
Abstract
This chapter is devoted to the mechanics of space frame structures and presents necessary formulations for the finite element analysis of space frames. It contains eight sections. Section 1.1 is introduction which summarizes briefly the beam theories in general. Section 1.2 presents deformations, equilibrium equations and rotations, differential equations and solutions, stiffness and mass matrices, consistent load vectors of three-dimensional (3D) Timoshenko beams in general. It explains also the coordinate systems and transformations of 3D beams used in the FEA. Section 1.3 is devoted to member releases and formulation of partly connected members which are represented by spring-beam elements. Section 1.4 explains the formulation of eccentrically connected members. Section 1.5 presents formulations of an interface beam element to take into account soil–beam interactions in the analysis. It explains also soil deformations under Rayleigh wave propagation and calculation of the exerted forces. Section 1.6 is devoted to the calculation of natural frequencies and mode shapes. Consequently, Sect. 1.7 presents dynamic response analysis. Section 1.8 is devoted to examples.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1.1 Introduction
Frame structures are commonly used in structural engineering applications in different forms as plane (2D) and space (3D) frames, which are made of steel, reinforced and prestressed concrete (RC), or timber. Plane frames are composed of arbitrarily oriented beam elements jointed together in a plane with distributed loading on elements and/or concentrated loads in the same plane. Before the computer technology is developed, they have been mostly used in practice by modeling a structural system and loading in different planes due to analysis simplicity. Numerous investigations have been reported on planar frames for different analysis types and conditions; see i.e., [1–10]. Today, since the capabilities and capacities of computers are at high levels and still increasing, the need of simplification of structural systems is not essential for calculation purposes and more realistic structural models are used by applying 3D beam elements [11–13] from which 2D elements are obtained as a special case. Beams are also categorized as straight or curved beams. Most structural frames are made of straight beams. Curved elements [14–18], which have considerable initial curvatures in the plane of loading, can find limited applications in practice such as arches and hooks. In complex structures, they are used mainly to obtain various structural shapes for either esthetic or load carrying purposes, and curved girders in bridge structures. The structural behavior of curved members differs considerably from the structural behavior of straight members due to the existence of initial curvature [19]. In general, two beam theories are used in the framed structural analyses: (a) classical beam theory, which is also known as the Euler–Bernoulli beam theory, (b) Timoshenko beam theory. The Euler–Bernoulli beam theory [20–22] is based on a simplified linear theory of elasticity [23, 24] and used to calculate the load carrying and deflection characteristics of beams in general [10, 25, 26]. In the development of the Euler–Bernoulli beam theory, the following assumptions are made:
-
1.
The cross-section of the beam is infinitely rigid in its own plane so that no deformations occur in the plane of cross-section.
-
2.
The cross-section of the beam remains plane after deformation.
-
3.
The cross-section of the beam remains normal to the deformed axis of the beam.
These assumptions are valid for long, slender, and thin beams of isotropic materials with solid cross-sections. For short and thick beams and for higher natural frequencies the results of the Euler–Bernoulli beam theory may be incorrect and misleading since the effect of the transverse shear deformation is not included in the formulation of the beam. Timoshenko solved this problem by including the effect of the transverse shear deformation [27, 28] at the first time. Since then many studies have been carried out on the Timoshenko beam theory, see e.g., [29–37]. The aforementioned assumptions of the Euler–Bernoulli beam theory are also valid for the Timoshenko beam theory; except that the cross-section of the beam does not remain normal to the deformed axis of the beam any more due to inclusion of the transverse shear deformation in the beam formulation. Timoshenko beam theory is applicable for both thick and thin beams and the Euler–Bernoulli beam theory is obtained as a special case of the Timoshenko beam theory. As being parallel to the development of computational facilities, classical structural analysis methods [38–40] get replaced by modern matrix and finite element structural analysis methods [41–43]. Today, the finite element method is widely used in almost all analysis disciplines. Its formulations are based on variational principles [44, 45] and explained in general in many text book, see e.g., [42, 43, 46–49].
In this chapter, the finite element formulation of the 3D Timoshenko beam element for linear analysis is presented in detail since it forms the basis of the analysis of frame structural systems. This chapter is organized somewhat elementary that all ingredients of analyses are included in the book for the completeness, which may help the readers to better understand the background information without consulting any theoretical related sources. In this chapter, attention is given particularly to solve problems of some special topics that may occur in practical applications and their programing techniques. This chapter is intended to be a theoretical manual and reference for researchers and postgraduate students, who like to be experts in the linear structural analysis and corresponding calculation algorithms. Since the beam element presented in this chapter is intended to use for the linear analysis of offshore structures, not all types of beam elements and their properties are discussed herein. It is restricted to the Timoshenko beam element with a straight length and a solid cross-section as it is mostly used in the practice.
1.2 Formulation of a 3D Timoshenko Beam Element
A space 3D beam element is a rod oriented arbitrarily in the space, which is defined by (x, y, z) coordinates, and also loaded arbitrarily. It is assumed here that the beam is straight, solid with uniform cross-section and made of homogeneous, isotropic, and elastic material. In order to formulate a 3D Timoshenko beam element we start from the formulation of curvatures under pure bending conditions.
1.2.1 Curvatures of 3D Beams Under Pure Bending
Curvatures of a space beam can be defined in two planes as depending on directions of applied bending moments. It is assumed here that the beam axis is in the x coordinate direction and bending of the beam are in the z and y coordinate directions in the (x–y) and (x–z) planes as shown in Fig. 1.1. Further, we assume that the neutral axis of the beam, which defines the location of zero strains on the cross-section, determines the elastic curve of the beam after the bending deformations. Curvatures are defined in two cases of the bending deformation in (x–y) and (x–z) planes as presented below.

Bending deformations of an infinitesimal beam element a Bending in (x–y) plane b Bending in (x–z) plane
1.2.1.1 Curvature in (x–y) Plane Under Pure Bending
The bending deformation of an infinitesimal length of the beam (dx), in the (x–y) plane is shown in Fig. 1.1a. The applied bending moment is M z, which is vectorially directed in the positive z direction. After the deformation, the rotation angle of the infinitesimal length (dx), in the (x–y) plane is denoted by \( d\theta_{z} , \) the deformation at the center is \( \text{d}u_{y} \) and the radius of the curvature is \( \rho_{z} \). From Fig. 1.1a the length (ds) and curvature of the infinitesimal elastic curve can be stated as:
where \( \kappa_{z} \) is the curvature in the (x–y) plane, which depends on the derivative of the rotation \( \theta_{z} \) with respect to x. From the definition of the rotation \( \theta_{z} \) it is stated that,
Having introduced Eq. (1.2) into Eq. (1.1) the curvature \( \kappa_{z} \) can be obtained as written by,
This statements of the curvature \( \kappa_{z} \) will be used later to formulate differential equation of the elastic curve in the (x–y) plane.
1.2.1.2 Curvature in (x–z) Plane Under Pure Bending
As similar to the curvature in the (x–y) plane, the curvature in the (x–z) plane is obtained under the deformation of the bending moment M y , which is shown in Fig. 1.1b with positive y direction vectorially. After the deformation, the rotation angle of the infinitesimal length (dx), in the (x–z) plane is denoted by \( {\text{d}}\theta_{y} , \) the deformation at the center is \( {\text{d}}u_{z} \) and the radius of the curvature is \( \rho_{y} . \) From Fig. 1.1b the length (ds) and curvature of the infinitesimal elastic curve can be stated as:
where \( \kappa_{y} \) is the curvature in (x–z) plane, which depends on the derivative of the rotation \( \theta_{y} \) with respect to x. From the definition of the rotation \( \theta_{y} \) it is stated that,
Having introduced Eq. (1.5) into Eq. (1.4) the curvature \( \kappa_{y} \) can be obtained as written by,
This statements of the curvature \( \kappa_{y} \) will be used later to formulate differential equation of the elastic curve in the (x–z) plane. To find the differential equations of the elastic curve the equilibrium equations of a space beam element are also required. These are presented briefly in the following section.
1.2.2 Equilibrium Equations of 3D Beam Elements
The internal forces and moments of an infinitesimal element (dx) in a deformed state are as shown in Fig. 1.2 in the (x–y) and (x–z) planes. For small deformations, the horizontal and vertical components of the forces are written as:
where N is the axial force, Q y and Q z are the transverse shear forces, \( \theta_{y} \) and \( \theta_{z} \) are small rotations about y and z coordinate axes, respectively, as shown in Fig. 1.2. From the equilibriums of forces in the horizontal and vertical directions the following relations can be obtained:
where q x , q y and q z are respectively applied distributed loadings on the element in the horizontal (x) and transverse (y and z) directions as shown in Fig. 1.2. Having neglected second-order small quantities, the force–loading relations can be stated as:
From the equilibriums of moments in the (x–y) and (x–z) planes the following moment–force relations can be obtained:
Having neglected second order small quantities these relations can be simplified as written by,
The moment–force relations will be used later in the determination of differential equations of the elastic curve. So far, curvatures of Euler–Bernoulli beams and equilibrium equations are presented through Eqs. (1.1) and (1.9b). In the following section the effects (contributions) of transverse shear forces on the elastic curve are presented.

Force and moment components of an infinitesimal beam element a Projection on (x–y) plane b Projection on (x–z) plane
1.2.3 Contributions of Transverse Shear Forces on the Elastic Curve
Deformation of a beam under transverse shear forces and bending moments (Timoshenko beam) are somewhat different from the deformation under pure bending moments (Euler–Bernoulli beam). As mentioned in the introduction, in the Timoshenko beam theory, due to large shear deformations a cross-section of the beam does not remain normal to the deformed axis of the beam unlike the Euler–Bernoulli beam theory, in which the cross-section of the beam remains normal to the deformed axis. In the Timoshenko beam theory, the transverse shear deformations are also taken into account in the formulation of the differential equations of the elastic curve. As it is shown in Fig. 1.3, the total infinitesimal displacements, du y and du z , can be considered in two parts as: (a) contributions of the bending moments and (b) contributions of the transverse shear forces. From Fig. 1.3 the total infinitesimal displacements and their derivatives can be written as
in which γ y and γ z are the average transverse shear strains in the (y) and (z) coordinate directions, which can be written [44] as,
in which A y and A z are the cross-sectional areas for the shear forces in the (y) and (z) directions, respectively and G is the shear modulus of the beam material. The areas of the shear forces, A y and A z , are defined as \( \left( {A_{y} = k_{y} A} \right) \) and \( \left( {A_{z} = k_{z} A} \right) \) where A is the cross-sectional area. The coefficients k y and k z are dimensionless shear correction factors [44] that depend on the cross-sectional shape. Having introduced Eqs. (1.10a, b) into Eq. (1.9b) the differential equations of the bending moments can be obtained as written by,
or having neglected the effects of the axial force N the differential equations of the bending moments simplify as written by,
which will be used for the formulation of the differential equations of the elastic curve of the beam. In order to calculate strains at a point on a cross-section of the beam, the deformation and rotation of the point are presented in the following two sections.

Bending and shear deformations of an infinitesimal beam element a Bending and shear deformations in (x–y) plane b Bending and shear deformations in (x–z) plane
1.2.4 Deformation of a Point on a Cross-Section of 3D Beams
A point on a cross-section of a space beam element is denoted by A with the location vector {r} before deformation as shown in Fig. 1.4. The point A moves to the point \( A' \) with the location vector \( \{ r'\} \) after the deformation. The displacement of the point A, the distance of \( (A - A^{\prime}), \) is denoted by the vector {v} and the displacement vector of the coordinates of the center is denoted by {u}. The displacement vector of the point A can be stated as,
which consists of two parts as being translational and rotational deformations. The location vector, \( \{ r'\} , \) on the deformed cross-section, can be obtained from the rotational transformation of the original location vector {r} in the space. This transformation can be written as,
where [R] is the rotation matrix, which will be presented in the next section. Having introduced Eq. (1.13a) into Eq. (1.12) the deformation vector of the point A can be stated in terms of the deformation vector {u} of the central point C, at which the origin of the coordinate system is located, and the rotation of the location vector {r} of the point A. Thus, the deformation vector {v} of the location A is written as,
where I 3 is a (3 × 3) unit matrix.

Deformation of a point on a cross-section
1.2.5 Rotation Matrix of a Point on a Cross-Section of 3D Beams and Deformation for Small Rotations
The rotation matrix [R] in Eqs. (1.13a, b) is calculated from the Rodriguez rotation formula [50–53]. It is stated in the series solution as,
in which I 3 is a (3 × 3) unit matrix and \( \tilde{\Uppsi } \) denotes a skew-symmetric matrix defined as,
Here θ x , θ y , and θ z denote small angles of rotations about the local (x, y, z) coordinate axes respectively. They are the components of the rotation \( \left( {\vartheta = \sqrt {\theta_{x}^{2} + \theta_{y}^{2} + \theta_{z}^{2} } } \right) \) in the coordinate axes. The rotation matrix [R] for a finite rotation can be obtained by infinitesimal rotations successively, i.e., the rotations θ x , θ y and θ z are divided into n equal infinitesimal angles. Then, the matrix [R] can be obtained from the repetition of rotations with infinitesimal angles, i.e.,:
In the limit case, when (n) approaches infinity, the final vector {r n } will be the vector \( \{ r'\} \) and the rotation matrix [R] will be calculated from:
The series solution of [R], given by Eq. (1.14) can be proved by using the binomial theorem as stated below.
which results in the same statement as given by Eq. (1.14). If we define a rotation vector as,
then the following relation can be obtained.
Further, the skew-symmetric matrix \( \tilde{\Uppsi } \) possesses the properties:
Having introduced these properties of \( \tilde{\Uppsi } \) into Eq. (1.14) the rotation matrix [R] becomes as written by,
and having reordered Eq. (1.21a) the rotation matrix [R] will be:
Or
Since the series expansion in the brackets (.) are sin and cos functions, i.e.,:
the final statement of the rotation matrix can be written as,
Since we assume the linear beam theory, the rotations will be small. Thus, the second and higher order terms in the rotation matrix [R] are neglected, which results in the small rotation matrix as:
Having introduced Eq. (1.23) into Eq. (1.13b), the displacement vector of the location A on a cross-section of the beam shown in Fig. 1.4 can be written as:
The deformation vector {v} of the location A can now be stated explicitly as,
In Eq. (1.25a), the axial displacement v x does not include warping effect of the torsion. To complete the displacement field in the axial direction the warping contribution is also included by using the Saint–Venant torsion theory [44, 54]. This contribution is defined as \( \kappa_{x} f_{x} (y,z) \) where κ x is a twist along the beam axis (a unit axial rotation), which is assumed to be constant, and f x (y, z) is an unknown warping function of y and z coordinates, which is calculated from the solution of a stress boundary value problem. Since κ x is assumed constant, a linear rotation angle θ x is obtained, i.e., (θ x = κ x x). With the warping contribution, the axial displacement at point on a cross-section is stated:
This displacements v x from Eq. (1.25b), and v y and v z from Eq. (1.25a) will be used to calculate strains at a location on a cross-section of the beam presented in the next section.
1.2.6 Strains and Stresses at a Location on a Cross-Section of a 3D Beam
From the definition of the linear strains in the theory of elasticity [24], using Eqs. (1.25a, b), the strain components at the location A of a beam shown in Fig. 1.5 can be expressed:
In these equations, κ x is assumed as a constant twist along the beam axis (a unit axial rotation) which is obtained from the derivative of the axial rotation θ x , and the derivatives of the rotations θ z and θ y are the curvatures in the (x–y) and (x–z) planes, which are given in Eqs. (1.3) and (1.6), respectively. They are written as:
The derivative of the axial displacement of the elastic curve u x is simply the axial strain (normal strain), and the derivatives of transverse displacements of the elastic curve are given in Eq. (1.10a). They are stated:
Having used Eqs. (1.27a, b) in Eq. (1.26), the strain and stress components of the beam at the location A can be obtained as written:
in which E is the Young’s modulus (elasticity modulus) and G is the shear modulus of the beam material. The warping function f x (y, z) is determined from the solution of the boundary value problem [44, 54]:
with zero shear stresses at the boundary of the cross-section. It is seen from Eq. (1.28) that second terms in the statements of the shear strains/stresses are due to pure torsion (twisting) and they do not produce any resultant shear forces in the y and z directions, except a resultant torsional moment. This feature will be taken into account when calculating the shear forces presented in the next section.

Strains and stresses at a point of a cross-section of a beam element
1.2.7 Calculation of Forces and Moments of 3D Beams
The forces in a 3D beam are calculated from the following integrations:
in which N is the axial force, Q y and Q z are the transverse shear forces in the (x–y) and (x–z) planes, respectively. The moments are calculated from:
in which M x is the torsional moment, M z and M y are the bending moments in the (x–y) and (x–z) planes, respectively. It is assumed that local coordinates (x, y, z) are principal axes and the origin is at the gravity center of the cross-section from which the following sectional properties can be obtained:
In these statements, A y and A z are the effective areas of shear forces shown symbolically. Their calculation follows energy principles or solving stress boundary value problems [55, 56]. Here, energy principles are used to define these cross-sectional values. The shear stresses produced by the shear force Q y on the cross-section in the y and z directions are denoted by \( \left( {\tau_{y} } \right)_{y} \) and \( \left( {\tau_{z} } \right)_{y} , \) and those produced by Qz are denoted by \( \left( {\tau_{y} } \right)_{z} \) and \( \left( {\tau_{z} } \right)_{z} \) as defined:
in which ψ y and ψ z are potentials of shear stress distributions due to Q y and Q z , respectively. Using energy equivalences the shear areas A y and A z are obtained from:
As mentioned above the shear stresses produced by a pure torsional (twisting) moment do not produce resultant shear forces. Thus,
Using the cross-sectional properties in Eq. (1.31a) and the conditions in Eq. (1.31d) the forces can be stated as:
and the moments are:
where GJ is the torsional rigidity of the beam and I p = (I y + I z ) is the polar inertia moment and J is the torsional constant of the cross-section. Equations (1.32a, b) will be used in the formulation of the elastic curve and calculation of the strain energy of the beam.
1.2.8 Differential Equations of the 3D Beam Element
For a zero loading case, the derivatives of the normal force (N) and torsional moment (M x ) are equal to zero, i.e.,:
Using N and M x from Eqs. (1.32a, b) in Eq. (1.22a) it can be written as,
Having introduced \( \varepsilon_{x} \) and \( \kappa_{x} \) from Eqs. (1.27b, a) into Eq. (1.33b) the differential equations of the axial displacement and torsional rotation can be obtained as written:
In order to find the differential equations of the elastic curve in the (x–y) and (x–z) planes (transverse displacements and rotations) of a Timoshenko beam, Eqs. (1.11b), (1.10b) and (1.10a) will be used. It is stated as:
The differential equations can be stated in two alternative forms as:
-
In the first alternative, the curvatures \( \kappa_{z} \) and \( \kappa_{y} \) defined in terms of second derivatives of displacements in Eqs. (1.3) and (1.6) are used in Eq. (1.32b), and then using Eq. (1.34) the differential equations of the elastic curve can be obtained in terms of displacements as stated by,
-
In the second alternative, the moment–curvature relations given in Eq. (1.32b) are used in Eq. (1.34), and the differential equations of the elastic curve can be obtained in terms of rotations as written by,
One of these differential equations can be used to find the elastic curve of the spatial beam element. The solutions of the differential equations are presented in the next section for both alternatives.
1.2.9 Solution of Differential Equations of the Elastic Curve and Shape Functions of the 3D Beam Element
The solutions of the differential equations of the axial displacement and torsional rotation are obtained directly from Eq. (1.33c). They are obtained to be linear functions of the axial coordinate (x) as stated by,
From the solutions of differential equations given in Eqs. (1.35) and (1.36), the transverse displacements and rotations of the elastic curve can be obtained respectively to be cubic and quadratic functions of the axial coordinate (x) as explained below for two cases:
-
In the first alternative, the differential equations given in Eq. (1.35) are used. The displacements are chosen to be cubic functions of (x) as written by:
$$ \begin{aligned} u_{y} & = C_{0} + C_{1} x + C_{2} x^{2} \,\, + C_{3} x^{3} \\ u_{z} & = C_{4} + C_{5} x + C_{6} x^{2} \,\, + C_{7} x^{3} \\ \end{aligned} $$(1.38)Using Eqs. (1.35) and (1.38) the rotations θ y and θ z are obtained as stated by,
$$ \begin{aligned} \theta_{y} & = - C_{5} - 2C_{6} x\, - \left( {\frac{{6{\text{EI}}_{y} }}{{{\text{GA}}_{z} }} + 3x^{2} } \right)C_{7} \\ \theta_{z} & = C_{1} + 2C_{2} x\,\, + \left( {\frac{{6{\text{EI}}_{z} }}{{{\text{GA}}_{y} }} + 3x^{2} } \right)C_{3} \\ \end{aligned} $$(1.39) -
In the second alternative, the differential equations given in Eq. (1.36) are used. The rotations θ y and θ z are chosen to be quadratic functions of (x) as stated by,
$$ \begin{aligned} \theta_{y} & = B_{5} + B_{6} x + B_{7} x^{2} \\ \theta_{z} & = B_{1} + B_{2} x + B_{3} x^{2} \\ \end{aligned} $$(1.40)Using Eqs. (1.36) and (1.40) the displacements u y and u z are obtained as stated by,
$$ \begin{aligned} u_{y} & = B_{0} + B_{1} x + \frac{1}{2}B_{2} x^{2} + \left( {\frac{1}{3}x^{3} - \frac{{2{\text{EI}}_{z} }}{{{\text{GA}}_{y} }}x} \right)B_{3} \\ u_{z} & = B_{4} - B_{5} x - \frac{1}{2}B_{6} x^{2} - \left( {\frac{1}{3}x^{3} - \frac{{2{\text{EI}}_{y} }}{{{\text{GA}}_{z} }}x} \right)B_{7} \\ \end{aligned} $$(1.41)
The constants, A i (i = 0–3) in Eq. (1.37), C i (i = 0–7) in Eqs. (1.38) and (1.39), and B i (i = 0–7) in Eqs. (1.40) and (1.41) are calculated by using the kinematic boundary conditions at the member ends (1) and (2), i.e., for \( \, (x = 0), \) and \( (x = \ell ). \) These conditions are imposed as:
where \( \ell \) denotes the length of the beam element and the definitions of displacements and rotations at the member ends (1) and (2) are shown in Fig. 1.6. By using these boundary conditions the constants are obtained as given below.

A spatial beam element with nodal displacements and rotations
For the constants, A i (i = 0–3):
For the constants, C i (i = 0–7):
For the constants, B i (i = 0–7):
In these constants, the parameters (Φ y , μ y ) and (Φ z , μ z ) are the transverse shear force parameters, which are defined as,
If the effect of transverse shear forces on the elastic curve is not considered, then the parameters Φ y and Φ z will be zero. This special case produces formulations of the Euler–Bernoulli beam theory. Since the Timoshenko beam theory is more general than the Euler–Bernoulli beam theory, it is preferably used in the analysis of frame structures as, in the limit case, it is equivalent to the Euler–Bernoulli beam theory. It can be verified from Eq. (1.46) as \( \left( {\ell \to \infty } \right) \) the parameters Φ y and Φ z approach zero. The shape functions of a 3D beam element can be obtained by introducing the constants of displacements and rotations into their corresponding functions, i.e., A i (i = 0–3) into Eq. (1.43), C i (i = 0–7) into Eqs. (1.44a, b), or B i (i = 0–7) into Eqs. (1.45a, b). The solutions of the differential equations, which are given by Eqs. (1.38) and (1.39), and Eqs. (1.41) and (1.40), produce the same shape functions for transverse displacements and rotations. Having used the dimensionless variable:
the functions of displacements and rotations can be stated in terms of their nodal values as written by,
where the definitions of the vectors {u}, {θ} are:
and {d} is the vector of nodal values of the displacements and rotations defined as,
where {.}T denotes the transpose of a vector. The matrices, [N u ] and [N θ ], are the shape functions matrices for displacements and rotations, respectively, which are obtained as written below in Eqs. (1.50a, b).
and
where [.]T denotes a matrix transposition. By using Eqs. (1.27a–1.28) the strains at the center of principal coordinates and the curvatures of the beam can be obtained in terms of nodal displacements and rotations as stated in vector notation by,
in which {δ} is the deformation vector and [B] is a matrix of functions that obtained as written by,
The aforementioned statements will be used to calculate the total potential energy and stiffness matrix of a Timoshenko beam element presented in the next section.
1.2.10 Total Potential Energy, Stiffness Matrix, and Static Equilibrium Equation
The total potential energy of a beam is stated as,
where U is the total strain energy and Wp is the total work done by all external loads. Since the total potential energy is stationary its variation will be zero, i.e.,:
The total strain energy is calculated from the integration:
where {ε} and {σ} are the vectors of strains and stresses at a point on the cross-section of a beam element, which are given by Eqs. (1.28) and (1.29), respectively. These vectors are defined as:
Having introduced Eq. (1.55) into Eq. (1.54), the total strain energy can be written:
Having carried out integrations in Eq. (1.56), and using section properties in Eq. (1.31a) and the conditions in Eq. (1.31d), the total strain energy can be obtained as:
Using Eqs. (1.32a, b) in Eq. (1.57), the total strain energy can be written alternatively in terms of member forces and moments as:
In vector notations, it can be written,
In Eq. (1.59), \( \left\{ \delta \right\} \) is the deformation vector given in Eq. (1.51a), {F} is the force vector defied as,
and [G] is the rigidity matrix defined as,
Having introduced the deformation vector \( \left\{ \delta \right\} \) from Eq. (1.51a) into Eq. (1.59) the total strain energy of the beam can be stated as written by,
where [k] is the stiffness matrix of the beam element in local coordinates defined as:
The total work done by external distributed and concentrated loads as well as member-end forces, which are all specified in the direction of displacements and rotations, can be written as,
in which {q} and {m} are respectively distributed load and moment vectors, {u} and {θ} are displacements and rotation vectors given in Eq. (1.48b), \( \{ {\text{P}}_{{\,{\text{i}}}} \} \) and \( \{ {\text{M}}_{\text{j}} \} \) are concentrated load and moment vectors at the location j of the element, \( \left\{ {u\left( {\xi_{i} } \right)} \right\} \) and \( \left\{ {\theta \left( {\xi_{j} } \right)} \right\} \) are the displacement and rotation vectors at the location j, and \( \left\{ f \right\} \) is the vector of internal forces and moments at the element ends (1) and (2). These applied loads and moments are shown in Fig. 1.7. Having introduced the displacements and rotations, {u} and {θ}, from Eq. (1.48b) into Eq. (1.64), the total work of external loads and member-end forces can be expressed as:
or using an equivalent load vector of the element, the total work can be simplified as written by,
The equivalent, or in other words the consistent, load vector is simply defined from Eq. (1.65a) as written by,
With these definitions of the total strain energy and external work, the variation of the total potential energy given by Eq. (1.53) is stated as:
Since \( \delta \left\{ d \right\} \) is arbitrary, the stiffness equation of the beam element under static loads can be obtained from Eq. (1.67) in local coordinates as:
From this equation it is seen that, when the member-end displacements and rotations are zero, the internal force vector will only be dependent on the applied forces and moments. This case of the internal forces and moments is known as the fixed-end member forces and moments. They are defined from Eq. (1.68) in the vector notation as:
so that with member fixed-end forces, the stiffness equilibrium equation of the element can be written as:
In Eq. (1.70), the first term on the right hand side is the contribution of the stiffness forces (forces due to member-end displacements) and the second term is contribution of the applied external loads. The stiffness matrix, [k], is calculated by using Eq. (1.63) and the consistent load vector is calculated from Eq. (1.66). Equation (1.68) or (1.70) states the equilibrium condition of the element. In a similar way, we can also write the equilibrium condition of a joint (a connection point of different elements) in the system, e.g., like the one shown in Fig. 1.7. This is achieved by superimposing member-end forces of all elements connected at the joint and applied loads, which are all stated in global coordinates, and then equalizing them to zero. This superposition is indicated symbolically by the summation of all member-end forces in global coordinates as written by,
where (n e) indicates total number of elements joining at the joint (j), the subscript (G) denotes global coordinates, and {Q Gj } is the external load vector applied at the joint (j) in the global coordinates. To obtain an equilibrium condition of the system (equilibriums of all joints in the system), an assembly process of the element stiffness matrix and consistent load vector as written symbolically in Eq. (1.71) is carried out. For this assembly process, the stiffness matrices and consistent load vectors in local coordinates of elements must be transformed first to the global coordinates, and then the assemblage is processed. The coordinate transformation process will be explained later in the Sect. 1.2.12. After the assemblage, the equilibrium equation of the system under static loadings can be stated as:
where [K] is the system stiffness matrix and {P} is the system load vector, which are all in global coordinate directions. The vector {D} is the system displacement vector in the global coordinates, which is calculated from the solution of Eq. (1.72). In order to form the stiffness matrix and load vector of the system, the element stiffness matrix and load vector in the local coordinates must be calculated first as presented below.

Distributed and concentrated applied loads and member-end forces of a beam element
1.2.10.1 Element Stiffness Matrix in Local Coordinates
The stiffness matrix of an element will be calculated in the local principal coordinates by using Eq. (1.63), in which the rigidity matrix [G] and the deformation matrix [B] are defined respectively by Eqs. (1.61) and (1.51b). Having carried out the integration of Eq. (1.63), the stiffness matrix can be obtained in the local principal coordinates as written by,
where the submatrices are as defined below.
where the parameters, μ y and μ z , are given in Eq. (1.46).
1.2.10.2 Element Consistent Load Vector in Local Coordinates
The consistent load vector of an element will be calculated in the local principal coordinates by using Eq. (1.66), which can be expressed as:
where \( \left\{ {p_{q} } \right\} \) is the contribution of the distributed loads, \( \left\{ {p_{p} } \right\}_{i} \) is the contribution of the concentrated forces and \( \left\{ {p_{m} } \right\}_{j} \) is the contribution of concentrated moments. For fully distributed constant loads and moments, {q} and {m}, and for concentrated forces {P i }, these contributions \( \left\{ {p_{q} } \right\} \) and \( \left\{ {p_{p} } \right\}_{i} \) can be obtained as written by,
and
The contribution of concentrated moments \( \left\{ {{\text{M}}_{\text{j}} } \right\} \) to the consistent load vector, \( \left\{ {p_{m} } \right\}_{j} , \) is obtained as written by,
For other types of loadings, the consistent load vector can be calculated by using Eq. (1.74). For a dynamic analysis, the mass and damping matrices of the element are also required. These quantities and the dynamic equilibrium equation of a structural system are presented in the following section.
1.2.11 Total Kinetic Energy, Mass Matrix, Damping Matrix, and Dynamic Equilibrium Equation
When the applied loads are time dependent, such as earthquake and wave loadings, the static equilibrium equation given by Eq. (1.72) is not valid any more. In this case, the dynamic equilibrium equation will be used to calculate response displacements and element internal forces as being time functions. The dynamic equilibrium equation of an element can be obtained by using the fundamental form of the Lagrange’s equation [57–59], which is stated in terms of the generalized coordinates (here, the displacements) as written in the matrix form by,
in which d i is the ith term of the displacement vector, T is the total kinetic energy of the element, U is the strain energy given by Eq. (1.62), W p is the total work done by all external loads, which is given by Eq. (1.65b) in the static case, D is the dissipation energy in the element due to internal friction, in other words due to structural damping, and a dot means a time derivative. Since U and W p are previously determined, attention is paid here on the kinetic and dissipation energies, T and D.
The total kinetic energy of a beam is obtained from the integration of the kinetic energy of an infinitesimal volume in the element, dV. It is stated as,
in which ρ s is the mass density of the structural material and v is the velocity of the mass of the infinitesimal volume dV. Its square is written as:
where \( \dot{v}_{x} ,\,\dot{v}_{y} \) and \( \dot{v}_{z} \) are the velocity components at a point on the cross-section of the beam in the coordinate directions, x, y, and z, respectively. Having neglected the warping effect and using Eq. (1.25a) in Eq. (1.78a) the velocity square can be obtained as written:
Having introduced Eq. (1.78b) into Eq. (1.77) and using the cross-sectional properties given by Eq. (1.31a), the total kinetic energy in the local principal coordinates can be obtained as:
where I p is the polar inertia moment. Using Eqs. (1.48a, b) in Eq. (1.79), the kinetic energy can be expressed in the matrix form as:
or
in which [m] is the consistent mass matrix of the element in the local principal coordinates. It is defined as:
The dissipation energy is the work done by viscous forces due to internal friction in the element, and it can be stated in a similar form of the kinetic energy [60] as:
where [c] is the damping matrix of the element, which can be obtained as being proportional to the mass matrix and the stiffness matrix for a linear viscous damping. It is also referred to as the Rayleigh damping. In general, it is stated [61] as:
where α and β are the proportionality factors. Having substituted the strain energy U from Eq. (1.62), the kinetic energy T from Eq. (1.80b), the dissipation energy D from Eq. (1.82), and the external work W p from Eq. (1.65b) into the Lagrange’s equation in Eq. (1.76), the dynamic equilibrium equation of the beam element can be obtained as,
where {f(t)} is the vector of time dependent internal forces at the element ends, {p(t)} is the vector of time dependent distributed loads on the element. Similar to the static analysis, the dynamic equilibrium of a joint (j) in a structural system can be stated in the global coordinates as:
in which the subscript (G) denotes global coordinates, {Q Gj (t)} is the vector of time dependent applied loads at the joint in the global coordinates. For all joints of a structural system, this equation can be stated similarly to the static analysis in the global coordinates as written:
which defines the dynamic equilibrium equation of the system. In Eq. (1.86), [M] is the mass matrix of the system obtained from the assembly process of element mass matrices and [C] is the Rayleigh damping matrix of the system. The mass matrix of an element is calculated in two manners as presented in the next sections.
1.2.11.1 Consistent Mass Matrix in Local Coordinates
The consistent mass matrix will be calculated in the local principal coordinates by using Eq. (1.81), in which the shape functions matrices, [N u ] and [N θ ], are as given by Eqs. (1.50a, b), and the matrix [J] is given in Eq. (1.80a). Having carried out the integration of Eq. (1.81), the consistent mass matrix can be stated as:
where the submatrices are defined as:
The elements of the mass matrix (m ij ) are obtained as presented:
The parameters, Φ y , μ y , and Φ z , μ z , are given in Eq. (1.46). This consistent mass matrix will be transformed to the global coordinates and then assembly process will be performed to obtain the system mass matrix. An alternative choice of using mass matrix is the lumped mass matrix as it is explained in the next section.
1.2.11.2 Lumped Mass Matrix in Local Coordinates
The consistent mass matrix presented above is the general formulation of the mass matrix of an element in the local principal coordinates, which produces more accurate results. Since it is a symmetric full matrix, in practical applications, using the consistent mass matrix is relatively costly in terms of computation time. An alternative choice may be to use a diagonal (lumped) mass matrix, which offers computational and storage advantages in certain cases, notably in explicit time integration, within acceptable precision bounds of the results for dynamic sensitive structures. The construction of the consistent mass matrix is fully defined by the choice of kinetic energy functional and shape functions, whereas the construction of a diagonally lumped mass matrix is not a unique process. Once the consistent mass matrix is calculated, the lumped mass matrix can be formed in different ways. One of the following methods can be widely used in the practice:
-
1.
The lumped mass matrix can be obtained by using a rigid body motion in a selected coordinate direction, i.e., in one of u x , u y , u z , θ x , θ y , and θ z directions at a time.
-
2.
The HRZ lumping [62]. The lumped mass matrix can be obtained by a heuristic procedure as it follows.
-
For each coordinate direction, select the degrees of freedom (DOF) that contribute to motion in that direction. From this set, separate translational DOF and rotational DOF subsets.
-
Add up diagonal entries of the consistent mass matrix pertaining to the translational DOF subset only. This summation is denoted by S.
-
Find the terms of the lumped mass matrix of both subsets by dividing the diagonal entries of the consistent mass matrix by the sum S.
-
Repeat this process for all coordinate directions.
-
These two methods of mass lumping have three advantages: (a) easy to explain and implement, (b) applicable to any element as long as the consistent mass matrix is available and (c) retaining non-negativity. The last property is particularly important as it means that the lumped mass matrix is physically admissible, preventing numerical instability. As a general assessment, it gives reasonable results if the element has only translational freedoms. The lumped mass matrices, which are obtained from the consistent mass matrix using above methods, are presented in the local principal coordinates in Eqs. (1.90a, b) with and without including shear deformation effects. In these equations, the nonzero diagonal terms of the lumped mass matrix are shown in vector notations. As it is seen from Eqs. (1.90a, b), both methods produce the same results in the translational directions and satisfy the mass conservation of the element as the total mass is equally concentrated at both ends of the element. In the rotational degrees of freedom, there is no unique lumped mass. However, in the light of comparatively small contributions of rotational degrees of freedom to the total kinetic energy, lumped masses at rotational directions can also be taken as being zero with an acceptable precision of the results. However, in this case, the lumped mass matrix becomes singular and therefore it produces numerical difficulties. In order to prevent such difficulties, the lumped masses in rotational DOF can be assumed a small quantity in practice, e.g., \( \left( {m_{\text{rot}} = m\ell^{2} /\alpha } \right) \) with α is an assumed large number.
With shear deformation:
Without shear deformation:
The lumped mass matrix produces accurate results for small natural frequencies. For higher natural frequencies, it produces approximate results, and for more correct results, the consistent mass matrix should be used.
1.2.12 Coordinate Systems and Transformations
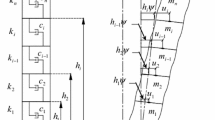
For a spatial beam element, three coordinate systems are involved as: (a) global coordinate system, (X, Y, Z), (b) local principal coordinate system (X L, Y L, ZL), and (c) local auxiliary coordinate system \( \left( {X^{\prime}_{\text{L}} ,Y^{\prime}_{\text{L}} ,Z^{\prime}_{\text{L}} } \right), \) as shown in Fig. 1.8. The stiffness, load, mass, and cross-sectional properties of the element are formulated in the local principal coordinate system (X L, Y L, Z L) as presented above. In order to form the stiffness and mass matrices, and the load vector, of the system using the assembly process, the element stiffness and mass matrices, and the load vector, must be transformed to the global coordinate system (X, Y, Z). This transformation can be done by using a local auxiliary coordinate system \( \left( {X^{\prime}_{\text{L}} ,Y^{\prime}_{\text{L}} ,Z^{\prime}_{\text{L}} } \right). \) As it is shown in Fig. 1.8, the coordinates, X L and \( X^{\prime}_{\text{L}} , \) of the principal and auxiliary coordinate systems are assumed in the axial direction of the element. The other axes \( \left( {Y^{\prime}_{\text{L}} ,Z^{\prime}_{\text{L}} } \right) \) of the auxiliary coordinate systems are obtained by rotating the principal coordinate axes (Y L, Z L) about the axial coordinate X L until the axis Z L becomes parallel to the (X–Z) plane of the global coordinate system. This position of the rotation of (Y L, Z L) is assumed to be the auxiliary coordinates \( \left( {Y^{\prime}_{\text{L}} ,Z^{\prime}_{\text{L}} } \right). \) Thus, the condition of the auxiliary coordinate system is \( \left( {Z^{\prime}_{\text{L}} //\left( {X - Z} \right)\;{\text{plane}}} \right). \) The rotation angle satisfying this condition is denoted by β as shown in Fig. 1.8. The clockwise rotation of (Y L, Z L) is assumed to have a (+) sign, which produces a vector in the (+) axial coordinate direction, X L. For further development, the following definitions are made:
- {u}:
-
Displacement vector in the local principal coordinate system (X L, Y L, Z L), given in Eq. (1.48b)
- \( \{ u^{\prime}\} \) :
-
Displacement vector in the local auxiliary coordinate system \( \left( {X^{\prime}_{\text{L}} ,Y^{\prime}_{\text{L}} ,Z^{\prime}_{\text{L}} } \right) \)
- \( \{ u_{G} \} \) :
-
Displacement vector in the global coordinate system (X, Y, Z)
The displacement vectors in these coordinate systems are calculated from the following transformation:

Element coordinate systems, a global (X, Y, Z), b local principal (X L, Y L, Z L), and c local auxiliary (X′L, Y′L, Z′L)
The transformation matrices are defined as:
- [t 1]:
-
Transformation matrix between the local principal and auxiliary coordinate systems, (X L, Y L, Z L) and \( \left( {X^{\prime}_{\text{L}} ,Y^{\prime}_{\text{L}} ,Z^{\prime}_{\text{L}} } \right). \)
- [t2]:
-
Transformation matrix between the auxiliary and global coordinate systems, \( \left( {X_{L}^{'} ,Y_{L}^{'} ,Z_{L}^{'} } \right) \) and (X, Y, Z)
- [t]:
-
Transformation matrix between the local principal and global coordinate systems, (X L, Y L, Z L) and (X, Y, Z).
The transformation matrix between the local principal and auxiliary coordinate systems, [t 1], can be easily written from Fig. 1.8 in terms of the rotation angle β as:
The transformation matrix between the local auxiliary and global coordinate systems, [t 2], can be defined in general as:
where the parameters are:
The element orientation in the global coordinate system, which is defined by the cosine directions (c x , c y , c z ), is given. The cosine directions of the axes \( Y^{\prime}_{\text{L}} \) and \( Z^{\prime}_{\text{L}} ,\left( {\ell_{x} ,\ell_{y} ,\ell_{z} } \right) \) and (m x, m y, m z), will be calculated in terms of (c x , c y , c z ) using normality and orthogonality properties of orthogonal transformations, and also the condition that \( \left( {Z^{\prime}_{\text{L}} //\left( {X - Z} \right)\;{\text{plane}}} \right). \) The normality and orthogonality properties are satisfied by the condition:
The condition \( \left( {Z^{\prime}_{\text{L}} //\left( {X - Z} \right)\;{\text{plane}}} \right) \) implies that (m y = 0). Using these conditions the unknowns \( \left( {\ell_{x} ,\ell_{y} ,\ell_{z} } \right)\, \) and (m x, m y, m z) can be obtained as written:
With these cosine directions the transformation matrix [t 2] given by Eq. (1.93) can be written as:
or using the property of cosine directions that \( \left( {c_{x}^{2} + c_{y}^{2} + c_{z}^{2} = 1} \right) \) Eq. (1.96a) can be stated as:
This matrix covers all positions of element orientations, except in the global Y direction. For the orientation in the global Y direction, i.e.,\( \left( {c_{y} = \pm 1} \right) \) and \( \left( {c_{x} = 0,\,\,c_{z} = 0} \right), \) the parameter \( \lambda \) in Eq. (1.96b) becomes indefinite, which introduces a numerical instability. In order to prevent this problem, a special treatment is required. This can be done in different ways. In the first way, it is assumed that c z is approaching, or equal to, zero as shown in Fig. 1.9a. In the second way, it is assumed that c x is approaching, or equal to, zero as shown in Fig. 1.9b. A third way may be diagonal approach, for which \( \left( {\lambda = 1} \right) \) is assumed in Eq. (1.96b). However, this option is not considered here. Instead, the first two ways can be applied since they are relatively simpler. In this case, Eq. (1.96b) becomes as written:
For the critical element orientation \( \left( {c_{y} = \pm 1} \right) \) as shown in Fig. 1.10, if the first way is used, c x will be zero (c x = 0) in the matrix \( [t_{2} ]_{{c_{z} \to 0}} \) and, if the second way is used, c z will be zero (c z = 0) in the matrix \( [t_{2} ]_{{c_{x} \to 0}} , \) which are both written in Eq. (1.97a). The transformation matrices for these two ways for (c y = ±1) are stated as
The solutions of both ways are correct and one of them must be adopted. We adopt the first way, i.e., \( [t_{2} ]_{{c_{z} \to 0}} \) leading to the transformation matrices for positive and negative orientations of the element as written by,
Having determined the transformation matrices, [t 1] and [t 2], the transformation matrix [t] between the local principal and global coordinates will be calculated using Eq. (1.91). It is stated for the general case and for the special case of \( \left( {c_{y} = \pm 1} \right) \) as written:
As similar to the coordinate transformations the transformation of displacements and rotations can now be constructed as written by,
where {d} and {d G} are respectively displacement vectors in the local principal and global coordinate systems. The transformation matrix [T] is used to calculate element properties in the global coordinates as explained in the following section.

Special cases of the element orientation, (c z = 0) and (c x = 0). a The case of c z = 0. b The case of c x = 0

Element orientations in the global Y direction. a Positive orientation c y = +1. b Negative orientation c y = −1
1.2.13 Transformations of Element Stiffness Matrix, Consistent Load Vector, and Mass Matrix
The element stiffness matrix given by Eq. (1.73a), consistent load vector given by Eq. (1.74), and mass matrix given by Eq. (1.87) are defined and calculated in the element local principal coordinates. For the equilibrium of the system, all elements must be transformed to a common coordinate system, which is known as the global coordinate system. The transformations from element local to the global coordinates systems are carried out using the energy conservations, i.e., the total strain energy, the total work of external forces, and the total kinetic energy are invariant. These quantities are defined in the local principal coordinates by Eq. (1.62) for the strain energy, Eq. (1.65b) for the external work and Eq. (1.80b) for the kinetic energy. They are equalized to values stated in the global coordinates as written by:
Having substituted {d} from Eq. (1.99) to these statements they can be obtained as written:
From these statements of energy equivalences the stiffness matrix, mass matrix, consistent load vector, and internal force vector can be expressed in the global coordinates as:
in which the transformation matrix [T] is given in Eq. (1.99). Since [T] contains only diagonal submatrices with (3 × 3) dimensions, the transformations can be carried out easily.
1.3 Formulation of Member Releases and Partly Connected Members
The materials through pages (43–62) in Sect. 1.3 are taken partly from OMAE-2010 [73] and the publisher ASME is greatly acknowledged for granting permission.
In structural analysis, it is mostly assumed or constructed that structural elements are rigidly connected to each other at joints, such as in the case of reinforced concrete frames. Under cyclic or ultimate loadings, allowable damages and deteriorations of elements at some joints can happen due to some stress concentrations. Such occurrences result in unsatisfactory response performances of the structural system since functionalities of the damaged elements are reduced considerably as depending on the degree of the damage rate. For a correct analysis, the damaged elements should be modeled to allow the damages in the element formulation. Steel structures are largely used in offshore structural industry because of their topological varieties, constructional and building flexibilities, well-known material properties, easy reparability, etc. These structures consist of a large number of tubular elements with various dimensions (diagonals and legs), which are joined to each other by welding that makes connections to be rigid. Diagonal members (braces) have relatively small dimensions and legs or chords have larger dimensions in general. Although the connections at joints are made by weld, the actual joint behavior under dynamic loadings, such as wave and earthquake loadings, is not fully rigid in the vicinity of connections due to local deformations of elements having large diameters [63, 64], or due to fatigue damages in the long term and also due to plastic deformations under ultimate loadings in the short term, which are schematically shown in Fig. 1.11. The phenomenon of the deterioration of elements can be taken into account in the analysis by using a computational model that allows flexibility at joints. It is assumed here that all deteriorations of an element are represented by massless spring systems, which allow flexibilities at the element ends. This subject has been studied by several investigators, see e.g., [65–71]. Most of these works deal with investigation of local flexibility of tubular members rather than addressing a full structural analysis procedure taking into account joint flexibilities. A fictitious element at the deteriorated joint [70] can be used to solve this problem, which considers local flexibilities in the system. This fictitious element may be derived as depending on actual member dimensions and joint configurations. However, the technique of using fictitious members introduces additional degrees of freedom that are not desirable in the analysis. A procedure which uses modified stiffness and mass matrices for flexibly connected elements is more practical and attractive [72, 73] since:

Examples of deteriorations of an element at a joint. a An original joint. b Local deformation. c Plastic deformation. d Cracked deformation
-
1.
no additional degrees of freedom are introduced,
-
2.
element-release and fixed-connection conditions can be directly obtained,
-
3.
a general element-end condition in any direction can be easily specified,
-
4.
a failure mechanism can be easily determined,
-
5.
in a reliability analysis, the influence of local flexibilities can be easily considered,
-
6.
in the fatigue damage calculation the load carrying capacity of the element can be used until the whole cross-section of the element is damaged,
-
7.
natural frequencies and mode shapes of damaged structural system can be estimated in terms of the natural frequencies and mode shapes of the undamaged structural system.
In this chapter, formulations of stiffness and mass matrices and consistent load vector of partly connected members, which are taken from [73], are presented. Parameters of the local flexibilities can be determined experimentally or analytically using a detailed FE analysis of related joints. It is assumed that member connectivity conditions are known or determined a priori.
1.3.1 Representation of a Partly Connected Beam Element
As it is mentioned in the previous section, all deteriorations in an element are represented by massless spring systems, and therefore they do not carry inertia forces, at the element ends as shown in Fig. 1.12. These spring systems are denoted by [r i ] and [r j ] at the element ends (i) and (j), which are assumed to be uncoupled, i.e., they include only diagonal terms and known a priori. The stiffness matrix [k], mass matrix [m] and the consistent load vector {p} of the element (i–j) are known as explained in previous sections. In the local principal coordinates, the joint displacement vectors are respectively {d i } and {d j } at joints (i) and (j), \( \left\{ {d^{\prime}_{i} } \right\} \) and \( \left\{ {d^{\prime}_{j} } \right\} \) at joints \( \left( {i^{\prime}} \right) \) and \( \left( {j^{\prime}} \right) \) as shown in Fig. 1.12. Our purpose here is to find the stiffness matrix, consistent load vector, and mass matrix of the spring-beam element (i′–j′) in the local principal coordinates, representing a deteriorated element in a structural system. As it is indicated in Fig. 1.12, the joints \( \left( {i^{\prime}} \right) \) and \( \left( {j^{\prime}} \right) \) are the nodal joints in the system, and the joints (i) and (j) are the internal joints of the element. The internal joints of the element will be eliminated from the system equilibrium equations. Relative displacement vectors of the spring systems at both ends of the structural element (i–j) are also defined as being {x i } and {x j } in the local principal coordinates, which are:
For the whole spring-beam element the displacement vectors are:
Under a zero external loading condition, a relation between the displacement vectors, \( \{ d^{\prime}\} \) and \( \{ d\} , \) will be constructed. For this purpose, equilibrium equations at the internal joints, (i) and (j), are used. From Fig. 1.13 it can be written that,
The total equilibrium equation of the spring-beam element can be stated as:
where I 12 is a unit matrix with the dimension of (12 × 12), and \( [.]^{ - 1} \) denotes the inverse of a matrix. The transformation matrix between displacement vectors, \( \{ d^{\prime}\} \) and \( \{ d\} , \) can readily be written from Eq. (1.106) as:
which will be used in the formulation of the spring-beam element explained in the next section.

Representation of a partly connected element in a structural system

Forces at internal joints of a spring-beam element under zero external loadings
1.3.2 Formulation of Stiffness Matrix, Consistent Load Vector, and Mass Matrix of a Spring-Beam Element
Formulation of the stiffness matrix of a spring-beam element can be done in two different ways: (a) using equivalent forces of the spring-beam element at the joints \( \left( {i^{\prime}} \right) \) and \( \left( {j^{\prime}} \right), \) (b) using variation of the total potential energy. These two formulation ways are explained below.
-
1.
In the first alternative, the stiffness matrix of the spring-beam element is formulated by using equivalent forces at the element ends, \( \left( {i^{\prime}} \right) \) and \( \left( {j^{\prime}} \right), \) i.e., at the element ends the spring and stiffness forces must be equal. Thus,
Having used the relative displacement vector {x} from Eq. (1.105) and the displacement vector {d} from Eq. (1.107) in Eq. (1.108a) the following relation can be obtained:
from which the stiffness matrix of a spring-beam element can be readily written as:
The consistent load vector is formulated using equivalent external works done by loads on the beam element (i–j) and the consistent load vector of the spring-beam element (i′–j′). Thus,
-
2.
In the second alternative, the stiffness matrix and consistent load vector of the spring-beam element can be formulated by using variation of the total potential energy. The total potential energy of the spring-beam element contains the strain energy, the energy stored in the spring system, and the work of external loads. It is expressed as:
Having used {d} from Eq. (1.107) and {x} from Eq. (1.105) in Eq. (1.111) the total potential energy becomes as:
or
Since the total potential energy is stationary, its variation will be zero, i.e., (δΠ = 0) which leads to:
from which the stiffness matrix \( [k^{\prime}], \) the consistent load vector \( \{ p^{\prime}\} \) and the vector of member internal forces \( \left\{ {f^{\prime}} \right\} \) can be stated as:
Since [r] is a diagonal matrix, the stiffness matrix \( [k^{\prime}] \) will be symmetric. From the multiplication of \( [k^{\prime}] \) by \( [T]^{ - 1} \) from the right hand side it is obtained that,
and using \( [T]^{ - 1} \) from Eq. (1.109) in Eq. (1.115a) it is obtained that,
which is the same as that given in Eq. (1.109).
The mass matrix of the spring-beam element is obtained from the total kinetic energy as similar to the stiffness matrix. Since the spring system is assumed to be massless, the total kinetic energy of the spring-beam element will be equal to that of the beam element given by Eq. (1.80b). Thus, using Eqs. (1.80b) and (1.107) the mass matrix of the spring-beam element can be obtained as written:
If the spring matrix [r] is known, the transformation, or connectivity, matrix [T] is calculated from Eq. (1.107). If, however, the connectivity matrix [T] is provided directly rather than providing the spring matrix [r], an equivalent spring matrix can also be calculated from Eq. (1.107). A unit value in a diagonal term of [T], i.e., \( \left( {r_{i} = \infty } \right), \) means that a rigid connection is made in this direction while a zero value, i.e., \( \left( {r_{i} = 0} \right), \) indicates that a free connection is made, which produces zero member-end force accordingly.
The formulation of the spring-beam element can be summarized as follows:
In these formulations, the same coordinate system for springs and the structural element must be maintained. If different coordinate systems are used, i.e., if the spring matrix is defined in a different coordinate system from the member coordinates, then they must be transformed to the same coordinates before the aforementioned transformations are carried out. The calculation procedure is demonstrated by an example in the following section.
1.3.2.1 Spring-Beam Element Idealization of a Bar Structural System
As a demonstration of the spring-beam element, a simple bar structural system shown in Fig. 1.14, is analyzed. The system allows only axial deformation. It is assumed that joints 1 and 7 are fixed, i.e., displacements at these joints are zero. Displacements at joints (2–6) will be calculated under a point (concentrated) load applied at the joint 3 as shown in Fig. 1.14. There are two approaches for the solution, (a) using standard FE idealization, (b) using spring-beam element idealization, which are both presented below.

An example of a simple bar structural system, a standard FE idealization, b spring-beam element idealization
1.3.2.1.1 Standard FE Idealization
In this solution, all spring and solid elements are taken as being parts of the standard FE idealization with unknown displacements at the joints (2–6) as shown in Fig. 1.14a. For this simple system, the stiffness matrix of a spring element, [r], and the stiffness matrix of a solid element, [k], are expressed as,
Using the boundary conditions, i.e., (d 1 = 0) and (d 7 = 0), the system equation can be obtained as written by,
From the solution of this equation the unknown displacements can be obtained in terms of the stiffness and spring constants as written by,
In these statements, all special cases of the spring systems can be produced by varying the spring coefficients, r 1, r 4, and r 6. For example, for rigid connections, i.e., \( \left( {r_{1} = \infty } \right),\,\left( {r_{4} = \infty } \right) \) and \( \left( {r_{6} = \infty } \right), \) the displacements will be:
1.3.2.1.2 Spring-Beam Element Idealization
In this solution, the system is considered as being consisted of three elements, (1–3), (3–4), and (4–7), as shown in Fig. 1.14b. The unknown displacements are d 3 and d 4. The rest, d 2, d 5, and d 6, will be calculated in terms of these unknown displacements. A general case of the spring-beam element for this system, which allows only axial deformation, is shown in Fig. 1.15. The stiffness matrices of the solid and spring parts are written as,
Using Eq. (1.109) the inverse of the connectivity matrix, \( \left[ T \right]^{ - 1} \), and consequently the connectivity matrix, [T] can be obtained as written:
Using Eq. (1.117b) the stiffness matrix of a general spring-beam element, \( \left( {1^{\prime} - 2^{\prime}} \right), \) for this simple system can be expressed as:
The connectivity matrices of the spring-beam elements are stated as,
The stiffness matrices of the spring-beam elements of the FE idealization of the system shown in Fig. 1.14b are calculated as written:
After the assembly process of the elements (1), (2), and (3) and using the boundary conditions of (d 1 = 0) and (d 7 = 0), the system equilibrium equation can be obtained as stated:
from which the displacements d 3 and d 4 are calculated to be:
The displacements (d 2), (d 5), and (d 6) are calculated from the connectivity relations in terms of (d 3) and (d 4), i.e., from:
which produce the same results obtained in the first solution by the standard FE idealization.

A simple spring-beam element
1.3.3 Calculation of the Connectivity Matrix
For a given or assumed spring system, the connectivity matrix of a partly connected element, [T], which is given in Eq. (1.117a), will be calculated. For convenience it is rewritten below.
As it can be realized from this equation, its inverse \( [T]^{ - 1} \) will be formed first, and then using the reverse inversion the matrix [T] will be calculated. The stiffness matrix [k] is given by Eq. (1.73a) in the local coordinates and the nonzero diagonal terms of the spring matrix [r] are stored in a vector, say {r}, as written:
If the release conditions are specified in the principal local coordinates, the stiffness matrix [k] can also be stated in a different form for the simplicity by rearranging the order of nodal degrees of freedom as written:
where \( [k_{*} ] \) indicates reordered form of [k]. The submatrices in Eq. (1.131) are expressed below with the corresponding degrees of freedom (DOF) of the element.
The submatrix \( \left[ {k_{*} } \right]_{1} \) contains axial and torsional degrees of freedom (DOF) only. The submatrices \( \left[ {k_{*} } \right]_{3} \)and \( \left[ {k_{*} } \right]_{2} \) contain translational and rotational DOF in transverse directions as shown in Fig. 1.16. In the reordered form of the element DOF, the connectivity matrix, which is indicated by \( [T_{*} ], \) and its inverse \( [T_{*} ]^{ - 1} \) can be expressed as:
where the submatrices, \( [T_{*} ]_{1}^{ - 1} ,\,[T_{*} ]_{2}^{ - 1} \) and \( [T_{*} ]_{3}^{ - 1} \) can be obtained from Eq. (1.129) as written by,
Since calculations of \( [T_{*} ]_{1} ,\,[T_{*} ]_{2} \) and \( [T_{*} ]_{3} \) are more efficient and simpler than the calculation of [T] using Eq. (1.129), the reordered form of DOF is preferably used. If, however, the release conditions are specified in a different coordinate system than the principal local coordinates, then the transformation matrix [T] will be calculated using Eq. (1.129). Here, we assume that the release conditions are specified in the local principal coordinates and the reordered form of [T] is used. In this case, the calculation of \( [T_{*} ]_{1} \) can easily be carried out analytically using Eq. (1.134a). The result is written as:
where the elements of the matrix are obtained as stated below.
For nonzero spring coefficients, the submatrices \( [T_{*} ]_{2} \) and \( [T_{*} ]_{3} \) will be numerically calculated from the reverse inversion of \( [T_{*} ]_{2}^{ - 1} \) and \( [T_{*} ]_{3}^{ - 1} \) using Eqs. (1.134b, c). In this numerical calculation, some special conditions of the spring coefficients may occur as pointed out next. In the structural analysis, most elements are rigidly connected and also there may be some elements that partly connected in some directions with assumed spring coefficients. A rigid connection can be made by using an infinitely large spring coefficient in the corresponding direction. This produces a unit diagonal term and zero off-diagonal terms of the related matrix, \( [T_{*} ]_{2}^{ - 1} \) or \( [T_{*} ]_{3}^{ - 1} \) so that the numerical calculation of the reverse inversion can be carried out without any difficulty. However, for a zero-spring condition, i.e., a loss or no-connection case (fully released), the numerical inversion of \( [T_{*} ]_{2}^{ - 1} \) or \( [T_{*} ]_{3}^{ - 1} \) cannot be carried out simply since, in the fully released direction, infinite values in \( [T_{*} ]_{2}^{ - 1} \) or \( [T_{*} ]_{3}^{ - 1} \) are obtained. The solution of this special case is presented in the following section.

1.3.3.1 The Case of Zero-Spring (Fully Released) Conditions
As mentioned above, in the case of zero-spring values in directions of some DOF, the inversion of the matrix \( [T_{*} ]_{2}^{ - 1} \) or \( [T_{*} ]_{3}^{ - 1} \) cannot be carried out numerically. This problem can be solved in an alternative way. It is assumed for the generality that a combination of nonzero spring and zero-spring conditions are considered. The solution procedure is performed in two steps as explained below.
-
1.
First, it is assumed that the element is rigidly connected in loss or fully released directions (directions with zero springs) and it is partly connected in directions of nonzero springs in the reordered form of DOF. Using Eqs. (1.117a, b) the related transformations of this step are given as:
The matrix \( [T_{*} ]_{i\,(r = \infty )} \) is calculated from the inversion of the matrix \( [T_{*} ]_{2}^{ - 1} \) or \( [T_{*} ]_{3}^{ - 1} \) whichever is applicable, with unity in diagonal and zero values in off-diagonal terms in fully released (with zero-spring values) directions, \( [k_{*} ]_{i} \) denotes \( [k_{*} ]_{2} \) or \( [k_{*} ]_{3} , \) whichever is applicable, given by Eq. (1.132b) or (c).
-
2.
In the second step, it is assumed that the element is rigidly connected in all directions, except fully released or loss directions since all springs are included in the first step. Loss directions indicate zero connectivities in associated directions and they have to be released accordingly to obtain the original release conditions. From this release operation, another transformation matrix is obtained with the related transformations written as:
where the stiffness matrix \( [k^{\prime}_{*} ]_{i\,(r = \infty )} \) is the same as calculated above in step (a). The transformation matrix \( [T_{*} ]_{i\,(r = 0)} \) will be calculated by using the criterion that stiffness forces are all zero in fully released directions. In order to calculate this matrix easily, the DOF of the displacement vector \( \{ d_{*}^{'} \}_{i(r = \infty )} \) are rearranged in the order of released directions first and then rigidly connected directions. The displacement vector with rearranged DOF is denoted by \( \{ d^{\prime}_{**} \}_{i(r = \infty )} \) and the corresponding stiffness matrix is denoted by \( [k^{\prime}_{**} ]_{i\,(r = \infty )} \) as stated by,
where \( \{ d^{\prime}_{**} \}_{1} \) is the displacement vector in the released directions and \( \{ d^{\prime}_{**} \}_{2} \) is that in the rigidly connected directions. The stiffness forces of this system are calculated from the following equation:
The displacement vector \( \{ d^{\prime}_{**} \}_{1} \) in the released directions can be calculated in terms of the displacements vector \( \{ d^{\prime}_{**} \}_{2} \) in rigidly connected directions as written from Eq. (1.136d):
Having introduced \( \{ d^{\prime}_{**} \}_{1} \) from Eq. (1.136e) into Eq. (1.136c) the displacement vector \( \{ d^{\prime}_{**} \}_{i(r = \infty )} \) can be expressed as written:
from which the transformation matrix \( [T_{**} ]_{i\,(r = 0)} \) is defined as:
Next step is to rearrange the DOF to obtain the previous sequence of displacements, i.e., \( \{ d^{\prime}_{*} \}_{i(r = \infty )} , \) and accordingly to reorder \( [T_{**} ]_{i\,(r = 0)} \) to obtain the required transformation matrix \( [T_{*} ]_{i\,(r = 0)} , \) which will be used in Eq. (1.136b). Unlike the stiffness matrix, in order to calculate the concentrated load vector and the mass matrix for this special case, the transformation matrix \( [T_{*} ]_{i} \) between the displacement vectors, \( \{ d_{*} \}_{i} \) and \( \{ d^{\prime}_{*} \}_{i} , \) must be constructed. For this purpose, Eqs. (1.136a, b) are used. The results are as written:
The calculation procedure of this special case is summarized below.
where (i = 2 or 3). The calculation procedure is explained by an example in the next section.
1.3.3.2 Example of Transformation and Stiffness Matrices of a Spring-Beam Element with Fully Released and Partly Connected DOF
The calculation procedure of the spring-beam element with fully released and partly connected conditions is explained in this example. For this purpose, it is assumed that the DOF, 6 and 12, in Fig. 1.16a are fully released and the DOF, 2 and 8, are partly connected with spring coefficients, r 2 and r 8. The transformation matrix, \( [T_{*} ]_{3} , \) and the stiffness matrix, \( [k^{\prime}_{*} ]_{3} , \) will be calculated analytically step by step to explain the aforementioned calculation procedure.
Step 1:
The transformation matrix, \( [T_{*} ]_{3\,(r = \infty )} , \) which is given in Eq. (1.136a), will be calculated using \( \left[ {T_{*} } \right]_{3}^{ - 1} \) provided that the spring coefficients in the released directions are infinite, i.e., r 6 and r 12 are infinite (rigid connection). For this special case, \( \left[ {T_{*} } \right]_{3(r = \infty )}^{ - 1} \) can be stated using Eq. (1.134c) as written by,
From the reverse inversion of \( \left[ {T_{*} } \right]_{3(r = \infty )}^{ - 1} , \) the transformation matrix \( [T_{*} ]_{3\,(r = \infty )} \) can be found as written:
The stiffness matrix \( [k_{*}^{'} ]_{3\,(r = \infty )} \) will be calculated using Eq. (1.136a), in which (i = 3) and \( \,[k_{*} ]_{3} \) is as given by Eq. (1.132c). The result is:
in which the stiffness terms, \( k_{*11} \) and \( k_{*12} , \) are defined as:
Step 2:
The element possessing the stiffness matrix \( [k_{*}^{'} ]_{3\,(r = \infty )} \) is now released. For this operation, the element DOF are rearranged so that DOF in the released directions (6 and 12) are replaced in the first order and DOF in the rigidly connected directions (2 and 8) are in the second order. The associated stiffness matrix is denoted by \( [k_{**}^{'} ]_{3\,(r = \infty )} \) as stated:
From this stiffness matrix, the submatrices \( [k_{**}^{'} ]_{11} ,\,[k_{**}^{'} ]_{12} \) and \( [k_{**}^{'} ]_{22} , \) which are given in Eq. (1.136c), can be easily expressed as:
The inverse of \( [k_{**}^{'} ]_{11} \) can be expressed as written by,
Having introduced \( [k_{**}^{'} ]_{11}^{\, - 1} \) from Eq. (1.141c) and \( [k_{**}^{'} ]_{12} \) from Eq. (1.141b) into Eq. (1.136g) the transformation matrix, \( [T_{**} ]_{3\,(r = 0)} \) can be obtained as written by,
This transformation matrix is now rearranged according to the order of DOF used above in step (a). This new form is denoted by \( [T_{*} ]_{3\,(r = 0)} \) and stated as:
The corresponding stiffness matrix is calculated using Eq. (1.138b) as written by,
The transformation matrix, which is used to calculate the consistent load vector and mass matrix, is calculated using Eq. (1.138a) as written by,
As a special case, when r 2 and r 8 approach infinity, i.e.,\( \left( {r_{2} \to \infty \;{\text{and}}\;r_{8} \to \infty \,} \right), \) the beam shown in Fig. 1.16a becomes a simply supported beam, i.e., the beam is hinged at both ends. In this case, the transformation matrix \( [T_{*} ]_{3} \) and the stiffness matrix \( \,[k_{*} ]_{3} \) become as written by,
The stiffness terms k 22, k 26, k 66 and k 612 are extracted from Eqs. (1.73b, c) as written by,
Having used Eq. (1.145c) in Eq. (1.145b) it is obtained that \( \left( {k_{*11}^{'} = 0} \right), \) which results in a zero stiffness matrix as expected. For these values of k 22, k 26, k 66 and k 612 the transformation matrix \( [T_{*} ]_{3} \) is obtained as written:
Since a simply supported beam is statically determinate, its stiffness forces will be zero and only the external loads produce member internal forces. If it is assumed that the beam is subject to a constant distributed load q y , then the consistent load vector is obtained as:
The consistent load vector of the released element \( \{ p_{*}^{'} \}_{3} \) is now calculated using Eq. (1.138c) as written by,
which is equivalent to support reactions of a simply supported beam under a constant distributed loading.
The calculation of the connectivity matrix [T] explained above looks like a complicated task analytically. But, since it is calculated numerically in a structural analysis program, it can be programed easily and systematically as explained.
1.3.4 Member Releases in a Different Coordinate System
Sometimes it is also possible that the released directions do not coincide with the principal coordinate directions. In this case, the DOF, stiffness matrix, mass matrix and the consistent load vector of the element must be transformed to the coordinate system of the released directions. In Fig. 1.17, the coordinates of the released directions are denoted by (X R, Y R, Z R), the local principal coordinates are denoted by (X L, Y L, Z L) and the global coordinates are (X, Y, Z). It is given that member releases are in the (X R, Y R, Z R) coordinate directions, which are fully defined by the rotations (θ X , θ R, θ Y ) shown in Fig. 1.17. The coordinate transformation between global and released directions is stated as:
where [t R] is as defined:
The vectors of released directions are stated in terms of the cosine directions as can be written:
in which (θ x , θ R and θ y ) are given or known, (φ, m x , m y , m z ) are unknown and to be calculated from the dot (scalar) and cross (vector) products of the vectors \( \vec{X}_{\text{R}} \) and \( \vec{Y}_{\text{R}} , \) which result in the following relations.
The transformation relations between the displacements in the global and released coordinates are stated below.
where the transformation matrix \( [T_{R} ]\, \) is:
As it can be realized from Eq. (1.150a) transformations of the element must be made to the global coordinates first as presented in Eq. (1.102). Then, the transformations from the global coordinates to the released coordinates are made using the relations given in Eq. (1.150a). The results of these transformations are written as:
where [k R] is the stiffness matrix, {p R} is the consistent load vector, and [m R] is the mass matrix in the released coordinates. Having obtained the stiffness matrix, consistent load vector and mass matrix in the released coordinates, the release process will be carried out using Eqs. (1.117b, c, d). At the end of the release process, the stiffness matrix, consistent load vector and mass matrix are denoted by the following notations.
These quantities must be transformed to the global coordinates again for the assembly process of the system as written below.
where \( [k_{\text{G}}^{'} ],\,\{ p_{\text{G}}^{'} \} \) and \( [m_{\text{G}}^{'} ] \) are respectively the stiffness matrix, consistent load vector, and mass matrix of the released element in the global coordinates. If the released coordinates coincide with the global coordinates, then the transformation matrix [T R] becomes a unit matrix, which simplifies the calculations.

Definition of rotation angles (θ X, θ R, and θ Y) of member release directions. θ X: Angle between global X and projection of X R on (X–Y) plane, measured from the global X to the direction of global Y as positive. θ R: Angle between projection of X R on (X–Y) plane and X R, measured from the projection to the direction of X R as positive. θ Y: Angle between global Y and projection of Y R on (Y–Z) plane, measured from the global Y to the direction of global Z as positive. φ: Angle between projection of Y R on (Y–Z) plane and Y R, measured from the projection to the direction of Y R as positive. This angle must be calculated
1.4 Formulation of Eccentrically Connected Members
In the calculation model of a structural system, it is assumed that center lines (theoretical axes) of members are connected to each other at points of member intersections, which are defined as theoretical joints or nodes. Although it does not occur usually, sometimes member connections at a theoretical joint can be possible only through some eccentricities, or theoretical axes of some members do not pass through the idealized nodal points. More commonly, theoretical joints are not always located at member ends and lie outside the actual member connections. Distances between the theoretical (idealized) joints and the actual member ends can be considered as rigid blocks. This is demonstrated by a simple example shown in Fig. 1.18. The theoretical axis of the member (2–3) does not cross the theoretical axis of the member (4–5) as shown in Fig. 1.18a. The connection of these two members can be made only using a rigid block, member (3–4) in Fig. 1.18a. In the calculation model, the theoretical joints used as structural nodes are (1, 2, 3, 4) as shown in Fig. 1.18b. For the analysis, there may be two possibilities as (a) member (2–A) is assumed to be eccentrically connected to the member (3–4) at the member end (A) with the rigid block (A–3), (b) member (B–4) is assumed to be eccentrically connected to the member (2–3) at the beginning of the member (B) with the rigid block (B–3). For the analysis, the stiffness, load, and mass properties at the end (A) of the member (2–A), or at the beginning (B) of the member (B–4), must be transformed to the joint (3). Then, the assembly process will be carried out to find the system stiffness and mass matrices and the load vector. The transformation of eccentrically connected member properties to associated theoretical joints of the system can be made by using rigid body kinematics [74] as explained in the following paragraph.

Demonstration of member eccentricities. a Original members. b Eccentrically connected member
In order to explain the transformation of eccentrically connected member, a member (i–j) with eccentricity at the member end (i) is assumed as shown in Fig. 1.19 in global coordinates (X, Y, Z). The member is (A–i–j) before deformation and \( \left( {A'\!\!-\!\!i'\!\!-\!\!j'} \right) \) after deformation. The element (A–i) of the undeformed state is a rigid block and (i–j) is the actual flexible member. Under the deformation the rigid block translates and rotates with rigid body motion while the flexible part (i–j) deforms. The rigid block is fully determined by the location vector \( \left( {\vec{e}} \right) \) with projections (e X , e Y , e Z ) on the global coordinates (X, Y, Z), respectively. Further, the following definitions are made:

Deformation of an eccentrically connected member
-
\( \vec{e}' : \) location vector of the rigid block after the deformation.
-
\( \vec{u}_{i} : \) displacement vector of the joint (i) of the member (i–j).
-
\( \vec{u}_{A} : \) displacement vector of the joint (A) of the rigid block (A–i)
The location vector \( \left( {\vec{e}'} \right) \) can be stated from Eq. (1.13a) as:
where [R] is the rotation matrix given by Eq. (1.23). The displacement vectors can be written from Fig. 1.19 as:
from which it can be stated as similar to Eq. (1.24):
where the matrix \( \tilde{\Uppsi } \) is given by Eq. (1.15) provided that the small rotation angles (θ X , θ Y , θ Z ) are about the global coordinates as shown in Fig. 1.19 and \( \{ e\}^{T} = \{ e_{X} ,\,\,e_{Y} ,\,\,e_{Z} \} . \) Eq. (1.154b) can also be written in an alternative way as:
in which a subscript (i or A) denotes the corresponding member end, [E] i is a skew-symmetric eccentricity matrix, and {θ} i is the rotation vector defined by,
From the rigid body mechanics, it is stated that the rotation vectors at both ends of the rigid block (A–i) are the same, i.e., ({θ} i = {θ} A ). Thus, the FE displacement vector of the joints (i) and (A) are stated as:
from which the displacement vectors {d} i and {d} A are linked together by a transformation matrix [T e ] i as written by,
in which I 3 is a unit matrix with (3 × 3) dimensions. The subscript (G) denotes global coordinates. Here, the eccentricities are measured from the flexible member ends in the global coordinates. For the generality, now suppose that the member is eccentrically connected from both ends as shown in Fig. 1.20. The flexible part is (i–j), the rigid blocks are (A–i) at the member end (i), and (j–B) at the member end (j). The joints (A) and (B) are the theoretical nodal points (system joints). For the assembly process, the stiffness, mass, and loading properties of the flexible member (i–j) must be transferred to the joints (A) and (B) of the rigid blocks. The transformation of the FE displacement vector at the member end (i) to the joint (A) of the rigid block (A–i) is given by Eq. (1.158a). Similarly, the transformation of the displacement vector at the member end (j) to the joint (B) of the rigid block (j–B) can be written as:
where \( [E]_{j} \) is the eccentricity matrix defined at the end (j) of the member (i–j) as similar to Eq. (1.156). The displacement vector of the element (i–j) can now be transferred to the joints (A) and (B) of the fictitious element (A–B). This is stated as:
where {d G}e denotes the displacement vector of the eccentric (fictitious) member (A–B). The transformation matrix [T e ] is defined as:
The back transformation of the displacements can be stated from Eq. (1.159a) as written by,
By using energy equivalences, the stiffness, mass, and loading properties of the eccentric element can be stated in global coordinates as similar to Eq. (1.102), which are:
For eccentric members, these equations are used in the assembly process to find the system matrices and vectors. After the solution of the system equation, the displacement vector {d G}e is extracted from the system displacement vector and using Eq. (1.159a) the displacement vector of the flexible element [(i–j) in Fig. 1.20] {d G} is calculated. Accordingly, member internal forces are calculated once the displacements, {d G} in vector notation, are known.

An eccentrically connected member from both ends
1.5 An Interface Beam Element for the Soil–Structure Interaction and Deformation of Soil Under R-Wave Propagation
Structures are supported on ground either by piles or on a foundation basis, such as offshore platforms and building structures, so that soil–structure interaction phenomenon becomes an inevitable reality. Some other structural types are completely buried in, or rested on, the ground such as pipelines, tunnels, and underground structures. The analysis of such structures may be carried out in practice by using conventional finite element methods assuming that the phenomenon of the soil–structure interactions is represented by some viscoelastic models (massless spring and dashpot systems) at the interface nodes (supports). This procedure may produce reasonable results if a fine structural mesh is used. In this section, an alternative 3D soil–beam element is presented as it is more precise and general than representing soil effects by some spring-dashpot models at the supports. For an accurate analysis of the soil-structure interaction phenomenon a continuum finite, or boundary, element modeling is required [75–77], which is more general and straightforward. But, it is costly in terms of data preparation and calculation time, especially in nonlinear and dynamic analyses. Therefore, a simple finite element formulation for the soil–structure interaction problem seems to be more attractive and practical [78]. In the literature, there are numerous publications on 2D beams resting on Winkler type elastic foundations, see i.e., [79–82], without including effects of shear forces in the soil whereas they are included in some works, i.e., [78, 83, 84], for linear static analyses. For dynamic analyses, these models are approximate since radiation and hysteretic damping terms of the soil are not included. In the formulation of the interface element for the soil–beam interactions, which is presented here, it is assumed that the soil medium is represented by a linear viscoelastic continuum including the shear force effects. For this purpose, the differential equations of the beam in the transverse directions (y, z) will be formulated in a different way under external distributed loadings as explained below.
Having used Eqs. (1.10a, b) the following equations in the (y) and (z) directions can be obtained as:
Having introduced (dQ y /dx) and (dQ z /dx) from Eq. (1.8b) into Eq. (1.162a), and then taking the differentiation with respect to (x) under a constant axial force (N) it is obtained that,
Now, we use \( \kappa_{z} \) and \( \kappa_{y} \) from Eqs. (1.3) and (1.6), and (dM z /dx) and (dM y /dx) from Eq. (1.11a) in Eq. (1.162b), and then taking the differentiation with respect to (x) (keeping in mind that the fourth derivatives of displacements on the right-hand side of Eq.(1.162b) are zero since they are cubic functions) it is obtained that,
Having introduced (dQ y /dx) and (dQ z /dx) from Eq. (1.8b) into Eq. (1.162c), the required differential equations can be obtained in terms of external loadings as written by,
where \( \bar{q}_{y} \) and \( \bar{q}_{z} \) can be considered as pseudo-distributed loadings applied on the beam, which include shear effects \( (\alpha_{y} \;{\text{and}}\;\alpha_{z} ) \) and effects of the axial force (N) of the beam. They are defined as:
Using these applied pseudo-distributed loadings on the beam the external work will be calculated. But, before doing that some extra distributed loadings at the soil–beam interfaces, which are defined as interface loadings arising from the soil due to deformations of the beam, must be added to these pseudo-distributed loadings. Calculation of the interface loadings and updating the pseudo-distributed loadings are explained in the following subsection.
1.5.1 Modeling of Soil Medium and Calculation of Interface Loadings
In the dynamic analysis of ground or soil-structures based on the theory of wave propagation or on the finite element principle, an important issue is to represent the cyclic behavior of soils in a form of material model to construct a relation between shear stress and shear strain [85]. Modeling of soil behavior under dynamic loading conditions must be made so that the model can represent deformation characteristics in the range of strains under consideration. When the soil behavior is in the range of small strains, an elastic soil model can be used and the shear modulus will be a key parameter in properly modeling the soil behavior. When the soil behavior is in the range of medium strains, the soil behavior becomes approximately elastoplastic and the shear modulus decreases as the shear strain increases. In this case, energy dissipation occurs during application of load cycles in soils. The energy dissipation is mostly rate-independent and of hysteretic nature. A damping ratio can be used to represent the energy dissipation in soils. Since the strain level is still small the shear modulus and damping ratio do not change with cyclic load application. This kind of behavior can be represented by using the linear viscoelastic theory to an acceptable degree of accuracy. The shear modulus and damping ratio are the key parameters to represent soil properties in this medium strain range and the useful analytical tool is the equivalent linear method based on the viscoelastic concept. In this model, the stress–strain relation is assumed linear with energy dissipation in the soil. This model has usually been used to represent soil behavior even in the slightly nonlinear range where damping has important effects. This model of the soil is also assumed in this book. Among others the Kelvin–Voigt model, which is also called Voigt model, is widely used to represent soil behavior. In this model, the elastic property of the soil is represented by a purely elastic spring and the damping characteristics are expressed by a purely viscous damper (dashpot), which are connected in parallel. In this model, the shear stress of the soil, e.g., in the z direction, is expressed [85] as:
or in terms of complex shear modulus it is written as:
in which G sz and μ sz are respectively the shear modulus and coefficient of viscosity of the soil in the z direction, ω is the angular frequency. Equation (1.165b) will be used to calculate the shear force of the soil, Q sz , in the z direction.
The soil medium around the beam element is assumed to be homogenous, isotropic half-space. For the linear analysis, it can be idealized in different ways as to be elastic and time dependent models among which Winkler, elastic continuum, and two-parameter elastic models [80] may be used largely in practice. The dynamic Winkler model, which is defined by a frequency dependent complex-subgrade-modulus, is commonly used to represent the soil behavior during the response process. This model assumes that the soil reaction is related to the surface deflection only, whereas the two-parameter soil model takes into account not only the surface deflection but also the shear deformation of the soil. In this book, it is assumed that the Pasternak model [80] represents the soil medium to calculate an interface loading of a soil–beam element. This model consists of two parts, one is for purely shear deformation (viscoelastic Shear layers with unit depths) and the other one is for the deflection (dynamic Winkler model) as shown in Fig. 1.21 on the (x–z) plane of member local coordinates. In this figure, k sz and c sz denote the spring and radiation damping coefficients of the soil, respectively, and u zr is the relative vertical displacement of the beam, which is the difference between the absolute beam and ground displacements (u z − u gz ). The shear force Q sz due to the shear deformation of a viscoelastic soil with a unit area (unit depths) under the relative deformation u zr of the beam can be stated as:
From the equilibrium of an infinitesimal soil element (dx), the complex interface loading in the z direction of the member local coordinates can be obtained as:
in which the complex shear modulus \( G_{sz}^{*} \) is defined in Eq. (1.165b) and the first term on the right hand side is due to the dynamic Winkler model with a complex-subgrade-modulus, \( k_{sz}^{*} \) defined by,
Here, k sz is the spring coefficient and c sz is the radiation damping coefficient in the z direction of member local coordinates. This simple model of the interface loading, which is given by Eq. (1.167a), can be extended in other (x and y) coordinate directions so that complete interface loadings may be conveniently stated by vector notation in the member local coordinates as:
where {u r} is the relative displacement vector of the beam in the local coordinates of the beam, which is stated as:
In Eq. (1.169a), {u} is the displacement vector of the beam and {u g} is the displacement vector of the soil in the beam local coordinates due to excitation in the ground such as earthquake motion. These are defined as:
The matrices, \( [k_{s} ]^{*} \) and \( [G_{s} ]^{*} \) in Eq. (1.168) are the complex spring- and shear-rigidity matrices of the soil. These matrices are diagonal as defined:
In Eq. (1.170a), the subgrade modulus of the soil in the axial direction of the beam, \( k_{sx}^{*} , \) represents an axial skin friction and the end bearing resistance of the member if the member end is free in the soil such as a pile end. The subgrade moduli, \( k_{sy}^{*} \) and \( k_{sz}^{*} , \) are due to lateral deformations, whereas the modulus \( r_{sx}^{*} \) represents the torsional skin friction, \( r_{sy}^{*} \) and \( r_{sz}^{*} \, \) represent rotational subgrade moduli. In Eq. (1.170b), \( G_{sx}^{*} ,\,G_{sy}^{*} \) and \( G_{sz}^{*} , \) are the complex shear moduli of the soil in the beam local coordinate directions (x, y, z), respectively. These soil properties are time and loading dependable in practice [85], so that average design values may be used in the analysis. A rapid loading rate increases the stiffness of the soil, which is a favorable case unlike the soil-degradation effects under a cyclic loading. One other issue in the soil–structure interaction phenomenon during strong motion earthquakes is that separation between the soil and structure can occur [86], especially at soil layers close to the mudline of offshore pile foundations. However, due to the soil liquefaction after a number of stress cycles, a perfect bond between the soil and structure may occur as it is assumed in this book.

Representation of the soil medium and soil–beam interface loading
Having introduced Eq. (1.169a) into Eq. (1.168) the soil–beam interface load vector \( \{ f_{s} \}^{*} \) can be stated in terms of the displacement vectors of the beam and soil as written:
This interface load vector is defined in the member local coordinates. Due to spatial variations of soil properties, if the soil properties are defined in a different coordinate system, e.g., \( \left( {x',\,y',\,z'} \right) \) as shown in Fig. 1.22, transformations are used to find the interface load vector in the member local coordinates (x, y, z). For this purpose, in the soil coordinate system \( \left( {x',\,y',\,z'} \right),\,\{ u^{'} \} \) and \( \{ u_{\text{g}}^{'} \} \) denote respectively displacement vectors of the beam and soil, \( \{ u_{\text{r}}^{'} \} \) denotes the relative displacement vector, \( [k_{\text{s}}^{'} ]^{*} \) and \( [G_{\text{s}}^{'} ]^{*} \) are the matrices of soil properties, and \( \{ f_{\text{s}}^{'} \}^{*} \) is the interface load vector. Further, it is assumed that the transformation between the relative displacement vectors {u r} and \( \{ u_{\text{r}}^{'} \} \) is known as stated:
By using equivalent external works of interface loadings in the soil and beam coordinate systems, i.e., \( \left( {\{ u_{\text{r}}^{'} \}^{T} \{ f_{\text{s}}^{'} \}^{*} = \{ u_{\text{r}} \}^{T} \{ f_{\text{s}} \}^{*} } \right), \) the soil property matrices \( [k_{\text{s}} ]^{*} \) and \( [G_{\text{s}} ]^{*} \) in the beam local coordinates (x, y, z) are obtained as stated:
which are used in Eq. (1.171) to calculate the required interface load vector \( \{ f_{\text{s}} \}^{*} . \) It is worth mentioning that, due to transformation, the matrices \( [k_{\text{s}} ]^{*} \) and \( [G_{\text{s}} ]^{*} \) calculated from Eq. (1.173) are not diagonal any more although \( [k_{\text{s}}^{'} ]^{*} \) and \( [G_{\text{s}}^{'} ]^{*} \) are diagonal, but remain symmetric. Having calculated the interface load vector, formulation of the soil–beam interface element can be carried out as explained in the following section.

Coordinate systems of the interface beam and soil properties
1.5.2 Formulation of Interface Element for Soil–Beam Interactions
In the derivation of an interface element for soil–beam interactions the total potential energy, which is stated in the complex domain, is used. It is assumed here that the classical beam theory is applied using pseudo-distributed loadings as stated in Eq. (1.164). For convenience, the components of the pseudo-distributed loadings are stated by vector notation in the complex domain as:
where {q}* is the applied effective complex load vector of the beam, [L α ] and [L n ] are diagonal matrices representing the shear effects, \( \alpha_{y} \) and \( \alpha_{z} , \) and the effect of the axial force N. They are defined as:
The applied effective complex load vector {q}* of the beam is expressed from Fig. 1.21 as written:
in which {q 0} is the externally applied distributed load vector as shown in Fig. 1.21 for the component in the z direction, q 0z , and \( \{ f_{\text{s}} \}^{*} \) is the complex interface load vector given by Eq. (1.171). Having introduced Eq. (1.174c) into Eq. (1.174a) the complex pseudo-distributed load vector \( \{ \bar{q}\}^{*} \) is obtained as stated:
assuming that the second derivative of {q 0} is zero, which indicates a constant or linear distribution. Now introducing Eq. (1.171) into Eq. (1.175a) the complex pseudo-distributed load vector \( \{ \bar{q}\}^{*} \) can be expressed in terms of displacements and their derivatives in vector notations as written:
where the complex matrix \( [L]^{*} \) is defined as:
The total external work of the beam done by the complex pseudo-distributed load vector \( \{ \bar{q}\}^{*} \) is a complex scalar and can be calculated from \( \left( {{\text{d}}W_{q}^{*} = d\{ u\}^{T} \{ \bar{q}\}^{*} } \right) \) or \( \left( {{\text{d}}W_{q}^{*} = \{ \bar{q}\}^{*T} d\{ u\} } \right). \) In order to maintain symmetry property of stiffness matrices induced by the soil, we define the external work as written:
or using \( \{ \bar{q}\}^{*} \) from Eq. (1.175b) the total external work \( W_{q}^{*} \) can be expressed as:
in which \( \{ q_{\text{g}} \}^{*} \) is the complex distributed load vector due to ground motion depending on the soil properties and shear constants of the beam \( \alpha_{y} \) and \( \alpha_{z} . \) It is defined as:
From Eq. (1.48a) the displacement vector of the beam can be sated as:
where the matrices [N u } and [N θ ] are given by Eqs. (1.50a, b). Having introduced {u} from Eq. (1.177) into Eq. (1.176b) the total external work \( W_{q}^{*} \) can be expressed as:
In this equation, {p q } is the consistent load vector of the beam due to external applied loads as given by Eq. (1.66), {p g }* is the consistent load vector due to ground motion, [k bn ] is the stiffness matrix introduced by the axial force N, [k bw ]* and [k bs ]* are respectively stiffness matrices of the beam due to soil Winkler and shear properties. These quantities of the soil–beam interface element, which are introduced by the ground motion and soil properties, are defined as:
By using the stationary property of the total potential energy, given by Eq. (1.53), with the total complex external work in Eq. (1.178), the stiffness equation of the soil–beam interface element can be obtained in local coordinates as written in complex domain:
where {f}* is the complex member-end force vector, [k]* is the complex member stiffness matrix and {p}* is the complex member consistent force vector, which are defined as:
In Eq. (1.181), [k b ] denotes the member stiffness matrix defined in Eq. (1.63) and given by Eq. (1.73a). The real and imaginary parts of the complex stiffness matrices, [k bw ]* and [k bs ]*, can be separated as stated:
in which the real parts are the stiffness contribution and the imaginary parts are the damping contributions as written by,
In Eq. (1.183), the subscripts, b, w, and s, denote respectively the beam, soil Winkler model and soil shear model, [c b ] is the material damping matrix of the beam as given by Eq. (1.83) and the terms in brackets denote the contributions of the soil. The stiffness and damping matrices, [k bw ] and [c bw ], are calculated from Eq. (1.179d) by using spring coefficients and dashpot constants of the dynamic soil Winkler model given in Eq. (1.170a). The stiffness and damping matrices, [k bs ] and [c bs ], are calculated from Eq. (1.179c) by using shear modulli and coefficients of viscosity of the soil given in Eq. (1.170b). In order to calculate the consistent load vector of the beam due to a ground motion using Eqs. (1.176c) and (1.179a) the displacement vector of the soil {u g} is required. For this purpose, earthquake ground motion based on the Rayleigh wave propagation is used in this book as explained in the next section.
1.5.3 Ground Deformation Under R-Wave Propagation and Calculation of the Exerted Force Vector
Seismic waves are related to ground vibration caused by an earthquake which releases huge energy in the Earth. Seismic waves originate from the source (focus) of the earthquake, which lies underground at a shallow, intermediate, or deep depth, and they travel in all directions through the body of the Earth. These waves, traveling through Earth, are called body waves. Seismic waves also travel along the surface of Earth, which are called surface waves. There are two main types of body waves as P-waves (primary) and S-waves (secondary). P-waves compress and expand the material as they propagate through solids, liquids, and gases. They have the greatest velocity and reach first to the Earth’s surface. S-waves travel through materials by shearing them. They propagate only through solids since liquids and gases do not posses particular shapes. These waves travel slower through Earth and reach to Earth’s surface as being the second, see e.g., [87–90].
Surface waves differ from body waves as they do not travel through the Earth, but instead, they travel along or parallel to the surface of the Earth. Surface waves are the most destructive and they cause the most damage, which behave like S-waves. They cause up and down and side to side movements as they travel. They are slower than S-waves. There are two types of S-waves as Love and Rayleigh waves. Love waves cause horizontal shearing of the ground and vibrate in a perpendicular direction to wave motion as they propagate. Rayleigh waves cause both horizontal and vertical movement within the ground. They vibrate in a rolling motion in the same direction as wave motion. Most of the shaking of an earthquake is due to these waves. Since Rayleigh waves are the most destructive and cause the most damage [91], they are used in this book as the source of ground deformations due to an earthquake motion.
Rayleigh wave propagation is a special case of wave equations that satisfy a couple of boundary conditions as being a zero-stress state at the ground surface. Rayleigh wave is an interaction phenomenon of the P-wave and S-wave, traveling on the surface of the Earth. Wave equations can be found elsewhere, see e.g., [89], but for the completeness, the Rayleigh wave equation is presented here first, and then the ground deformations are derived. It is assumed that the soil medium is represented by an isotropic, homogenous elastic half-space. The dynamic equilibrium equations of a 2D-soil element, which is shown in Fig. 1.23, are stated as:
in which ρ s is the mass density of the soil. From the theory of elasticity [23, 24] the stress and strain components are written as:
where E s, G s, and ν s are respectively the elasticity modulus, shear modulus and Poisson’s ratio of the soil. Having defined vp and vs as being velocities of the P-wave and S-wave respectively by:
and using Eq. (1.185) into Eq. (1.184), the dynamic equilibrium equations of the soil element can be stated in terms of derivatives of the displacements as written:
Now, let us define two displacement potentials as ϕ and ψ such that:
and having used these potentials in Eq. (1.187) the following differential equations can be obtained.
The solution of these differential equations yields the potential functions, ϕ and ψ, as written:
in which A and B are constants to be determined from boundary conditions, k is the wave number and c is the wave velocity as defined by:
In Eq. (1.190b), λ is the wave length, T and ω are respectively the period and frequency of the wave. As it is seen from Eq. (1.190a), the potential ϕ is characterized by the P-wave and ψ is characterized by the S-wave. Having introduced these potentials from Eq. (1.190a) into Eq. (1.188), the absolute displacements u x and u z of the soil can be obtained as:
Equation (1.191) is general statements of displacements due to plane waves. In order to obtain the R-wave propagation the zero-stress condition (σ z = 0 and τ xz = 0) at the ground surface (z = 0) is imposed. Having carried out this imposition from Eq. (1.185), the following equations are obtained.
or using the relations:
it is written as:
For the nontrivial solution of Eq. (1.192c) its determinate must be zero, which leads to the wave dispersion relation as:
where v R is the velocity of the R-wave propagation as obtained from the solution of the dispersion relation, which leads to:
From Eq. (1.192c) the constant B can be obtained in terms of the constant A as written by:
Having introduced B from Eq. (1.194) into Eq. (1.191) the displacements u x and u z , which will be denoted by u gx and u gz henceforth (the subscript g indicates ground), can be stated as:
where \( \hat{u}_{{{\text{g}}0}} \) is the maximum amplitude of the ground displacement at the surface. Since the vertical displacement u z is greater than the horizontal displacement u x , the amplitude \( \hat{u}_{{{\text{g}}0}} \) is taken as the amplitude of u z , i.e., \( \hat{u}_{{{\text{g}}0}} = \hat{u}_{zg} (0), \) at the ground surface. The ratio between amplitudes of u z and u x at the surface can be obtained as written:
The coefficient A may be considered as an amplification factor and determined using \( \hat{u}_{g0} \) at the ground surface as written:
In the reel domain, the trajectory of the soil particle motion at a depth of z is an elliptical form with the equation expressed as:
The absolute displacement functions, u x (z) and u z (z), decay with increasing depth of the ground as shown in Fig. 1.24 for a unit amplitude of \( \hat{u}_{zg} (0) \) and soil properties given in the figure. The velocities of waves are calculated to be, vp = 307.8 m/s, vs = 125.7 m/s, and vR = 118.4 m/s. The velocity of the R-wave is somewhat less than that of the S-wave.

An infinitesimal element in 2D isotropic, homogenous elastic soil medium

Ground displacements under R-wave propagation and trajectory of particle motion
Having determined the ground displacements as given in Eq. (1.195a) in the wave propagation coordinates, the rotation of the soil will also be calculated. Since a 2D wave propagation is considered in the (x–z) plane, shown in Fig. 1.23, there is only one rotation in this plane as θ gy (z), which is vectorially in the y coordinate direction normal to the (x–z) plane. Since a small rectangular element of the soil becomes a parallelogram after the deformation, the rotation can be expressed as:
Having introduced u gx and u gz from Eq. (1.195a) into Eq. (1.197a) the absolute rotation θ gy (z) is obtained as stated:
As mentioned above other rotations (θ gx and θ gz ) are zero in the coordinates of wave propagation. The displacement and rotation vectors of the absolute ground deformation {u gR} a and {θ gR} a under the R-wave propagation can be written in the coordinates of wave propagation as:
Having determined displacements and rotations of the ground under the R-wave propagation, the exerted consistent load vector of the beam can be calculated using Eqs. (1.176c) and (1.179a) as presented in the next section.
1.5.3.1 Member Consistent Load Vector Due to Ground Deformation Under R-Wave Propagation
Formulation of the member consistent load vector exerted by ground deformations is presented in Sect. 1.5.2. It is calculated from Eq. (1.179a), in which the complex distributed load vector of ground motion \( \{ q_{\text{g}} \}^{*} \) is defined by Eq. (1.176c) in member local coordinates as depending on ground displacements and their derivatives. The ground displacements are formulated in the R-wave propagation coordinates as given by Eq. (1.198). To calculate the associated consistent load vector of the member the R-wave ground displacements will be transformed to the member local coordinates. For this purpose, the R-wave propagation coordinates (x r, y r, z r) are defined in the system global coordinates (X, Y, Z), and then transformations are made to obtain ground displacements in the member local coordinates. The R-wave propagates in the x r direction making an angle φ r from the global X axis as shown in Fig. 1.25 assuming that the ground surface is on the (X, Y) plane and the Z axis is in upward position. The absolute ground displacements and rotations in the global coordinates,{u GR} a and {θ GR} a , can be expressed as:
where [t R] is the transformation matrix defined from Fig. 1.25 as:
Next step is to transform these displacement and rotation vectors to the member local coordinates, in which they are denoted by {u R} a and {θ R} a . Using Eqs. (1.91) and (1.199a) these vectors are written:
In Eq. (1.200), the transformation matrix [t] is given by Eq. (1.98a). With these definitions the absolute ground deformation vector can be stated:
where the transformation matrix [T R] is defined:
In the earthquake analysis, structural deformations are defined as being relative to the ground surface so that absolute deformations of the structure consist of rigid body motion of the ground surface and the relative structural deformations. For the consistency, the ground deformation vector {u g} in the load vector \( \{ q_{\text{g}} \}^{*} \) must also be defined relative to the ground surface as written:
This vector of relative ground deformations is stated explicitly as:
where the transformation matrix [T R] is defined in Eq. (1.201b). In the load vector \( \{ q_{\text{g}} \}^{*} , \) the derivatives of {u g} are calculated from Eq. (1.203). Having introduced these derivatives into Eq. (1.176c) the load vector becomes:
in which \( \left[ {k_{\text{s}} } \right]^{*} ,\,[L]^{*} ,\,\left[ {L_{\alpha } } \right] \) and \( \left[ {G_{\text{s}} } \right]^{*} \) are defined, respectively in Eqs. (1.170a), (1.175c), (1.174b) and (1.170b). Since the wave number k is a small quantity, the second and third terms in Eq. (1.204) will be small and may be neglected. Having introduced Eq. (1.203) into Eq. (1.204) the load vector \( \left\{ {q_{\text{g}} } \right\}^{*} \) in the member local coordinates can be stated as:
in which the vector \( \left\{ {H_{\text{g}} \left( {x_{\text{r}} ,z_{\text{r}} } \right)} \right\}^{*} \) is a function of the R-wave propagation coordinates x r and z r. Due to transformations, these coordinates will depend on the member axial coordinate x, which is the variable of shape functions of the member. Having carried out these transformations the coordinates of R-wave propagation can be obtained in terms of member axial coordinate x as written:
in which (X 1, Y 1, Z 1) are the global coordinates of the member end (1) shown in Fig. 1.6, (c x , c y , c z ) are the cosine directions of the member axis as defined in Eq. (1.93). By using Eq. (1.205) in Eq. (1.179a) the complex consistent load vector \( \left\{ {p_{\text{g}} } \right\}^{*} \) due to ground deformations under the R-wave propagation can be expressed as:
The vector \( \left\{ {H_{\text{gp}} } \right\}^{*} \) is numerically calculated using the shape functions matrix [N] from Eq. (1.177), \( \left\{ {H_{\text{g}} \left( {x_{\text{r}} ,z_{\text{r}} } \right)} \right\}^{*} \) from Eq. (1.203), and x r and z r from Eq. (1.206). With the calculation of the consistent load vector due to ground deformation, the interface element for the soil–beam interaction is fully determined since the stiffness and damping matrices introduced by the soil have been already explained as presented in Eq. (1.183). So far, at element level, major ingredients are explained to make static and dynamic analyses of a structural system. Since the static analysis is straightforward, attention is paid further to the dynamic analysis. As being preliminary to dynamic response analysis, calculation of natural frequencies and mode shapes of a structural system is outlined in the following section.

R-wave propagation with respect to global coordinates (X, Y, Z)
1.6 Calculation of Natural Frequencies and Mode Shapes, Eigenvalue Solution
Natural frequencies and mode shapes of structures are important characteristics in structural vibrations. To make a safe design under dynamic excitations, it is useful to know these characteristics to prevent resonance conditions or peak responses, which occur if natural frequencies are at the close proximity of fundamental frequency of an excitation phenomenon, such as earthquakes, waves, and winds. In practice, excitation phenomena are uncontrollable. But, knowing their frequency ranges from recorded or observed data of occurrences is helpful information for designers, such that they can manage a structural design with natural frequencies far away from the excitation frequency region. The natural mode shapes are also important measures of responses since they contribute to response displacements of structural systems under a dynamic loading. The natural frequencies and mode shapes are undamped free vibration characteristics of structures and independent of applied loads. They are calculated from the solution of eigenvalue problems that obtained from free vibrations of structures without damping as explained in this section.
The dynamic equilibrium equation of a structural system is given by Eq. (1.86). For free undamped vibration this equation can be stated:
The stiffness matrix [K] and mass matrix [M] of the system are obtained from the assembly process of elements, and the mass matrix also includes concentrated masses applied at some joints of the structure. The solution of Eq. (1.208) suggests a harmonic displacement vector with respect to time t and a vector, say {ϕ}, which is a function of coordinates only. Thus,
Having introduced {D(t)} from Eq. (1.209) into Eq. (1.208) it is obtained that
which is a general eigenvalue problem [58] with symmetrical matrices [K] and [M]. Here, ω is a natural frequency and {ϕ} is the corresponding eigenmode vector. The frequency ω and eigenmode vector {ϕ} are not independent and they correspond to each other, i.e., for the natural frequency ω k the eigenmode vector will be {ϕ} k . and vice versa. The number of eigenmodes of a structural system is equal to the number DOF, each of which satisfies the eigenvalue problem given by Eq. (1.210). There are some properties of eigenmode vectors that used in the response calculation as presented here. For this purpose, let us consider two eigenmodes as k and r so that
We multiply the first one by the transpose of eigenmode vector {ϕ} r , to obtain:
Having stated the terms of [K] and [M] in terms of other at a time by using Eq. (1.211) and the symmetry property of [K] and [M], and inserted it into Eq. (1.212) the following equations are obtained.
Since natural frequencies ω k and ω r are not zero, for unequal eigenmodes k and r, i.e., \( \left( {\omega_{k} \ne \omega_{r} } \right), \) the only conditions to satisfy Eq. (1.213a) are:
These conditions of eigenmodes are known as the orthogonality properties and play very important role in the response calculation. These properties are also valid for orthogonal eigenmodes (free vibrations in perpendicular directions occurring with symmetrical structures) with equal frequencies \( \left( {\omega_{k} = \omega_{r} } \right). \) If the two eigenmodes are same, i.e., (k = r), and thus \( \left( {\{ \phi \}_{k} = \{ \phi \}_{r} } \right), \) Eq. (1.213b) becomes:
Here m r and k r are the measures of the mass and stiffness of an equivalent vibration system with a single degree of freedom. These quantities are known as the modal mass and stiffness, or more commonly the generalized mass and stiffness, which are also used in this book. Their quantities depend on amplitudes of eigenmodes. In practice, it is customary to specify the largest element of an eigenmode to equal one and, by scaling, adjust the remaining elements accordingly. This is known as the normalization process and the resulting vectors are known as the normal, or normalized, eigenmodes, which are called just eigenmodes henceforth in this book. Sometimes, the normalization process is carried out such that (m r = 1) or (k r = 1). In this book, the normalization process with the largest element equal to one is used. In order to find natural frequencies and mode shapes the eigenvalue problem given by Eq. (1.210) must be solved. A simplest one is to use the Rayleigh quotient to calculate approximate natural frequency, which derived from Eq. (1.212). When the eigenmodes k and r are the same, it is expressed that
In the light of this expression, for a an arbitrary vector {X}, the natural frequency is approximated from,
It can be shown [95] that \( \left( {\omega_{1}^{2} \le \omega^{2} \le \omega_{q}^{2} } \right). \) If we vary the vector {X} the minimum of ω 2 will be obtained as \( \omega_{1}^{2} \) with the eigenvector {ϕ}1. The following section presents a brief review of solutions and most commonly used methods.
1.6.1 Eigenvalue Solution
Natural frequencies and mode shapes of structural systems are very important characteristics in the dynamic analysis. In practice, the dynamic analysis is usually carried out by using contributions of a few dominant natural modes so that solution of the structural eigenvalue problem is required. The algebraic eigenvalue problems and their solutions were studied for a long time and the solution algorithms were reported in general in many books, see e.g., [92–94]. Some of well-known solution methods, such as QR, Jacobi and Housholder transformation methods [95], deal with calculating all eigenpairs which may be time consuming for large structural systems. From the engineering point of view, only a limited number of dominant eigenpairs are needed in practice so that solution methods which calculate a limited number of dominant eigenpairs are more attractive than other methods. In practice, the inverse iteration (power method), the subspace iteration [95] and the Lanczos algorithm [96] are well-known and largely used to calculate a limited number of eigenpairs. In order to calculate higher eigenpairs by the inverse iteration method a matrix deflation process, or the Gram–Schmidt orthogonalization [95], must be used while the subspace iteration method and the Lanczos algorithm can directly calculate the required number of eigenpairs. The inverse and the subspace iterations are known as numerically stable and the Lanczos algorithm displays a poor stability although its computational performance is rather good [96]. The subspace iteration method can converge in a few steps if the initial start vectors are properly estimated. It is, therefore, said that the method is powerful. If, however, the initial start vectors are poorly conditioned, extra iteration steps need to be carried out. This operation slows down the computation performance considerably, because the Rayleigh–Ritz procedure [58] is applied in each iteration step which may be time consuming. This drawback can be overcome by disregarding some of the Ritz procedure from certain iteration steps and obtaining a higher convergence rate [97]. This accelerated technique is equivalent to combining both the standard subspace and the power iteration methods. Since eigenvalue solution algorithms and related programs are available in many libraries for scientific calculations there are not considered further in this book, except for power and subspace iteration algorithms which are outlined in the next sections for the completeness of the book.
1.6.1.1 Power Iteration Method
Power, or vector, iteration method is an effective and powerful eigenvalue solution method to calculate few lowest natural frequencies and mode shapes that are sufficient to obtain acceptable responses. The method is based on the calculation of an algebraic eigenvalue from the power of a matrix, say [A], using the eigenvalue property:
where the power n is a large integer number, {X} is an arbitrary vector and λ is the eigenvalue of the matrix [A]. The arbitrary vector {X} can be stated as a linear combination of the eigenvectors of the matrix [A]:
in which ci and {ϕ} i (i = 1, 2, …, q) are constants and eigenvectors of [A]. Having introduced this vector into the left hand side of Eq. (1.216) and rearranging the equation it can be expressed that
We assume that all eigenvalues are ordered from the biggest to the smallest as written λ 1 > λ 2 > ··· > λ q. It can be seen from Eq. (1.218) that, for a sufficiently large number n, the eigenvalue λ approaches λ 1 and the vector {X} approaches the eigenvector {ϕ}1. This is the basis of the power iteration method with a systematic calculation algorithm. In the structural analysis, the eigenvalue problem is stated from Eq. (1.210) as
The iterative solution of this equation is known as the inverse power method. The iteration is started with an initial guess vector {X}0 of the vibration mode so that
After the vector {X}k+1 is calculated it is normalized to obtain a unit value for the largest element. Then the natural frequency is estimated from the Rayleigh quotient using Eq. (1.215b). Thus, at the end of iteration (k+1), it is:
The iteration continues until a required precision is obtained. At the end of iteration, \( \left( {\omega^{2} } \right)_{q + 1} \) approaches \( \omega_{1}^{2} \) and {X}k+1 approaches the eigenvector {ϕ}1 of the lowest eigenmode.
For the calculation of higher eigenmodes, a sweeping or mass deflation process is used. It is assumed that the first lowest (p − 1) eigenmodes are calculated and we intend to calculate the (p)th eigenmode. For this purpose we use a mass matrix:
in which I denotes a unit matrix and k i is the generalized stiffness for the mode i. Eq. (1.222) is the definition of the deflated mass matrix from which the first (p − 1) eigenvectors are eliminated. Using this mass matrix the power iteration converges to the (p)th eigenvector. The iteration follows with selecting an initial guess vector \( \{ X\}_{0} \) and proceeds similar to Eq. (1.220) as stated:
Having introduced the deflated mass matrix into Eq. (1.223a) the vectors \( \{ Y\}_{k}^{*} \) and {X}k+1 can be written:
For an arbitrary vector {X}, let us calculate the generalized mass, \( m_{p - 1}^{*} : \)
The generalized masses, m x and m ix , and the generalized stiffness k xi are defined as:
After the end of iterations, it is now assume that the vector {X} approaches an eigenvector, say {ϕ} r , i.e., \( \{ X\} \to \{ \phi \}_{r} . \) In this case, from Eqs. (1.224a) and (1.224b) it is seen that
For the eigenmodes (r < p) the generalized mass becomes zero, and thus the power iteration with the inflated mass matrix \( [M]_{p}^{*} \) produces the next lowest eigenmode with \( \left( {m_{p}^{*} = m_{p} } \right). \) Calculation of the eigenvector {ϕ} p follows the iterations given in Eqs. (1.223a, b). The corresponding natural frequency is calculated from the Rayleigh quotient:
where the vector \( \{ Y\}_{k + 1}^{*} \) is calculated from Eq. (1.223b) by using the vector \( \{ X\}_{k + 1} \) instead of \( \{ X\}_{k} . \) The power iteration algorithm is an efficient tool to calculate few lowest natural frequencies and mode shapes of large structural systems. One other powerful method in the eigenvalue solution is the subspace iteration method to calculate a limited number of lowest eigenvalues. Its calculation algorithm is briefly explained in the next section.
1.6.1.2 Subspace Iteration Method
The subspace iteration method is applied to calculate eigenvalues and eigenvectors of matrices as a generalization of the power iteration method explained above. It iterates simultaneously on a number of initial vectors instead of single vector iteration. During the iteration process the orthogonality condition of vectors is used to avoid a linear dependence. The subspace iteration method is an iterative multistep Rayleigh–Ritz procedure which reduces the original eigenvalue problem to that with a limited number of eigenvalues to be calculated. The Rayleigh–Ritz procedure is an approximate method to calculate a limited number of lowest natural frequencies and mode shapes of a general structural eigenvalue problem [95]. In order to explain the Rayleigh–Ritz procedure, the first (q) eigenvectors are denoted by {ϕ}1, {ϕ}2, …, {ϕ} q with corresponding natural frequencies ω 1, ω 2, …, ω q . In the matrix form, these eigenvectors are shown by [Φ] with dimensions of (n × q) where n is the total number of DOF of the structural system and q is the number of natural frequencies to be calculated. This limited number of eigenvectors can be approximated by using the Rayleigh–Ritz procedure [95],
where the matrix [Ψ] with (n × q) dimensions consists of predefined Ritz basis vectors,{Ψ}1, {Ψ}2, …, {Ψ} q and [Z] with (q × q) dimensions consists of Ritz coordinates which will be determined by applying the criterion of using minimum Rayleigh quotients. In the matrix notation, the Rayleigh quotients are written
where [Ω] is a diagonal matrix which contains \( \omega_{i}^{2} \) with (i = 1,2, …, q) and the reduced stiffness and mass matrices with (q × q) dimensions are defined
in which [K] and [M] are the system stiffness and mass matrices, The minimum condition of [Ω] with respect to the Ritz coordinates is obtained from
which is an eigenvalue problem with the stiffness and mass matrices \( \left[ {\bar{K}} \right] \) and \( \left[ {\bar{M}} \right] \) with the natural frequencies, ω 1, ω 2, …, ω q , of the original structural system. As it is seen from Eq. (1.229) the Ritz coordinates are the solution to the eigenvectors stated in Eq. (1.229). The solution of this reduced eigenvalue problem can be easily carried out by using the generalized Jacobi method [95]. Then, the eigenvectors of the original system, {ϕ}1, {ϕ}2, …, {ϕ} q , will be estimated using Eq. (1.227). The Rayleigh–Ritz procedure is a one-step calculation and its precision depends on the choice of the Ritz basis vectors, {Ψ}1, {Ψ}2, …, {Ψ} q , so that it may not always produce acceptable results. In order to obtain more accurate results, the subspace iteration is used as explained in the following.
In the subspace iteration method, the Ritz basis vectors are updated after each iteration step and the iteration continues until a required precision is obtained for all eigenvalues that required. In practice, the start vectors can be estimated from the static analysis under Rayleigh loadings which increase the calculation performances considerably. In the power iteration method, the iteration sequence is stated in Eq. (1.220) as written
in which [X] is the matrix of iteration vectors, {X 1}, {X 2}, …., {X q}. In the subspace iteration method, the algorithm follows the calculation steps:
-
1.
Select a set of initial start vectors, {X 1}0, {X 2}0, …., {X p}0 included in the matrix [X]0, where (p) is a number of iteration vectors [95] defined from p = min. (q + 8, 2q).
-
2.
Calculate the Ritz basis vectors, {Ψ}1, {Ψ}2, …., {Ψ} p in the matrix [Ψ] from the solution of Eq. (1.230) as to be \( \left[ \Uppsi \right]_{k + 1} = [X]_{k + 1} \) for the iteration number k.
-
3.
Calculate the reduced stiffness and mass matrices, \( \left[ {\bar{K}} \right] \) and \( \left[ {\bar{M}} \right], \) with (p × p) dimensions using Eq. (1.228b).
-
4.
Solve the eigenvalue problem given in Eq. (1.229) to calculate the Ritz coordinates [Z] with (p × p) dimensions.
-
5.
Arrange the calculated natural frequencies and eigenvectors, [Z], in ascending order so that ω 1 < ω 2 < ··· < ω p .
-
6.
Estimate the eigenvectors, {ϕ}1, {ϕ}2, …, {ϕ} p in the matrix form [Φ] k for the iteration k using Eq. (1.227).
-
7.
Check for the convergence of the required (the first q) eigenvalues.
-
8.
If the required eigenvalues converge, then stop the iteration. If not, update the start vectors as \( \left[ X \right]_{k} = [\Upphi ]_{k} \) and go to step (2). Repeat this iteration until a required convergence is obtained.
The performance of the subspace iteration method can be considerably increased using accelerated iterations in which some of the Rayleigh–Ritz procedure is omitted from certain iteration steps and obtaining a higher convergence rate [97, 98]. In the following section, the calculation of natural frequencies and mode shapes of structures with some damaged or deteriorated members is presented.
1.6.2 Eigenvalue Solution of Deteriorated Structures
Deterioration of structural components is a time dependent process that constitutes a failure sequence of structures. The deterioration mechanism reduces kinematic connectivity and cross-sectional properties of members, and thus it leads to member resistance deterioration. Deterioration affects dynamic properties of structures that response results can be changed considerably. Formulation of a calculation model for deteriorated members is presented in Sect. 1.3. In this section, the calculation algorithm of natural frequencies and mode shapes of structures with some deteriorated members is presented. For this purpose, the system stiffness matrix is formulated in a decremental form, and accordingly, the mass is redistributed to member ends in a similar manner. The stiffness and mass matrices of deteriorated members, \( [k'] \) and \( [m'], \) are given respectively in Eqs. (1.117b, d). These matrices can be expressed in the form,
where [Δk] is the decremental stiffness matrix and [Δm] is a difference mass matrix due to redistribution of the member mass. From Eqs. (1.117b), (d) they are defined
in which [T] is the connectivity matrix of the deteriorated member given in Eq. (1.117a). The stiffness and mass matrices of the structural system can be stated similar to Eq. (1.231a) as written
where [ΔK] and [ΔM] are obtained from the assembly process of [Δk] and [Δm] of all deteriorated members, which are symbolically shown for a number of deteriorated members (n d) by
Having obtained the system stiffness and mass matrices, \( [K'] \) and \( [M'], \) the eigenvalue problem can be solved to find natural frequencies and mode shapes of a deteriorated structure by using a solution method explained in previous sections. Since only few members in a structural system may be damaged before a complete failure occurs, the decremental stiffness matrix will be relatively small. Using this property, the calculation algorithm of the eigenvalue problem of a damaged structure can be simplified.
Since the eigenvectors of the damaged structure are close to those of the previous state or undamaged structure, the power iteration method will provide an efficient methodology to calculate natural frequencies and mode shapes of the current state of the damaged structure. The algorithm of the power iteration is given in Eq. (1.223b) in general. By considering the deflated mass matrix this iteration algorithm can be written for the damaged structure:
where the prime \( \left( ' \right) \) denotes the damaged structure. The iteration process requires inversion of the stiffness matrix \( [K'] \) which will be carried out approximately using Neumann expansion [99]. From Eq. (1.232) it is written
and the inversion is
where n N is the number of expansion for the approximate inversion. Since the matrix [P] is very small, a few expansion terms are sufficient to produce an acceptable inversion. Having introduced Eq. (1.235b) into Eq. (1.234) it can be stated that
where the vectors \( \{ Z'\}_{k} \) is calculated from
and vector \( \{ Q_{n} \}_{k} \) is defined and calculated from the following recursive relation:
or using [P] from Eq. (1.235a) it s stated that
The iteration is carried out until a required convergence is obtained to calculate natural frequency and mode shape of the damaged structure for the eigenmode p. It is explained step by step below.
The Iteration Steps:
-
1.
Select an initial start vector of the eigenmode (p), which is equal to that of the previous state or undamaged structure, i.e., \( \{ X\}_{0} = \{ \phi \}_{p} . \)
-
2.
Calculate the vector \( \{ Y'\}_{k} \) from Eq. (1.234).
-
3.
Solve Eq. (1.236b) to obtain the vector \( \{ Z'\}_{k} \) and consequently to calculate the vector \( \{ Q_{n} \}_{k} \) from Eq. (1.236d) using the recursive relation.
-
4.
Update the iteration vector to \( \{ X\}_{k + 1} \) using Eq. (1.236a) and normalize it to obtain a unit value at the largest element.
-
5.
Calculate the Rayleigh quotient to estimate the natural frequency from
in which the vector \( \{ Y'\}_{k + 1}^{*} \) is calculated from Eq. (1.234) by using \( \{ X\}_{k + 1} \) instead of \( \{ X\}_{k} . \)
-
6.
Check for convergence. If it converges then stop the iteration. If not, go to step 3 for further iteration with \( \{ Y'\}_{k + 1} \) which is calculated at the step 5.
Since the initial start vector is very close to the eigenvector of the damage structure a few iterations (one or two) may be sufficient to obtain correct eigenvectors. The natural frequencies can be roughly calculated from the Rayleigh quotient using eigenvectors of the undamaged structure. For the eigenmode p, it can be calculated approximately from
where k p and m p are the generalized stiffness and mass of the undamaged structure for the eigenmode p while ω p is the natural frequency. In practice, since the stiffness and mass matrices of the undamaged structure [K] and [M] are available once, only the decremental stiffness and mass matrices [ΔK] and [ΔM] need to be updated for each deterioration state and accordingly the natural frequencies and mode shapes are calculated as explained above. The method presented here is suitable for the reliability analysis and optimization problems and also for the dynamic progressive collapse analysis of structures, since the solution uses the original or previous state stiffness and mass matrices. Having determined the natural frequencies and mode shapes the dynamic response analysis of structures are presented briefly in the following section.
1.7 Dynamic Response Analysis
Structures are frequently subjected to time dependent loading histories known as dynamic loading, which produce responses being also time dependent. Excitations of dynamic loading may be continues, which occur with e.g., sea waves for offshore structures, winds for onshore and offshore structures, traffics for bridges and viaducts, or may be periodic and random occurrences such as earthquakes, impacts, and other natural phenomena that may cause catastrophic results. To prevent such undesirable consequences, structures must be designed to withstand dynamic loadings. The design requirement demands knowledge on dynamic response histories or characteristics that is achieved by the solution of the dynamic equilibrium equation of the structural system, which is given by Eq. (1.86) as rewritten
There are different solution methods of this linear differential equation being either in the time or frequency domain. In this section, most commonly used methods will be outlined.
1.7.1 Time-Domain Solution
In the determination of a dynamic response history, time-domain solution algorithms using direct numerical integration are general methods since they can also be applied to the solution of nonlinear problems. Most commonly used direct numerical integration methods in the practice are the central difference, Houbolt, Newmark-β, Wilson-θ methods [95, 100, 101]. However, since only few natural modes are participated in the response calculation of dynamically sensitive structures, the mode superposition method becomes more attractive and efficient in the response calculation. These methods are explained in the following sections.
1.7.1.1 The Central Difference Method
The central difference method is one of the most widely used among numerical integration methods in structural dynamics. The central difference method has the highest accuracy and maximum stability limit [100]. However, its disadvantage is the requirement of small time steps. The central difference method is based on the central difference formulas
where (t − Δt), t, and (t + Δt) are three successive time levels. The displacement solution at time (t + Δt) is obtained by considering the discrete equation at time t. Substituting \( \left\{ {\ddot{D}} \right\}_{t} \) and \( \left\{ {\dot{D}} \right\}_{t} \) from Eq. (1.240) into Eq. (1.239) and rearranging the terms, the displacement vector at the time (t + Δt) can be obtained from the solution of the equation
where \( \left[ {\tilde{K}} \right] \) and \( \left\{ {\tilde{P}} \right\}_{t} \) are effective stiffness matrix and load vector defined as
The solution algorithm starts with the initial values of displacements, velocities and accelerations at time (t = 0) to calculate displacements at time (t + Δt) in which displacements at time (t = −Δt) are also required. Using Eq. (1.240) they are calculated from, for (t = 0),
1.7.1.1.1 The Solution Algorithm
-
1.
Select initial values of the displacements, velocities and accelerations as {D}0, \( \left\{ {\dot{D}} \right\}_{0} \) and \( \left\{ {\ddot{D}} \right\}_{0} , \) and the time step Δt such that \( \Updelta t\, < \,\Updelta t_{\text{cr}} , \) where Δt cr is the critical time step [95].
-
2.
Calculate the displacement vector \( \left\{ D \right\}_{ - \Updelta t} \) from Eq. (1.242) at (t = 0).
-
3.
Calculate the effective stiffness matrix and load vector, \( \left[ {\tilde{K}} \right] \) and \( \left\{ {\tilde{P}} \right\}_{t} , \) from Eq. (1.241b).
-
4.
Calculate the displacement vector \( \left\{ D \right\}_{t + \Updelta t} \) from Eq. (1.241a).
-
5.
If required, calculate acceleration and velocity vectors at time t from Eq. (1.240).
-
6.
Go to step (3) to repeat the process for the next time station until the maximum time station is reached, i.e., \( (t \le t_{ \max } ). \)
Since the effective stiffness matrix \( \left[ {\tilde{K}} \right] \) does not contain the stiffness matrix [K] the central difference method is called as explicit integration method [100], and it is very efficient for diagonal mass and damping matrices. Because, in this case, solutions of simultaneous linear equations are not required at time stations. If, however, the damping matrix [C] is proportional to the mass matrix [M] only, then this method remains still efficient since the decomposition of the mass matrix is performed only once to solve the simultaneous linear equations for all time stations.
1.7.1.2 The Houbolt Method
This method uses standard finite difference expressions to approximate velocity and acceleration vectors in terms of the displacement vectors. The Houbolt method is based on fitting a cubic polynomial through values of the current displacement vector, which is to be calculated, and the three previously calculated displacement vectors. Having taken the first and second time derivatives of this polynomial at the current time station, the following finite difference expressions of the velocity and acceleration vectors are obtained.
Now, introducing these statements in the equilibrium equation from Eq. (1.239) at time (t + Δt) it is obtained that
where the effective stiffness matrix and load vector, \( \left[ {\tilde{K}} \right] \) and \( \left\{ {\tilde{P}} \right\}_{t + \Updelta t} , \) are defined
The solution of this equation at time (t + Δt) requires knowledge of \( \left\{ D \right\}_{t} ,\,\left\{ D \right\}_{t - \Updelta t} \) and \( \left\{ D \right\}_{t - 2\Updelta t} \) so that a special starting procedure is essential. For this purpose, one other numerical integration method, e.g., the central difference method, can be used to calculate displacement vectors at a couple of initial time stations, i.e., at (t = Δt) and (t = 2Δt), with the initial values of {D}0, \( \left\{ {\dot{D}} \right\}_{0} \) and \( \left\{ {\ddot{D}} \right\}_{0} \) at (t = 0). Then, the Houbolt integration procedure is applied to calculate displacements at time stations (t = 3Δt) and forth by using a calculation algorithm similar to that of the central difference method with the effective stiffness matrix and load vector given in Eq. (1.244b). Because of appearance of the stiffness matrix [K] in the effective stiffness matrix \( \left[ {\tilde{K}} \right], \) the solution of linear simultaneous equations at each time station requires decomposition process, and therefore the Houbolt method is said to be implicit. It is an unconditionally stable, efficient, and practical method for the numerical integration of the dynamic equilibrium equation.
1.7.1.3 The Newmark-β method
To solve the dynamic equilibrium equation of structures the most widely used implicit method of direct time integration is the Newmark-β method. The Newmark-β method is based on the assumption of linear acceleration within each time step. In this method, the following assumptions are used.
where β and α are integration parameters, which determine the stability and accuracy of the algorithm. For (β = l/2) and (α = l/6), the relations in Eq. (1.245) correspond to the linear acceleration method. Newmark had originally proposed an unconditionally stable algorithm with constant acceleration over the time step Δt [95], which is equal to the average of the accelerations at the ends of the time step. In this case, the corresponding parameters become (β = l/2) and (α = l/4). In addition to the relations given in Eq. (1.245), the dynamic equilibrium equation given by Eq. (1.239) must also be satisfied at time station (t + Δt). The acceleration and displacement vectors at time station (t + Δt) are calculated from Eq. (1.245) as
Having introduced these vectors into the dynamic equilibrium equation in Eq. (1.239) at time station (t + Δt), the following simultaneous linear equations can be obtained.
where the effective stiffness matrix and load vector, \( \left[ {\tilde{K}} \right] \) and \( \left\{ {\tilde{P}} \right\}_{t + \Updelta t} , \) are defined
The step by step solution procedure starts at time (t = 0) with initial conditions, {D}0, \( \left\{ {\dot{D}} \right\}_{0} \) and \( \left\{ {\ddot{D}} \right\}_{0} , \) and selecting the time step Δt, the parameters β and α such that \( \left( {\beta \ge 0.5} \right) \) and \( \left( {\alpha \ge 0.25\left( {0.5 + \beta } \right)^{2} } \right) \) for unconditional stability [95, 101]. With these initial set up the effective stiffness matrix and load vector are calculated from Eq. (1.247b), and using Eq. (1.247a) the displacement vector \( \left\{ D \right\}_{t + \Updelta t} \) at time station (t + Δt) is calculated.
1.7.1.4 The Wilson-θ Method
To solve the dynamic equilibrium equation of structures, the Wilson-θ method is also recognized as being widely used implicit method of time integration. The Wilson-θ method is similar to the Newmark-β method in the sense that it is based on a linear acceleration over the time interval (θΔt), where \( \left( {\theta \ge 1.0} \right). \) If \( \left( {\theta = 1} \right), \) then the method reduces to the linear acceleration method with conditional stability. In linear problems, the Wilson-θ method becomes unconditionally stable for \( \left( {\theta \ge 1.37} \right) \) [95, 101] so that \( \left( {\theta = 1.40} \right) \) is usually applied in practice. For any time τ in the interval (θΔt), by using the assumption of linear acceleration, the acceleration vector \( \left\{ {\ddot{D}} \right\}_{t + \tau } \) can be obtained as written
The velocity and displacement vectors at time τ are obtained from integrations of \( \left\{ {\ddot{D}} \right\}_{t + \tau } . \) Using boundary conditions at \( \left( {\tau = 0} \right) \) it can be obtained that
At time \( \left( {\tau = \theta \Updelta t} \right) \) these velocity and acceleration vectors will be
from which the velocity and acceleration vectors at time \( \left( {t + \theta \Updelta t} \right) \) are determined in terms of \( \left\{ D \right\}_{t + \theta \Updelta t} \) as written
In order to apply the dynamic equilibrium equation at time \( \left( {t + \theta \Updelta t} \right) \) to solve the displacement vector \( \left\{ D \right\}_{t + \theta \Updelta t} \) the load vector must also be determined at time \( \left( {t + \theta \Updelta t} \right). \) For this purpose, a linear distribution of the load vector in the time interval (θΔt) is assumed and using extrapolation the following expression can be obtained.
Having introduced Eqs. (1.250a, b) into the dynamic equilibrium equation the displacement vector \( \left\{ D \right\}_{t + \theta \Updelta t} \) can be calculated from
where the effective stiffness matrix and load vector, \( \left[ {\tilde{K}} \right] \) and \( \left\{ {\tilde{P}} \right\}_{t + \theta \Updelta t} , \) are defined as written
The solution algorithm at time (t + Δt) is explained step by step in the following.
The solution algorithm:
-
1.
Set initial values of the displacements, velocities and accelerations at (t = 0) as {D}0, \( \left\{ {\dot{D}} \right\}_{0} \) and \( \left\{ {\ddot{D}} \right\}_{0} , \) the time step Δt, and choose (θ = 1.4).
-
2.
Calculate the effective stiffness matrix and load vector from Eq. (1.251b).
-
3.
Calculate the displacement vector \( \left\{ D \right\}_{t + \theta \Updelta t} \) from Eq. (1.251a).
-
4.
Calculate the velocity and acceleration vectors, \( \left\{ {\dot{D}} \right\}_{t + \theta \Updelta t} \) and \( \left\{ {\ddot{D}} \right\}_{t + \theta \Updelta t} \) from Eq. (1.250a).
-
5.
Calculate the acceleration vector \( \left\{ {\ddot{D}} \right\}_{t + \Updelta t} \) from Eq. (1.248a), the velocity and displacement vectors, \( \left\{ {\dot{D}} \right\}_{t + \Updelta t} \) and \( \left\{ {\ddot{D}} \right\}_{t + \Updelta t} , \) from Eq. (1.248b) at time station (t + Δt), i.e., for (τ = Δt).
The Wilson-θ method is considered to be the best available unconditionally stable method and is popular in earthquake engineering studies [101]. Its drawback is to be not suitable for problems involving impact or sudden applied loads since it overestimates significantly the exact solution at the first few time stations when large time steps are used.
1.7.1.5 The Mode Superposition Method
When structures are subjected to strong dynamic excitations, corresponding responses become highly dynamic and static response contributions will be of minor importance. Such structural system is defined as dynamic sensitive and its response behavior will be dynamic dominant. For dynamic sensitive structures, the mode superposition method is the most efficient and powerful method applied to determine linear responses of structural systems. The mode superposition method is based on participations of natural mode shapes to the displacements with some scalar time functions to be determined. Thus, the displacement vector {D(t)} is expressed as
where z j (t) is a time dependent participation factor, which is known as the generalized displacement for the eigenmode j, q is the number eigenmodes to be included and {ϕ} j is the corresponding eigenvector. For dynamic sensitive structures, only few eigenmodes are sufficient to obtain correct results. If static responses are also considerable, then more eigenmodes must be included in Eq. (1.252). The exact results are obtained when all eigenmodes are included, even in the quasi-static response calculation. Having substituted Eq. (1.252) into the dynamic equilibrium equation written in Eq. (1.239) it is stated that
Having multiplied this statement by \( \{ \phi \}_{j}^{T} \) and taking into account the orthogonality conditions, the linear equations can be decoupled as written, for the egenmode j,
where k j , c j , m j and f j are respectively the generalized stiffness, damping, mass and force for the mode j. The generalized damping c j can be stated in terms of the generalized mass and the damping ratio \( \xi_{j} \) to the critical [102, 103], which is \( \left( {c_{j} = 2\xi_{j} \omega_{j} m_{j} } \right). \) By introducing this term into Eq. (1.253b) the differential equation becomes
in which \( \omega_{j} \) is the natural frequency for the eigenmode j. This differential equation can be solved using one of numerical integration methods explained in previous sections. An analytical solution of this equation is also available using the Duhamel integral [57, 59, 103], from which it is obtained that, for \( \left( {0 \le t \le t_{\text{end}} } \right) \) shown in Fig. 1.26,
and, for \( \left( {t_{\text{end}} < t \le t_{ \max } } \right) \) shown in Fig. 1.26, it is
In these statements, \( \dot{z}_{0} \) and z 0 are the initial generalized velocity and displacement at (t = 0), \( \dot{z}_{\text{end}} \) and z end are the generalized velocity and displacement at (t = t end), the parameters β and ω d are respectively a damping term and natural frequency of the damped system which are defined
For a given, or assumed, function of the generalized force f j (t), the generalized displacement z j (t) is calculated from Eqs. (1.255a, b). Having calculated generalized displacements for all eigenmodes included, the system displacement vector is calculated using Eq. (1.252). For linear systems, the mode superposition method is largely used in practice as being the most efficient and powerful calculation tool in dynamic response analysis. For linear structural systems, the dynamic analysis can be better performed in the frequency domain explained in the next section.

Time discretization of the generalized force f j (t), and the integration bound t max
1.7.2 Frequency Domain Solution
In the analysis of dynamic responses of linear structures, the frequency domain solution provides a straightforward procedure and enables application of spectral analysis. It is more effective than the time domain solution for linear structures that the principle of superposition holds. The frequency domain solution is based on Fourier transform method, in which a time function f(t) can be stated in its reciprocal frequency function f(ω). The mutual transformations are written [103] by, for the Fourier transform,
and for the inverse Fourier transform
The displacement and load vectors of a structural system is now expressed using the inverse Fourier transform
Substituting these statements into the dynamic equilibrium equation, given by Eq. (1.239), the following frequency domain equation can be obtained.
from which the displacement vector in the frequency domain is determined as written
where [H(ω)]DP is a matrix of the complex frequency response, which is also known as the structural transfer function matrix between the displacement and load vectors. Eq. (1.259) is the basis of the frequency domain solution. For each variation of the frequency ω, the structural transfer function matrix [H(ω)]DP will be calculated, and consequently, the displacement vector {D(ω)} will be calculated. If the time domain solution is required, then it is calculated from the inverse Fourier transform using Eq. (1.257). For each variation of the frequency ω, the calculation of [H(ω)]DP from Eq. (1.259) is a time consuming process, and therefore it is not desirable. An alternative and effective solution is to use the mode superposition method in the frequency domain. From Eqs. (1.252) and (1.254) the displacements can be written in the frequency domain as
where h j (ω) is the complex frequency response for the eigenmode j, which is obtained to be
These formulations correspond to the standard mode superposition method. In order to increase the efficiency of the method, by including only a couple of eigenmodes even in the case of quasi-static response calculation, we modify this standard mode superposition method. To understand the modification, we express Eq. (1.260a) in a different way. By substituting the generalized force \( \left( {f_{j} (\omega ) = \{ \phi \}_{j}^{T} \{ P(\omega )\} } \right) \) into Eq. (1.260a) it can be stated that
From the comparison of Eqs. (1.261) and (1.259) it can be written
which is satisfied if all eigenmodes are included, i.e., (q = n). This statement can be expressed in two terms as being the quasi-static and pure dynamic contributions with the participations of few eigenmodes as
in which the dynamic participation factor α j (ω) will be determined from the criterion of a matrix inversion, i.e., the product of a matrix by its inverse produces a unit matrix. Thus, from Eq. (1.262b) it is imposed as,
Having multiplied this statement by [K] from left and by \( \{ \phi \}_{j} \) from right, and then by \( \{ \phi \}_{j}^{T} \) from left it is obtained that
from which the eigenmode participation factor α j (ω) is determined as written
This complex scalar function is stated in terms of the real and imaginary parts as
where \( \text{Re}\;\alpha_{j} (\omega ) \) and \( \text{Im}\;\alpha_{j} (\omega ) \) are respectively the real and imaginary parts which are defined below as being functions of the frequency ratio (ω/ω j ).
Plots of these functions are shown in Fig. 1.27. As it is realized from this figure the dynamic response contribution is effective only in the frequency regions around natural frequencies, i.e., around (x = 1) at which (ω = ω j ). In the regions far from natural frequencies, the static response contribution dominates the total response, which is calculated from the equation,
in which the quasi-static contribution is explicitly included. Therefore, it is subtracted from contributions of eigenmodes in the standard mode superposition method as it can be seen from Eq. (1.264a). This modified mode superposition method is more general than the standard mode superposition method since it includes the complete quasi-static contribution and additionally pure dynamic modal contributions. This method will be used further in this book.

Modal participation factor α j (ω) multiplied by k j for the damping ratio of (ξ j = 0.04)
1.8 Examples
In this section two examples are presented to demonstrate partly connected members of an example portal space frame, and the static and eigenvalue analyses of an example 2D offshore jacket structure under harmonic wave loading. A simple beam problem is also provided for a hand calculation exercise.
1.8.1 Example of a Portal Frame
In order to demonstrate member releases and partly connected members, which are explained in the Sect. 1.3, an example simple portal frame is analyzed by using the computer program SAPOS [104]. The topology, loadings, and partial connections are shown in Fig. 1.28. The frame is assumed to be reinforced concrete with rectangle member cross-sections. The member dimensions and material properties are given in Table 1.1. For rectangular cross-sections the effective areas of shear forces, A y and A z , and the torsional constant J are calculated from [56, 105],
The partial connection data of members (spring coefficients and connectivity ratios) are given in Table 1.2. The connectivity ratios are defined as
where i a degree of freedom of the member, r i and k ii are the spring coefficient and diagonal term of the member stiffness matrix for the ith degree of freedom. A zero connectivity ratio means that member is fully released in the related direction and (μ i = 1.0) indicates a rigid (fixed) connection. The member forces calculated for the rigid and partial connections are presented, respectively in Tables 1.3 and 1.4 whereas corresponding deformations are shown in Fig. 1.29.

An example portal frame, partial connections, and topological and loading data

Deformations of the example portal frame. a Deformation with rigid member connections. b Deformation with partial member connections
1.8.2 Example of 2D Offshore Jacket Structure
The second example is a 2D offshore jacket structure. Static analysis of the structure under harmonic wave loading and eigenvalue solution is carried out using the SAPOS program [104]. The structure is made of tubular steel members and connected on tubular piles in the soil as shown in Fig. 1.30. The underlying soil is modeled as to be of Winkler type consisting of two layers with different characteristics as shown in Fig. 1.30, where joint numbers and geometrical data are also shown. The soil moduli are given in Table 1.5 whereas member dimensions, material properties, and mass of deck are given in Table 1.6. For tubular members, the effective areas of shear forces, A y and A z , and the torsional constant J are calculated [105] from,
where D o and D i are respectively outer and inner diameters of the tubular cross-section. The detail of wave load calculation will be presented in Chap. 3. For the wave data given in Table 1.7 the calculated wave loads at joints in the global directions are presented in Table 1.8. The calculated member forces of the legs on the left hand side are written in Table 1.9 and the deformation of the structure is shown in Fig. 1.31a. The lowest three natural frequencies and eigenvectors are calculated and the natural frequencies are given in Table 1.10. The first and third eigenmode shapes are found to be flexural and the second one is in the vertical vibration. The first eigenmode shape is shown in Fig. 1.31b.

An example 2D jacket structure, joint numbers, and geometrical data

Deformation under wave loading and the first eigenmode shape of the 2D jacket. a Deformation under static wave loading b First eigenmode shape
1.8.3 A Simple Beam for Exercise
In Fig. 1.32 , a simple beam with partly connected members is given. It is assumed to be a Euler–Bernoulli beam. The joint and member numbers, and all other data necessary for the hand calculation are written in the figure. The beam is free in the (x–z) plane and fixed in the (x–y) plane. It has the same rigidity as EI y in all parts. Joint displacements and member-end forces are asked to be calculated by using:

A partly connected simple beam for exercise
-
1.
Differential equations of beams and corresponding boundary conditions.
-
2.
FE calculation with partly connected members, explained in the Sect. 1.3.
-
3.
Standard FE calculation with extra spring members at joints 2 and 3.
References
Rutenbwg A (1979) Plane frame analysis of laterally loaded asymmetric buildings-an uncoupled solution. Comp Struct 10(3):553–555
Wilkinson S, Thambiratnam D (2001) Simplified procedure for seismic analysis of asymmetric buildings. Comp Struct 79(32):2833–2845
Kam TY, Lee FS (1986) Nonlinear analysis of steel plane frames with initial imperfections. Comp Struct 23(4):553–557
Sophianopoulos DS (2003) The effect of joint flexibility on the free elastic vibration characteristics of steel plane frames. J Constr Steel Res 59(8):995–1008
Blandford GE (1988) Static analysis of flexibly connected thin-walled plane frames. Comp Struct 28(1):105–113
Dissanayake UI, Burgess IW, Davison JB (2000) Modelling of plane composite frames in unpropped construction. Eng Struct 22(4):287–303
Sekulovic M, Salatic R, Nefovska M (2002) Dynamic analysis of steel frames with flexible connections. Comp Struct 80(11):935–955
Lui EM, Chen WF (1986) Analysis and behaviour of flexibly-jointed frames. Eng Struct 8(2):107–118
Lee HP, Ng TY (1994) In-plane vibration of planar frame structures. J Sound Vib 172(3):420–427
Labuschagne A, van Rensburg NFJ, van der Merwe AJ (2009) Comparison of linear beam theories. J Math Comput Modell 49(1–2):20–30
The LH (2004) Beam element verification for 3D elastic steel frame analysis. Comput Struct 82(15–16):1167–1179
Kim SE, Kim Y, Choi SH (2001) Nonlinear analysis of 3-D steel frames. Thin Walled Struct 39(6):445–461
Kumar P, Nukala VV, White DW (2004) A mixed finite element for three-dimensional nonlinear analysis of steel frames. Comput Meth Appl Mech Eng 193(23–26):2507–2545
Yang YB (1993) Recent researches on buckling of framed structures and curved beams. J Constr Steel Res 26(2–3):193–210
Palaninathan R, Chandrasekharan PS (1985) Curved beam element stiffness matrix formulation. Comput Struct 21(4):663–669
Choit J, Lim J (1995) General curved beam elements based on the assumed strain fields. Comput Struct 55(3):379–386
Yang SY, Sin HC (1995) Curvature-based beam elements for the analysis of Timoshenko and shear-deformable curved beams. J Sound Vib 187(4):569–584
Culver CG, Oestel DJ (1969) Natural frequencies of multispan curved beams. J Sound Vib 10(3):380–389
Yoona KY, Parkb NH, Choic YJ, Kangd YJ (2006) Natural frequencies of thin-walled curved beams. Finite Elem Anal Des 42(13):1176–1186
Dym CL, Shames IH (1973) Solid mechanics: a variational approach. McGraw·Hill, New York, pp 175–213
Boresi AP, Schmidt RJ (2003) Advanced mechanics of materials, 6th edn. Wiley, New York
Case J, Chilver L, Ross CTF (1999) Strength of materials and structures, 4th edn. Elsevier, Amsterdam
Love AEH (1963) A treatise on the mathematical theory of elasticity, 4th edn. Cambridge University Press, New York
Timoshenko SP, Goodier JN (1969) Theory of elasticity, 3rd edn. McGraw-Hill, NewYork
Ruge P, Birk C (2007) A comparison of infinite Timoshenko and Euler-Bernoulli beam models on Winkler foundation in the frequency- and time-domain. J Sound Vib 304(3–5):932–947
Ganesan N, Engels RC (1992) Hierarchical Bernoulli-Euler beam finite elements. Comput Struct 43(2):297–304
Timoshenko SP (1921) On the correction for shear of the differential equation for transverse vibrations of prismatic bars. Philos Mag 41(245):744–746
Timoshenko SP (1922) On the transverse vibrations of bars of uniform cross-section. Philos Mag 43(253):125–131
Wang CM (1995) Timoshenko beam-bending solutions in terms of Euler–Bernoulli solutions. J Eng Mech 121(6):763–765
Davis R, Henshell RD, Warburton GB (1972) A Timoshenko beam element. J Sound Vib 22(4):475–487
Bakr EM, Shabana AA (1987) Timoshenko beams and flexible multibody system dynamics. J Sound Vib 116(1):89–107
Thomas DL, Wilson JM, Wilson RR (1973) Timoshenko beam finite elements. J Sound Vib 31(3):315–330
Horr AM, Schmidt LC (1995) Closed-form solution for the Timoshenko beam theory using a computer-based mathematical package. Comput Struct 55(3):405–412
Bazoune A, Khulief YA, Stephen NG (2003) Shape functions of three-dimensional Timoshenko beam element. J Sound Vib 259(2):473–480
Lou P, Dai GL, Zeng QY (2006) Finite-element analysis for a Timoshenko beam subjected to a moving mass. Proc Inst Mech Eng Part C J Mech Eng Sci 220(5):669–678
Yu W, Hodges DH (2005) Generalized Timoshenko theory of the variational asymptotic beam sectional analysis. J Am Helicopter Soc 50(1):46–55
Mikkola A, Dmitrochenko O, Matikainen M (2009) Inclusion of transverse shear deformation in a beam element based on the absolute nodal coordinate formulation. J Comput Nonlinear Dyn 4(1):011004–011012
Ghali A, Neville AM, Brown TG (2009) Structural analysis: a unified classical and matrix approach, 6th edn. Spon, London
McCormac CJ (2007) Structural analysis: using classical and matrix methods, 4th edn. Wiley, Hoboken
Kurrer KE (2008) The history of the theory of structures: from arch analysis to computational mechanics. Ernst & Sohn, Berlin
Przemieniecki JS (1968) Theory of matrix structural analysis. McGraw-Hill, New York
Zienkiewicz OC, Taylor RL (2005) The finite element method for solid and structural mechanics, 6th edn. Elsevier Butterworth-Heinemann, Oxford
Crisfield MA (1986) Finite elements and solution procedures for structural analysis: linear analysis, vol 1. Pineridge Press, Swansea
Wunderlich W, Pilkey WD (2003) Mechanics of structures: variational and computational methods, 2nd edn. CRC Press, Boca Raton
Slivker VI (2007) Mechanics of structural elements: theory and applications. Springer, Berlin
Brenner SC, Scott LR (2008) The mathematical theory of finite element methods, 3rd edn. Springer, New York
Chen Z (2005) Finite element methods and their applications. Springer, Berlin
Ross CTF (1999) Advanced finite element methods. Horwood, Chichester
Bathe KJ, Wilson EL (1976) Numerical methods in finite element analysis. Prentice-Hall, Englewood
Omid BN, Rankin CC (1991) Finite rotation analysis and consistent linearization using projectors. Comput Meth Appl Mech Eng 93(3):353–384
Ibrahimbegovic A (1997) On the choice of finite rotation parameters. Comput Meth Appl Mech Eng 149:49–71
Li M (1998) The finite deformation theory for beam, plate and shell Part III. The three-dimensional beam theory and the FE formulation. Comput Meth Appl Mech Eng 162(1–4):287–300
Kim MY, Chang SP, Park HG (2001) Spatial postbuckling analysis of nonsymmetric thin-walled frames. I: theoretical considerations based on semitangential property. J Eng Mech 127(8):769–778
Boresi AP, Chong KP (2000) Elasticity in engineering mechanics. Wiley, New York
Schramm U, Kitis L, Kang W, Pilkey WD (1994) On the shear deformation coefficient in beam theory. Finite Elem Anal Des 16:141–162
Pilkey WD (2002) Analysis and design of elastic beams, computational methods. Wiley, New York
Clough RW, Penzien J (1993) Dynamics of structures, 2nd edn. McGraw-Hill, New York
Bishop RED, Gladwell GML, Michaelson S (1965) The matrix analysis of vibration. Cambridge University Press, London
Meirovitch L (1967) Analytical methods in vibrations. Collier-McMillan Limited, London
Woodhouse J (1998) Linear damping models for structural vibration. J Sound Vib 215(3):547–569
Liang Z, Lee GC (1991) Representation of damping matrix. J Eng Mech 117(5):1005–1020
Hinton E, Rock T, Zienkiewicz OC (1976) A note on mass lumping and related processes. J Earthq Eng Struct Dyn 4:245–249
Barltrop NDP, Adams AJ (1991) Dynamics of fixed marine structures, 3rd edn. Butterworth-Heinemann Ltd., Oxford, pp 41–48
Chen B, Hu Y, Tan M (1990) Local joint flexibility of tubular joints of offshore structures. Mar Struct 3(3):177–197
Bouwkamp JG, Hollings JP, Malson BF, Row DG (1980) Effect of joint flexibility on the response of offshore structures. Proceedings of the offshore technology conference, Texas, USA
Fessler H, Mockford PB, Webster JJ (1986) Parametric equations for the flexibility matrices of single brace tubular joint in offshore structures. Proc Inst Civ Eng Part 2 81:659–673
Fessler H, Mockford PB, Webster JJ (1986) Parametric equations for the flexibility matrices of multi-brace tubular joint in offshore structures. Proc Inst Civ Eng Part 2 81:675–696
Ueda Y, Rashed SMH, Nakacho K (1987) An improved joint model and equations for flexibility of tubular joints. Proceedings of the 6th international symposium offshore Mechanics and Arctic Engineering, Texas, USA
Lee DG, Song YH (1993) Efficient seismic analysis of piping systems with joint deformations. Eng Struct 15(1):2–12
Hu Y, Chen B, Ma J (1993) An equivalent element representing local flexibility of tubular joints in structural analysis of offshore platforms. Comput Struct 47(6):957–969
Chen TY, Zhang HY (1996) Stress analysis of spatial frames with consideration of local flexibility of multiplanar tubular joint. Eng Struct 18(6):465–471
Karadeniz H (1994) An algorithm for member releases and partly connected members in offshore structural analysis. Proceedings of the 13th international conference on Offshore Mechanics and Arctic Engineering, OMAE-94, Texas, USA, vol 1, pp 471–476
Karadeniz H (2010) A calculation model for deteriorated members of 3D frame structures in the static and dynamic analyses. Proceedings of the 29th international conference on Offshore Mechanics and Arctic Engineering, OMAE-2010, Paper No. OMAE2010-20971, Shanghai, China
Baigent AH, Hancock GJ (1982) Structural analysis of assemblages of thin-walled members. Eng Struct 4:207–216
Faruque MO (1986) Mechanics of material interfaces. In: Selvadurai APS, Voyiadjis GS (eds) An axisymmetric interface element for soil-structure interaction problems. Elsevier, Amsterdam
Boulon M, Garnica P, Vermeer PA (1995) Mechanics of geomaterial interfaces. In: Selvadurai APS, Boulon MJ (eds) Soil-structure interaction: FEM computations. Elsevier, Amsterdam
Selvadurai APS (1995) Mechanics of geomaterial interfaces. In: Selvadurai APS, Boulon MJ (eds) Boundary element modeling of geomaterial interfaces. Elsevier, Amsterdam
Karadeniz H (2001) Earthquake analysis of buried structures and pipelines based on Rayleigh wave propagation. Int J Offshore Polar Eng 11(2):133–140
Miranda C, Nair K (1966) Finite beams on elastic foundation. J Struct Eng 92(ST2):131–141
Selvadurai APS (1979) Elastic analysis of soil-foundation interaction. Elsevier, Amsterdam
Ting BY (1982) Finite beams on elastic foundation with restrains. J Struct Eng 108(ST3):611–621
Ting BY, Mockry EF (1984) Beam on elastic foundation finite element. J Struct Eng 110(10):2324–2339
Aydogan M (1995) Stiffness-matrix formulation of beams with shear effect on elastic foundation. J Struct Eng 121(99):1265–1270
Yokoyama T (1991) Vibrations of Timoshenko beam-columns on two-parameter elastic foundations. Earthquake Eng Struct Dyn 20:353–370
Ishihara K (1996) Soil behaviour in earthquake geotechnics. Oxford University Press, Oxford
Toki K, Sato T, Miura F (1981) Separation and sliding between soil and structure during strong ground motion. Earthquake Eng Struct Dyn 9:263–277
Lay T, Wallace TC (1995) Modern global seismology. Academic Press, London
Takeuchi H, Saito M (1972) Seismic surface waves. In: Bold BA (ed) Methods in computational physics, seismology: surface waves and earth oscillations. Academic Press, London
Achenbach JD (1980) Wave propagation in elastic solids. North-Holland, Amsterdam
Graff KF (1975) Wave motion in elastic solids. Oxford University Press, London
Makris N (1994) Soil-pile interaction during the passage of Rayleigh waves: an analytical solution. Earthq Eng Struct Dyn 23:153–167
Wilkinson JH (1965) The algebraic eigenvalue problem. Clarendon Press, Oxford
Jennings A (1977) Matrix computation for engineers and scientists. Wiley, London
Parlett BN (1980) The symmetric eigenvalue problem. Prentice-Hall, Englewood Cliffs
Bathe KJ, Wilson EL (1976) Finite element procedures in engineering analysis. Prentice-Hall, Englewood Cliffs
Hudges TJR (1987) The finite element method, linear static and dynamic finite element analysis. Prentice-Hall, Englewood Cliffs
Qian Y, Dhatt G (1995) An accelerated subspace method for generalized eigenproblems. Comput Struct 54(6):1127–1134
Karadeniz H (1996) An accelerated solution algorithm for the eigenvalue problem in the offshore structural analysis. Proc of ISOPE-96, 26–31 May, Los-Angeles, USA
Yamazaki F, Shinozuka M, Dasgupta G (1988) Neumann expansion for stochastic finite element analysis. J Eng Mech 114(8):1335–1354
Dokainish MA, Subraraj K (1989) A survey of direct time-integration methods in computational structural dynamics-I: explicit methods. Comput Stuct 32(6):1371–1386
Subraraj K, Dokainish MA (1989) A survey of direct time-integration methods in computational structural dynamics-II: implicit methods. Comput Stuct 32(6):1387–1401
Biggs JM (1964) Introduction to structural dynamics. McGraw-Hill, New York
Humar JL (2002) Dynamics of structures, 2nd edn. Swets & Zeitlinger B.V., Lisse
Karadeniz H (2009) SAPOS, spectral analysis program of structures. Report, Structural Mechanics Division, Faculty of Civil Engineering and Geosciences, Delft University of Technology, Delft, The Netherlands
Young WC, Budynas RG (2002) Roark’s formulas for stress and strain, 7th edn. McGraw-Hill, New York
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Copyright information
© 2013 Springer-Verlag London
About this chapter
Cite this chapter
Karadeniz, H., Saka, M.P., Togan, V. (2013). Finite Element Analysis of Space Frame Structures. In: Stochastic Analysis of Offshore Steel Structures. Springer Series in Reliability Engineering. Springer, London. https://doi.org/10.1007/978-1-84996-190-5_1
Download citation
DOI: https://doi.org/10.1007/978-1-84996-190-5_1
Published:
Publisher Name: Springer, London
Print ISBN: 978-1-84996-189-9
Online ISBN: 978-1-84996-190-5
eBook Packages: EngineeringEngineering (R0)