
Abstract
This paper addresses the analysis the optimal power flow (OPF) problem in alternating current (AC) radial distribution networks by using a new metaheuristic optimization technique known as a sine-cosine algorithm (SCA). This combinatorial optimization approach allows for solving the nonlinear non-convex optimization OPF problem by using a master-slave strategy. In the master stage, the soft computing SCA is used to define the power dispatch at each distributed generator (dimensioning problem). In the slave stage, it is used a conventional radial power flow formulated by incidence matrices is used for evaluating the total power losses (objective function evaluation). Two conventional highly used distribution feeders with 33 and 69 nodes are employed for validating the proposed master-slave approach. Simulation results are compared with different literature methods such as genetic algorithm, particle swarm optimization, and krill herd algorithm. All the simulations are performed in MATLAB programming environment, and their results show the effectiveness of the proposed approach in contrast to previously reported methods.
This work was supported in part by the Administrative Department of Science, Technology, and Innovation of Colombia (COLCIENCIAS) through the National Scholarship Program under Grant 727-2015, in part by the Universidad Tecnológica de Bolívar under Project C2018P020 and in part by the Instituto Tecnológico Metropolitano under the project P17211.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Optimal sizing of distributed generation
- Optimal power flow
- Soft computing optimization technique
- Sine-cosine algorithm
- Radial distribution networks
1 Introduction
The design of electrical networks generates nonlinear large-scale optimization problems which imply the needed of powerful optimization techniques to address these problems [1,2,3,4,5]. Typically, when the focus is to analyze electrical distribution networks for planning and operation always emerges a classical problem denominated: optimal power flow (OPF) problem [6, 7]. This corresponds to a minimization problem that allows determining the set of voltage profiles and power generations in electrical networks with the presence of multiple generation sources by guaranteeing classical constraints of power system analysis such as energy balance, voltage regulation, and lines chargeability, and so on [8, 9]. The OPF for alternating current (AC) electrical networks is nonlinear non-convex and required a combination of numerical methods such as Gauss-Seidel [10], Newton–Raphson [11] or sweep methods (only applicable for radial grids [12, 13]) with combinatorial techniques in the continuous domain, i.e., particle-swarm optimization (PSO) or optimization techniques derived from it [9, 14, 15].
Here, we are interested in analyzing the OPF problem for AC distribution networks to address the problem of optimal dimensioning of distributed generation that can be obtained from fossil or renewable energy resources for reducing the total power loss of the network. This problem has been conventionally studied in the specialized literature embedded inside of the problem of optimal location of the distributed generation in distribution networks [9, 14, 16]. To do so, the OPF problem has been solved by using convex optimization approaches with semidefinite and second-order cone programming [17,18,19], interior point methods [20], particle swarm optimization [9, 21], genetic algorithms [22], tabu search methods [23], krill herd, Firefly and bee colony algorithms [14, 24, 25], among others. Unlike this extensive list of previous works in this research line, here we propose a novel developed a sine-cosine optimization algorithm for solving the OPF problem in AC distribution networks focused on optimal dimensioning distributed generations. It is important to mention that this problem was previously used for solving OPF problems in power systems with mesh topologies [15]. However, that approach does not separate the problem of generation of the problem of power flow, which could be non-efficient for radial distribution networks. For this reason, a variant of that approach for radial distribution networks is proposed by using a master-slave strategy for addressing the problem of optimal dimensioning of distributed generation in radial distribution networks. In the master stage, a sine-cosine algorithm (SCA) defines the power output at each distributed generator, while in the slave stage we employ a successive approximation method based on an admittance’s formulation for solving the resulting power flow set of equations [26, 27]. Note that our approach has adequate performance when classical radial test feeders with 33 and 69 nodes are used, showing better performance in comparison to previously reported methods as will discussed in the results section.
The remainder of this paper is organized as follows: Sect. 2 is presented the mathematical formulation of the optimal dimensioning of distributed generators in radial distribution networks by using a classical optimal power problem formulation. Section 3 shows the proposed master-salve methodology based on a combination of the SCA with the proposed successive approximation method for power flow analysis in the slave stage. Section 4 shows the configuration of the test systems as well as the simulation scenarios considered. Section 5 presents the main conclusions and possible future works derived from this research.
2 Mathematical Modeling
Optimal location and dimensioning of distributed generations (DGs) in radial distribution networks correspond to a mixed-integer nonlinear optimization problem, which is non-differentiable and non-convex with many local minimums and non-deterministic polynomial-time, i.e., complex to be solved. The mathematical model that represents these problems is presented below
Objective function:
where \(p_{loss}\) is the total power losses in all the branches of the network, \(\mathbf V \in \mathbb {C}^{n\times 1}\) is vector that contains all the complex voltage variables and \(\mathbf Y _L\in \mathbb {C}^{n\times n}\) is the admittance matrix that contain that all the admittance effects between branches (it does not include shunt resistive connections). Note that n is the total number of nodes of the grid.
Set of constraints:
where \(\mathbf S _{CG}\in \mathbb {C}^{n\times 1}\) is the vector that contain all power generations in all conventional generators, i.e., slack nodes (for radial distribution system there is only one slack node); \(\mathbf S _{DG}\in \mathbb {C}^{n\times 1}\) corresponds to the vector that contains all power generation in all the distributed generation nodes; \(\mathbf S _{D}\in \mathbb {C}^{n\times 1}\) represents the vector of constant power consumptions. \(\mathbf D \left( \mathbf V \right) \in \mathbb {C}^{n\times n}\) is a diagonal positive definite matrix of variables that contains all the voltages of the grid. \(\mathbf Y _N\in \mathbb {C}^{n\times n}\) is the matrix of admittances related to shunt linear resistive loads connected to the nodes of the grid, this matrix is positive semidefinite or null in some cases. \(V^{\min }\in \mathbb {C}^{n\times 1}\) and \(V^{\max }\in \mathbb {R}^{n\times 1}\) are the minimum and maximum voltage bounds allowed for all nodes of the network. \(S^{\min }_{GC}\in \mathbb {C}^{n\times 1}\) and \(S^{\max }_{GC}\in \mathbb {C}^{n\times 1}\) are the minimum and maximum power generation bounds in the slack nodes; \(S^{\min }_{DG}\in \mathbb {C}^{n\times 1}\) and \(S^{\max }_{DG}\in \mathbb {C}^{n\times 1}\) are the minimum and maximum power generation capabilities in the distributed generators. The interpretation of the mathematical model given from (1) to (6) is as follows:
The objective function associated with the active power losses minimization is given in (1) which depends exclusively of the all voltage profiles of the network. In (2) is defined the power balance equation for all nodes of the networks, which is the only one nonlinear non-convex set equations in the optimal power flow model. Expression (3) defines the voltage regulation bounds of the grid; while (4) and (5) define the minimum and maximum power bounds for conventional and distributed generation. Finally, (6) shows that each distributed generator is operated with unity power factor.
Note that the mathematical model that describes the optimal power flow problem for optimal dimensioning of distributed generation in radial AC distribution network is nonlinear non-convex, which implies that numerical methods, as well as soft computing approaches, must be required to solve this problem. Here, we present a metaheuristic alternative based on sine and cosine functions to solve this problem by splitting it into two problems named the master problem and slave problem. Note that the master problem corresponds to the dimensioning of the distributed generators, while the slave problem is the classical power flow problem. These optimization problems will be formally presented and discussed in the following section.
3 Proposed Solution Methodology
To solve the OPF model defined from (1) to (6) a metaheuristic methodology is required. This combinatorial optimization approach is entrusted with defining the power output for each distributed generator in the master stage; notwithstanding once defined all power generations, a power flow method is required to determine all the voltage profiles, which allows the objective function evaluation. Each one of this stage is presented below.
3.1 Master Stage: Sine-Cosine Optimization Algorithm
The SCA is a powerful metaheuristic optimization technique for addressing continuous optimization problems [15], which is a variant of the conventional particle-swarm optimization approaches [9]. Here we will present the main aspects of this technique as follows.
Fitness Function. The main advantage of using combinatorial optimization approaches is the possibility of working in the infeasible solution space to explore some promissory regions of this space. In addition, this relaxation is possible [15], since all the constraints are included as penalties in the objective function, which transforms it into a fitness function [14]. In this paper for solving the OPF problem we employs the following fitness function:
where \(\alpha _1\in \mathbb {R}^{n\times 1}\) and \(\alpha _2\in \mathbb {R}^{n\times 1}\) are vectors with penalty factors that allow controlling the impact of exploring the infeasible solution space. All the components of these vectors are positive numbers. There we select for each component a value of 100. Note that the fitness function can be equal to the objective function (1) if the solution space is totally feasible, i.e., all the constraints (2)–(6) must be satisfied.
It is important to mention that the capacity constraints of the conventional generators (see (4)) are not included in the fitness function, since for radial distribution systems the slack node is unique and it is assumed that this node is ideal, i.e., this node has the unbounded capability. In addition, the unity power factor requirement given by (6) is fulfilled intrinsically in the optimization process made by the SCA, for this reason, we do not consider this restriction in the fitness function (7).
Initial Population. The SCA is a population optimization technique that makes evolution this population through random controlled procedure [15]. To initialize this optimization algorithm the starting population is defined below.
where a represents the number of individuals considered and b is the number of distributed generators available for dispatching into the grid. Note that \(P^{t}\) is the population conformation at the iteration t.
To guarantee that the generation capability at each distributed generator satisfy the requirement defined in (4), we proposed a feasible population by calculating each component of \(P^{t}\) as follows.
where ij represents the row i and column j in the matrix of the initial population and \(r_1\) is a random number, i.e., \(r_1 \in \left[ 0,1\right] \).
Evolution Criterion. The sine-cosine optimization algorithm evolves by considering a simple sine-cosine rule. For doing so, let us suppose the fitness function for all individuals contained in \(P^t\) were evaluated, then, the best individual of that population is named \({x}^t\), with this individual, two possible descendants can be formulated as follows:
where \(r_3\) and \(r_4\) are random numbers between 0 to 1 and \(r_2\) is entrusted of the convergence of the algorithm, and is calculated as presented below.
where \(t_{\max }\) is the maximum number of iterations projected for the optimization process.
Note that \(y_i^{t+1}\) and \(z_i^{t+1}\) are the potential individuals for replacing \(x_{i}^t\). This substitution can be made as follows: Select \(y_i^{t+1}\) as a potential solution, if \(z_f\left( y_i^{t+1}\right) < z_f\left( z_i^{t+1}\right) \); otherwise select \(z_i^{t+1}\) as a potential solution; then, replace \(x_{i}^t\) by \(y_i^{t+1}\) (\(z_i^{t+1}\)) if its fitness function is better than \(z_f\left( x_i^{t}\right) \); otherwise \(x_i^{t+1} = x_i^t\).
It is important to point out that if one component of \(x_i^{t+1}\) violates the lower or upper bound allowed for the distributed generation, then, its value is adjusted using (9) for preserving the feasibility of the current population as defined in (5).
Stopping Criterion. The searching process of the SCA stops if one of the following criteria are attained.
-
If the maximum number of iteration is reached, then, the search process of the SCA ends.
-
If during \(k_{\max }\) consecutive iterations the fitness does not shows any improvement, then, the search process of the SCA ends.
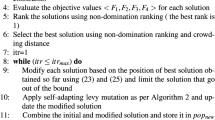
Pseudocode of the SCA. Algorithm 1 presents the pseudocode of the proposed SCA for optimal dimensioning of distributed generators.

Note that in this flowchart the slave stage is essential in the evolution of the SCA since this stage allows determining the fitness function for the population and descending individuals. In next subsection will be presented this slave stage.
3.2 Slave Stage: Power Flow Method
The solution of the power flow equations given in (2) is essential in the evolution process of the sine-cosine optimization algorithm as presented in Algorithm 1. In order to solve this set of equations, let us rewrite (2) as fol lows:
where \(\mathbf V _d\) and \(\mathbf V _g\) represent the voltage profiles in the demand and slack nodesFootnote 1. Note that \(\mathbf Y _{gg}\), \(\mathbf Y _{gd}\), \(\mathbf Y _{dg}\) and \(\mathbf Y _{dd}\) correspond to the components of the matrix \(\mathbf Y _{L} + \mathbf Y _{N}\) that relates slack nodes and demands, respectively.
It is important to point out that (13a) is the power balance in the slack node, which is linear since \(\mathbf V _{g}\) is perfectly known and well defined. Nevertheless, the set of equations (13b) remains being nonlinear non-convex, since \(\mathbf V _{d}\) are the unknown variables. Note that \(\mathbf S _{DG}\) are variables in the OPF problem; however, for power flow analysis, those values are considered constant, since they have been defined in the master stage.
The solution of the power flow problem it is only required to solve (13b); for doing so, let us rearrange this set of equations as follows
To solve (14) a recursive procedure can be added on this set of equations as presented below.
where m is the iterative counter of the power flow problem. Note that the distributed generation values depend on the t iteration of the master stage.
Note that the convergence of (15) is guaranteed, since \(\mathbf Y _{dd}\) is diagonal dominant [26]. We can say that the power flow problem (15) is reached if and only if \(\max {\left| \mathbf V _d^{m+1} - \mathbf V _d^{m}\right| } \le \epsilon \). For power flow analysis typically the tolerance convergence \(\epsilon \) is assigned as \(1\times 10^{-10}\) [26], while the maximum number of iterations is defined as \(m_{\max } = 25\).
4 Test Systems
In this paper, we employ two radial test feeders with 33 and 69 nodes, respectively. These test systems are classically used for optimal location and dimensioning distributed generation in electrical distribution networks. The information about those test systems is detailed below.
4.1 33-Node Test Feeder
This test system is composed of 33 nodes and 32 lines with the slack source located at node 1. The operative voltage of this test system is 12.66 kV. The total active and reactive power demands for this test system are 3715 kW and 2300 kVAr, which produces 210.98 kW of active power losses. All branch data of this test feeder as well as its topological information can be consulted in [9].
4.2 69-Node Test Feeder
The base voltage for this test system is 12.66 kV, and the total demand is \(3800 + j2690\) kVA [14]. In addition, the electrical parameters (electrical configuration) of this test system (resistances and inductances in all the branches as well as load consumptions) can be consulted in [9].
4.3 Simulation Scenarios
To validate the proposed approach for optimal dimensioning of distributed generation in a radial distribution test system, we employ the information provided by [14], where, five methodologies for solving the problem were studied. Notwithstanding, we are only interested in validating the optimal power flow for each technique reported in [14], which implies that we assume that the location of the generators corresponds to an input data in our approach.
5 Computational Validation
All simulations were carried-out in a desk-computer INTEL(R) Core(TM) \(i7-7700\), 3.60 GHz, 8 GB RAM with 64 bits Windows 10 Pro by using MATLAB 2017b.
5.1 33-Node Test Feeder
Table 1 reports the solutions presented in [14] for all comparison methods as well as the solution reached by the proposed master-slave optimization strategy. Note that, in this test system the proposed SCA in the master stage as well as the proposed slave power flow method allows improving all the results reported in [14]. For example, see KHA method in Table 1 where is shown that the total power losses achieved by this method are 75.4120 kW, while our approach the total power losses are reduced to 73.5210 kW. This improvement (1.8910 kW), implies that the dimensioning of each generator must be changed as reported in columns 3 and 5 of Table 1.
5.2 69-Node Test Feeder
Table 2 reports the solutions presented in [14] for all comparison methods as well as the solution reached by the proposed master-slave optimization strategy.
5.3 Additional Comments
Figure 1 reports the general improvement of our proposed SCA in comparison to the results presented in [14] for the 33- and 69-node test feeders. In Fig. 1(a) are presented the results obtained in the 33-node test feeder, it is possible to observe that our approach shows similar performance in comparison with the LSFSA method since our improvement is only 0.20 % better. Notwithstanding, the worst method reported in [14] is the PSO approach, since our proposed method produces 21.22 % of improvements when both are compared. In the case of the 69-node test feeder, the results are provided in Fig. 1(b), where it can be observed that the master-slave methodology proposed obtains an average reduction in the power losses of 12.19% in comparison with the comparison techniques. Just 0.11% lower than the best solution (KHA), and presenting a reduction of 0.576%, 17.76%, 13.63%, and 10.94%, when is compared with the LSFSA, GA, PSO, and the GA/PSO, respectively.

Percentage of power loss improvement when the proposed approach is compared to previous reported results: (a) 33-node test feeder, and (b) 69-node test feeder
In addition, we can affirm that:
-
\(\checkmark \) The Sine-Cosine metaheuristic shows the better averaged results in contrast to the other methodologies since in the 90 % of the simulation cases analyzed it shows better performance in comparison to the results previously reported in specialized literature. The only one case (10 %), our approach shows a minimal deterioration in comparison to the KHA method for the 69-node test feeder.
-
\(\checkmark \) The results reported by GA, PSO, and the hybrid GA/PSO evidence that their methodologies were not thought to dimensioning generators, since those results are far away from KHA, LSFSA, and the proposed approach. This situation may be attributable to the parametrization of those algorithms for OPF analysis, which can be susceptible to improvements in order to increase the efficiency of those algorithms.
6 Conclusions and Future Works
In this paper was studied the problem of optimal dimensioning of distributed generation in radial distribution networks via a metaheuristic optimization technique. This methodology was designed through a master-slave optimization strategy. The master stage was a combinatorial optimization technique based on the SCA. In the slave stage, it was used as a power flow numerical method based on successive approximations. The master stage was entrusted with determining the optimal dimension of the distributed generators, while the slave stage was entrusted with evaluating the impact of these generators in terms of power losses.
Simulation results over two radial distribution test feeders with 33 and 69 nodes allowed observing that the SCA is an excellent methodology for solving OPF problems in radial distribution networks by showing better results in comparison with classical optimization algorithms.
As future work, it will be possible to embedded the SCA into a discrete metaheuristic optimization technique for locating and sizing distributed generators. These metaheuristic could be genetic algorithms, tabu search or population based incremental leaning, among others.
Notes
- 1.
\(^{\star }\) represent the conjugate operator in complex numbers.
References
Keane, A., et al.: State-of-the-art techniques and challenges ahead for distributed generation planning and optimization. IEEE Trans. Power Syst. 28(2), 1493–1502 (2013)
Montoya, O.D., Garces, A., Castro, C.A.: Optimal conductor size selection in radial distribution networks using a mixed-integer non-linear programming formulation. IEEE Lat. Am. Trans. 16(8), 2213–2220 (2018)
Zeng, B., Zhang, J., Yang, X., Wang, J., Dong, J., Zhang, Y.: Integrated planning for transition to low-carbon distribution system with renewable energy generation and demand response. IEEE Trans. Power Syst. 29(3), 1153–1165 (2014)
Li, R., Wang, W., Xia, M.: Cooperative planning of active distribution system with renewable energy sources and energy storage systems. IEEE Access 6, 5916–5926 (2018)
Montoya, O.D., Grajales, A., Garces, A., Castro, C.A.: Distribution systems operation considering energy storage devices and distributed generation. IEEE Lat. Am. Trans. 15(5), 890–900 (2017)
Bai, X., Qu, L., Qiao, W.: Robust AC optimal power flow for power networks with wind power generation. IEEE Trans. Power Syst. 31(5), 4163–4164 (2016)
Gabash, A., Li, P.: Active-reactive optimal power flow in distribution networks with embedded generation and battery storage. IEEE Trans. Power Syst. 27(4), 2026–2035 (2012)
Wang, Y., Zhang, N., Li, H., Yang, J., Kang, C.: Linear three-phase power flow for unbalanced active distribution networks with PV nodes. CSEE J. Power Energy Syst. 3(3), 321–324 (2017)
Grisales-Noreña, L.F., Gonzalez-Montoya, D., Ramos-Paja, C.A.: Optimal sizing and location of distributed generators based on PBIL and PSO techniques. Energies 11(1018), 1–27 (2018)
Teng, J.-H.: A modified gauss–seidel algorithm of three-phase power flow analysis in distribution networks. Int. J. Electr. Power Energy Syst. 24(2), 97–102 (2002)
Zamzam, A.S., Sidiropoulos, N.D., Dall’Anese, E.: Beyond relaxation and Newton–Raphson: solving AC OPF for multi-phase systems with renewables. IEEE Trans. Smart Grid 9(5), 3966–3975 (2018)
Garces, A.: A linear three-phase load flow for power distribution systems. IEEE Trans. Power Syst. 31(1), 827–828 (2016)
Lisboa, A., Guedes, L., Vieira, D., Saldanha, R.: A fast power flow method for radial networks with linear storage and no matrix inversions. Int. J. Electr. Power Energy Syst. 63, 901–907 (2014)
Sultana, S., Roy, P.K.: Krill herd algorithm for optimal location of distributed generator in radial distribution system. Appl. Soft Comput. 40, 391–404 (2016)
Attia, A.-F., Sehiemy, R.A.E., Hasanien, H.M.: Optimal power flow solution in power systems using a novel Sine-Cosine algorithm. Int. J. Electr. Power Energy Syst. 99, 331–343 (2018)
Moradi, M., Abedini, M.: A combination of genetic algorithm and particle swarm optimization for optimal DG location and sizing in distribution systems. Int. J. Electr. Power Energy Syst. 34(1), 66–74 (2012)
Huang, S., Wu, Q., Wang, J., Zhao, H.: A sufficient condition on convex relaxation of AC optimal power flow in distribution networks. IEEE Trans. Power Syst. 32(2), 1359–1368 (2017)
Venzke, A., Halilbasic, L., Markovic, U., Hug, G., Chatzivasileiadis, S.: Convex relaxations of chance constrained AC optimal power flow. IEEE Trans. Power Syst. 33(3), 2829–2841 (2018)
Miao, Z., Fan, L., Aghamolki, H.G., Zeng, B.: Least squares estimation based SDP cuts for SOCP relaxation of AC OPF. IEEE Trans. Autom. Control 63(1), 241–248 (2018)
Oliveira, E.J., Oliveira, L.W., Pereira, J., Honório, L.M., Silva, I.C., Marcato, A.: An optimal power flow based on safety barrier interior point method. Int. J. Electr. Power Energy Syst. 64, 977–985 (2015)
Yang, J., He, L., Fu, S.: An improved PSO-based charging strategy of electric vehicles in electrical distribution grid. Appl. Energy 128, 82–92 (2014)
Todorovski, M., Rajicic, D.: An initialization procedure in solving optimal power flow by genetic algorithm. IEEE Trans. Power Syst. 21(2), 480–487 (2006)
Abido, M.A.: Optimal power flow using tabu search algorithm. Electr. Power Compon. Syst. 30(5), 469–483 (2002)
Kılıc, U., Ayan, K.: Optimizing power flow of AC–DC power systems using artificial bee colony algorithm. Int. J. Electr. Power Energy Syst. 53, 592–602 (2013)
Balachennaiah, P., Suryakalavathi, M., Nagendra, P.: Firefly algorithm based solution to minimize the real power loss in a power system. Ain Shams Eng. J. 9(1), 89–100 (2018)
Montoya, O.D., Garrido, V.M., Gil-González, W., Grisales-Noreña, L.F.: Power flow analysis in DC grids: two alternative numerical methods. IEEE Trans. Circuits Syst. II, 1 (2019)
Garces, A.: Uniqueness of the power flow solutions in low voltage direct current grids. Electr. Power Syst. Res. 151, 149–153 (2017)
Injeti, S.K., Kumar, N.P.: A novel approach to identify optimal access point and capacity of multiple DGs in a small, medium and large scale radial distribution systems. Int. J. Electr. Power Energy Syst. 45(1), 142–151 (2013)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Manrique, M.L., Montoya, O.D., Garrido, V.M., Grisales-Noreña, L.F., Gil-González, W. (2019). Sine-Cosine Algorithm for OPF Analysis in Distribution Systems to Size Distributed Generators. In: Figueroa-García, J., Duarte-González, M., Jaramillo-Isaza, S., Orjuela-Cañon, A., Díaz-Gutierrez, Y. (eds) Applied Computer Sciences in Engineering. WEA 2019. Communications in Computer and Information Science, vol 1052. Springer, Cham. https://doi.org/10.1007/978-3-030-31019-6_3
Download citation
DOI: https://doi.org/10.1007/978-3-030-31019-6_3
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-31018-9
Online ISBN: 978-3-030-31019-6
eBook Packages: Computer ScienceComputer Science (R0)