
Abstract
An automated control framework for cost-effective intra-dispatch real-power balancing is proposed in this chapter. The control objective is to balance the sustained variations in wind power, resulting from nonzero mean energy offsets around the wind power’s forecast or scheduled value, between two consecutive dispatch actions. The proposed control is an automated function that will track intra-10 min supply-and-demand imbalances caused primarily by sustained wind ramps. The balancing objective is achieved by ramping the slow generation resources from their scheduled dispatch, thereby minimizing the need for fast regulation reserves.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others
Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
In this chapter we propose a model-based control framework for generating the real-power needed to follow the sustained wind power deviations within each dispatch interval. A quasi-stationary model is derived that explicitly states the dependence of real power output of conventional generators as states on nonzero mean wind power variations as disturbances. This model is obtained by subjecting the steady-state droop characteristics of generators to real-power flow constraints. No thermal line flow congestion is modeled.
Next, the model is utilized to design the control of set points on conventional governors. The readjusting of governor set points is in response to sustained wind ramps, and it could be viewed as the slowest tertiary-level automated load-following function. The wind power output is modeled as a negative load and varies around its long-term average 10-min forecast.
Our proposed approach is qualitatively different than the fastersecondary-level balancing function known as Automatic Generation Control (AGC). The task of AGC is to ensure prespecified short-term frequency standards. Treating frequency deviations as a system output, AGC responds on a much shorter second-by-second timescale to frequency offsets resulting from faster wind power fluctuations. However, the control we propose is intended to balance the wind power deviations on a longer time horizon, specifically on a minute-by-minute basis, resulting in acceptable mid- and long-term frequency. Intra-dispatch wind variations are hard to predict accurately. The objective is to ensure sufficient fast regulation reserves so that AGC can balance fast fringe fluctuations in wind power output. Therefore, any effect of sustained surplus or shortage in scheduled wind power output, forecasted 10-min ahead of time, can be offset without requiring extremely fast generation resources. It is suggested that the proposed wind-following function can be automated to respond to varying wind power profiles with a feedback control. Nevertheless, if generation resources are scheduled on an hourly basis, the intra-dispatch real-power balancing control scheme can be implemented every 10 min in a feed-forward predictive way. In this chapter we illustrate only the automated non-predictive version of intra-10-min real-power balancing, on the islands of Flores and São Miguel. For the given conventional generation control on these islands, the efficacy of combined intra-dispatch and AGC in reducing frequency deviations within a dispatch interval is notably better than when conventional AGC is implemented. If intra-dispatch real-power balancing is to result in prespecified frequency response, we illustrate that compared to conventional AGC, combined intra-dispatch and AGC requires less expensive fast reserves.
2 Problem Overview
The balancing of electricity supply and demand requires a two-pronged approach. First, generation resources are scheduled based on predictions, primarily of load and wind. As the decision variables from scheduling are obtained, the set points of the conventional generators are readjusted to ramp up/down their power outputs to the scheduled values in a feed-forward way. As reviewed in Chaps. 7 and 9, the dispatch of generation resources involves a maximization of social welfare on a longer time horizon, without taking into account intra-dispatch wind ramps. Therefore, scheduling alone will not ensure that acceptable quality of power is delivered to the end users. Subsequent to dispatch, a real-time balancing of the mismatch between the actual demand and the scheduled supply must be achieved through feedback control actions. In the previous chapters, balancing functions involved the optimum utilization of conventional resources on a 10-min timescale, with the 10-min average wind power output assumed to be known ahead of time. To balance intra-10-min temporal variations in wind speed, which are not known ahead of time, we now propose a control model to follow hard-to-predict sustained variations in the wind power output. Only the conventional generation technologies are considered for intra-dispatch balancing, i.e., hydro- and diesel power plants.
2.1 The Challenges of Intra-dispatch Power Balancing
While balancing intra-dispatch supply-and-demand error in real time, the system operator faces two critical challenges. These are summarized below:
-
1
Lack of Intra-dispatch Wind Speed Information: The control functions for real-power balancing include frequency stabilization, frequency regulation, and wind/load power following. These closed-loop control schemes balance the hard-to-predict real-power supply-and-demand mismatch over multiple time horizons. Also, closed-loop control can be either feed-forward or feedback. Feed-forward control is a proactive approach to ramp up/down the balancing resources in anticipation of power imbalances, such as varying load patterns, based on historical data and very short-term predictions. For example, if intra-10-min wind speed data is available, one can predict, using the forecast models described in Chap. 6, minute-by-minute variations in wind speed. Therefore, with the availability of wind speed information on a much shorter timescale, it becomes possible to extend the feed-forward approach in order to balance anticipated intra-10-min variations in wind power. Alternatively, the feed-back control loop is a reactive approach to balance stochastic/white noise or fringe fluctuations with a tolerable nonzero mean around the load. In general, the higher the accuracy of the forecast and shorter the timescale of the predictions, the lower the reliance on feedback closed-loop AGC. Subsequently, less regulation reserves will be required for non-predictive balancing approach or feedback control. However, due to the fact that there is typically a lack of accurate intra-10-min wind speed information, it is critical to ensure sufficient balancing reserves for short-term fluctuations as well as for long-term sustained variations in wind. The difference between the actual and predicted wind power outputs for Flores is shown in Fig. 14.1.
Fig. 14.1 
10-Min ahead wind power forecast and actual wind power output
-
2.
Island-Type System with High Wind Penetration: In large continental power networks, for the purpose of frequency stabilization and regulation, spinning reserves are shared among multiple balancing authorities through interconnecting tie-lines. The reserves are relieved once the affected control area corrects its power shortage or surplus through AGC. Presently, wind power penetration in large-scale electric power networks is low. Wind supplies only a small fraction of the total demand. Wind fluctuations are, therefore, typically modeled as stochastic disturbance, even though their deviations are not white noise [1]. However, a full spectrum of problems arises if significantly high percentage of wind generation penetrates an island network, such as the Azores. Today, wind generation accounts for 14 % of the total installed capacity on Flores. At times, the scheduled wind is as high as 21 % of the system load. To plan sustainably for future demand, it is expected that additional wind generators will be installed. For stand-alone island networks with limited conventional resources, which have high wind penetration and lack external support through tie-lines, it is imperative that real-power balancing control be redesigned systematically. Since intra-dispatch wind variations will be much more pronounced in this kind of setting, the conventional hypothesis of modeling wind fluctuations as zero mean deviations may not be valid for Flores. As more wind connects to island networks, it will be hard to meet mid- and long-range frequency standards through AGC alone.

Based on the discussion so far it is apparent that the operational challenges to maintain a close to nominal frequency in the Azores networks, i.e., 50 Hz, are qualitatively different from conventional frequency control problem. Generation resources are limited for intra-dispatch supply-demand error balancing. Since the Azores Islands are not electrically connected to each other, a lack of stabilization support from adjoining networks is also a fundamental limitation. Therefore, fast-responsive generators are needed in these networks, particularly those with combustion turbine technology such as diesel power generation. Although unsustainable, they are essential for the reliable operation of the Azores. A novel approach is thus required to ensure the effective implementation of all control actions, i.e., stabilization, regulation, and wind/load following, with a minimal use of combustion generators, i.e., diesel plants.
3 Granularity of Scheduling and Balancing Wind
The preceding section provides a qualitative description of the challenges to real-time balancing of the supply-demand error. To interpret the effect of scheduling on error balancing explicitly, we now illustrate the consequences of inaccurate wind forecasts and scheduling errors on the amount of reserves required for intra-dispatch power balancing. Figure 14.1 depicts three curves. Plotted over five dispatch intervals, i.e., 50 min, they represent 10-min-ahead wind power forecasts based on wind speed predictions, the observed 10-min average wind power output, and the actual wind power output profile. The step plots are based on the available 10-min average wind speed measurements and 10-min wind speed predictions obtained from the forecast models (Chap. 6). Based on these plots, we re-summarize the challenges to intra-dispatch real-power balancing:
-
1.
An inaccurate prediction of wind power output will lead to an error in dispatch. This will result in the under- or over-scheduling of conventional generators (Fig. 14.2).
-
2.
Intra-10-min variations in wind power output are not only large but sustained as well. These can no longer be treated as white noise deviations. Also, unlike load ramps, it is hard to define intra-dispatch wind ramps.

Flores: scheduling error due to lack of intra-10 min wind speed information
These two factors will have profound effects on the balancing of the intra-dispatch supply-demand mismatch. A detailed interpretation of these challenges is covered in the following subsections.
3.1 Feed-Forward Generation Schedule
Before we begin to describe the effect of scheduling error on intra-dispatch power balancing, let us summarize the scheduling approach proposed in the preceding chapters. Under the assumption that wind speed has memory, or that it behaves like a state, 10-min-ahead wind speed forecast is made and an average wind power output for the dispatch interval is predicted. Out of the two generation dispatch algorithms, static dispatch and look-ahead dispatch (Chap. 7), the latter results in least-cost scheduling since it takes into account the predicted average wind generation over 10 min. Analogously, while scheduling the load, adaptive load management (Chap. 8) accounts for price-responsive demand in the system. When implemented in tandem, model predictive control and adaptive load management effectively balance the long-term temporal variations in system demand and wind power output. This is on a timescale ranging from 10 min to 1 h (Chap. 9). With least-cost dispatch as the primary objective, the maximum utilization of renewable resources without spillage, particularly of the forecasted wind generation, determines the schedule of conventional generators and price-responsive demand. This is to ensure a full utilization of the predicted wind power output. However, an error in wind speed predictions, short term as well as long term, will result in intra-dispatch real-power imbalances:
Equation (14.1) is a mathematical representation of wind forecast error. Here, \(e_{\mathrm{W}}^{10}\) represents prediction error in average wind power output over 10 min. \(\hat{P}_{\mathrm{W}}^{10}\) and \(P_{\mathrm{W}}^{10}\) denote the predicted average wind generation and the observed or measured average wind generation, respectively. Figure 14.1 summarizes the prediction error in wind generation for Flores. For some dispatch intervals, the forecast error \(e_{\mathrm{W}}^{10}\) is larger than 70 kW. In addition, the system operator may experience error in the load forecast as well. Nevertheless, given the rich load data history available to the system operator, daily demand curves can be predicted with a high degree of accuracy. However, if wind generation is to be scheduled as a negative load, a very accurate wind speed forecast is necessary to support its increasing penetration reliably. Figure 14.2 illustrates possible cases of scheduling error based on the anticipated wind power output on Flores. For each case, corresponding offsets in the system frequency are shown in Fig. 14.3 if the set points of the governors are not readjusted between 0 and 10 min. An underprediction of wind power generation leads to over-frequency operation of the system within the 10-min interval. Similarly, in the case of an overprediction of wind power output, under-frequency operation of the system results.

Flores: persistent frequency deviations in the system
3.2 Conventional AGC (AGC)
In order to ensure quality of service (QoS) to customers, the forecast error (\(e_{\mathrm{W}}^{10}\)) and sustained minute-by-minute temporal variations in wind generation must be balanced. One possible way to offset these nonzero mean real-power imbalances is to implement the conventional generation control scheme by utilizing fast secondary regulation reserves [2]. Most utilities regulate the system frequency by using the tried-and-tested concept of area control error (ACE). ACE represents load-generation mismatch in a control area. The offsets in frequency and tie-line flows are bundled into ACE signals, simplifying the task of regulating frequency and inter-area exchange through a single control input. The fast regulation reserves respond to signals communicated from the control center. Equation (14.2) is a mathematical representation of area control error. △ T i represents the error in net tie-line flow into ith control area, with the error being the actual minus the scheduled tie-line flow exchange. Similarly, △ f represents the actual frequency minus scheduled frequency of the control area. β i is the control area’s frequency bias setting in MW/0.1 Hz, represented with a negative sign:
In the case of an island-type network, there are no tie-line interconnections. Therefore, the term △ T i does not exist. The above mathematical formulation for ACE will change for the Azores. There will only be one control area with i = 1:
Large continental utilities estimate the value of ACE every few seconds. The rate of sensing varies for different ISOs. For example, in American utilities it is mandatory to sample ACE at least every 6 s. The updated control is implemented over a 1-min period, communicating the weighted ACE signal. This may be seen as a low-pass filter for intra-dispatch balancing, capturing only the sustained supply-and-demand mismatch. Real-power imbalances are expected to be highly volatile in the Azores. Therefore, a higher rate of sampling and updating of the ACE signals will be needed. Also, the regulation capacity for feedback control is limited on the Azores Islands, and only a small error in supply and demand can be balanced. In the case of a surplus wind power, diesel units can be ramped down quickly. However, it may not be possible to ramp them up beyond their rated capacity in response to a large scheduling error (\(e_{\mathrm{W}}^{10}\)) and sustained intra-dispatch variations in wind. For example, on Flores, even though the installed capacity of the diesel generation exceeds total demand, it is not plausible to have all four diesel units online 24 h a day. This is particularly the case when there is a shortage of combustion fuel, such as when the sea is too rough to allow oil imports to arrive. In the worst-case scenario, the islands have to withstand the problem of an oil shortage for a week or two. In Fig. 14.2, let us take the case where the system operator under-schedules conventional generation resources by overpredicting the wind power output. Over the next 10 min, we aim to compensate for the wind power shortage with a limited capacity of fast regulation reserves. Figure 14.4 shows that when the regulation reserves have been utilized completely, frequency deviations are still as large as 0.15 Hz. The North American Electric Reliability Councils, control performance standards state that ACE or power imbalance within a control area must cross zero every 10 min. Such standards are hard to achieve in the Azores by means of conventional generation control, as reflected in the sustained frequency deviations in Fig. 14.4.

Island-1: sustained frequency deviations even with AGC
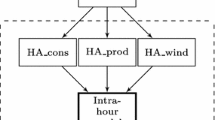
From the discussion so far, it is now clear that the deviations in wind power can be filtered into two components. These are fast second-by-second fluctuations and slow but sustained minute-by-minute variations (Fig. 14.5). The high cost of operation and limited balancing capacity of diesel units make them unviable for tracking of slow variations. On Flores, a possible approach is to ramp controllable hydro on a minute-by-minute basis within each dispatch interval. Compared to the secondary-level function of AGC, the generation output of the hydro unit can be increased on a much slower timescale to balance the wind as well as the load ramps. Diesel units or AGC reserves respond on a second-by-second basis to ensure short-term frequency quality. Moreover, they are much needed for contingency conditions such as wind gusts or a sudden loss of wind turbines due to a voltage drop. Therefore, it is not prudent to balance wind and load ramps through fast regulation reserves. These fast reserves are required for worst-case scenarios to ensure the reliable operation of an island-type network and must be preserved to the greatest extent possible.

Typical intra-10-min wind power profile
4 Managing Wind Variations: A Qualitative Outline
For systems with high wind penetration, spatial and temporal variability in wind should be taken into account while balancing intra-dispatch variations and scheduling error in wind power:
-
(a)
Spatial Variability: The planning of balancing reserves must be based upon the electrical distances between the balancing units and the sources of disturbances, i.e., wind farms. One may observe potentially larger imbalances at locations where the installed wind capacity is high. The mapping of spatially nonuniform penetration of wind may not be of much significance for the small Flores network, where the impedances of the wires between different nodes are of the same order. However, it is critical for large island networks. For example, São Miguel’s power network spreads over a large geographical area with 1,900 buses. Some of the generator nodes in the São Miguel’s network are weakly interconnected as the admittance of electrical wires connecting them is low. As a result they can be modeled as a set of weakly coupled subsystems. A decentralized intra-dispatch power balancing approach is needed in such a case. In order to map location-based variations in wind power output, it is imperative that network constraints be taken into account. Thereafter, spatially differentiated or even decentralized intra-dispatch real-power balancing can be implemented. It can be supported by means of PMUs and dedicated communication between the balancing unit and the source of disturbance.
-
(b)
Temporal Variability: Intra-dispatch wind variations will span over multiple timescales. A balancing over all time horizons is essential for reliable operation. For intra-dispatch balancing, wind variations are filtered into two components, shown in Fig. 14.5. Firstly, there are large but slow sustained variations sampled every [K] seconds, where K equals 30 s. A quasi-stationary control approach can be applied to balance this slow component. As shown in Fig. 14.6, the reference setpoints of the slow generators on Flores, particularly controllable hydro, can be updated every 30 s in response to intra-dispatch quasi-stationary wind variations. The rationale behind the choice of K = 30 is explained in next section. Secondly, there are fast fringe fluctuations around the slow wind variations. Fast regulation reserves, or AGC units such as a diesel plant, flywheels, dVars, electric vehicles, and batteries, respond to fringe fluctuations in wind power output; this is covered in subsequent chapters (Chaps. 15 and 16). These fluctuations are assumed to stabilize before the slow quasi-static control scheme responds, the model for which is described in the next section.

Quasi-static control updates between consecutive schedules
5 Proposed Intra-dispatch Balancing Approach
Next we propose a quasi-static control approach for following sustained intra-dispatch wind variations on Flores. Before the control framework is derived, it is necessary to revisit the concept of steady-state droop characteristics.
5.1 Steady-State Droop and Gain of a Generator
For synchronous generation technologies, the standard state-space model of their governor-turbine-generator (GTG) is a dynamical controller represented by a set of ordinary linear differential equations. To derive the steady-state droop characteristics, and hence the quasi-stationary control framework, the primary dynamics are assumed to be stabilizable. In other words, the derivatives of the states are set to zero and the steady-state droop of the generator obtained. Numerically, a generator’s droop is the rate of change of its rotational speed with respect to the change in its power output. The generator’s power output is represented by a three-way relation [3]:
Variables P G, \(\omega _{\mathrm{G}}^{\mathrm{ref}}\), and ω G refer to the power output, governor frequency set points, and the rotational frequency of the prime mover, respectively. Equation (14.4) is obtained from the linearized GTG model. Therefore, the states represent deviations from their nominal values. σ ss is the steady-state droop characteristics of the generator; the coefficient a also depends on the generation technology. The droop σ ss determines the governing action of a generator. It represents the sensitivity of generator frequency ω G with respect to any change in its power generation P G, at a constant set point value \(\omega _{\mathrm{G}}^{\mathrm{ref}}\). σ ss in turn determines the frequency bias of the island-type network, i.e., β parameter in Eq. (14.3). However, before β is calculated, the steady-state gain G ss of all controllable generators must be estimated. Parameter β can thereafter be obtained by adding the gains of all N controllable generators in the network:
Equation (14.6) represents the closed-loop primary dynamical model of GTG for a hydropower plant:
The state variables for the hydro governor are \(\omega _{G_{\mathrm{h}}}\) for the generator frequency, q for the penstock flow, and v and a for the governor droop and the gate position, respectively. M h and D h are the inertia and damping constants. T e and T s represent the time constant of the valve-turbine gate system and the servomotor gates, respectively. r h and r′ are the permanent speed droop and the transient speed droop of the hydro generator, respectively. e h, k q, k w, T f, T q, and T w are all ratios of constants of the standard hydro turbine [4]. Now the rate of update of the set point \(\omega _{\mathrm{G}}^{\mathrm{ref}}\), i.e., 30 s, is relatively slow with respect to the closed-loop primary dynamics. This is much slower than the rate at which the gate position a can be changed. The gate position controller is the slowest component of the dynamical controller [Eq. (14.6)] with a time constant of approximately 4 s. Therefore, the transients of the hydropower plant settle to steady-state before the reference set point of the governor is updated. Following is the steady-state droop characteristic of hydro, arrived at by assuming the primary dynamics to be stabilizable:
The primary dynamical equation for diesel or a combustion turbine can be represented as:
State variables \(\omega _{G_{\mathrm{d}}}\) and V CE represent the generator’s frequency and fuel controller. Variables W F and W Fdot represent the fuel flow, while M d and D d are the inertia and damping constants. More details about the model can be found in [5, 6]. By assuming the primary dynamics to be stabilizable, a three-way relation between can be derived for a diesel generator as well:
5.2 Droop Characteristics of Generators on Flores
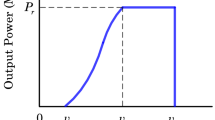
The steady-state droop of controllable generators can be figuratively represented as a straight line, with a slope as a negative of its steady-state gain G ss. Figure 14.7 is a qualitative representation of the droops for diverse balancing technologies on Flores. While flywheels can be much more responsive compared to conventional units, they have limited reserves. Therefore, to balance sustained intra-dispatch wind variations, we consider only the droops of conventional technologies. The steady-state gains or droops of controllable hydro and diesel generators on Flores can be summarized as:

Qualitative representation of steady-state droops
Based on the generator’s parameters, we now evaluate and compare these gains for hydro and diesel plants on Flores:
Or, alternatively it can be concluded that:
If the set points of diesel and hydro plants are not adjusted in response to intra-dispatch imbalances, the diesel generator can produce about 22 times more power than the hydro plant for a given frequency offset.
6 Proposed Quasi-Stationary Balancing Model
As described in Sect. 14.4, the spatial variability in wind generation must be mapped for the purpose of differentiating real-power imbalances at multiple locations. We propose a control model that utilizes local power output as measurements [7].
6.1 Seamless Integration of Heterogeneous Balancing Resources
A control scheme with generation power outputs as state variables is critical for incorporating novel regulation technologies like batteries and electric vehicles. Unlike conventional synchronous generators, these technologies lack a prime mover and do not have frequency as state variable. For the purpose of intra-dispatch power balancing, these generation resources can only be modeled through their power output. Hence, for this reason, our model is based on the power output of the balancing resources as state variables. Assuming a decoupling between real and reactive power, the following sensitivity matrix can be obtained for real-power balancing:
Here, δ represents the phase angles of the buses and subscript L signifies the load buses [3]. Equation (14.13a) can be rewritten in terms of only the generator bus phase angles δ L Footnote 1:
It is critical to note that P G is a column vector and consists of conventional generation technology as well as wind farms. Denoting the term \((J_{\mathrm{GG}} - J_{\mathrm{GL}}J_{\mathrm{LL}}^{-1}J_{\mathrm{LG}})\) as K P, Eq. (14.13b) can be reformulated as:
Subscripts G C and W refer to conventional generators and wind farms, respectively. Now eliminating δ W since P W or intra-dispatch sustained wind variations are to be modeled as disturbances:
A relation between the bus angle and the frequency of the conventional generator can be derived in a causal way:
The three-way droop equation and the network constraints over two time steps K and K + 1 lead us to following state-space model:
The matrices A and B are (n − 1)-dimensional square matrices, where n is the number of controllable balancing resources within the network. Their numerical values depend on GTG’s parameters and the sensitivity matrix of real power with respect to the bus angles.
6.2 Mid- and Long-Term Stability
The system matrix A in Eq. (14.16) is represented as:
I represents an identity matrix. The parameter α equals (\(K_{P_{\mathrm{GG}}} - K_{P_{\mathrm{GW}}}K_{P_{\mathrm{WW}}}^{-1}K_{P_{\mathrm{WG}}}\)) in Eq. (14.14b). T t , a scalar, is the sampling rate of 30 s. The diagonal matrix σ represents the steady-state droops of (n − 1) controllable generators. Since Eq. (14.16) is a discrete-time state-space model, the eigenvalues of matrix A must be less than unity. This is to ensure mid- and long-term system stability.
6.3 Intra-dispatch Balancing: Control Gain
Based on the structure of system matrix A, as well as the control objective, there can be multiple ways of designing the gain for intra-dispatch real-power balancing:
6.3.1 Tracking Wind Variations
One possible approach of designing the control gain is to track quasi-static variation in wind power output. This can be achieved by having the following control input:
In Eq.(14.18), the set points of the governors (\(\omega _{\mathrm{G}}^{\mathrm{ref}}\)) are updated in response to (\(P_{\mathrm{W}}\left [K\right ] - P_{\mathrm{W}}\left [K - 1\right ]\)). The wind variations are balanced with a delay. Since Eq. (14.18) represents a delayed response of the generation resources to the sustained wind variations, error will always exist. The residual real-power error will be balanced by the slack generator or by AGC units in a distributed way. Therefore, for the purpose of tracking, communication between balancing resources and source of disturbances is needed.
6.3.2 Ensuring Long-Term Stability
As described in the preceding subsection, long-term system stability can be ensured only if eigenvalues of system matrix A are less than unity magnitude. The matrix A is dependent on the parameters α, T t , and σ. The network constraints, i.e., how much power can be delivered by the balancing resources to the sources of disturbance, are represented by matrix α. Similarly, the sampling time T t is chosen so that the transients of the dynamical controller stabilize before reference points are updated. The steady-state droop matrix σ of controllable generators is technology dependent. As per Eq. (14.17), long-term system stability is determined by these three factors.
For the case when the matrix A has eigenvalues greater than unity magnitude, it is not possible to track wind variations with an unstable system. Therefore, the tracking input described in Eq. (14.18) cannot ensure long-term system stability. A similar observation of long-term instability was noticed in Flores. With two controllable generators, i.e., n = 2, there can be two possible system matrices of unity dimension (n − 1), one each for the case when either the controllable hydro plant or the diesel generator is used for intra-dispatch power balancing. The eigenvalues of matrix A, when the hydro plant and the diesel generator serve as intra-dispatch balancing resource, are − 8. 35 ×1002 and − 36. 48, respectively.
In such a case, an alternative is to design a feedback gain for a stable system. For example, a discrete linear-quadratic regulator to design control input \(\omega _{\mathrm{G}_{ \mathrm{C}}}^{\mathrm{ref}}[K]\) minimizes the quadratic cost function:
The objective is to minimize locational frequency offsets as well as the cost of control. Matrices Q and R are the state and control weighting matrices, respectively. The matrices must be so chosen as to reflect the relative quality of service and the cost of balancing at different nodes. For example, at the locations where frequency offsets are expected to be larger or where a better quality of service is needed, the corresponding diagonal element in the matrix Q should be relatively high. Similarly, for expensive balancing resources such as diesel, the corresponding elements in the R matrix must reflect the high cost of control. The gain k obtained by solving discrete-time Riccati equation is used to design the input as:
Therefore, the generators respond to the deviations in their frequency. The deviations in the frequencies are a result of wind variations (\(P_{\mathrm{W}}[K + 1] - P_{\mathrm{W}}[K]\)). This may be seen as output-based closed-loop stable power balancing. The communication among balancing resources will be determined by the structure of closed-loop matrix (A − B ×k).
6.3.3 Tracking Wind Variations with a Stable System
On Flores there is just one balancing resource (i.e., \(n - 1 = 1\)). Therefore, the only option of designing a gain is to provide full-state feedback using discrete linear regulator gain and stabilize the system. However, for large networks there can be multiple balancing resources with (n − 1) > 1. If the system is unstable to begin with, some of the balancing resources can be deployed to just ensure long-term system stability. Subsequently, other balancing technologies can be used for tracking of wind variations based on their electrical proximity to sources of disturbances:
Here, the input \(\omega _{\mathrm{G}_{\mathrm{C}1}}^{\mathrm{ref}}\) stabilizes the system. Similarly, the sustained wind power variations are tracked through the input \(\omega _{\mathrm{G}_{\mathrm{C}2}}^{\mathrm{ref}}\). This can be one possible approach to design control gain for a large island like São Miguel which has three diesel generators (n = 3).
7 Enabling Sustainable Integration of Wind on Flores
Through simulations we now illustrate the efficacy of the quasi-stationary control framework to track sustained wind variations on Flores. To ensure long-term stability for Flores with (\(n - 1 = 1\)), discrete-time Riccati equation gain (k) was designed for intra-dispatch power balancing. While equal weights were chosen for frequency offsets (\(\omega _{\mathrm{G}_{\mathrm{C}}}\)) for the case of hydro and diesel as balancing resources, the cost of control through diesel was chosen to be ten times as much as that of a hydropower plant. The control gain was estimated through an infinite horizon solution of the Riccati equation to ensure provable performance over a time horizon as long as 10 min. The discrete-time Riccati equation gain (k) was (7. 84) when hydro was used for intra-dispatch power balancing. Similarly it was ( − 0. 09) when diesel unit balanced intra-dispatch wind variations. Figure 14.8 shows a possible profile of wind power output between two consecutive dispatches that the Flores network was subjected to.

Intra-dispatch wind power output profile on Flores
Figures 14.9 and 14.10 depict the frequency deviations and power outputs when hydro and diesel generators are alternately used for balancing sustained wind variations. The simulations reflect long-term frequency deviations at the generator buses over 10 min. Since a balancing resource cannot follow wind variations accurately, a residual error will always exist. Therefore, a fraction of the real-power mismatch will be balanced by AGC or the slack bus. In Fig. 14.9, while the hydro follows the wind variations, the residual power imbalance is corrected by diesel since it serves as a reference bus. Similarly, when diesel is following wind (Fig. 14.10), hydro responds as a slack bus. For the slack bus or the reference bus, the power output is a result of generator droop, and there is no change in the frequency set point. With the steady-state gain of hydro unit \(G_{\mathrm{ss}}^{\mathrm{Hydro}}\) being smaller than that of diesel unit \(G_{\mathrm{ss}}^{\mathrm{Diesel}}\) by a factor of 22, the frequency offset in Fig. 14.10 is larger as compared to that in Fig. 14.9. Hence, the technology with low gain, i.e., hydro, must be used for tracking slow variations in wind, and the technology with high gain must be used as the AGC unit. Wind can be balanced in a much cheaper and more environmentally cleaner way if the hydro is slowly ramped up to follow wind and diesel unit balances residual error.

Hydro unit balancing intra-dispatch wind variations

Diesel unit balancing intra-dispatch wind variations
8 Electrical Distances: Effects on Intra-dispatch Power Balancing
Electrical wires act as transporter of energy between different nodes. The electrical distance between two nodes is numerically equal to the transmission time in microseconds, i.e., the duration of travel of an electromagnetic wave through them. The transmission time depends on the impedances of the electrical wires. Therefore, power transferred from one end to another is based on system conditions such as bus angles, voltages, and wire impedances. Ensuring enough generation capacity does not guarantee power delivery to the load. On Flores, the impedances of electrical wires between different nodes are of the same order. The generator nodes are strongly coupled to the wind farm. If the impedance of the electrical connections between the source of disturbance and the balancing resources on Flores was weak, different generator power outputs would result for the purpose of intra-dispatch real power balancing. Figure 14.11 illustrates the change in power output of the hydro and diesel generators, subject to wind variations in Fig. 14.8, if the impedances of connection between the wind farm and the conventional generators were reduced by a factor of 5.

Generator outputs for weakly connected wind farm on Flores
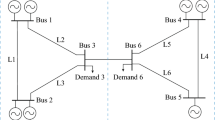
In contrast, on São Miguel, the electrical impedances between the nodes differ significantly. While planning wind farms on São Miguel, the electrical distance between the wind farms and the conventional balancing resources must be taken into account. The island has only three controllable diesel generators on bus 1, 2, and 3. If São Miguel operators plan to integrate wind, they must carefully select its location in the network, in order to ensure efficient balancing of intra-10-min wind variations. Different power output profiles for the diesel generators on São Miguel will result if the wind turbines are built at different locations. The wind power output profile shown in Figs. 14.8, 14.12, and 14.13 depicts the power generated by diesel generators for two possible scenarios, i.e., when the wind farm is built at bus 4 or at bus 15.

Wind farm built at bus 4 on São Miguel

Wind farm built at bus 15 on São Miguel
9 Intra-dispatch Demand Response
Motors or inductive loads form a large component of utility demand: typically 40–60 %. Similarly, in the Azores, various kinds of induction motor loads can be found. With their aggregate inertia being high, they can contribute significantly to intra-dispatch balancing through real-time demand response as well as direct load control. It is imperative to identify and classify inductive loads based on their type (residential/commercial/industrial), size (large/small based on power consumption), time-scale or rate of response to system imbalances, and willingness to participate. For the purpose of scheduling demand based on the customer’s willingness to pay, such physical attributes of the loads in the Azores have been described in Chap. 8. Once scheduled, these load characteristics can be further utilized to balance intra-dispatch supply-demand error.
To implement the concept of real-time demand response, it is critical to relate the timescales of the load response to those of the system imbalances. For example, to balance sustained variations (Fig. 14.8), the system operator can possibly utilize large commercial and industrial loads as well as a large aggregate of small residential loads. There are two ways to implement intra-dispatch demand response. First, it is possible for loads, utilizing frequency sensors embedded in variable speed drives, to act as balancing resources through homeostatic control. The induction motor loads can be converted into variable speed drives like constant power and constant torque based on the utility of the end user. The second way to implement intra-dispatch demand response is direct control of the load by the system operator. While the first approach can be applied to all kinds of inductive loads, small or large, the second approach is more useful for noninductive or resistive loads such as lighting in shopping malls. Also, direct load control is practical for large induction motors (industrial loads) if the system operator wishes to refrain from initial investment expenditure on load automation or the embedding of sensors. Likewise, the automation of small induction motors to variable speed drives, through sensors and power electronics, is the only way of implementing intra-dispatch demand response at the household level. On Flores, household refrigerators account for 42 % of residential consumption. Always online, these loads can serve as a large aggregate for short-run intra-dispatch balancing reserve. Experiments prove that freezer temperatures rise by one and a half degrees Celsius following 30 min of power deficit. Refrigerators are designed to handle the fast on/off switching of cycles. By controlling their switching cycles, significant levels of short-term power balancing capacity can be achieved. However, it is critical to note that only short-term variations in wind power can be balanced by refrigeration load (Fig. 14.5), not long-term sustained variations (Fig. 14.8). Nevertheless, long-term sustained intra-dispatch wind power variations can be balanced by direct or automated control of commercial and/or industrial loads. For example, on São Miguel island, a shopping mall with large air-conditioners, cement factory with a substantial motor load for the cutting/grinding/sieving/mixing of raw material, a dairy farm that runs boilers, refrigeration loads in grocery stores, and laundry (washer, dryer) loads in hotels are potential candidates for the balancing of sustained intra-dispatch wind power variations. Particularly, air-conditioners can be employed for power balancing in ten of seconds or less. Their input power can be quickly adjusted through power electronics, and switching its operating state within a short period of time will not significantly affect the end user’s comfort level [8, 9].
Intra-dispatch demand response can cut down on reserve requirements. Besides, the response of small distributed inertia in the network can be much faster as compared to controlling the prime mover of the slow hydro unit or the fast but expensive diesel unit. Recently, modeling and control principles were introduced to support the implementation of demand response in frequency regulation in [10]. The authors refer to their model as Automatic Generation and Demand Control (AGDC). To plan balancing reserves for the future, the frequency response characteristics of smart loads in the Azores can be taken into account [11]. Also, there must be incentives for the consumer to buy frequency responsive Smart Appliances. This is due to the fact that there is much interest in beginning to rely on demand side response to compensate for hard-to-predict wind variations in the system.
10 Summary
A possible control design for cost-effective intra-dispatch real-power balancing is illustrated for two islands in the Azores. Wind speed variations span over multiple timescales. Our objective is to balance intra-10-min sustained deviations in wind power between two consecutive dispatch actions. Of particular interest is the balancing of nonzero mean energy offset in wind power from its forecast or scheduled value. A high degree of efficiency can be achieved if sustainable natural cycles of conventional generators align with those of wind fluctuations. Consequently, the system cost can be minimized and the quality of service enhanced. To increase system efficiency in the Azores, within a non-congested network, the natural timescales of diesel and hydro generator response must align with those of wind power deviations. Hence, for balancing purposes, conventional power plants available on the islands must be utilized judiciously. Economic and environmental sustainability can be increased seamlessly if this is done.
Based on the results for Flores, it is evident that a prudent approach is to balance error on a 10-min horizon through slow technology, i.e., a hydropower plant. By utilizing wind forecasts, the potential of slower technologies can be harnessed to correct real-power imbalances on longer time horizons. Then fast fringe fluctuations around the prediction error can be balanced by diesel power plants. The advantages are twofold. First, hydro is economically and environmentally sustainable. In addition, the wear and tear on an expensive diesel plant can be minimized. Figure 14.14 illustrates how much can be saved if the timescale of balancing resources aligns with the timescales of the wind variations. It represents cumulative cost over intra-dispatch time period of 10 min to follow wind variations on Flores (Fig. 14.8). As shown, it is much cheaper to balance sustained intra-dispatch wind variations with the sustainable and cheap hydropower plant (blue curve) than with the diesel generator (red curve). Cumulatively, the savings would be much more over the longer time horizons of months or years. Furthermore, additional savings can be achieved through intra-dispatch demand response. Other potential balancing resources include storage devices which are capable of responding much faster than conventional generators. New balancing resources, such as EVs, flywheels, and batteries, where the response rate is on a much shorter timescale, require decentralized approach proposed in this chapter and higher order models. More has been written about the storage devices in subsequent chapters.

Comparing cumulative cost over 10 min
Notes
- 1.
All variables represent deviations from their nominal values for a given equilibrium point.
References
J. Apt, The spectrum of power from wind turbines. J. Power Sources 169(2), 369–374 (2007)
N. Cohn, Control of Generation and Power Flow on Interconnected Power Systems (John Wiley and Sons Inc., New york, 1961)
M. Ilić, J. Zaborszky, Dynamics and Control of Large Electric Power Systems, Sons Inc., (John Wiley and Sons Inc., New york, 2000)
M. Calovic, Dynamic state-space models of electric power systems. Technical Report, University of Illinois, Urbana (1971)
J. Cardell, Integrating small scale distributed generation into a deregulated market: control strategies and price feedback. Doctoral Thesis, MIT (September 1997)
W.I. Rowen, Simplified mathematical representations of heavy duty gas turbines. J. Eng. Power Transactions of ASME 105, 865–869 (1983)
M. Ilić, S.X. Liu, Hierarchical Power Systems Control; Its Value in a Changing Industry (Springer, London, 1996)
Lawrence Berkeley National Laboratory, Demand Response Spinning Reserve Demonstration. (2007) certs.lbl.gov/pdf/62761.pdy
D. Bargiotas, J.D. Birdwell, Residential air conditioner dynamic model for direct load control. IEEE Trans. Power Deliv. 3, 2119–2126 (1988)
M. Ilić, N. Popli, Automatic generation and demand control (AGDC) for system with high wind penetration. Working Paper, Electric Energy System Group R-WP15, Carnegie Mellon University (July 2011)
M. Ilić, N. Popli, J.Y. Joo, Y. Hou, A possible engineering and economic framework for implementing demand side participation in frequency regulation at value, in IEEE Power Engineering Society General Meeting, 2011
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer Science+Business Media New York
About this chapter
Cite this chapter
Popli, N., Ilić, M. (2013). Modeling and Control Framework to Ensure Intra-dispatch Regulation Reserves. In: Ilic, M., Xie, L., Liu, Q. (eds) Engineering IT-Enabled Sustainable Electricity Services. Power Electronics and Power Systems, vol 30. Springer, Boston, MA. https://doi.org/10.1007/978-0-387-09736-7_14
Download citation
DOI: https://doi.org/10.1007/978-0-387-09736-7_14
Published:
Publisher Name: Springer, Boston, MA
Print ISBN: 978-0-387-09735-0
Online ISBN: 978-0-387-09736-7
eBook Packages: EngineeringEngineering (R0)