
Abstract
In this paper, we present a novel, speculative design approach for a bio-hybrid architectural system. The Living Weaves system seeks to harness the material accumulation capacity of climbing plants and steer this growth into an interlaced configuration with a diagrid scaffold to produce a structural Kagome weave. The concept is described through a speculative design proposal, and its feasibility is investigated in two ways; the development of an autonomous steering system to achieve interlacing of living plants with a diagrid scaffold, and an analytical design method for determining structurally advantageous plant growth routes in target geometries. Together, these two investigations represent steps towards a persistent modelling approach, which, we argue, is essential for exploiting the novel characteristics of living bio-hybrid architectures.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- Bio-hybrid architecture
- Living architecture
- Persistent Modelling
- Kagome weave
- Design informed autonomous steering
- Living Weaves
1 Introduction
Living Weaves is a speculative concept for a bio-hybrid architectural system. We define bio-hybrid architectures as spatial structures that symbiotically couple artificial/technical components with living complexes to achieve architectural objectives. For the concept presented here, we investigate the use of climbing plants as steerable integrated filaments to produce a structural weave based on the sparse Kagome pattern. We hypothesise that plants can be combined symbiotically with a pre-arranged diagrid scaffold by steering their growth into the necessary interlaced conditions to achieve the weave (Fig. 1). The symbiotic relationships between the organic and artificial components of this concept are to be understood as changing over time; the scaffold provides support in early stages of plant growth, and as the plant matures it contributes structural capacity to produce a functional hybrid weave.

Early bio-hybrid study with Arabidopsis thaliana supported by braid (top left), concept study of plant growth as structure (top right), concept study of a Kagome weave pattern with weaver geometries identified as suitable for substitution by plant growth behaviours and then colonised by simulated growth (bottom sequence).
The Kagome pattern has been chosen as the weave logic because of its proven capability to achieve approximations of any target geometry describable by a manifold triangular mesh [1]. This provides the basis for a rich and open formal architectural design space. In addition, this weave type is reliant on friction and local reciprocal action at the triangular material crossings – the corollary being that supplementary fixings are unnecessary (with the possible exception of boundary conditions). Furthermore, the Kagome pattern has, in the context of grid-shells, been analytically shown to out-perform conventional construction approaches [2].
1.1 Key Challenges
A key characteristic of living complexes is that they continuously adapt and change in response to their environment. In the case of plants, the focus of this study, environmental exchange occurs through complex interactions between exogenous and endogenous behaviours distinguished as tropisms, nasties and nutations [3]. One of the more conspicuous witnesses to these exchanges is steered material accumulation in the form of growth. This underlying condition of persistent transform presents a series of conceptual and practical challenges to orthodox approaches of design and construction, especially if one is seeking to design with and incorporate these characteristics as novel and value-adding attributes of the architectural system to which they contribute – as in the case of bio-hybrids. Here, we highlight some key challenges that the design of bio-hybrids presents for issues of construction, representation and their interrelation:
-
1.
Bio-hybrids exist in states of continual growth and adaptation; this challenges the orthodox architectural aim of producing fully pre-determined design targets that are then realised through a discrete and finite phase of construction using a defined inventory of parts. Construction needs to be conceptualised as being a continuous activity that is constantly monitored and steered in relation to available resources.
-
2.
Bio-hybrids require methods for continuously projecting growth futures – anticipated states – that are grounded in an understanding of current state and available resources; this challenge points towards the need to expand orthodox modelling practices, models and interfaces to allow continual feedback throughout the lifecycle of the architectural system, not only for assessment but as a control for feed-forward (projective) modelling that exploits the living, adaptive characteristics of the system and the possibility of modifying architectural objectives over time.
-
3.
High-level architectural objectives for bio-hybrids require translation into methods for steering low-level self-organising behaviours of living specimens; this requires automated methods for ‘compiling’ designs into suitable instructions to be enacted by relevant control mechanisms. Feedback from low-level actions to high-level objectives is essential to evaluate and steer the system.
These challenges carry the implication that existing design approaches need to be extended, enriched and potentially revised to support notions of continuous design and construction. In the literature, the concept of Persistent Modelling has been presented as a paradigm for supporting continuous design through direct linkages between design models and the systems they are modelling [4]. This has been tentatively explored in the context of abiotic systems [5]. The vitality inherent in bio-hybrid systems makes them an even more suitable target for adopting a Persistent Modelling paradigm to manage the negotiation of evolving design objectives in relation to manifested and anticipated resources and conditions across the system’s lifecycle.
1.2 Motivation and Context
The work presented in this paper contributes to the EU funded ground research project flora robotica [6]. This highly cross-disciplinary project investigates how symbiotic relationships between plants and robots can be established for the purpose of growing architecture. The architectural motivation underlying this research is to contribute to an expanding effort seeking radical and potentially disruptive alternatives to current paradigms of extraction-based resource intensive construction [7,8,9]. In this case, we aim to harness the material accumulation capabilities of plants and steer this towards architectural objectives through stimulating plant tropisms.
1.3 Structure of the Paper and Scope
We limit the scope of this paper to an examination of two tasks. The first is the autonomous steering of plant growth to produce an interlaced bio-hybrid Kagome weave. The second is determining structurally productive path planning for plant growth against a given design target. Although we present these as separate studies, we later discuss their interrelation within a hypothetical Persistent Modelling workflow.
In the following section, we provide a brief state-of-the-art of relevant bio-hybrid approaches to architectural production and articulate how the work presented here contributes novel insight. In Sect. 3, we outline the methodological approach and experimental setups. In Sect. 4, we present experimental results and in Sect. 5, we present our conclusions.
2 State of the Art
2.1 Scaffolds for Bio-Hybrid Architectures
A common construction approach for bio-hybrids is the use of designed scaffolds to support, guide, contain or integrate the living complex. The research group Baubotanik has demonstrated multi-rise technical scaffolds with junctions that become fused through tree growth to create compound structures [10]. In the Fab Tree Hab concept by Mitchell Joachim, a CNC removable plywood scaffold facilitates the pleaching of tree branches into a lattice frame [11]. In the work presented here, we enrich the vocabulary of scaffold typologies by exploring Kagome weave patterns, and, in contrast to manual or passive approaches of plant steering, we investigate an autonomous method.
2.2 Plant Steering
In the literature, the autonomous shaping of Phaseolus vulgaris (common bean) to target positions in free-space using an evolved controller setup has been described [12,13,14]. In related work, the use of distributed and decentralized robotics arranged on a fixed diagrid structure has been used to collectively control the growth of the plant along a pre-defined path of the diagrid [15]. In the work presented here we consider a different task. In contrast to following a path defined by a diagrid scaffold, we seek to traverse it with an interlacing path. The assumed advantage of considering the plant as an integrated element of the weave pattern is that it can contribute structural advantage to the weave configuration as it matures.
3 Methodology and Experimental Setups
The two focused studies presented in this paper are determined through a design hypothesis that describes a speculative architectural proposition (Fig. 2) and a construction concept (Fig. 3). From this hypothesis we ask the interrelated questions: (1) can plants be autonomously steered into interlacing conditions to achieve an integrated woven Kagome structure? (2) how does the structural contribution from living plants change over time and how are the most effective plant growth paths determined?

Speculative design proposition as a hypothesis, shown in a state of early colonisation.

Construction concept hypothesis with simulated bio-hybrid tri-axial weave (left), detail of hand-woven Fallopia interlaced with maple strips (centre), progression of Fallopia and spread of leaf cover (right)
We investigate these questions through empirical and iterative testing using physical and modelled experimental setups respectively.
3.1 Experimental Setup 1: Autonomous Plant Steering
In this experiment we seek to produce a Kagome weave structure autonomously by interlacing a growing plant with prepared maple veneer strips arranged in a diagrid. To steer the growing plant, we target its phototropic behavior and stimulate this through the switching of localised light sources. Our focus is on determining feasibility, therefore we limit complexity of the task and the setup to a planar condition. Three densities (cover-ratios) of weave are investigated in an effort to determine the shaping limits of the plants and possible impediments to the process of interlacing, such as branch/leaf interference and ‘twining’ with the prepared scaffold resulting from thigmotropism (Fig. 4, bottom row). The experiments are conducted within growboxes to maintain controlled conditions.

Visualisation of the autonomous plant weaving process (top row); three densities of weave prior to extraction of central vertical weaver for substitution by plant (bottom row).
The prepared scaffold, made from 30 × 1 mm cross-section Maple strips, is orientated diagonally within each growbox to maximise planar size and provide ‘jamming’ edge support. The scaffolds are tri-axially woven to provide rigidity, with only one vertical ‘weaver’ removed for replacement by the growing plant. Two 128 W Greenception GC-4 LED grow-lamps are hung from the top of the growbox, one on either side of the weave scaffold. The setup is monitored on each side of the scaffold by three vertically arranged Raspberry Pi units with cameras taking images every hour. The images of each vertical group are automatically composited and compared with the assembled image from the other side of the weave using the Python OpenCV library. The comparison determines which side of the weave the plant’s apical meristem (growing tip) is located. This information is encoded as binary bit (0, left; 1, right) and passed as a crontab argument to switch the appropriate lamp at the next scheduled (hourly) command execution. The coordinated switching of the grow lamps aims to induce the interlacing of the plant with the diagrid structure (Fig. 4, top row). The plant is given an eight-hour rest period of darkness every 24 h.
3.2 Experimental Setup 2: Structural Modelling and Informed Path Planning
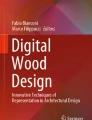
In order to perform analysis of the different growth states and the changing structural performance of the bio-hybrid structure, we first obtain indicative mechanical properties of the materials used in the weave. For this setup we use Fallopia Albertii (aka “Architect’s Comfort”) as the living species due to its vigorous growth, strong phototropic response and maturity to woody tissues within a single growth season. For the prepared diagrid scaffold we use 30 × 1 mm Maple strips for their flexibility. Three-point bending tests are carried out on different samples of the Maple strips and samples of Fallopia at different stages of growth (Fig. 5). Results are used to inform a parametric finite element model developed using Rhino6/Grasshopper and the third party plugin Karamba3D. To test and calibrate the model, an initial study is conducted using the medium density planar weave from experimental setup 1. The states of the model reflect the physical steps taken to substitute a weaver with a plant (Fig. 6).

Samples of Fallopia vine at the different stages of growth and Maple used for mechanical characterization (top left); three-point bending experimental setup (top center and right); force-displacement curve results from three-point bending tests (bottom left); flexural strength vs Young’s modulus for Maple strips and Fallopia branches (bottom right).

Parametric finite model of the weave following the physical substitution process.
The setup for the simulation process on the bio-hybrid weave is shown in Fig. 7. The geometry of the indicative plants is generated using a simplified growth model in interaction with a dynamic simulated light environment. Plants and weaves are discretised as beam elements with circular and rectangular cross-sections respectively. Materials are assumed homogeneous and isotropic. The contact interactions between the weave members are defined as spring elements with a variable stiffness in translation. This stiffness at the interaction with the plants is also expected to evolve during the growth of the plant, though it is neglected here. For simplification, the dead weight of the overall structure is the only load considered, and no initial stress resulting from the interweaving process is considered.

Simulation process on a hybrid weave panel: (a) geometry, (b) discretisation in beam elements, (c) contact interaction, (d) loading and boundary conditions, (e) displacement, (f) axial stress.
4 Results
4.1 Autonomous Plant Interlacing
Numerous growth runs have been required to modify and calibrate the setup. Therefore, for this experiment we have used Phaseolus vulgaris as a model species. Phaseolus is a climber with rapid growth and quick germination from seed to provide many specimens. It is not a viable species for the structural task, but in this experiment our prime concern has been to establish the viability of autonomous interlacing.
The first findings relate to plant/weave interactions across the three densities of weave. We use the vertical edge length of the reciprocal triangle as a metric to describe the weave density – measured from the centerlines of the maple strips. In the case of the least dense weave (160 mm), we found that plants were not able to ‘bridge’ between the weavers of the diagrid. Rather, they tended to fall and follow the nearest rising Maple strip, with thigmotropism appearing to become the dominant stimulus. For the most dense weave (70 mm), we found that plants could not navigate tightly enough to achieve interlacing, and, again, resorted to following the diagrid with uncontrolled crossings from one side of the weave to the other. The medium density weave (110 mm) has proven to be most successful, although success rates have been low due to a number of factors. For example, thigmotropism has proven to be a strong stimulus triggering search behavior of the plant and resulting in twining around diagrid strips (Fig. 8, left).

Negative result due to twining behavior induced by a lamp switching controller failure (left). Evidence to counter the assumption that the plant tip will be the highest point of the identified plant (right).
There have also been developmental findings with the autonomous control system such as inaccuracies in plant detection arising from misalignment in composited images from the front and back of the weave due perspective, image angle and distance (Fig. 9, left). This has led to false identification of ‘sidedness’ resulting in inappropriate light stimulus to steer interlacing. In addition, early approaches to plant tip isolation in the images have proven to be insufficient, with false readings due to geometric issues or image processing methods based on false assumptions about the tip occupying the highest point in the image (Fig. 8, right). Software improvements using dense optical flow in combination with multiple blob detection, image alignment and location markers on the diagrid have been implemented (Fig. 9, right) together with hardware improvements such as blacking out the reflective inner lining of the growboxes to improve the directionality of light stimuli. However, these improvements have not yet been tested sufficiently to claim a higher rate of positive results in the interlacing task (Fig. 10).

Composite image showing misalignment between front and back images resulting in ambiguous plant tip identification (left). Automated image correction guided by markers applied to horizontally flipped right-hand image. The green dot in the image marked left indicates the improved deviation (right).

Positive interlacing condition after software and hardware improvements, but not yet sufficiently tested to claim higher and consistent success rates.
A change of species will also be considered for subsequent experiments. Initial phototropic tests on Fallopia Albertii with diametrically opposed light stimulus show rapid change in direction of the meristem with full alignment to the stimulus vector in approximately 35 min. The meristem also exhibits a stiffer geometry which may result in straighter growth paths.
4.2 Structurally Informed Plant Growth Path Planning
A preliminary static linear analysis is performed on the hybrid panel to determine the distribution of the axial stress and displacement in the plants and the weaves. While they are supported by the strips at earlier stages of growth, the plants are shown to progressively reinforce and contribute structural capacity back to the weave (Fig. 11).

Displacement of weave in early plant growth (left) and later growth (right)
This process can be applied to more complex woven geometries to determine coarse approximations of the minimum plant growth requirements in areas where they will provide a higher structural capacity once they reach maturity. Reaching these areas requires plant growth path planning. Different strategies can be considered for the identification of these paths, for example, using stress lines that represent the directions in which effort is transmitted (Fig. 12, left). With this approach, stress lines are mapped to the nearest weavers which are identified for substitution by plants. Another option – complementary to the first – is to strengthen the structure around the locations showing an excessive displacement or stress on the weave geometry (Fig. 12, right).

Principle stress-lines represented on the design target (left); displacement distribution in the weave geometry of the design target (right)
Whichever strategy is adopted, several iterations are necessary to ensure the structural integrity of the design at different stages of growth (Fig. 13). This is particularly important at earlier stages of plant growth to determine the position of temporary supports while waiting for plant material to mature to the required performance. Such supports can offer temporary architectural opportunity during this phase of the growth career, before being relocated or removed.

Still from growth sequence animation with plant colonisation following growth pathways informed by structural analysis
5 Conclusion
In this paper, we have presented a novel and speculative design concept for a bio-hybrid architectural system. A hypothetical architectural proposition has been used to define two experiments to test the concept’s feasibility. The task of physically interlacing plants with a diagrid scaffold using an autonomous control system has proven challenging to accomplish. We have identified software and hardware issues and briefly described modifications to the setup, but have not yet achieved consistent positive results with the simplified task of interlacing on a vertically orientated plane in a controlled environment. This leads us to question the feasibility and practicality of achieving the complex geometrical interlacing suggested by our design hypothesis (Figs. 2 and 13), and doing so in open field conditions on entire structures. This segues into a critique of the structural role we have identified for the plants and the necessity to be so deterministic with the interlacing strategy. A more viable proposition could be to grow bio-hybrid construction components with plants fulfilling an adaptive shading task and/or acting as distributed environmental sensors – tasks where directionality of growth might still need to be influenced, but not so deterministically.
We remain convinced that a Persistent Modelling approach for designing, realising and managing bio-hybrid architectures is essential, even for a revised component-based construction concept. The work presented here offers some tentative insight into workflows and necessary interfaces required between design modelling and ‘runtime’ controllers. However, only the interface between design modelling and path planning has been demonstrated. Further interfaces are required to compile low-level controller instruction from higher-level path-planning objectives. In addition, feedback is currently limited to each task silo. Closing the loop with feedback from controllers to design models will be a necessary next step to fully engage the long-term growth and adaptation characteristics of a bio-hybrid architectural system.
References
Ayres, P., Martin, A.G., Zwierzycki, M.: Beyond the Basket Case: a principled approach to the modelling of Kagome weave patterns for the fabrication of interlaced lattice structures using straight strips. In: Advances in Architectural Geometry 2018, pp. 72–93. Chalmers University of Technology (2018)
Mesnil, R., et al.: Linear buckling of quadrangular and Kagome gridshells: a comparative assessment. Eng. Struct. 132, 337–348 (2017)
Stolarz, M.: Circumnutation as a visible plant action and reaction: physiological, cellular and molecular basis for circumnutations. Plant Signal. Behav. 4(5), 380–387 (2009)
Ayres, P. (ed.): Persistent Modelling: Extending the Role of Architectural Representation. Routledge, Abingdon (2012)
Ayres, P.: Microstructure, macrostructure and the steering of material proclivities. In: Manufacturing the Bespoke, pp. 220–237. Wiley (2012)
flora robotica – societies of symbiotic robot-plant bio-hybrids as social architectural artifacts. http://www.florarobotica.eu. Accessed 05 June 2019
Elsacker, E., et al.: Mechanical, physical and chemical characterisation of mycelium-based composites with different types of lignocellulosic substrates. BioRxiv, p. 569749 (2019)
Vallas, T., Courard, L.: Using nature in architecture: building a living house with mycelium and trees. Front. Archit. Res. 6(3), 318–328 (2017)
Heisel, F., et al.: Design of a load-bearing mycelium structure through informed structural engineering. In: Proceedings of the World Congress on Sustainable Technologies (2017)
Ludwig, F., Schwertfreger, H., Storz, O.: Living systems: designing growth in Baubotanik. Archit. Des. 82(2), 82–87 (2012)
Fab Tree Hab. https://en.wikipedia.org/wiki/Fab_Tree_Hab. Accessed 29 Mar 2019
Wahby, M., et al.: Evolution of controllers for robot-plant bio-hybdrids: a simple case study using a model of plant growth and motion. In: Proceedings of the 25th Workshop on Computational Intelligence, pp. 67–86 (2015)
Wahby, M., et al.: An evolutionary robotics approach to the control of plant growth and motion: modeling plants and crossing the reality gap. In: 2016 IEEE 10th International Conference Self-Adaptive and Self-Organizing Systems (SASO), pp. 21–30 (2016)
Hofstadler, D., et al.: Evolved control of natural plants: crossing the reality gap for user-defined steering of growth and motion. ACM Trans. Auton. Adapt. Syst. (TAAS) 12(3), 15 (2017)
Wahby, M., et al.: Autonomously shaping natural climbing plants: a bio-hybrid approach. Roy. Soc. Open Sci. 5(10), 180296 (2018)
Acknowledgements
This work was supported by the European Union’s Horizon 2020 research and innovation program under the project flora robotica – FET grant agreement no. 640959.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Ayres, P., Buchwald, E.F., Gatz, S., Bornaz, S. (2020). Living Weaves – Steps Towards the Persistent Modelling of Bio-Hybrid Architectural Systems. In: Gengnagel, C., Baverel, O., Burry, J., Ramsgaard Thomsen, M., Weinzierl, S. (eds) Impact: Design With All Senses. DMSB 2019. Springer, Cham. https://doi.org/10.1007/978-3-030-29829-6_35
Download citation
DOI: https://doi.org/10.1007/978-3-030-29829-6_35
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-29828-9
Online ISBN: 978-3-030-29829-6
eBook Packages: EngineeringEngineering (R0)