
Abstract
From the point of view of road safety, it is necessary to focus the attention to the driver. Despite the increasingly popular topic of autonomous vehicles, the driver is still a central element of the transport system. Human in the transport system causes mistakes and failures that may result in traffic accidents. Testing drivers in real road traffic is in many ways difficult. It is time-consuming and also expensive, because it is necessary to have fully functional vehicle and lot of fuel. Last but not least, experimental drivers may get into dangerous situations in road traffic and there is also risk that they cause a traffic accident. Therefore this article deals with using of driving simulators for driver testing. Due to the limited use of current equipment in University Science Park, it also describes the simple modification of the training driving simulator to a light driving simulator. Simple rebuilding was done to exchange software to enable editing of the virtual environment. The paper describes the modelling of the virtual environment as well as the process of its testing and the initial results of research in the new environment. At the end of the paper are presented the initial results of the graphical recording of the driver’s activities together with accurate recording of the actual heart rate during the experimental driving in laboratory conditions.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Road safety is still a very actual topic. The number of registered vehicles has not yet reached the maximum. The car becomes a part of human’s life. The development of the number of registered vehicles in the Slovak Republic is shown in the Fig. 1. With the development of technology and also electronics in vehicles, the driving of vehicle is safer and safer. New electronics safety systems, whether active or passive, are commonly used and some of them are obligatory used. However, it still solves only the technical security issue. More than nine of ten traffic accidents are caused by human error. For this reason, it is especially necessary to focus on the human factor, because the man is faulty and his failure can cause a road accident. Human factor in the driver - vehicle - communication - environment is an important element related to traffic psychology.

Numbers of registered vehicles in Slovakia [15]
From the point of view of traffic psychology, the behaviour of the driver during driving can be expressed by the following equation, respectively function [1]:
where:
-
R – driver behaviour (response to stimuli)
-
S – perceived and acting stimuli on the driver
-
O – personality characteristics of the driver
Behaviour of the driver is running on two levels. At an unconscious level, that is, automated activities of the driver. The second is the conscious level, where the driver connects consciousness with the automated activities according to changes of driving conditions and decides about the most appropriate correct choice of response [1, 2].
The transport can be safe, only if all four components of the transport system (the driver, the vehicle, the communication and the environment) are in balance. All of them contribute to achieving the overall system’s goal of ensuring the transport and its security. Safe transport have been done without accidents or feeling of danger [16]. The individual partial impacts on traffic safety are shown in the cause and effect diagram in the Fig. 2. The driver factor is connected with his physical and also physical abilities. Vehicle contributes to road safety with its technical parameters, system and condition. Communication or road ensures the road safety with its conditions, parameters and equipment. Surrounding environment can also affect the safety with visibility and also weather conditions.

Cause-and-effect diagram of road safety factors [own study]
In road transport, it is essential to know the factors that can affect the driver’s attention. The main reason is the design of environment conditions, driver’s work and rest regime, driver training and it also helps to find the causes of traffic accidents. Driver’s mistakes need to be identified and driver behaviour examined because, according to the literature, more than 90% of accidents were caused due to human factors [16]. For this reason, exploring the human psyche and the behaviour of the driver while driving is a helpful for society. An effective tool for investigating the driver-vehicle interaction or the driver - transport system interaction, are driving simulators.
2 Virtual Reality and Simulations
Virtual Reality is a term that applies to the artificial environments similar to real world, which has been constructed by computer. Virtual reality has become a common part of many industries and, last but not least, part of driving simulators. The first driving simulators were developed from training flight simulators, which had appeared during World War II. These first simulators have gone from simple mechanical projection techniques to simulated motion picture display systems (MPDS) that show the surrounding environment by projecting a record from a real section of the road. These kinds of simple visual system were used because to the end of 20th century, there was absence of high-performance computers. Over time, technology for creating and displaying virtual reality has become more affordable and better.
Safety and economic benefits from using driving simulators have resulted in their appearance in many areas - the automotive industry, traffic management as well as academic ground. Simple training driving simulators are used also for the training of new drivers in safe conditions. Nowadays there are many commercial driving simulator with high quality graphic and sometimes with motion system, which are used for free-time activities [5, 10, 11].
The biggest benefit of using simulation in experiments is safety and low operating costs. With a driving simulator, it is possible to examine the driver’s reactions as well as their behaviour without using a real car.
A driving simulator can be defined as a device that simulates the driving of a road vehicle by imitating the real road traffic environment. The components required for simulation and their communication are shown in the Fig. 3.

Components of driving simulator [5]
The components shown in the Fig. 3 can affect the complex validity of simulation. Components are these hardware and software parts:
-
(a)
Control devices – it is an input hardware device. The simplest input device is classic computer keyboard. The driving simulator should have at least the basic controls - the steering wheel, the gear lever, the accelerator pedal and the brake pedal. Other vehicle controls or accessories are required depending on the particular research task.
-
(b)
Visual display – this part is ensured by devices like:
-
I.
Monitor or large LCD screen or a set of such screens.
-
II.
Projection screen and projector or multi-projector system. Instead of the classic front projection, sometime it is also used rear projection and with the mirror system, it is possible to reduce the projection distance.
-
I.
-
(c)
Visual database – this database contains all the models that are in the virtual simulator environment. They are shown by visual display.
-
(d)
Vehicle dynamic model – it is used to create vehicle movement.
-
(e)
Motion base system – often a motion platform with varying degrees of freedom ensures the simulator’s movement interaction.
-
(f)
Communication network channel – is a necessary component because the data transfer between components of the simulator is extremely important and any delay time has a negative impact on the simulation validity.
3 Current Equipment and Its Possibility for Use
At present, it is possible to use only one simulator in University Science Park (part of University of Žilina). This device labelled as SNA-211 REN is a training driving simulator. It is shown in the Fig. 4 and it was acquired for road transport research. This simulator is imitation of the Renault Magnum cabin. From the construction design point, it is a stationary simulator without a motion system or vibration platform. Its steering wheel has not force feedback. Seat adjustment and feedback of pedals and parking brake is ensured by a pneumatic system [14].

Driving simulator SNA – 211 REN [own study]
3.1 Hardware of the Simulator
The training driving simulator is built from the original parts of the truck interior, including the driver’s seat. The device consists of the following components [7, 8, 12, 13]:
-
driver’s cabin,
-
display screens,
-
instructor’s table with computer,
-
compressor as a source of compressed air,
-
electric and data cables, USB hub and air hoses.
Simulator’s controls and indicators are technically good; their interaction with the software is included. The driver’s seat with seatbelt is adjustable, as well as the steering wheel and the rear-view mirrors with the control levers identical to the real vehicle. Rear view mirrors are rendered by software on the side LCDs in the driver’s field of view. Suspension and adjustment of the driver’s seat, pedal force feedback, and parking brake are controlled by the air. The air pressure is provided by an external electric compressor located outside the cabin. The gear lever of the simulator has 5 positions and two switches - one for fast/slow gears and the other one for high/low gears. The training driving simulator also includes: functional dashboard, turn signals all headlamp modes, parking brake, three-position retarder, horn and engine brake. Functional hardware equipment ends with two rotary regulators of sound volume and volume of instructor’s voice instructions.
The virtual environment is displayed on three similar GoGen TVF50425 LCD screens with a 1920 × 1080 pixel resolution and a 50″ (127 cm) diagonal, with the two side screens facing the 45° angle to the driver. The settings of the simulator software can be changed via an instructor computer with a separate smaller monitor.
3.2 Software of the Simulator
The training driving simulator SNA – 211 REN includes only two vehicle types. It is not possible to choose any vehicle for any scene. These two vehicles are:
-
truck Renault Magnum s with semitrailer or tanker,
-
and solo vehicle Renault Midlum.
The simulator software is very simple, so it is difficult to use it for research activities. It allows only the following setup options:
-
scene type selection (36 options: training field, motorway, village, etc.),
-
visibility setting (3 options: day, fog, night),
-
adhesion setting (3 options: 90% asphalt, 50% gravel, 10% ice),
-
vehicle load (3 options: 0%, 50%, and 100%).
The evaluation part of the software, which should ensure outputs, is aimed only at the proper driving of the vehicle. It can show only the driver’s mistakes during driving a vehicle. All information about the current status of the simulator controls is displayed on-line on the instructor’s computer display.
3.3 Problems and Possibilities for Use
The SNA-211 REN is a training device that is not designed for driver-vehicle interaction research. It does not record the position and behaviour of the vehicle and there is not possibility to modify virtual environment. It was necessary to find other way to use the simulator. For few experiments the external recording was used and then the recorded data were processed and evaluated. It is obvious that this process is extremely laborious and may not always provide the required accuracy of output data.
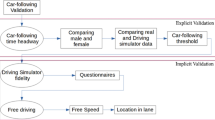
The simulator device has never been used at Department of Road and Urban Transport. First experimental rides were performed by few young drivers. After the experiment, drivers fulfilled the simple questionnaire about their skills and opinions, which can help to enhance the validity of simulation. Results from questionnaire are shown in the Fig. 5 [9].

Possibilities of increasing the simulation validity [own study]
3.4 Alternative Use of the Simulator’s Cabin
It is obvious that the original simulation software is not appropriate for research activities. It was necessary to find software, which could be used and which could replace the original software. Therefore the commercial simulation software from the Czech company SCS Software was used for further experiments. Unfortunately, it is possible to use only a central screen of three usable. The simulation software is not customized for more screens with different angles.
Physically, the central LCD LED screen is connected with computer via an HDMI cable, which is reduced to DVI input on the computer. This connection ensures both audio and video transmission. For sound the built-in speakers are used. The keyboard and mouse were also plugged into the new computer to enable simulation software and support programs in a simple way.
The simulator is controlled by the Momo Racing Wheel joystick, which is connected to the computer through the USB interface. It’s a steering wheel assembly with a gear lever and pedals. The steering wheel component replaced the original steering wheel on the shaft, and the pedal component was placed instead of the original pedal (brake and accelerator) on the floor of the simulator.
The individual components of the simulator are physically connected according to scheme in the Fig. 6.

Scheme of simulator connections [own study]
3.5 Graphic Interface
The narrower field of view, which is caused by using only one screen, is balanced by a high-quality graphic processing of the entire simulation. Graphic is incomparably better and database of individual objects is huge. Also textures and weather simulation has better quality.
In the Fig. 7, there is a graphical comparison of three virtual environments. First on the left is the virtual environment of the current driving simulator SNA – 211 REN from Czech company JKZ Olomouc, in the middle there is virtual reality used by Škoda Octavia simulator at the ČVUT Faculty of Transport in Prague, and on the right is a preview of simulator graphics from SCS Software.

Graphic comparison of different simulation software [own study based on 16]
4 Creating of Virtual Environment
Map editors in simulators created by SCS Software are basically the same. However, this is a feature that is hidden in the game. To run the map editor, it is necessary to activate the console by editing the settings from uset g_developer “0” and uset g_console “0” to uset g_developer “1” a uset g_console “1” in the config.cfg file located in the My documents folder. This step allows to press key “~” in program, which opens the console. After typing the command “edit”, the Map Editor is opened.
For a simple example of virtual environment creating, the SCANIA Driving Simulator and its first exercise map was used. This predefined virtual environment can be edited using the command “edit free_ride_01” after running the console.
After the map editor is started, it is possible to start editing the virtual environment, but it is important to note that the final model of environment is not automatically integrated to the simulator’s database. It is necessary to perform multi-step process, during which the model is compressed to special file.
The construction of the transport infrastructure as well as the surrounding objects (for example: natural surfaces, vegetation, buildings etc.) is relatively sophisticated and simple, because the whole virtual environment can be composed of predefined blocks and, moreover, the connection of the communications is intelligent and in some cases the program itself creates the most suitable arc. Virtual environments can be very diverse, even though their creation is time consuming. The final design of environment must be very precise, because we do not want to let drivers ride in virtual world with imperfections, such as deaf places where an infinite space is visible.
Another way of creating a virtual environment is used by the Department of Vehicle Technology of Czech Technical University in Prague. For faster creation of virtual environment there is used a system of virtual blocks with road infrastructure (Fig. 8). Adjacent blocks are compatible – connectable together, so there is simple way to quickly and efficiently create a road without stereotypical surrounding environment. This makes it possible to avoid the unrealistic environment of communication (grass or a simple hill around the path) that occurs in the SNA-211 REN.

Three square blocks with road connected together [6]
4.1 Infrastructure Creating in Map Editor
In the next part is described an example of creating an infrastructure in the Map editor. This type of environment was used for testing how the type of road affects the driver speed. The different types of road with different horizontal traffic marking were used.
If we do not want to create a whole new map, it is good to open a closed map (for example “free_ride_01” and then begin to create the communication. In this case, there will be 500 m long straight sections connected by the arcs, each straight section being formed by another type of road surface according to Table 1.
The plan of infrastructure should be prepared before modelling. In the database, there are many patterns, objects and wide range of their properties. If the first type of road for the first segment of road is chosen, it is possible to draw the communication directly in the three-dimensional map editor without interruption. However, in order to make the surroundings of communication realistic, it is advisable to add vegetation or other objects. The creation of the environment is time consuming, but it increases the validity of the simulation.
4.2 Saving and Exporting of Virtual Environment
In this case, it should be noted that the created map can be simply saved through the “Save Map” function, but it is only a save on a disc, not to the simulator’s database. For this reason, it is necessary to create a special file that will be inserted into the simulator as a mode. This will automatically overwrite the original map background at each start. The first step is to save the file “free_drive_01.mdb” to the created “map” folder anywhere in computer. Subsequently, the entire folder is archived into a file with the “.zip” file without compression. Then the file extension “zip” must be changed to “.scs”, which is internal type of files created by SCS Software Company. This file is uploaded to the “Mods” folder, whose files start overwriting the original files (whether map or vehicle) after starting the program.
5 Practical Measurements
One of the greatest benefits of using a driving simulator is the fact that it is possible to test the behaviour of the driver which is common on the road traffic but is against the law. For example: drunk driving, using a mobile phone while driving, and similar activities not related to driving but also requiring the attention of the driver. Such activity may be the operation of a radio, navigation device or control of the vehicle’s air conditioning.
5.1 Measurement of Driver’s Behaviour
After connecting the simulator components, a new measurement was performed and new way of record was used. In the past there was performed eye tracking research with old simulator software. Department of Road and Urban Transport does not have an eye tracking device, so it was necessary to look for new methods for analysis of driver’s behaviour. For this reason, an external video recording from a digital video camera was used. The video camera was placed on the console (Fig. 8) above the driver’s head in the driving simulator.
Figure 9 shows the evaluation of record in software Pinnacle Studio 19. The labels of individual motions of driver are accurate and they mark the start and end of activity of right hand. Subsequently, the time points were exported and converted to the Microsoft Excel.

Manual evaluation from records [own study]
The individual points are marked on the time axis x of the graph in the Fig. 10. The picture shows activity of right hand: the value “1” means that the hand is on a steering wheel and value “2” says that there is a contact with the gear lever, the time that elapsed between the release of the steering wheel and new fixation.

Record of the driver’s activities during free ride [own study]
After the free ride, the driver continued to drive and began the first task. He must to find the address on GPS navigation device and start the voice navigation. This experiment is evaluated in the Excel three-point graph, which is shown in the Fig. 9. The value “3” is added to graph and it means that his hand was touching the device.
During the experimental ride, there was also recorded the driver’s heart rate as a stress indicator. The graphs in Figs. 11 and 12 are synchronized. Heart rate was recorded by new device Polar H10, which can measure the human’s pulse. Recorded values are transmitted to smartphone via Bluetooth interface and then they are sent on the internet server. Then it is possible to download them with any computer from internet, they could be exported to a .csf file and easily imported into a Microsoft Excel table editor.

Record of the driver’s activities during task [own study]

Record of the driver’s heart rate [own study]
6 Conclusion
Previous examples of experiments used the virtual environment created in map editor and new configuration of simulator. It brought some disadvantages connected with new software, which also allows making new virtual environment.
The creating of virtual environment is long-time activity, which can significantly affect the quality of simulation. Off course, the virtual environment is only a means for experiments. For better results, the following rules should be met:
-
virtual infrastructure planning before practical modelling,
-
decision about surfaces, traffic signs and other equipment,
-
created environment should be similar to real part of world,
-
a wide database of virtual objects is necessary, it is not possible to create all individual parts of virtual environments (trees, lamps, cars…)
-
environment should be tested by independent driver or person, who can identify the mistakes made by creator,
-
if the static part of simulation is ready, the dynamic parts can be added (for example sudden obstacle…).
References
Čičáková, K.: Expert system traffic v dopravno-psychologickej praxi na Slovensku: magisterská diplomová práca. Univerzita Palackého, Olomouc, 104 s. (2011)
Kubíková, S., Kalašová, A., Černický, Ľ.: Microscopic simulation of optimal use of communication network. In: Mikulski, J. (ed.) TST 2014. CCIS, vol. 471, pp. 414–423. Springer, Heidelberg (2014). https://doi.org/10.1007/978-3-662-45317-9_44
Kalašová, A., Krchová, Z.: Telematics applications and their influence on the human factor. Transp. Prob. 8(2), 89–94 (2013)
Čulik, K., Kalašová, A., Kubíková, S.: Simulation as an instrument for research of driver-vehicle interaction. In: Stopka, O. (ed.) 18th International Scientific Conference-Logi 2017, MATEC Web of Conferences, E D P Sciences, Cedex A (2017)
Fouladinejad, N., et al.: Modeling virtual driving environment for a driving simulator. In: 2011 IEEE International Conference on Control System, Computing and Engineering, Penang, pp. 27–32 (2011)
Orlický, A.: Automatická tvorba silniční infrastruktury ve 3D pro vozidlové simulátory: diplomová práca. ČVUT Praha, Praha, p. 106 (2016)
Petro, F., Konečný, V.: Calculation of emissions from transport services and their use for the internalisation of external costs in road. Procedia Eng. [elektronický zdroj] 192, 677–682 (2017). ISSN 1877-7058
Berežný, R., Konečný, V.: The impact of the quality of transport services on passenger demand in the suburban bus transport. Procedia Eng. [elektronický zdroj] 192, 40–45 (2017). ISSN 1877-7058
Gnap, J., Konečný, V., Poliak, M.: Elasticita dopytu v hromadnej osobnej doprave (Demand elasticity of public transport). Ekonomický časopis (J. Econ.) 7, 668–684 (2006). ISSN 0013-3035. - Roč. 54
Poliak, M.: Impact of road network charging system on pricing for general cargo transportation. Promet Traffic Transp. 24(1), 25–33. https://doi.org/10.7307/ptt.v24i1.263
Poliak, M.: The relationship with reasonable profit and risk in public passenger transport in the Slovakia. Ekonomicky Casopis 61(2), 206–220 (2013)
Poliak, M., Semanová, Š., Poliaková, A.: Risk allocation in transport public service contracts. Ekonomski Pregled 66(4), 384–403 (2015)
Gnap, J., Konečný, V.: The impact of a demographic trend on the demand for scheduled bus transport in the Slovak Republic. Commun. Sci. Lett. Univ. Žilina 10(2), 55–59 (2008). ISSN 1335-4205
https://www.minv.sk/?celkovy-pocet-evidovanych-vozidiel-v-sr. Accessed 15 Nov 2019
Interné materiály z výskumnej činnosti, ktoré poskytol Ing. Adam Orlický (Ústav dopravních prostředků Fakuty dopravní ČVUT v Prahe)
Kalašová, A., Faith, P., Paľo, J.: Dopravné inžinierstvo. Prvé vydanie. EDIS - vydavateľstvo ŽU, Žilina, 194 s. (2006). ISBN 80-8070-634-4
Acknowledgment
This paper was developed under the support of project: MSVVS SR VEGA 1/0436/18 KALAŠOVÁ ALICA – Externalities in road transport, an origin, causes and economic impacts of transport measures.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Čulík, K., Kalašová, A., Harantová, V. (2019). Creating a Virtual Environment for Practical Driving Tests. In: Mikulski, J. (eds) Development of Transport by Telematics. TST 2019. Communications in Computer and Information Science, vol 1049. Springer, Cham. https://doi.org/10.1007/978-3-030-27547-1_8
Download citation
DOI: https://doi.org/10.1007/978-3-030-27547-1_8
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-27546-4
Online ISBN: 978-3-030-27547-1
eBook Packages: Computer ScienceComputer Science (R0)