elusive is the transition from stiff metal structures to lightweight composites, which opens the door for a critical reconsideration of the current practice to the design of structures that must withstand slamming loading. The compliance of the impacting structure will cause complex, unsteady fluid-structure interactions which might exacerbate the slamming conditions, but also constitute a design element for improving performance and extend service operation.
I was first exposed to the topic of water entry in the annual reviews of the Office of Naval Research (ONR), Solid Mechanics Program managed by Dr. Y.D.S. Rajapakse around 2010, where I learnt from experts in the U.S., Europe, and Oceania what were the key challenges in the design of composite materials for use in ship hulls. The more I saw about the sophisticated models by Abrate [8, 9] and Batra [10,11,12,13,14] and the impressive experimental setups by Battley [15,16,17,18,19] and Rosen [20,21,22,23], the more it became apparent to me that there was a profound need for an experimental technique that could offer spatially-resolved data about the hydrodynamic loading experienced by structures during slamming events.
Mathematical models are hungry of experimental data. Just as they need experimental data to be formulated from first physical principles, they require data for calibration of their parameters and validation against independent observations, prior to being effectively used for quantitative predictions and structural design.
In the context of slamming problems, the hydrodynamic loading experienced by the impacting solid is influenced by the motion of the solid itself (let it be a rigid body motion or a complex elastic deformation), resulting into an authentic unsteady fluid-solid interaction problem. Hence, experimental data should encompass measurements of the fluid flow, that is, the velocity and the pressure field during slamming. The limited availability of these experimental data was one of the main drivers for me and my group to embark on the experimental visualization and analysis of the flow physics associated with slamming.
Not only I realized that there was a paucity of velocity and pressure data, but also I apprehended that available measurements of hydrodynamic loading were restricted to the direct evaluation of the pressure field at specific locations on the slamming structured through mounted pressure gauges [18, 19, 24,25,26,27]. While this approach provides accurate pressure measurements, it is limited to local observations and often practically unfeasible, for the need to instrument the body and run wires throughout.
Motivated by these technical needs, some of my related work on particle image velocimetry (PIV) [28, 29], and recent advancements in the use of PIV data to indirectly reconstruct hydrodynamic pressure, I began a research program that would bring PIV into the study of slamming problems. PIV is the gold standard technique in experimental fluid mechanics. In a typical PIV experiment, the fluid is seeded with micro-particles, and is illuminated on a two-dimensional plane by a laser sheet. A high-speed camera is utilized to acquire consecutive images of the particles, which are then cross-correlated within small interrogation windows to estimate the velocity field in the fluid domain [30].
From knowledge of the velocity field, it is possible to infer the pressure field through post-processing. The recent review by van Oudheusden [31] is an excellent starting point to delve into available approaches for PIV-based pressure inference and apprehend an overview of the state-of-the art on the topic. Either starting from Navier-Stokes or Poisson equations , one can establish a linear boundary value problem for the pressure field, where the PIV velocity enters like a forcing term to the equations. By discretizing the region of interest into a grid, associated with the availability of PIV measurements, it is possible to reconstruct the pressure everywhere in the fluid domain.
Several authors have reported successful use of PIV data in the reconstruction of aerodynamic and hydrodynamic loading on immersed objects and flow channel walls [49,50,51,52,53] and in the study of free-surface flows [54]. However, the use of PIV for slamming problems was relatively untouched when we started our research. The only exception was the work of Nila and colleagues [55], which appeared at the very same time of our first paper on PIV-based pressure reconstruction during slamming in 2013 and is significantly different than our work in at least three aspects: the use of wedges with large deadrise angles that prevent the onset of large impulsive loadings, the constant entry velocity, and the need of additional computational data to enforce boundary conditions.
Table 1 chronologically summarizes our endeavors at New York University (NYU), under the support of the ONR Solid Mechanics Program to thoroughly demonstrate the use of PIV-based pressure reconstruction in hull slamming and tackle the analysis of a number of related fluid-solid interaction problems that were not completely clear and could benefit from PIV. Starting from the free fall symmetric water entry of a rigid wedge, we pursued several research areas, seeking to elucidate how geometry, physical properties, and impact conditions contribute to the fluid-solid interaction underpinning hull slamming.
The rest of the book chapter is organized as follows. In Sect. 2, we touch on the seminal work of von Karman [5] and Wagner [6] to offer some context regarding the physics of hull slamming, on which one can gain a better appreciation of our technical advancements which are summarized in this chapter. In Sect. 3, we describe the experimental setup which we have refined over the years to support the study of hull slamming problems through PIV. In Sect. 4, we articulate our approach to PIV-based pressure reconstruction, spanning the use of Navier-Stokes and Poisson equations , as well as extension to the study of three-dimensional phenomena. Section 5 offers validation in favor of our approach through comparison of PIV-based pressure inference with direct measurement using independent sensors and assessment against synthetic datasets. In Sect. 6, we briefly illustrate the application of our approach to two exemplary problems, for which observations were not previously available. Section 7 summarizes the main conclusions of our work, touches on ongoing work, and identifies avenues of potential future research.
2 A Jump in the Early 1900 to Gain Some Physical Insight
An excellent start to appreciate the physics underlying water entry problem is the recent review paper by Abrate [7], who masterfully laid a detailed history of early research on water entry by giants like von Karman [5] and Wagner [6] 90 years back.
With respect to the free fall of a wedge that is vertically entering the water surface, second Newton law will yield
where t is the time variable, ξ is the entry depth with respect to the unperturbed water surface, Mdry is the mass of the wedge, and Madded is the mass of water that is displaced during the impact. Eq. (1) assumes that the only force acting on the wedge during impact is given by the added mass phenomenon, neglecting gravity, drag, and surface tension, among other phenomena that might be considered during slamming.
In two-dimensions, added mass is estimated by hypothesizing that the wedge will displace half of a cylinder of water of height equal to the width of the wedge W and radius given by the wetted length of the wedge r, as shown in Fig. 1. More specifically, we can write the added mass as
where ρ is the water density. While this may seem a very crude estimation of the physics of the impact, in reality it works really well for predicting the time evolution of the entry depth of a rigid wedge, provided we can estimate properly the wetted length during impact.

Sketch of a wedge symmetrically impacting the water surface, showing the fluid mass displaced during water entry and the pile-up phenomenon. For clarity, we also display relevant symbols: entry depth ξ, wetted width r, and nominal wetted width r∗
Due to the piling-up of water during water entry, the wetted length will be different from the nominal wetted length r∗, which one may compute by simply taking the intersection of the wedge with the undisturbed free surface of the water. For a wedge with deadrise angle β, the nominal wetted width is r∗ = ξ/tanβ and we hypothesize that the wetted width is proportional to r∗ through a constant proportionality factor γ, called pile-up coefficient.
For wedges with low deadrise angles, Wagner estimated the pile-up coefficient from classical potential flow theory to be π/2. An elegant framework for deriving the pile-up coefficient can be found in the work of Korobkin, in which a so-called Wagner condition for the determination of the pile-up coefficient is presented in an integral form, to guarantee that the free-surface elevation at the location of the jet roots equals the vertical location of the entering wedge [56, 57]. Should one vary the shape of the impacting body or release the assumption of rigidity, one would discover different values of the pile-up coefficient, which can potentially vary in time due to hydroelastic coupling as we demonstrated in our previous work [36, 43].
For Eq. (1), initial conditions at t = 0 are ξ = 0 and \( \dot{\xi}={V}_0 \), where V0 is the impact velocity. Integrating once Eq. (1) with respect to time and imposing the initial condition on the velocity, we discover
Upon using Eq. (2) and replacing for the wetted length in terms of the entry depth, we determine the following first-order nonlinear differential equation with homogeneous initial condition:
To compute the impact force, we only need to calculate the acceleration of the wedge and multiply by the dry mass. The acceleration is computed by differentiating Eq. (4) with respect to time so that
Following the line of argument by Abrate [7], one may establish a closed form solution for the peak force experienced by the wedge, as well as the time at which such a force is attained.
Upon knowledge of the entry depth as a function of time, we can embark on the computation of the hydrodynamic loading on the wetted surface of the wedge. Specifically, assuming that the wedge can be assimilated to a flat plate of semilength equal to r, one can exactly solve the potential flow problem everywhere in the fluid. In this context, one assumes that three-dimensional effects are secondary and that the flow is irrotational and incompressible. By replacing the expression of the velocity potential in the complete, nonlinear, Bernoulli’s equation, one can find the following expression for the pressure:
where x runs from the keel to the wetted length, parallel to the undisturbed water surface. In Eq. (6), the first two terms on the right hand side correspond to the time derivative of the velocity potential, while the latter term comes from the nonlinearity in Bernoulli equation.
An example of Eq. (6) is shown in Fig. 2, where we display several pressure distribution as time advances. The location of the peak pressure is nearly constant and a local minimum is always seen at the keel. We also observe a singularity as x tends to r, whereby the pressure tends to negative infinity at the intersection between the body and the free surface, so that negative pressure values are predicted therein.

Normalized pressure (scaled by ½ ρ V02) as a function of the vertical coordinate y, ranging from – ξ to (r tanβ - ξ) ≡ ξ (π/2–1) for different times obtained from Wagner’s solution for a wedge with 25° deadrise angle entering the water at 3 m/s. Reproduced from [33]
3 Experimental Setup at NYU
Here, we explain our experimental approach to the study of water entry problems . We begin by illustrating the latest, most complete experimental apparatus we assembled for the study of water impact problems. Then, we detail our data acquisition system, comprising traditional sensors for the measurement of position, acceleration, and pressure, and the PIV system used for distributed velocity measurement in the fluid.
3.1 Apparatus
From the start of our research on hull slamming at NYU in 2012, we assembled several experimental apparatuses, and, as it typically happens in experimental research, it took several years to finally construct a robust, versatile, and reliable setup. The setup was put together by Drs. Jalalisendi and Russo (then NYU Ph.D. student and visiting student from Parthenope University, Italy), as described in [47]. The custom-made drop tower consisted of a transparent tempered water tank (800 mm long, 320 mm wide, and 350 mm deep) and a free fall mechanism, as shown in Fig. 3(a).

Illustration of the NYU experimental apparatus: sketch of the front view (a), showing the automatic release system, the instrumented wedge, and the heel angle θ. Illustration of the wedge at the onset of the entry along with other relevant geometric parameters, including the inclination α, the displacement ζ and its components as χ and ξ, and the entry velocity V0 (b). Reproduced from [47]
The free fall mechanism was the key element of the drop tower. It comprised of a 1.5 m aluminum rail and a carriage system, fabricated as a 3D-printed cart rigidly attached to an aluminum arm. The carriage system could be connected to a wedge or others objects with different geometries, concave or convex. Of the free fall mechanism, we could control both the inclination, α, and the heel angle, θ, defined in Fig. 3(b). The inclination was manually controlled by adjusting the inclination of the rail, and the heel angle was manually selected via an ad hoc realized junction. To control the release of the carriage system, we used an electric magnet, powered by a continuous voltage supply.
Should one be interested in water exit problems, where the impacting body shall be actuated to reverse its motion during impact, or in shallow impact problems, where there is the potential of damage to the tank, it is recommended to opt for a pneumatic control system, in place of the free fall mechanism. As detailed in [42], a viable pneumatic control system could be assembled by using an air cylinder, an electronic control valve, and an external air compressor, commanded by a DAQ card.
Throughout our work, we fabricated several specimens to simulate a variety of geometries that are representative of ship hulls, as detailed in [36]. Generally, these specimens were assembled by gluing balsa wood panels to 3D-printed models using epoxy resin. The models consisted of an array of parallel ribs to ensure that the specimen would be lightweight and to facilitate the housing of pressure sensors. The surface of the wood panels was waterproofed via a layer of epoxy resin, that minimized wood degradation over time.
3.2 Data Acquisition and Analysis
In our experiments, data acquisition was based on an array of sensors installed in the carriage system and in the drop tower, along with a time-resolved PIV system.
Three types of sensors were utilized in the experiments, namely:
-
One linear position sensor was mounted on the rail to measure the displacement of the carriage system during free fall and during impact. The potentiometer was operated via a spring-loaded wiper installed on the cart, which would touch the position sensor to signal its location.
-
Three accelerometers of varying ranges were mounted on the aluminum arm of the carriage system, within a sealed box. Two piezoelectric accelerometers with a dynamic range of ±20 g and ±200 g were utilized to quantify the acceleration during water impact, thereby affording the estimation of the total force exerted by the water. A capacitive accelerometer with a smaller ±3 g range was used to measure the acceleration during free fall, toward the accurate inference of the entry velocity through integration in time.
-
Two injection control pressure sensors were installed on the wedge to acquire a point measurement of the hydrodynamic loading during water entry. The sensors were mounted using two ABS 3D-printed supports, flushed with respect to the surface of the wedge. To mitigate thermal shock, the tip of each sensor was covered with a double layer of electrical insulating tape. The sensors were connected to a series signal conditioner, supplying the voltage bias and the current feed.
All these data were automatically acquired at a sampling frequency of 10 kHz from the release of the magnet via a DAQ board, controlled via a LabVIEW flow-sheet.
PIV requires seeding the water tank with particle tracers, whose size must be chosen according to the expected flow physics and the available hardware. In our experiments, we typically worked with hollow glass spheres or polyamide seeding particles of diameter on the range of 50 μm. Although we experimented with three-dimensional measurements as well in [37, 38], considerable physical insight into water entry can be garnered by simply using a planar system with a measurement plane at the mid-span of the sample, where three-dimensional effects are secondary. In our setup, such a plane was created by reflecting a laser sheet from the laser source via a 45°-inclined mirror which was installed below the tank.
Critical to the success of the experiments are the spatial and temporal resolutions of the high speed camera used for PIV acquisitions. From our first experiments in 2012 to the most recent ones, we improved the time resolution from 4 to 6 kHz and the spatial resolution from 980 × 640 pixels with 8 bits in grayscale to 2048 × 520 pixels and 12 bits. In our most recent experiments, we worked with a NAC MEMRECAM HX-5 high speed camera and a Dantec Dynamics Raypower 5000 laser at a wavelength of 532 nm. Earlier experiments used one or two high-speed Phantom cameras V.9.1. We typically analyzed PIV data from the instant when the keel touched the water surface for approximately 100 frames.
In our work, we extensively utilized the open source Matlab GUI “PIVlab” [58, 59] for PIV analysis. This software constitutes an excellent choice for data analysis, due to its versatility and ease of use. Typically, we have employed a fast Fourier transform multigrid scheme with a 50% interrogation window overlap, a decreasing interrogation window of 64 × 64, 32 × 32, and 16 × 16 pixels, and a 2 × 3 Gaussian scheme for subpixel interpolation. Working with a field of view of about 100 mm in length, the approximate pixel size is of the order of 0.1 mm, which will yield an interrogation region of about 1 mm2. PIVlab will output a velocity vector for each interrogation window, partitioning the image. From the images, we also manually identify the free surface and wedge boundaries by placing an image mask on each frame via a Matlab script. The motion of the mask could, in turn, be useful to estimate the wetted width and the motion of the body.
4 PIV-Based Pressure Reconstruction
Here, we summarize our approach to estimate the pressure field from planar PIV data through incompressible Navier-Stokes equations [33] and synoptically introduce pressure reconstruction from Poisson equation, to reduce experimental uncertainties [39], as well as three-dimensional pressure inference [37, 38].
4.1 Pressure Reconstruction Using Navier-Stokes Equations
In [33], we proposed a novel experimental approach to estimate the pressure field everywhere in the fluid from planar PIV data. Neglecting gravity, viscosity, and compressibility, the incompressible Navier-Stokes equations read as follows [60]:
where u and v are the velocity components along the x and y-directions, respectively; p is the pressure; ρ is fluid density; and t is time.
From PIV, one can directly estimate the velocity components in Eqs. (1a) and (1b) everywhere in the fluid domain (Fig. 4). The pressure field is then inferred from Eqs. (1a) and (1b) through the following steps [33]. First, we compute the derivatives of the velocity field in Eqs. (1a) and (1b) by using the multidimensional spline smoothing algorithm [61]. With reference to Fig. 3, we set the pressure to zero at a point A on the free surface , away from the wedge. Then, forward integration of Eq. (1a) is used to compute the pressure along \( {\mathcal{E}}_1 \) starting from A; upon reaching the end of the line, we change direction to integrate Eq. (1b) along \( {\mathcal{E}}_2 \). Once, the pressure along \( {\mathcal{E}}_1 \) and \( {\mathcal{E}}_2 \) is known, we calculate the pressure everywhere in the fluid using a spatial eroding scheme of [62]. This procedure is repeated at each time frame, as further explained in [63]. The approach is entirely based on PIV recordings, so that no extra information is required for the computation of the pressure field, beyond the physical constant ρ.

Few steps for reconstructive the pressure field from PIV images. A representative PIV image during water entry of a rigid wedge with overlaid notation (a). PIV image with overlaid velocity vectors, and wetted, reference wetted widths (b). Schematic of a uniformly spaced PIV grid, illustrating the image masking, location of the Cartesian coordinate system, velocity components u and v, path for pressure integration, and entry depth ξ (c). Reproduced from [63]
From the knowledge of the pressure field , one can determine the hydrodynamic loading by simply evaluating the pressure on the wetted surface of the wedge. The total force is computed by taking the integral of the hydrodynamic loading on the wetted surface.
The role of viscosity and gravity on the reconstructed pressure field was studied in [42] in the complex case of water entry and exit of a compliant wedge. Specifically, Fig. 5 shows the pressure reconstructed at several locations on a flexible wedge made of aluminum with a 25° deadrise angle, which is controlled to enter and exit the water surface through a pneumatic actuator. When accounting for gravity , we modify Eq. (1b) by including ρg on the right hand side. In general, the presence of gravity does not lead to significant variations in the pressure inference, except for a modest change at the onset of water exit, where the wedge attains its maximum entry depth before reverting its motion.

Hydrodynamic loading on a compliant, aluminum wedge at ((a) and (d)) 10 mm, ((b) and (e)) 20 mm, and ((c) and (f)) 30 mm from the keel, considering the presence of ((a)–(c)) gravity and ((d)–(f)) viscosity. The vertical solid line identifies the beginning of the water exit. Reproduced from [42]
For the same problem of water entry and exit, Fig. 6 shows results on the total force experienced by the flexible wedge along with its rigid counterpart. Consistent with the discussion above, we do not register any appreciable effect of gravity on the total force. When accounting for viscosity, by modifying Eqs. (1a) and (1b) through the inclusion of a diffusion term, we do not find any noticeable effect.

Total force per unit width on ((a) and (c)) rigid and ((b) and (d)) compliant wedges,considering the presence of ((a) and (b)) gravity and ((c)and (d)) viscosity. The vertical solid line identifies the beginning of the water exit Reproduced from [42]
4.2 Advancements of the Approach
Over the years, we explored two potential avenues of improvement of the proposed pressure reconstruction scheme. In an effort to reduce uncertainty in the inference, we considered a Poisson-based numerical integration. In this vein, rather than integrating Eqs. (1a) and (1b), one would work with the classical Poisson equation
Boundary conditions for Eq. (2) depend on which portion of the PIV image is examined. Specifically, we set the pressure to zero somewhere on the free surface (points A and B), and then we integrate Eqs. (1a) and (1b) along the rest of the free surface, \( {\mathcal{S}}_{\mathrm{SR}} \) and \( {\mathcal{S}}_{\mathrm{SL}} \), and then on the boundary of the recorded image in the fluid, \( {\mathcal{S}}_{\mathrm{BR}} \), \( {\mathcal{S}}_{\mathrm{BB}} \), and \( {\mathcal{S}}_{\mathrm{BL}} \), as shown in Fig. 7(a). For the rest of the fluid boundary in contact with the impacting body, we set the derivative of the pressure along the normal, by using Eqs. (1a) and (1b) once more. To solve Eq. (2), we used a time marching algorithm with a grid that is consistent with the PIV data matrix, as sketched in Fig. 7(b).

Computational details for the implementation of the Poisson solver. Schematic of the stencil used to discretize the Poisson equation, along with the definition of all symbols used in the solution (a). Schematic of the procedure used to treat Neumann boundary conditions: the fluid points Q1 and Q2 (dots) are utilized to reconstruct the pressure at ghost point G (open circle) close the wedge boundary (b). Reproduced from [39]
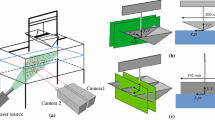
Another major research thrust has been the extension of the approach to three-dimensional problems, where no data was previously available. Specifically, we sought to clarify how much the pressure would vary along the width of a wedge to justify the classical assumption of planar flow, and, at the same time, establish a reliable approach to examine the pressure field associated with the impact of bodies of complex geometries. Using a traditional planar PIV system, we proposed to estimate the full three-dimensional velocity field in the fluid by measuring the two-dimensional velocity field on several planes along both the length and width of the body, as shown in Fig. 8. We performed two sets of PIV trials on multiple cross-sections of the wedge. In the first set, the PIV plane was orthogonal to the sample width, and its location was varied along the width to estimate the cross-sectional velocity components. In the second set, we rotated the measurement plane to record images orthogonal to the length, and its location was varied along the length to acquire the axial velocity component. From these sets of measurements, we estimated the three-dimensional velocity field everywhere in the domain via a cubic spline interpolation scheme.

Methodology to reconstruct the pressure field around a wedge in three dimensions from multiple planar PIV measurements. Schematics of the experimental apparatus with representative location of the laser source and the high-speed cameras (a). Illustrations of the measurement planes for PIV analysis in: cross-sectional (b) and axial (c) PIV. Reproduced from [37]
Upon the knowledge of the three-dimensional velocity field, we estimate the pressure field by looking at each of the cross-sectional planes and integrating incompressible Navier-Stokes equations. Due to the three-dimensional nature of the fluid flow, Eqs. (1a) and (1b) of these equations should be changed to account for convection and, if viscosity is retained, diffusion along the width. However, all these additions are known from PIV measurements and the integration can be performed following the same procedure as described above. Notably, such a modification of Eqs. (1a) and (1b) has a minimal role on the pressure estimation for a wedge, whereby one would obtain the same prediction for the force by simply adjusting the PIV velocity field to the one corresponding to that particular plane [41]. However, when working with solid bodies with curvature along two planes, it is important to account for the axial flow in the estimation of the pressure field, which would otherwise be overestimated [38].
5 Validation of PIV-Based Pressure Reconstruction
Our approach to validate PIV-based pressure reconstruction proceeds along two independent avenues. One avenue consists of the mere comparison between direct readings from the available sensor array. The other entails the creation of a synthetic dataset based on computational fluid dynamics (CFD), on which we could test the approach without confounds from experimental uncertainty and, potentially, unaccounted physical phenomena. Together, these two routes offer robust validation and guidance on ways to improve the process of data collection and analysis.
5.1 Validation Through Experimental Measurements
Experimental validation was conducted in our recent work [47] through experiments on a rigid wedge with length of 19 cm, width of 20 cm, and deadrise angle of 37°. While experiments presented therein include a very wide set of combinations of the inclination and heel angle, for validation purposes it is sufficient to focus on the case of vertical, symmetric impact (both angles equal to zero). The analysis of this specific experimental condition was, in fact, the object of a conference paper by our group [64].
From these data, in Fig. 9, we report velocity and pressure fields at t = 5, 10, and 15 ms. In agreement with our intuition, we observe that both the velocity and pressure are maximized in the pile-up region during the whole entry and they decay away toward the water bulk. Consistent with the classical Wagner theory, the pressure on the wetted surface of the wedge decreases from the pile-up region to the keel, where we register the smallest pressure values. Moving from the keel to the pile-up, we discover that the vertical component of the velocity changes its sign, pointing downward toward the keel and then upward in the pile-up where the water raises to form the jets. On the other hand, the horizontal velocity component continuously increases from zero to its maximum.

Acquired high speed images overlaid with velocity vectors and contour map in m/s (left panels) and contour plots of the pressure magnitude in kPa (right panels). Reproduced from [64]
To begin the assessment of PIV readings against direct sensor measurements, in Fig. 10(a), we compare the entry depth acquired by the position sensor, estimated from the integration of the accelerometer data, and estimated from masking of the PIV images. With respect to impact speed, in Fig. 10(b), we compare the wedge velocity obtained from differentiation of the position sensor data, estimated from the integration of the accelerometer data, and inferred from the PIV velocity of the fluid flow. Our results demonstrate a good agreement between PIV measurements and data obtained from the sensor array, except of the velocity estimate at the very beginning of the impact. As originally discussed in [33], such an underestimation should be ascribed to the fact that PIV provides only an average estimation of the velocity inside each of the interrogation region. Due to the large velocity gradients at the onset of the impact, such an averaging process will translate into an underestimation of the velocity throughout the fluid.

Time histories of the averaged: entry depth ξ (a) and velocity \( \dot{\xi} \) (b). Results are computed using three approaches, while averaging on five trials for accelerometer and position sensor. Reproduced from [64]
Beyond kinematic data, in Fig. 11(a), we demonstrate the accuracy of PIV-based pressure reconstruction by comparing against direct pressure measurements through pressure sensors symmetrically located 47 mm from the keel. Results indicate remarkable agreement between indirect PIV-based pressure measurements and direct observations. Interestingly, although pressure readings start at approximately 5 ms, when the velocity at the keel is still considerably underestimated by PIV, we do not register any effect on the accuracy of PIV-based pressure inference away from the keel.

Pressure signals at pressure sensors locations from PIV and pressure transducers (a) and time histories of the averaged force per unit length obtained from PIV and accelerometer data (b). Note that the M in (b) is the mass per unit width of the wedge. Reproduced from [64]
As a further independent assessment, in Fig. 11(b), we compare the force per unit width obtained by integrating the PIV pressure on the wetted surface with the estimation of the total force obtain by scaling the accelerometer data by the dry mass of the carriage. In agreement with our expectations, the total force is underestimated at the onset of the impact, where we see large velocity gradients. The peak of the force is slightly smaller in PIV-based measurements, likely due to three-dimensional effects which are neglected in this analysis.
5.2 Validation Through Synthetic Data
While experiments are the cornerstone against which we must validate our approach to the inference of the pressure field, a number of technical limitations may suggest a complementary approach to validation. First, measurements acquired through pressure sensors can only acquire local data, which may not suffice for a comprehensive validation of the pressure field, and accelerometer data can only help to resolve the total force on the wedge. Second, pressure sensors are subject to noise, thermal shock, and potential drift, which could challenge validation. Third, without a trustworthy ground-truth it is difficult to understand the role of experimental settings, such as the spatial resolution of the camera and its acquisition frequency.
To address these limitations, we embarked on a thorough assessment of PIV-based pressure reconstruction through synthetic datasets, in which PIV parameters could be systematically varied, without experimental confounds. Toward this aim, we implemented a direct computational framework to study the two-dimensional flow physics associated with the water entry of a rigid wedge. Water and air were treated as immiscible phases and their relative motion was utilized to identify the evolution of the free surface. The entering wedge was described as a moving wall, which translated vertically following our experimental observations in [33].
Figure 12 shows velocity contours from simulations and experiments. While in the water bulk the velocity fields display patterns that are highly comparable qualitatively and quantitatively, we register some differences between simulations and experiments in the pile-up region. First PIV cannot capture the onset of the water jets, whose extent was too small to be experimentally resolved. In addition, PIV reports a lower pile-up compared to CFD and, as a consequence, the maximum velocity identified through PIV is lower than numerical predictions. Likely, this is due to the averaging process that is inherent to the finite size of the interrogation windows in PIV.

Comparison between numerical and experimental velocity fields for a wedge with 25° deadrise angle. The color-bar represents the fluid velocity magnitude in m/s: t = 5 ms (a), t = 10 ms (b), t = 15 ms (c), and t = 20 ms (d). Reproduced from [35]
Working with synthetic data on the velocity field, one can test the feasibility of our approach to PIV-based pressure reconstruction through direct comparison with CFD predictions of the pressure field. By using the same PIV settings of [33], we inferred the pressure distribution on the wedge and compared with CFD predictions, as shown in Fig. 13. The comparison indicates excellent agreement with CFD, although some discrepancies are registered in the early stage of the impact, when the reconstructed maximum pressure is lower than expectations. Such a behavior could be associated with the few vectors over which the pressure is reconstructed. As time progresses, the pile-up region grows, resulting in a larger number of vectors. Increasing the spatial resolution of the measurement and the acquisition frequency could help improving on the pressure inference. The latter is particularly important, whereby we documented a stronger dependence of the pressure reconstruction algorithm on the acquisition frequency than the spatial resolution in [35].

Comparison between CFD results (solid lines) and pressure reconstruction from a synthetic dataset (dashed lines) for the normalized hydrodynamic pressure (using the entry speed and the water density) on the wetted surface of the wedge at several instants. Reproduced from [35]
6 Exemplary Applications
Here, we demonstrate the use of the proposed PIV-based approach to tackle two distinct problems, with relevance to the design of advanced marine vessels. Specifically, we summarize our recent work on the asymmetric and oblique water entry of a rigid wedge [47] and water entry of a compliant wedge constituted by two panels of vinyl ester/glass syntactic foam [44].
6.1 Asymmetric and Oblique Impact of a Rigid Wedge
Extending the results from Sect. 5.1, we examined asymmetric and oblique impact of a rigid wedge entering the water surface in free fall. With reference to the nomenclature in Fig. 3(b), we demonstrate the velocity and pressure field in case of symmetric (Fig. 14(a)), asymmetric (Fig. 14(b)), oblique (Fig. 14(c)), and asymmetric and oblique impact (Fig. 14(d)). Results on symmetric impact are just an instance of those presented in Fig. 9, which suggest that the velocity and pressure data are maximized in the pile-up regions and decrease toward the fluid bulk.

Normalized velocity (scaled by the entry speed scaled by V0; left column) and pressure (scaled by ½ ρ V02; right column) fields in the fluid at t = 3.33 ms for different values of α and θ. The chosen time corresponds to the peak force observed for the case of combined oblique and asymmetric impact (α = 30° and θ = 30°). Reproduced from [47]
More intriguing are the experimental observations for the other impact conditions. Inspection of the results on asymmetric water entry in Fig. 14(b) suggests that the velocity and pressure are again maximized in the pile-up regions, like the symmetric impact. However, the values of the velocity and pressure in the left pile-up are larger than those in the right pile-up. For the oblique case in Fig. 14(c), the velocity and pressure on the left side of the wedge are slightly higher than those on the right side due to the velocity angle, which causes the left side of the wedge to push more water than the right side.
Interestingly, the case of combined oblique and asymmetric impact in Fig. 14(d) is similar to an asymmetric impact, suggesting that the heel angle has a dominant role on the flow physics, more than the velocity angle. However, asymmetries in the velocity and pressure distributions are magnified by the combined effect of α and θ. Hence, the velocity at the keel reaches values close to those in the left pile-up and the pressure in the left pile-up is larger than the values shown in Fig. 10(b). The onset of ventilation that is observed in this experimental condition might be explained by the increase in the velocity at the keel.
To further detail the effect of θ and α on the impact, we examined the energy exchange during water entry. Specifically, we computed the amount of energy that the wedge imparts to the fluid during the impact, by assuming that damping was absent. Following our previous work [36], we decomposed the energy of the fluid into energy of the risen water (pile-up regions and the water jets) and the energy of the bulk, evaluated from PIV. Figure 15 shows the time evolution of the ratio between the energy of the risen water and the total energy of the system (estimated from the initial potential energy of the wedge).

Energy transferred to the risen water Erisen (t) calculated as the percentage of the total energy of the wedge EWedge (t) for all the considered combinations of the heel and velocity angles. Results are averaged across trials, and shaded areas indicate one standard deviation. Reproduced from [47]
Predictably, in all the experimental conditions, the fraction of the energy released to the pile-up and water jets increases in time, reaching 40–60% of the total energy. Increasing the heel angle results in a steep increase in the energy transferred to the risen water region during the early phase of water entry.
6.2 Impact of a Composite Wedge
Recently, we have attempted at a detailed experimental analysis of the water entry of highly compliant composite wedges consisting of syntactic foam panels. Syntactic foams are lightweight composites which are fabricated by dispersing hollow microballoons in a matrix material [65]. The inclusions create a closed-cell microstructure which can be leveraged to reduce weight, improve mechanical properties, and mitigate moisture absorption. These propitious attributes have prompted the use of syntactic foams in marine vessels and aircrafts, as core materials for sandwich composites [66].
While several studies have examined the response of syntactic foams to Izod impact, Charpy Impact, and drop weight as reviewed in [67], experiments on syntactic foams subjects to slamming were not available. To fill this knowledge gap, we extended our PIV-based analysis to the study of slamming response of syntactic foams panels, with vinyl ester matrix and glass particles. The panels were assembled in a wedge of 10° deadrise angle, which entered in free fall the water surface. Two microballoon densities were examined to elucidate the role of syntactic foam composition on slamming response. Specifically, we maintained the volume fraction of the glass particles at 60% and chose two densities (220 and 460 kg/m3), resulting into two types of syntactic foam: VE220–60 and VE460–60.
In Fig. 16, we report PIV results for the drop of VE220–60 and VE460–60 syntactic foam wedges with an entry velocity of approximately 2.75 m/s. Interestingly, the deformation of the panel is not captured by the fundamental in-vacuum mode shape of a cantilever beam. Rather, we register the presence of higher vibration modes, which cause the curvature of the panel to change sign along its span. While the heavier panel was able to withstand the impact, the lighter one failed between 7.5 and 12.5 ms, close to the keel, prompting flow recirculation in the vicinity of the keel. The detachment of the panel from the holding frame forces the water to roll around it, creating a vortical structure that may be seen from the presence of closed velocity contours close to the keel.

High-speed images overlaid with velocity magnitude in m/s for (a–c) VE220–60 and (d–f) VE460–60, at different time instants: (a,d) t = 1.25 ms; (b,e) t = 7.5 ms; and (c,f) t = 12.5 ms. The green line identifies the panel shape. Reproduced from [44]
For the same conditions of Fig. 16, in Fig. 17, we show PIV-based pressure reconstruction. Results confirm our intuition that pressure is maximized in the early stage of the impact close to the water jet, consistent with our previous work on aluminum wedges [34]. The pressure field is similar for the two panels at time instants t = 1.25 and 7.5 ms, while the pressure in the fluid for the VE220–60 panel at t = 12.5 ms is remarkably different from the pressure field for the VE460–60 panel, due to the failure of the panel. Consistent with the velocity recirculation noted in Fig. 16, we see that the pressure reaches negative values in the vicinity of the failed panel, while it is positive close to the keel.

Pressure distribution in the fluid in kPa for (a–c) VE220–60 and (d–f) VE460–60, at different time instants: (a,d) t = 1.25 ms; (b,e) t = 7.5 ms; and (c,f) t = 12.5 ms. Reproduced from [44]
Scanning electron micrographs of the failed panels do not show the presence of debris on the surface, indicating that failure is initiated on the tensile side of the cross-section during bending. However, different from a quasi-static three- or four-point bending test, the tensile side of the cross-section alternates during water entry between the top and bottom edge. Consistent with this claim, we also noted microballoons debonding from the matrix on both the top and bottom edges. As a result of debonding, most of the tensile stress is resisted by the matrix, whose tensile cracks contribute to the failure of the panel.
7 Conclusions
From direct measurement of the velocity field through PIV, it is possible to reconstruct the pressure field in the fluid domain by integrating Navier-Stokes or Poisson equations . In this chapter, we summarized research supported by ONR, Solid Mechanics Program, at NYU on the integration of PIV in the study of the slamming response of rigid and compliant bodies. We summarize 7 years of research on the topic, addressing the very foundations of the approach and Navy-relevant applications.
PIV-based pressure inference holds promise to advance our understanding of hull slamming by affording spatially-distributed, time-resolved measurement of the hydrodynamic loading experienced by structures that enter or exit the water surface. Several groups throughout the world working on the area of water impact have recognized the potential value of a PIV-based approach to the inference of the pressure field [68]. Some of the recent efforts in this area have directly benefited from experimental results from our line of work, which has enabled thorough experimental validation of existing theories and computer codes, while offering insight into the complex, unsteady fluid-structure interactions underpinning water entry and exit problems.
For example, in our own theoretical work [43] on mathematical modeling of hydroelastic phenomena, we utilized our experimental data to benchmark predictions of the effect of elastic compliance on the hydrodynamic loading experienced during water entry. Similarly, in [69], Izadi and colleagues used our experimental results to validate a computational model, based on the STAR CCM+ software and adopting an overset mesh.
While we have made several progresses in PIV-based pressure inference, future research is required to fill several knowledge gaps. First, further research should seek to establish tight error bounds for the estimation of the hydrodynamic loading to facilitate uncertainty analysis and parameter optimization. Some work along this directions has been recently reported in [70]. Second, future research should explore tomographic PIV for the reconstruction of a three-dimensional pressure field, without the need of multiple planar PIV experiments that might increase experimental uncertainty. Third, more research is needed to expand the characterization of the slamming response of composite materials, beyond the single instance of syntactic foams considered herein to clarify the failure response of other lightweight composites. Fourth, a potential line of inquiry entails the analysis of repeated slamming, consisting of multiple entries and exits, which characterize the typical operation of marine vessels and may bear important consequences in the context of fatigue.
Our current work is pursuing two research directions. First, we are pursuing the integration of digital image correlation (DIC) and PIV to afford the possibility of simultaneous measurement of structural deformations and flow physics in Navy-relevant problems. We have recently demonstrated the possibility of a combined PIV-DIC approach in the study of static deformations induced by a steady fluid flow [71] and we are presently seeking to extend the method to dynamic problems. Second, we are working on the fluid-structure interaction associated with the impact on a water-backed plate. We have developed a mathematical model to capture the structural response of water-backed plates in two-dimensions, which we have verified through comparison with detailed computer simulations [72]. Presently, we are working to gather experimental results that could support validation of the framework and help elucidate the physics of the impact.
References
Faltinsen OM (1990) Sea loads on ships and offshore structures. Cambridge University Press, New York
Faltinsen OM, Landrini M, Greco M (2004) Slamming in marine applications. J Eng Math 48(3–4):187–217
Hughes K et al (2013) From aerospace to offshore: bridging the numerical simulation gaps-simulation advancements for fluid structure interaction problems. Int. J. Impact Eng 61:48–63
Kapsenberg G (2011) Slamming of ships: where are we now? Philos Trans R Soc A Math Phys Eng Sci 369(1947):2892–2919
Von Karman T (1929) The impact on seaplane floats, during landing. NACA-TN-321
Wagner H (1932) Uber stoss-und gleitvorgange an der ober- flache von flussigkeite. ZAMM – Zeitschrift fur Ange- wandte Mathematik und Mechanik 12(4):193–215
Abrate S (2011)) Hull slamming. Appl Mech Rev 64(6):060803
Panciroli R, Abrate S, Minak G, Zucchelli A (2012) Hydroelasticity in water-entry problems: comparison between experimental and SPH results. Compos Struct 94(2):532–539
Panciroli R, Abrate S, Minak G (2013) Dynamic response of flexible wedges entering the water. Compos Struct 99:163–171
Das K, Batra RC (2011) Local water slamming impact on sandwich composite hulls. J Fluid Struct 27(4):523–551
Qin Z, Batra RC (2009) Local slamming impact of sandwich composite hulls. Int J Solids Struct 46(10):2011–2035
Ray MC, Batra RC (2013) Transient hydroelastic analysis of sandwich beams subjected to slamming in water. Thin-Walled Struct 72:206–216
Xiao J, Batra RC (2012) Local water slamming of curved rigid hulls. Int J Multiphys 6(3):305–340
Xiao J, Batra RC (2014) Delamination in sandwich panels due to local water slamming loads. J Fluid Struct 48:122–155
Allen T, Battley M (2015) Quantification of hydroelasticity in water impacts of flexible composite hull panels. Ocean Eng 100:117–125
Battley MA, Clark AM, Allen TD, Cameron CJ (2014) Shear strength of sandwich core materials subjected to loading rates relevant to water slamming. J Reinf Plast Compos 33(6):506–513
Swidan A et al (2016) Experimental drop test investigation into wetdeck slamming loads on a generic catamaran hullform. Ocean Eng 117:143–153
Battley M, Allen T (2016) Characterisation of fluid-structure interaction for water impact of composite panels. Int J Multiphys 6:3
Battley M, Allen T (2012) Servo-hydraulic system for controlled velocity water impact of marine sandwich panels. Exp Mech 52(1):95–106
Razola M, Rosén A, Garme K (2014) Experimental evaluation of slamming pressure models used in structural design of high-speed craft. Int Shipbuild Prog 61(1–2):17–39
Stenius I, Rosén A, Battley M, Allen T (2013) Experimental hydroelastic characterization of slamming loaded marine panels. Ocean Eng 74:1–15
Stenius I, Rosén A, Battley M, Allen T, & Pehrson P (2011) Hydroelastic effects in slamming loaded panels. 11th. International conference on Fast Sea transportation (FAST 2011), Honolulu, Hawaii pp 644–652
Stenius I, Rosén A, Kuttenkeuler J (2011) Hydroelastic interaction in panel-water impacts of high-speed craft. Ocean Eng 38(2–3):371–381
Lewis SG, Hudson DA, Turnock SR, Taunton DJ (2010) Impact of a free-falling wedge with water: synchronized visualization pressure and acceleration measurements. Exp Fluids 42(3):035509
Luo H, Wang H, Soares CG (2012) Numerical and experimental study of hydrodynamic impact and elastic response of one free-drop wedge with stiffened panels. Ocean Eng 40:1–14
De Backer G et al (2009) Experimental investigation of water impact on axisymmetric bodies. Appl Ocean Res 31(3):143–156
Charca S, Shafiq B, Just F (2009) Repeated slamming of sandwich composite panels on water. J Sandw Struct Mater 11(5):409–424
Aureli M, Porfiri M (2010) Low frequency and large amplitude oscillations of cantilevers in viscous fluids. Appl Phys Lett 96(16):164102
Jalalisendi M, Panciroli R, Cha Y, Porfiri M (2014) A particle image velocimetry study of the flow physics generated by a thin lamina oscillating in a viscous fluid. J Appl Phys 115(5):054901
Raffel M, Willert C, Wereley S, Kompenhans J (2007) Particle image velocimetry: a practical guide. Springer, New York
Van Oudheusden BW (2013) PIV-based pressure measurement. Meas Sci Technol 24(3):032001
Cha Y, Phan CN, Porfiri M (2012) Energy exchange during slamming impact of an ionic polymer metal composite. Appl Phys Lett 101(9):094103
Panciroli R, Porfiri M (2013) Evaluation of the pressure field on a rigid body entering a quiescent fluid through particle image velocimetry. Exp Fluids 54(12):1630
Panciroli R, Porfiri M (2015) Analysis of hydroelastic slamming through particle image velocimetry. J Sound Vib 347:63–78
Facci AL, Panciroli R, Ubertini S, Porfiri M (2015) Assessment of PIV-based analysis of water entry problems through synthetic numerical datasets. J Fluid Struct 55:484–500
Panciroli R, Shams A, Porfiri M (2015) Experiments on the water entry of curved wedges: high speed imaging and particle image velocimetry. Ocean Eng 94:213–222
Jalalisendi M, Shams A, Panciroli R, Porfiri M (2015) Experimental reconstruction of three-dimensional hydrodynamic loading in water entry problems through particle image velocimetry. Exp Fluids 56(2):1–17
Jalalisendi M, Osma SJ, Porfiri M (2015) Three-dimensional water entry of a solid body: a particle image velocimetry study. J Fluid Struct 59:85–102
Shams A, Jalalisendi M, Porfiri M (2015) Experiments on the water entry of asymmetric wedges using particle image velocimetry. Phys Fluids 27(2):027103
Facci AL, Porfiri M, Ubertini S (2016) Three-dimensional water entry of a solid body: a computational study. J Fluid Stuct 66:36–53
Jalalisendi M, Zhao S, Porfiri M (2017) Shallow water entry: modeling and experiments. J Eng Math 104(1):131–156
Shams A, Zhao S, Porfiri M (2017) Hydroelastic slamming of flexible wedges: modeling and experiments from water entry to exit. Phys Fluids 29(3):037107
Shams A, Porfiri M (2015) Treatment of hydroelastic impact of flexible wedges. J Fluid Struct 57:229–246
Shams A, Zhao S, Porfiri M (2017) Water impact of syntactic foams. Materials 10(3)
Jalalisendi M, Porfiri M (2018) Water entry of compliant slender bodies: theory and experiments. Int J Mech Sci 149:514–529
Jalalisendi M, Porfiri M (2018) Water entry of cylindrical shells: theory and experiments. AIAA J 56(11):4500–4514
Russo S, Jalalisendi M, Falcucci G, Porfiri M (2018) Experimental characterization of oblique and asymmetric water entry. Exp Thermal Fluid Sci 92:141–161
Jalalisendi M, Benbelkacem G, Porfiri M (2018) Solid obstacles can reduce hydrodynamic loading during water entry. Phys Rev Fluids 3(7):074801
Baur T & Köngeter J (1999) PIV with high temporal resolution for the determination of local pressure reductions from coherent turbulence phenomena. 3rd International Workshop on PIV’99, Santa Barbara, pp 101–106
Fujisawa N, Nakamura Y, Matsuura F, Sato Y (2006) Pressure field evaluation in microchannel junction flows through PIV measurement. Microfluid Nanofluid 2(5):447–453
Fujisawa N, Tanahashi S, Srinivas K (2005) Evaluation of pressure field and fluid forces on a circular cylinder with and without rotational oscillation using velocity data from PIV measurement. Meas Sci Technol 16(4):989–996
Liu X, Katz J (2006) Instantaneous pressure and material acceleration measurements using a four-exposure PIV system. Exp Fluids 41(2):227–240
Murai Y, Nakada T, Suzuki T, Yamamoto F (2007) Particle tracking velocimetry applied to estimate the pressure field around a savonius turbine. Meas Sci Technol 18(8):2491–2503
Jensen A, Sveen JK, Grue J, Richon J-B, Gray C (2001) Accelerations in water waves by extended particle image velocimetry. Exp Fluids 30(5):500–510
Nila A, Vanlanduit S, Vepa S, Van Paepegem W (2013) A PIV-based method for estimating slamming loads during water entry of rigid bodies. Meas Sci Technol 24(4):045303
Korobkin A (2004) Analytical models of water impact. Eur J Appl Math 15(06):821–838
Korobkin AA (1996) In: Ohkusu M (ed) Advances in marine hydrodynamics. Computational Mechanics, Boston, pp 323–371
Thielicke W & Stamhuis EJ (2014) PIVlab – time-resolved digital particle image velocimetry tool for MATLAB (version: 1.32)
Thielicke W, Stamhuis EJ (2014) PIVlab - towards user-friendly, affordable and accurate digital particle image velocimetry in MATLAB. J Open Res Softw 2(1):e30
Panton RL (1994) Incompressible flow. Wiley, New York
Garcia D (2010) Robust smoothing of gridded data in one and higher dimensions with missing values. Comput Stat Data Anal 54(4):1167–1178
Baur T (1999) PIV with high temporal resolution for the determination of local pressure reductions from coherent turbulence phenomena. 3rd International Workshop on PIV'99, Santa Barbara pp 101–106
Porfiri M, Shams A (2017) Pressure reconstruction during water impact through particle image velocimetry: methodology overview and applications to lightweight structures. In: Lopresto V, Langella A, Abrate S (eds) Dynamic response and failure of composite materials and structures. Woodhead Publishing, Duxford, pp 395–416
Russo S, Jalalisendi M, Falcucci G, & Porfiri M (2018) A critical assessment of PIV-based pressure reconstruction in water-entry problems. AIP Conference Proceedings, (AIP Publishing), p 420012
Narkis M, Kenig S, Puterman M (1984) Three-phase syntactic foams. Polym Compos 5(2):159–165
Gupta N, Zeltmann SE, Shunmugasamy VC, Pinisetty D (2014) Applications of polymer matrix syntactic foams. JOM 66(2):245–254
Shunmugasamy VC, Anantharaman H, Pinisetty D, Gupta N (2015) Unnotched Izod impact characterization of glass hollow particle/vinyl ester syntactic foams. J Compos Mater 49(2):185–197
Wang S, Soares CG (2017) Review of ship slamming loads and responses. J Mar Sci Appl 16(4):427–445
Izadi M, Ghadimi P, Fadavi M, Tavakoli S (2018) Numerical modeling of the freefall of two-dimensional wedge bodies into water surface. J Braz Soc Mech Sci Eng 40(1):24
Pan Z, Whitehead JP, Richards G, Truscott TT, & Smith BL (2018) Error propagation dynamics of PIV-based pressure field calculation (3): what is the minimum resolvable pressure in a reconstructed field? arXiv preprint arXiv:1807.03958
Zhang P, Peterson SD, Porfiri M (2019) Combined particle image velocimetry/digital image correlation for load estimation. Exp Thermal Fluid Sci 100:207–221
Shams A, Lopresto V, Porfiri M (2017) Modeling fluid-structure interactions during impact loading of water-backed panels. Compos Struct 171:576–590
Acknowledgments
The work has been supported by the Office of Naval Research (Grant N00014-10-1-0988 and N00014-18-1-2218) with Dr. Y.D.S. Rajapakse as the program manager. The author would like to thank Dr. Andrea Facci, Dr. Giacomo Falcucci, Dr. Mohammad Jalalisendi, Dr. Simonluca Russo, Dr. Adel Shams, Dr. Stefano Ubertini, Dr. Peng Zhang, and Mr. Sam Zhao, who have contributed to the research summarized in this chapter.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Porfiri, M. (2020). Inferring Impulsive Hydrodynamic Loading During Hull Slamming From Water Velocity Measurements. In: Lee, S. (eds) Advances in Thick Section Composite and Sandwich Structures. Springer, Cham. https://doi.org/10.1007/978-3-030-31065-3_9
Download citation
DOI: https://doi.org/10.1007/978-3-030-31065-3_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-31064-6
Online ISBN: 978-3-030-31065-3
eBook Packages: Chemistry and Materials ScienceChemistry and Material Science (R0)