
Abstract
This article considers the problem of computer-aided design for transverse speed gearboxes layouts of drilling-milling-boring machines on the basis of parameterization methods and means. Models and algorithms of layouts parametric modeling are developed on the basis of maximum rigidity criteria and minimum reduced load on the supports of the spindle unit. A program for determining the optimal spatial position of the gearbox output shaft using the syntax of the CAD APM WinMachine is developed. In the process of constructing the optimal layout, the permissible variants of layouts are checked using the limitations on the minimum distances between the gear wheels and the box housing. A diagram for determining the position of the intermediate shaft and its effect on the level of output shaft loading is proposed. The analysis of the influence of the optimal spatial position of the shafts on the structure of the box housing is carried out. For this optimal version of the transverse layout, a 3D model of the metal-cutting machine gearbox on the basis of the machine SF68VF4 model is developed. The efficiency of using the parametrization apparatus in the problems of multivariate designing of machine tools is grounded.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The design of different groups of metal-cutting machine tools differs depending on their purpose, and is characterized by a variety of layouts that are formed at the initial stages of machine-tool construction [1,2,3]. The layout of the machine is synthesized based on the layouts of the gearboxes and its carrier system. The design of gearboxes for metal-cutting machines (main drive (MD), feed boxes) is aimed at achieving a wide range of rotational speeds (the range of control Rn of modern machines can reach Rn = 100 … 250) and high rigidity [4, 5].
Traditionally, in the construction of speed boxes (SB), MD tends to simplify the design and makes it more compact by reducing the number of stages and limiting gear ratios. In [6], the problem of the choice of machine design by the criterion of compactness is considered. By analyzing various variants of speed gearboxes, the paper identifies the main ways to increase compactness. These include: new technical ideas (using gear train and planetary gears), an increase in the number of power flows, a reduction in the number of links in the box (using the central wheel as a clutch in the speed box [7]), the use of materials with improved mechanical characteristics [8], etc. As a criterion for evaluation the compactness of the speed boxes for machine tools, the paper considers the “specifically productivity” by which the quality of the designed structure is determined. At the same time, the author does not consider the indicator of a rational transverse layout for SB as a criterion for making decisions. In general, it can be noted that in the existing works on the design of MD convolutions [2, 4, 5], the methodology and algorithm for constructing the optimal box design according to the rigidity and accuracy criteria are not given.
One of the main ways to reduce the radial dimensions can be achieved due to the optimal transverse layout of the SB, including the position of the output shaft [4, 9]. When constructing transverse layouts, it is necessary to take into account the spatial position of the SB output shaft, which in turn affects the level of loads acting on the machine spindle and its rigidity. At the same time, the spatial position of the intermediate shaft affects the load level of the SB output shaft.
A feature of the automated procedure for designing MD metal cutting machines is a variety of alternative layouts and the need to use multi-criteria selection procedures, taking into account the specific features of the design object.
When determining the spatial position of the gears, which transmit the torque to the machine spindle, two mutually exclusive situations must be considered:
-
1.
Parallelism and unidirectional force of cutting force R and resultant P in the gearing “Input shaft-spindle”, which provides maximum rigidity of the spindle unit (minimum deflection of the forward end of the spindle). This option is used in machines for finishing processing methods.
-
2.
Parallelism and multidirectional forces R and P, which provides a minimum load on the front support of the spindle (as the most loaded in the process of the machine). In this case, the deflection of the forward end of the spindle is maximum, which is permissible only for roughing machining.
For such a multivariate task of computer-aided design for SB transverse layout with several optimization criteria, an approach based on the parametric modeling procedure will be effective.
In integrated CAD systems, the procedure of parametric modeling is considered as the initial stage of making design decisions. The formation of the parametric description is aimed at implementing the multivariate design procedure and is particularly effective in the process of improving the design and making changes to the design. In the well-known CAD: CATIA, AutoCAD, Unigraphics, etc., a quite expensive parameterizer of D-CUBED is used. A new generation of parametric modeling technologies “Parametric Modeling 2.0”, promotes improvements associated with the simultaneous modeling of many parts and their configurations [10]. Simultaneous modeling of mechanical transmissions and SB-housings makes it possible to use version 2.0 of a single parametric operation tree. Onshape’s built-in tools have expanded the capabilities of parametric modeling from one part to a variety of interconnected parts that are used independently of each other in assemblies, specifications and applications [10]. Thus, in the prefabricated speed box housings, it becomes possible to drill a hole through the base of the housing and its top cover. Similarly, the rounding is performed for all edges of this pair of nodes, which can be done in one operation.
For applied machine tool applications, it is more rational to use the own development parametric modeling modules built into the CAD. Such systems as KOMPAS-3D [11, 12] and APM WinMachine [13, 14] are equipped with the property system of parametric modeling. In KOMPAS-3D there is a geometric core C3D Modeler [15], which performs the operation of forming a geometric model and calculating its main characteristics. Thus, in the latest versions of C3D Modeler, the options for removing holes and roundings from the developed model are implemented. For such complex objects as SB-housings, this simplification allows to increase the productivity of machine design, especially in the multivariate mode and to use the simplified version in further studies in CAE-systems. For the designs of the housing parts of the SB, rather complex spatial curves with roundings are characteristic. In the geometric core of the C3D Modeler, the construction of roundings that absorb the elements of the original 3D model has been refined. Now the system operates with previously unavailable combinations of roundings, which can be used in applications for the housing parts design of various configurations.
In the well known APM WinMachine CAD/CAE system [13, 14], too, the expensive borrowed parametrizer is not used and its own parametric modeling software is implemented, both in the APM Graph drawing editor, and in the stand-alone mode. Analysis of the practice of using this parametrizer in design problems showed the promise of its use for layout problems [14, 16]. In it mode of creating a parametric model, the drawing or some part of it is studied. In this case, the parameters have a numerical expression in units of the drawing, and their set will determine the dimensional characteristics of a particular part. Graphical drawing procedure is a sequence of drawing commands and corresponding logical and analytical expressions with the specified parameters are represented. The method associated with the insertion of a parametric model in a conventional drawing as a parametric block is also effective. In this system, constructive graphic elements, designed as parametric objects in the APM Graph environment, are included in the Mechanical Data, APM Construction, and APM Technological Data databases. These parametric objects serve as the basic elements for the automatic generation of drawings in engineering modules.
2 Methods
2.1 Formulation of the Problem
Analysis of the developing task for the optimal layout of the SB and the multicriteriality of decision-making leads to the following formulation of the problem
To develop such a parametric model of the SB transverse layout, which will provide in one version the maximum rigidity of the projected machine (its spindle unit), and in another variant the minimum reduced load on the front support of the spindle.
2.2 Construction of the Parametric Model and Investigation of the Gearbox Transverse Layout
As an object of investigation, we select a horizontally milling machine with extended technological capabilities of the SF68VF4 model [17]. The design of this machine tool involves moving along the horizontal wedge slide of the headstock spindle (Z axis), to which the vertical head or additional devices are mounted (shaper spindle heads and angular heads, an arm with a package of disk milling cutters). The spindle head includes a spindle block with a tool clamping mechanism, a camshaft that transmits rotation to a horizontal or vertical spindle by means of an automatic pinion gear shifting device, a two-speed gear box, and a number of other parts and components [18]. It provides the normal operation of the spindle head. The rotation from the electric motor through the poly-V-belt is transferred to the input shaft and through the gearing to the camshaft. From the latter, rotation is transferred to the coupling of the vertical head, or to the gear of the horizontal spindle.
The well-known algorithm for designing layout schemes is constructed in the following sequence: (1) axis of shafts are carried out; (2) determine the structural elements of the parts located on the shafts; (3) the axial dimensions of all structural elements are shown; (4) a transverse layout of the gearbox is drawn.
To improve the above algorithm, a parametric model of the structural synthesis of the SB spatial configuration is proposed. Below is a fragment of the layout synthesis program by the criterion of maximum rigidity (Fig. 1).

Fragment of the transverse layout synthesis program.
The two-criterion problem of determining the optimal layout according to the rigidity criteria and the minimum reduced load on the spindle support at the initial stages can be illustrated in Fig. 2. In the first variant, the criterion of maximum rigidity is used (Fig. 2a), which is realized under the condition of parallelism and unidirectionality of the forces R and P. In the second variant, the criterion of the minimum reduced load on the front support (Fig. 2c), which is realized under condition parallelism and directionality in the opposite direction of the forces R and P.

The transverse layout of the gearbox: a – by criterion of maximum rigidity; b – the 3D-parametric fragment with programm; c – by criterion of the minimum reduced load.
The arrangement of the wheels relative to each other affects the magnitude of the force transfer elements, so that the power characteristics can be improved. Thus, the location of the intermediate gear (Fig. 3a, b) affects the forces acting on the output shaft supports. In the diagram 3b, the forces in the links F1 and F2 are almost parallel and the total force F acting on the supports is large. The change in the direction of the forces F1 and F2 (Fig. 3a) leads to a situation where they are largely compensated, and the resultant forces are less than in diagram 3b.

Diagrams of the intermediate gear influence: a – minimization of effort on the shaft supports; b – maximization of effort on the shaft supports; c – diagram with increased accuracy of kinematics.
The rational installation of the wheels also affects the characteristics of the accuracy of the kinematic circuits. The error of parasitic wheels in the kinematic chain (Fig. 3c) can predetermine itself in the error of the output link by a factor of two. The location of the parasitic wheel for a given direction of rotation is also influenced. In the diagram (Fig. 3c), the dashed line shows the best (from the position of accuracy) diagram for installing the parasitic wheel for a given direction of rotation.
General information of the installation rule requires that the rotation transmission on the parasitic wheel pass at the minimum angle γ between the contact points 1 and 2. When reversing the transmission “output shaft-spindle”, it is desirable to position the axes on the same line. Object of investigation, we select a horizontally milling machine with extended.
3 Results
On the basis of the suggested parametrical modeling procedure [19], an optimal variant of the gearbox transverse layout for drilling-milling and boring type machine was developed. The location of cutting forces R (components: Pz, Py) and forces in the gearing P (components: P0, Pr) for the boring operation is presented in Fig. 4a. The angle between the forces of R and P is 38.20°.

Transverse layout of the gearbox for the machine model SF68VF4: a – calculation diagram; b – construction of the speed box.
In this factory variant, the transverse layout is characterized by the non-optimal spatial position of the machine tool output shaft (nv) relative to the spindle (nsp), caused by the nonparallelism of the resultant forces P and R. This results in an increase in the reduced load on the spindle’s front support and a reduction in its load bearing capacity. At the same time, this spatial arrangement simplifies the construction of the speed box housing, which is shown in Fig. 4b. The rather simple design of the housing is distinguished by two original solutions:
-
On the right side of the housing a connector for mounting the gearwheel in a spatial arrangement. In this case, the common technologically realizable rectangular shape of the housing with the minimum dimensions is preserved.
-
In the lower part of the body is made a deepening of the spherical shape, which allows minimizing the dimensions of the housing with fixed initial data.
The presence of the housing bottom with the non-rectilinear shape is an interesting variant of execution for the gearbox of a milling multi-function machine. This variant allows realizing such a spatial position of the shafts and spindle, which provides maximum rigidity of the spindle unit and the machine as a whole.
However, in order to achieve the minimum load on the spindle front support, correction of the housing design is necessary, while the housing connector should be executed from the opposite side. To evaluation the change in the position of the gearbox shafts, a parametric modeling program was developed in the APM Graph environment.
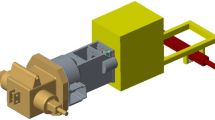
On the basis of the parametric modeling procedure for optimal transverse layouts of the drives for drilling-milling and boring machines proposed in this article, a 3D model of the horizontal spindle head construction was developed (Fig. 5) [20,21,22].

Construction of a spindle head speed box with an optimal transverse layout.
To determine the difference between the factory version (Fig. 3) and the version with optimal stiffness (Fig. 5), the Shaft calculation module is used [13, 23, 24]. Calculation of the forward end maximum deflection for the spindle in the factory version (deviation from the cutting force 32.40°) showed that the amount of spindle movement on the console increases by approximately 8% (from 0.0052 mm (Fig. 6a) to 0.0056 mm (Fig. 6b)).

Displacement of the spindle’s node: a – the best variant; b – factory version.
On the basis of the calculation performed in the APM Shaft, the possibility of loading analysis appears [25, 26]. As shown by the obtained data, the use of an optimized arrangement of the shafts of the spindle head for speed box will reduce the load on the front support (as the most loaded in the process of work): radial reactions at 9.2%; vertical reactions at 8.25%; horizontal reactions at 11.79%.
4 Conclusion
The introduction of the parameterization mechanism facilitates the formulation and solution of the designing problems for speed boxes of machine tools and their components in a multivariable mode. A significant effect in increasing the productivity of the designer gives the opportunity to quickly solve the problems of the design process with return information flows (reengineering), when a set of parametric models realizes an effective approximation to the best design variant.
The use of the developed parametrization mechanism is aimed at express analysis of the study of permissible layouts based on the constructed parametric models. Moreover, each new variant is synthesized only by a change in the optimization criterion. The proposed approach provides for verification of permissible layouts variants by introducing parameters into the parameterization program in the form of a message variable. These variables reflect the limiting distances between the gearwheel outer surface and the side wall housing, as well as the bottom of the housing. With the help of the proposed algorithms for determining the spatial position of the nodes in the main drive housing. It becomes possible to determine and control the distances from the outer surfaces of the gears to the side walls and the bottom of the housing, and also to estimate the degree of their approach to the limiting values. This will lead to recommendations for reducing the size of the machine tools drives. On the other hand, the presence of a friendly interface in the APM Graph module promptly provides information to the designer about unacceptable values of the gaps of rotating parts and the gearbox housing.
Parametric models of transverse layouts of drilling-milling-boring machines have been developed. With the help of these models, built in accordance with APM WinMachine syntax, it is possible to synthesize optimal transverse layouts, both by the criterion of maximum rigidity, and the criterion of minimum load on the front support of the spindle. On the basis of the developed parametric models of layouts, recommendations for the improvement of housing-type parts are formed.
References
Taratynov, O., Averyanov, O., Klepikov, V.: Design and calculation of metal-cutting machine tools on a computer. MGIU, Moscow (2002). (in Russian)
Pronikov, A.: Design of metal-cutting machines and machine tools. Machinery Engineering, Moscow (1994). (in Russian)
Gurtyakov, A.: Metal-cutting machine tools. Calculation and design. Yurayt, Moscow (2017). (in Russian)
Bushuev, V.: Fundamentals of the design of machine tools. Stankin. Moscow (1992). (in Russian)
Avramova, T., Bushuev V., Gilovoy, L.: Metal-cutting machines. Machinary Engineering, Moscow (2012). (in Russian)
Tolstov, K.: Choice of machine tool constructions on the basis of an estimation of their compactness. Thesis Ph.D. Stankin, Moscow (1998). (in Russian)
Shevchenko, S., Mukhovaty, A., Krol, O.: Gear clutch with modified tooth profiles. Proc. Eng. 206, 979–984 (2017). https://doi.org/10.1016/j.proeng.2017.10.581
Karpus, V.E., Ivanov, V.A.: Choise of optimal configuration of modular reusable fixtures. Russ. Eng. Res. 32(3), 213–219 (2012). https://doi.org/10.3103/S1068798X0812030124
Karpus, V.E., Ivanov, V.A.: Locating accuracy of shafts in V-blocks. Russ. Eng. Res. 32(2), 144–150 (2012). https://doi.org/10.3103/S1068798X1202013X
Girschtick, J.: Introducing parametric modeling 2.0. Isicad, vol. 162, pp. 8–14 (2018)
Ganin N.B., Design and strength calculation in the KOMPAS-3D. DMK, Moscow (2011). (in Russian)
Fomin, E.P.: Using the parametric capabilities of KOMPAS-3D Journal CAD and graphics, vol. 10, pp. 70–74 (2007)
Zamry, A.A.: Practical training course CAD/CAE APM WinMachine. Teaching-methodical manual. APM, Moscow (2007). (in Russian)
Rosinsky, S., Shanin, D., Grigoriev, S.: Parametric capabilities of the graphic module of the APM graph for the APM WinMachine system. J. CAD Graph. 11, 37–40 (2001)
Kamnev, A.: C3D labs represents the C3D Toolkit 2017. Topical technologies for developers of engineering software. Isicad, vol. 154, pp. 12–18 (2017)
Kondrashova, S.G., Khamidulina, D.A., Lashkov, V.A.: Engineering design of mechanisms using the APM WinMachine system. Bulletin of Kazan Technological University, vol. 19, pp. 193–198 (2011). (in Russian)
Eremin, A.V., Chekanin, A.V.: Calculation of the stiffness of the carrier system of the machine based on the superelement approach. Machine tools and instruments, vol. 6, pp. 12–16 (1991). (in Russian)
Shevchenko, S., Mukhovaty, A., Krol, O.: Geometric aspects of modifications of tapered roller bearings. Proc. Eng. 150, 1107–1112 (2016). https://doi.org/10.1016/j.proeng.2016.07.221
Sokolov, V., Krol, O.: Installations criterion of deceleration device in volumetric hydraulic drive. Proc. Eng. 206, 936–943 (2017). https://doi.org/10.1016/j.proeng.2017.10.575
Krol, O., Sokolov, V.: Modelling of spindle nodes for machining centers. J. Phys. Conf. Ser. 1084, 012007 (2018). https://doi.org/10.1088/1742-6596/1084/1/012007
Shelofast, V.V., Chugunova, T.B.: Fundamentals of machine design. Examples of problem solving. APM, Moscow (2004). (in Russian)
Pavlenko, I., Trojanowska, J., Gusak, O., et al.: Estimation of the reliability of automatic axial-balancing devices for multistage centrifugal pumps. Periodica Polytech. Mech. Eng. 63(1), 52–56 (2019). https://doi.org/10.3311/ppme.12801
Varela, M.L.R., Putnik, G.D., Manupati, V.K., et al.: Collaborative manufacturing based on cloud, and on other i4.0 oriented principles and technologies: a systematic literature review and reflections. Manag. Prod. Eng. Rev. 9(3), 90–99 https://doi.org/10.24425/119538
Trojanowska, J., Kolinski, A., Galusik, D., et al.: A methodology of improvement of manufacturing productivity through increasing operational efficiency of the production process. In: Hamrol, A., Ciszak, O., Legutko, S., Jurczyk, M. (eds.) Advances in Manufacturing. Lecture Notes in Mechanical Engineering. Springer, Cham, pp. 23–32 (2018)
Pavlenko, I., Trojanowska, J., Ivanov, V., Liaposhchenko, O.: Scientific and methodological approach for the identification of mathematical models of mechanical systems by using artificial neural networks. In: Machado, J., Soares, F., Veiga, G. (eds.) Innovation, Engineering and Entrepreneurship. HELIX 2018. Lecture Notes in Electrical Engineering, vol. 505, pp. 299–306 (2019). https://doi.org/10.1007/978-3-319-91334-6_41
Krol, O., Sokolov, V.: Development of models and research into tooling for machining centers. East.-Eur. J. Enterp. Technol. 3(1(93)), 12–22 (2018). https://doi.org/10.15587/1729-4061.2018.131778
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Krol, O., Sokolov, V. (2019). Parametric Modeling of Transverse Layout for Machine Tool Gearboxes. In: Gapiński, B., Szostak, M., Ivanov, V. (eds) Advances in Manufacturing II. MANUFACTURING 2019. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-030-16943-5_11
Download citation
DOI: https://doi.org/10.1007/978-3-030-16943-5_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-16942-8
Online ISBN: 978-3-030-16943-5
eBook Packages: EngineeringEngineering (R0)