
Abstract
This paper presents the dynamic properties of the Confederation Bridge extracted by four output-only system identification algorithms applied to vibration monitoring data. The purpose of this study is to evaluate the efficiency and accuracy of different modal identification methods, particularly in the presence of high level of uncertainty and noise related to field measurement data. The modal estimates obtained using these alternative approaches are compared and verified against the modal properties from the finite element model.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Ambient vibration
- Operational modal analysis
- Structural health monitoring
- System identification
- Continuous monitoring
17.1 Introduction
Accurate and timely assessment of maintenance and repair requirements of bridges is important for ensuring public safety and for efficient allocation of limited resources by bridge engineers and transportation authorities. Recently the topic of vibration based structural health monitoring (VBSHM) has attracted considerable interest, which offers the possibility of obtaining more accurate and objective information with respect to the deterioration and damage condition of instrumented structures. The comprehensive monitoring project of the Confederation Bridge in eastern Canada represents a unique opportunity to advance the development of VBSHM techniques for performance assessment because of the availability of long-term continuous monitoring information covering not only the dynamic responses of the structure but also other important variables such as concrete temperatures, material properties, weather data, etc. The comprehensive datasets help to better understand and characterize short and long-term structural behaviour of the bridge. Furthermore, due to its particular location, the bridge is exposed to harsh environmental condition including high wind and moving ice floes as well as wide range of seasonal environmental fluctuations which make it an ideal setting for studying the practical applicability of VBSHM due to high level of uncertainties present in the environmental and loading conditions. Previously, Stochastic Subspace Identification (SSI) method was employed to extract the modal information and verify the expected dynamic behaviour of the bridge under different loading scenarios [1].
The latest development of promising output-only modal identification technique, PolyMAX allows new capabilities in automatic data processing for the estimation of modal parameters due to its ability in providing a clear stabilization diagram of the system poles of the monitored structure.
In this context, this present work is focused on the analysis of the ambient vibration data of the Confederation Bridge with the purpose of obtaining insights on the accuracy and efficiency of four different identification methods: the Frequency Domain Decomposition (FDD) [2], Eigensystem Realization Algorithm [3], SSI [4] and PolyMAX [5] methods. FDD, ERA and PolyMAX methods have been added to the existing Confederation Bridge monitoring software platform, Signal Processing PLatform for Analysis of Structural Health (SPPLASH) [6] and the results obtained by these four identification algorithms are compared with finite element model of the bridge.
17.2 The Confederation Bridge
The Confederation Bridge is a prestressed concrete box girder structure, spanning the Northumberland Strait, linking Borden, Prince Edward Island, and Cape Tormentine, New Brunswick in Eastern Canada. To cover the 12.9 km long shore-to-shore distance the bridge is divided into 21 approach spans, two transition spans of 165 m each and 43 main spans of 250 m each at a typical height of 40 m above the mean sea level. The main-span portion of the bridge is comprised of 22 repetitive structural frame modules of 500 m length each. Each module is composed of a 440 m portal frame, made up of a 250 m centre span and two 95 m overhangs, one on each side of the centre span, plus a 60 m simply supported drop-in expansion span (Fig. 17.1). The portal frame is constructed of four types of prefabricated component units, pier base, pier shaft, main girder and fixed drop-in span girder. A continuous frame structure is constructed by post-tensioning of the individual structural pieces together. The bridge girders are single cell trapezoidal box girders with section depth varying from 14 m above the piers to 4.5 m at mid-span of the drop-in girder, and a cross-section width varying from 5.0 m at the bottom to 7.0 m at the top, with 2.5 m deck overhangs.

Typical frame layout of the Confederation Bridge
17.3 Continuous Monitoring System
A comprehensive long-term monitoring system on the Confederation Bridge has been in operation since the bridge opening in 1997 in order to collect data and information about its behaviour and performance. The monitoring system measures and records both environmental and bridge response data related to ice forces, short and long-term deflections, thermal effects, corrosion and dynamic responses. The sensors of the monitoring system are installed on two adjacent spans of the bridge, a drop-in span and a rigid frame. The dynamic responses of the structure, due to the effects of wind, traffic, ice floe, and earthquake loadings are captured by 62 accelerometers distributed over the instrumented section of the bridge. In this study, the recorded signals from 50 of these accelerometers are used, which are shown in Fig. 17.2. The sensors and data loggers operate in continuous buffered data collection mode, which upon triggering by detection of specific dynamic events, such as heavy traffic or high winds, or simply upon user request, store the acceleration time history response data at the sampling rate of 125 Hz. Otherwise, only statistic information determined from the time history data, such as mean, maximum, minimum and standard deviation, are stored. A detailed description of the continuous monitoring system has been presented in [7].

Location of accelerometers in the Confederation Bridge monitoring system
17.4 Monitoring Datasets
A total of 14 data sets, sampled at 125 Hz, have been selected from the Confederation Bridge monitoring database for the present study. The first twelve datasets are recorded within a short period of time (2 days) during which the environmental conditions and loading scenarios can be considered constant. Figure 17.3 shows that the average temperature of the concrete at the instrumented section of the bridge and the wind speed at the bridge site at the time of the 14 datasets. It shows that average temperature and wind speed are relatively consistent during the time of the 12 datasets. The range of average concrete temperature is -2.7 °C to -1.4 °C, while the average wind speed range is 7.2 m/s to 14.8 m/s. The ranges of these values, 1.3 °C and 7.6 m/s are reasonable when compared to the yearly variations of 45 °C and 30 m/s for the typical annual average environmental conditions at the bridge site. The remaining 2 events are characterized by high wind scenario. The average wind speed was 35 m/s and the bridge was closed for traffic during these wind events.

Average concrete temperature and average wind speed of 14 datasets
17.5 System Identification
The following processing tasks on the data as well as the system identification are carried out using SPPLASH:
-
Baseline adjustment of the acceleration time histories by removing any voltage drift from the accelerometer signals.
-
Low pass filtering with a cut off frequency of 9 Hz using a Chebyshev type II filter of order 12. This eliminates the high frequency noise and signal components, enhancing response signal in the band of interest (0-5.5 Hz). The filtering is performed in the forward and reverse directions to eliminate nonlinear phase distortion. The low-pass filtering also serves as an anti-aliasing filter for the subsequent down-sampling of the data.
-
Down-sampling of the data to 1/3rd of the original sampling rate of 125Hz corresponding to a sampling time of 24 ms. To enhance the frequency resolution of the Frequency Domain Decomposition (FDD) method data are down sampled 5 times resulting in a sampling interval of 40 ms.
17.5.1 Stochastic Subspace Identification (SSI)
Four vertical and two lateral sensors at monitoring locations 7 and 9 are used as reference sensors for cross-correlation computation. These sensors are suitable references because of their relatively high response amplitudes and because their locations do not simultaneously coincide with modal nodes of any of the important vibration modes of the bridge. In the present study, proper models are identified by the SSI method with a model order of 150 i.e. models containing 75 modes. Even though the actual model order of the data analyzed here is typically around 40, a relatively high maximum model is used in the construction of the stabilization diagrams to allow for a clear visualization of stabilized trends. The number of block rows used in the construction of the Hankel matrix which forms the basis of the system identification, is taken as 250 for all datasets analyzed. In the assessment of the stabilized modal parameters, a stabilization limit of 0.5% is chosen for frequency identification, whereas for mode shape and damping the limits are 1% and 15% respectively. Figure 17.4aa shows the stabilization diagram for dataset 1obtained by SSI method.

Stabilization diagram. (a) SSI method; (b) PolyMAX method
17.5.2 PolyMAX Method
Here, the primary identification data, positive power spectrum is estimated via the correlogram approach with 2048 correlation lag time. The same 6 sensors (4 vertical and 2 lateral) at monitoring locations 7 and 9, selected in the SSI method are used as reference sensors here. To reduce the error due to leakage, a 1% exponential window is applied prior to correlogram spectrum estimation. To generate the stabilization diagram by the PolyMAX method, the model order between 150 and 200 is selected and the same stabilization criteria as in the SSI method for frequency, mode shape and damping are employed. Figure 17.4bb shows a typical stabilization diagram for one of the dataset obtained by the PolyMAX method. The stables poles can be easily picked from clear stabilization diagram. Interesting to note that there are gaps in some of the vertical line indicating these frequencies are not being identified within a specific band of model order. Furthermore, PolyMAX needs higher model order to stabilize poles.
17.5.3 Eigensystem Realization Algorithm (ERA)
For the ERA method, the correlations calculated with respect to the same 6 sensors at monitoring locations 7 and 9 (4 vertical and 2 lateral sensors) are used as identification data. A Hankel matrix of the dimension 8750x600 corresponding to 9.3 s of “free response” data is evaluated. As can be seen in Fig. 17.5 there is no “gap” in the singular value i.e. it is very difficult to determine the number of modes being excited by just examining the singular value plot. In most of the datasets, the truncation of block Hankel matrix is carried out with the model order of 50 to 60 so that approximately 25-30 modes are identified. As the frequency range of interest is 0-5.5 Hz, only the frequencies below 5.5 Hz are considered in the system identification analysis. Modes with high damping ratio are discarded. A threshold of 5% damping ration is established for the present study. Repeated modes are eliminated based on the lowest energy content given by the singular values. Frequencies within 20% of each other and MAC value of 0.8 are used to identify such modes.

Singular value of block Hankel matrix
17.5.4 Frequency Domain Decomposition (FDD)
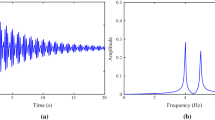
The spectra are estimated via Welch periodogram method using 2048 points FFT with a Hamming window of 50% segment overlap. This results in a frequency resolution of 0.0122 Hz for singular value plot. For each dataset, two spectral matrices were calculated, one for vertical and another one for lateral accelerations. Then, a singular value decomposition of the spectral matrices was performed to evaluate the corresponding non-zero singular values. Figure 17.6 shows the average singular values of all datasets for both directions. Damping estimate is performed in time domain assuming a SDOF around a peak via enhanced FDD.

Average singular value of spectra matrix in the vertical and lateral direction
17.6 Analysis Results from Monitoring Data
Modal vibration frequencies, mode shapes and damping ratios obtained by four system identification methods of the fourteen monitoring datasets described earlier are presented here. The results are also compared to the theoretical values based on the calculated finite element model [8] to examine the correlation between extracted and analytical modal properties.
17.6.1 Modal Frequencies
Table 17.1 presents a summary of the modal frequencies extracted from the monitoring data and the corresponding values from the shell finite element models. Both SSI and PolyMAX algorithms are able to identify 21 modes below 5.5 Hz. The ERA method fails to detect a mode at 0.55 Hz whereas in case of FDD method; two modes namely at 0.55 Hz and 0.84 Hz are not identified. The finite element modal frequencies based on the field measurement of concrete modulus (Ec = 43 GPa) are in close agreement to the measured values with an overall observation of estimated frequencies being slightly lower than the theoretical frequencies. Furthermore, the good agreement between the measured modal frequencies and the updated finite element model values show that the field observed structural dynamic properties as related to stiffness and mass are reasonably close to the design values.
In Table 17.1 the column labelled “number of identification” lists the number of monitoring datasets from which the corresponding eigenfrequencies and mode shapes have been identified. The numbers give an indication of how frequently the vibration modes are being well excited under the typical loading scenarios and thus participate significantly in the measured structural responses. The relevance of this information is for practical structural condition assessment and damage detection based on continuous structural health monitoring data, where not every theoretical vibration mode of the structure is available, but rather one is forced to rely on the subset of modes which can be retrieved consistently from the monitoring data. It is observed that 8 out of the 21 identified modes are consistently excited regardless of different loading variability while some modes, particularly the two modes at 0.55 Hz and 5.01 Hz are seldom excited.
Table 17.1 also shows information regarding the variability of the modal frequencies extracted from the monitoring datasets. In particular, the SSI method offers a more consistent frequency estimate compared to other algorithms. The variation in the identified frequencies relative to the mean appears to be higher for the lower frequency vibration modes and shows a decreasing trend for higher frequency modes. This observation has very important significance since the lower vibration modes often represent the dominant vibration behaviour of most structures under typical dynamic loading conditions, and thus can impact on the proper selection of vibration based algorithms for health monitoring purposes.
17.6.2 Mode Shapes
Modal Assurance Criteria (MAC) values between extracted and theoretical mode shapes are presented in Table 17.2. These values are computed between the mean of normalized extracted mode shapes and the corresponding theoretical mode shape. For the computation of the mean extracted mode shape, the mode shapes extracted from different datasets are normalized by their maximum coefficient. For all 4 algorithms, the average MAC value between extracted and theoretical mode shapes is greater than 0.80, especially for SSI; the average MAC is 0.89 indicating very good correlation. ERA method, with an average MAC of 0.88 is as good as SSI at least in terms of mode shape estimation.
Figure 17.7 shows some of the important vibration mode shapes extracted by system identification process from the field monitoring data by SSI method and a comparison with the expected behaviour from the finite element model. The overall agreement of the experimental results with the expected values is generally good, especially considering the complexity of the structure and with the use of output-only system identification methods in processing of ambient vibration data. As may be observed in Fig. 17.7, at the expansion drop-in span, discrepancies between the identified and theoretical mode shape tend to be relatively larger. This fact stems probably from less perfect modeling of the actual drop-in span support condition.

Comparison of experimental and analytical mode shapes below 1 Hz. Vibration modes from the finite element model are shown in green with doted lines and the modes identified from the monitoring data are shown in grey with full lines [1]
17.6.3 Modal Damping Ratios
The averages and standard deviations of the damping ratios of the vibration modes identified by different algorithms are presented in Table 17.2. In general, the standard deviations obtained for the damping ratios are much higher than those obtained for the modal frequencies especially for ERA and FDD methods; the high variance on damping estimate is quite noticeable. In case of FDD method, damping estimate for low frequency modes are unrealistically high, an indication of high leakage bias in spectra computation. In fact, the closeness of the modes and the relatively low frequency resolution adapted to guarantee significant number of averages which is essential for good performance of FDD technique, leads to an unaccepted biased spectra estimation. On the other hand, both SSI and PolyMAX methods provide comparable damping estimate. The average modal damping ratio by SSI method is 1.62% corresponding to 53% standard deviation of the mean while for PolyMAX; these values are 1.67% and 62% respectively. It is worth noting that the mean extracted modal damping ratios show a slight decreasing trend with increasing frequency.
17.7 Conclusions
In the present study, a total of fourteen field monitoring datasets from the Confederation Bridge monitoring database have been analyzed by four different output-only system identification techniques and the extracted modal properties are investigated against expected design values.
From the output only system identification analysis of the monitoring data, twenty one vibration modes are identified in the frequency range 0-5.5 Hz, exhibiting an overall very good correlation with the modal properties previously calculated using the design finite element modelling. The identified modal frequencies differ by less than 1% on average from the expected design values and the extracted mode shapes are reasonably similar to those expected from the design except for some localized discrepancies at the drop-in-span where the actual asymmetrical support conditions are more complex than those assumed in the finite element models of this study.
Among all the methods, SSI algorithm seems to be more consistent in frequency, damping and mode shape estimate. The application of PolyMAX and SSI methods to the ambient vibration data results in a very similar estimate for natural frequencies and damping ratios while for mode shape estimation, SSI outperforms PolyMAX method. The more traditional identification algorithm, ERA method provides comparable results at least in terms of frequency and mode shape estimation. Furthermore, all 4 algorithms exhibit higher variance in damping estimate especially for ERA and FDD, it is quite noticeable.
References
Londoño NA, Lau DT, Rahman M (2011) Characteristics of dynamic monitoring data and observed behaviour of the Confederation Bridge due to operational load variations. Can J Civil Eng, doi: 10.1139/cjce-2011-0370
Brincker R, Zhang L, Anderson P (2000) Modal identification from ambient response using frequency domain decomposition. Proceedings of IMAC-XVIII, International modal analysis conference, San Antonio, TX, USA, pp 625–630
Juang JN, Pappa RS (1985) An eigensystem realization algorithm for modal parameter identification and model reduction. J Guid Contr 8(5):620–627
Van Overschee P, De Moor B (1996) Subspace identification for linear systems: theory-implementation-applications. Kluwer-Academic, Dordrecht, The Netherlands
Peeters B, Vecchio A, Van der Auweraer H (2004) PolyMAX modal parameter estimation form operational data. Proceedings of the 2004 international conference on noise and vibration engineering, 20–22 September, Leuven, Belgium, pp 1049–1063
Desjardins SL, Londoño NA, Lau DT, Khoo H (2006) Real-time data processing, analysis and visualization for structural monitoring of the Confederation Bridge. J Adv Struct Eng 9(1):141–157
Lau DT, Londoño NA, Desjardins SL (2004) Challenges of using continuous monitoring data for structural condition assessment. Fourth international workshop on structural control, IASC, Columbia University, New York
Lau DT, Brown T, Cheung MS, Li WC (2004) Dynamic modelling and behaviour of the Confederation Bridge. Can J Civil Eng 31:379–390
Acknowledgements
The financial support for this research provided by the Natural Science and Engineering Research Council and the technical assistance provided by the maintenance and operation staff of the Strait Crossing Bridge Ltd are gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 The Society for Experimental Mechanics, Inc.
About this paper
Cite this paper
Rahman, M.S., Lau, D.T. (2013). A Comparative Study of System Identification Techniques Under Ambient Vibration. In: Catbas, F., Pakzad, S., Racic, V., Pavic, A., Reynolds, P. (eds) Topics in Dynamics of Civil Structures, Volume 4. Conference Proceedings of the Society for Experimental Mechanics Series. Springer, New York, NY. https://doi.org/10.1007/978-1-4614-6555-3_17
Download citation
DOI: https://doi.org/10.1007/978-1-4614-6555-3_17
Published:
Publisher Name: Springer, New York, NY
Print ISBN: 978-1-4614-6554-6
Online ISBN: 978-1-4614-6555-3
eBook Packages: EngineeringEngineering (R0)