
Abstract
The block element method (Babeshko in Ecol Bull Res Centers Black Sea Econ Coop (BSEC) 2:13, 2014, [1]), which was elaborated by V. A. Babeshko and developed by his disciples, makes it possible to solve boundary-value problems stated for arbitrary convex domains and described in terms of arbitrary linear systems of differential equations in finite-order partial derivatives. The boundary-value problems are assumed to be properly stated. The domains can be bounded, semi-bounded and unbounded. Moreover, the method can be applied to the finite aggregate of domains, which interact over shared boundaries. According to the block element method, the boundary-value problem is set in the topological space and reduced to the system of functional equations using external analysis tools. From the pseudo-differential equations obtained due to differential factorization and automorphism, integral equations are extracted, which correspond to certain boundary conditions. A large number of variations of the block element method have been developed so far for the three-dimensional setting of boundary-value problems for various mathematical physics equations. The method is highly versatile, however, it requires the knowledge of topology, differential geometry, multidimensional complex analysis, external analysis, i.e. the disciplines, which are normally not included in the standard mathematics curricular at the university level. To increase the comprehension of the method, it is necessary for scientific and methodological purposes to study in detail how comparatively simple problems are solved by this method. The research provides a detailed algorithm of the block element for the model boundary-value problem, which is described by the Bessel equation for the circular domain.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Statement and Analytical Solution of the Boundary-Value Problem
Let us consider for the circular domain \(\Omega\) with the radius \(r_{0} > 0\), the equation:
Hereinafter, we will consider the boundary-value solutions:
which depend only on the radius \(r = \sqrt {x_{1}^{2} + x_{2}^{2} }\). Equation (32.1) for the function, which depends only on the radius r, can be written as follows:
The general solution of the problem (32.3), (32.2) is written in terms of modified Bessel functions \(I_{0} ,K_{0}\) [2] as
Considering the known properties of functions \(I_{0} ,K_{0}\) [2]:
with respect to \(C_{1} ,C_{2}\), we obtain the equation system:
whence it follows that
It is easily to show that
In this case, we obtain:
The general representation of solving a boundary-value problem (32.3), (32.2) takes the form:
Solution (32.5) consists of two summands:
Solution \(\varphi^{(1)}\) is bounded by
Solution \(\varphi^{(2)}\) is not bounded, because it has a singularity at zero due to properties of Hankel function:
Expression (32.5) provides a general representation of the solution for an internal problem with boundary conditions (32.2), as well as for the corresponding external problem at \(r \ge r_{0}\), which is stated below.
Let us additionally restrict the solution of the boundary-value problem (32.3), (32.2). For the internal problem, this restriction leads to \(\varphi^{(2)} (r) \equiv 0 \leftrightarrow C_{2} \equiv 0\), which is equal to the condition
Whereas \(\mathop {\lim }\nolimits_{{kr_{0} \to \infty }} \frac{{J_{0} (ikr_{0} )}}{{J_{1} (ikr_{0} )}} = - i\), then, at k > > 1
which is equivalent to the boundary conditions:
Similarly, in order to restrict the external problem, the condition \(\varphi^{(1)} (r) \equiv 0 \leftrightarrow C_{1} \equiv 0\) should be satisfied, then:
Taking into account that
then, at k >> 1
Therefore, at k >> 1, it is possible to use the expressions (32.10) as approximated boundary conditions for the internal problem, and relations:
for the external problem. The restriction requirement results in the fact that the values \(f_{1} ,f_{2}\) cannot be arbitrary and must satisfy (32.8) or (32.11). At large k, exact terms (32.8) and (32.11) can be replaced by approximated conditions (32.10) and (32.14), respectively.
2 Block Element with a Circular Boundary
According to the general algorithm of the block element method [1] in the case of a two-dimensional domain \(\Omega\), we introduce the double forward and inverse Fourier transforms:
Let us apply the forward transform (32.15) to the (32.1) and the Stokes formula [3] to the surface integral, and obtain the functional equation:
Here \(\partial\Omega\) is the boundary of the domain \(\Omega\), \(\omega\) is the external differential form. As a result, we obtain:
Let us introduce the following coordinates:
After some uncomplicated transformations, we obtain
Integrals over dr in (32.19) are equal to zero, while when the circle \({\text{d}}r = 0\), only integrals remain over \({\text{d}}\psi\). As a result, we obtain:
Let us write the formula (32.20) as follows:
Next, let us apply the inverse Fourier transform (32.15) to the expression (32.21) and obtain
The transformations of the integral (32.22), which are described below in Appendix, result in
The expression (32.23) is an integral representation of the restricted solution of the problem (32.3), (32.2), which can be used for calculations, when \(f_{j}\) are known. Using the contour unfolding operation [4], we can calculate this integral accurately applying the residues theory. Let us write the integral (32.23) as follows:
where \(F_{0} (u) = f_{2} \frac{{J_{0} (ur)r_{0} }}{{(u^{2} + k^{2} )}},F_{1} (u) = f_{1} \frac{{J_{1} (ur)ur_{0} }}{{(u^{2} + k^{2} )}}\). Functions \(F_{0} ,F_{1}\) have the property: \(F_{n} ( - u) = ( - 1)^{n} F_{n} (u),n = 0,1\). When we put down the Bessel functions \(J_{0} (z),J_{1} (z)\) as a sum of the Hankel functions \(J_{n} (z) = \frac{1}{2}\left( {H_{n}^{(1)} (z) + H_{n}^{(2)} (z)} \right)\) and apply the contour unfolding operation, we obtain:
The exponential decrease of the Hankel functions \(H_{j}^{(1)}\) makes it possible to close the contour of integration upwards in the upper half-plane and obtain the integral value (32.24) through the residue in the pole \(u = ik\) as
It is obvious that the latter expression agrees closely with the bounded solution of the inner problem (32.6). Let us show that at \(0 < r_{0} < r\), the integral (32.23) is equal to zero. In fact, it is possible to put down the function \(J_{0} (ur)\) as a sum of the Hankel functions and turn the contour as shown above. By closing the contour at \(0 < r_{0} < r\) in the upper half-plane and by calculating the integral through residue in the pole \(u = ik\), we obtain:
The factor at the function \(H_{0}^{(1)}\) in (32.26) is equal to zero according to the condition (32.8). In the case of an approximate solution (32.9), the right-hand side of (32.26) will be also equal to zero, approximately. Since \(H_{0}^{(1)} (ikr)\) decreases exponentially with the growth of r, then \(\varphi \left( r \right) \approx \exp \left( { - k\left( {r - r_{0} } \right)} \right)\) at large r. Moreover, it is obvious that integral (32.26) describes the restricted solution (32.7) of the corresponding external problem, where \(f_{1} ,f_{2}\) and k are bounded by the relations (32.11) or (32.13). The estimations for the internal problem, which are shown below, are identical with the estimations for the external problem, therefore, we do not consider them separately.
The integrals (32.23), (32.24) represent the block element for the boundary-value problem (32.3), (32.2). After the values \(f_{1} ,f_{2}\) are found accurately or approximately, the integral (32.23) can be calculated numerically with a high accuracy, e.g. by means of the integrating algorithms of strongly oscillating functions [5]. In this case, the integral (32.23) using the contour unfolding procedure, which is described above, can be calculated accurately using the theory of residues.
3 Approximate Solutions
In the case under consideration, we obtain boundary values \(f_{1} ,f_{2}\) by applying an analytical solution (32.8), which is not, understandably, always possible. When the second value is given, the block-element method makes is possible to find (accurately or approximately) one of the boundary values \(\left( {\varphi \;{\text{or}}\;\frac{\partial \varphi }{\partial r}} \right)\) from the solutions of corresponding equations, which are described further.
Let us decompose the unity and introduce local coordinate systems \(\alpha^{\mu } ,x^{\mu }\) [6]. As a result, the integrals over \({\text{d}}x_{2}\) will retreat, and only integrals over \({\text{d}}x_{1}\) will remain in the integral (32.17). We then obtain
The characteristic equation in Fourier terms takes the form \((\alpha_{1}^{2} + \alpha_{2}^{2} + k^{2} ) = 0\). In any new coordinates, we obtain \(\left( {\alpha_{1}^{\mu } } \right)^{2} + \left( {\alpha_{2}^{\mu } } \right)^{2} + k^{2} = 0\). Let us indicate the roots of the characteristic polynomial \(\alpha_{2 \pm }^{\mu }\), where «+» stands for the upper half-plane and «−» stands for the lower one. Then
The integral equation set to determine the unknown quantities \(\frac{{\partial \varphi_{\mu } }}{{\partial x_{2}^{\mu } }},\varphi_{\mu }\), which are constant in any coordinate system, can be written as follows:
When \(\varphi_{\mu } = f\), the degenerate solution of the integral equation can be written as
It follows that
Thus, we obtain approximate solutions of the function \(\varphi_{\mu } = f\) and the derivative \(\frac{{\partial \varphi_{\mu } }}{{\partial x_{2}^{\mu } }} = kf\). It is possible to obtain a more accurate solution of the integral equation by using the Fourier transform, i.e.
We therefore obtain approximately:
In Table 32.1, the solutions of (32.8) \(f_{2}^{(1)}\), approximated solution of the integral equation (32.28) \(f_{2}^{(2)}\), and the degenerate solution (32.27) \(f_{2}^{(3)}\) are compared depending on \(1 \le k \le 10\) at \(r_{0} = 1,f_{1} = 1\). It should be noted that solutions of (32.27) and (32.28) are obtained without using analytical solution.
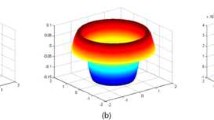
Figure 32.1a shows an example of the bounded solution of the internal boundary-value problem (32.3), (32.2): \(\varphi^{(1)} \left( {r,k} \right)\) depending on r and k, \(\left( {f_{1} = 1,r_{0} = 1} \right)\). The difference between the exact solution (32.6) and the numerical calculation of the integral (32.23) are unobservable within the scale of the picture.

a Solutions \(\varphi^{(1)} (k,r),\left( {f_{1} = 1,r_{0} = 1} \right)\); b average relative errors \(\delta^{(n)} (k)\) from (32.31)
Let us show that the integral representation (32.23) is numerically stable. Let \(f_{1}\) be set exactly, while \(f_{2}\) is set approximately and \(\tilde{f}_{2} = f_{2} - \varepsilon_{2}\), where \(\varepsilon_{2}\) is the absolute error of the solution \(f_{2}\). Then, the absolute error is as follows:
At large k >> 1
The relative error \(\delta\)
Since the properties of (32.27), (32.12) we obtain at k >> 1:
The obtained estimations of the absolute and relative errors (32.29), (32.30) mean the stability of the solution (32.23) at non-zero errors of derivative \(f_{2}\), which was obtained by formula (32.28) or (32.27). These estimations are obtained by assuming that the integral (32.23) can be calculated accurately. In practice, when we calculate the integral (32.23) numerically, the mean absolute and relative errors will be unavoidably higher, since any computing algorithm leads to additional errors. Let us introduce relative errors \(\delta^{(n)}\) as
Here, \(\varphi_{1}\) corresponds to the accurate solution (32.6) with a mean absolute error \(\varepsilon_{2}^{(1)} \approx 10^{ - 6} ,\varphi_{2}\) corresponds to the approximate solution of the integral equation (32.28) with \(\varepsilon_{2}^{(2)} \approx 0. 2 3 ,\varphi_{3}\) corresponds to the degenerate solution of the integral equation (32.27) with \(\varepsilon_{2}^{(3)} \approx 0. 5 4\).
In Fig. 32.1b, the values \(\delta^{(n)}\) are shown on the logarithmical scale in comparison with the value \(1/k\). As is obvious, at small \(k \le 10\) the average relative errors (32.31) decrease with the growth of k even more rapidly than the asymptotic estimation (32.30).
4 Conclusion
The work describes the algorithm for solving a model boundary-value problem, which corresponds to the Bessel equation for the circular domain, using the block element method. The boundary-value problem has a simple analytical solution, which makes it possible to compare the accurate and approximate solution, which is obtained using the block element method. The solution is represented as an improper integral of the Bessel functions, which can be easily calculated in quadratures and can be calculated exactly using the residues theory. The unknown coefficients of the exterior form can be found by solving the integral equation. The results of the numerical solution of the integral equation are demonstrated in the work, as well as practical and theoretical estimations of absolute and ratio solution errors obtained using the block element method and their solution stability.
References
V.A. Babeshko, O.V. Evdokimova, O.M. Babeshko, E.M. Gorshkova, I.B. Gladskoi, D.V. Grishenko, I.S. Telatnikov, Ecol. Bull. Res. Centers Black Sea Econ. Coop. (BSEC) 2,13 (2014)
M. Abramovits, I. Stigan (Eds.) Guidebook on Special Functions (Nauka, Moscow, 832 ) (1979) (in Russian)
U. Rudin, Fundamentals of Mathematical Analysis. (Mir, Moscow, 216 p) (1982) (in Russian)
V.A. Babeshko, E.V. Glushkov, Zh. F. Zinchenko, Dynamics of Heterogeneous Linear-elastic Media (Nauka, Moscow, 346 p) (1989) (in Russian)
D01AKF Subroutine. The NAG Fortran Library, The Numerical Algorithms Group (NAG), Oxford, United Kingdom, www.nag.com
V.A. Rokhlin, D.B. Fuchs, Introductory to Topology (Nauka, Moscow, 488 p) (1977) (in Russian)
Acknowledgements
The work was carried out within the framework of the State task for Southern Scientific Center of the Russian Academy of Sciences, State Registration No. 01201354241, and has been supported by RheinMain University of Applied Sciences.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendix
Appendix
In the appendix, transformations of a multidimensional integral:
into the integral of a single variable are present. Despite the awkwardness of the stated expressions, the transformations are in principle simple. The relations:
are used further. When we transform the exponent in formula 32.32), we obtain a product of series, which can be written down as a two-fold series:
Then
We further assume that:
We obtain:
Let us write down this integral as a sum of three integrals:
The coefficients at \(\psi\) in exponents can be set to zero, since the final solution should not depend on \(\psi\). Thus, we obtain for the first integral \(n = - \lambda\), for the second integral \(n = - \lambda + 1\), and for the third one \(n = - \lambda - 1\). As a result, the integral 32.38) can be written as:
While developing type \(F_{m}\) in integrals and summing up the terms in exponents, we obtain:
Since the Fourier term \(\varPhi \left( {u,\gamma } \right)\) is axially symmetric, we set the coefficients at \(\gamma\) to zero and obtain \(m = \lambda\). Then:
Let us now set \(\lambda\) in the expression (32.36) equal to zero \(\lambda = 0\). Then
Let us simplify:
Let us integrate over \(\psi ,\gamma\):
Taking into consideration that:
we finally obtain:
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Kirillova, E., Syromyatnikov, P. (2019). Block Element with a Circular Boundary. In: Parinov, I., Chang, SH., Kim, YH. (eds) Advanced Materials. Springer Proceedings in Physics, vol 224. Springer, Cham. https://doi.org/10.1007/978-3-030-19894-7_32
Download citation
DOI: https://doi.org/10.1007/978-3-030-19894-7_32
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-19893-0
Online ISBN: 978-3-030-19894-7
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)