
Abstract
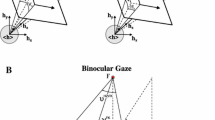
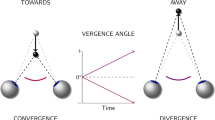
Vergence movement enables human and vertebrates, having stereo vision, to perceive the depth of an interesting visual target fixated by both left and right eyes. To simulate this on a binocular robotic camera head, we propose a new control model for vergence movement using disparity flux. Experimental results showed that this model is efficient in controlling vergence movement in various environments. When the perception-action cycle is short enough to approach to the real-time frame rate, the precision of disparity flux increases, and then a more accurate control of vergence movements on the stereo robotic head is possible.
To whom all correspondence should be addressed. This research was supported by Creative Research Initiatives of the Ministry of Science and Technology, Korea.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
A. Maki, T. Uhlin, J. O. Eklundh: Disparity Selection in Binocular Pursuit. In Proc. of IAPR Workshop on Machine Vision Applications, Kawasaki, Japan. (1994) 182–185
M. Hansen, G. Sommer: Real-Time Vergence Control using Local Phase Differences. Machine Graphics and Vision. 5 (1996) 51–63
J. H. Piater, R. A. Grupen, K. Ramamritham: Learning Real-Time Stereo Vergence Control. In Proc. of the 1999 IEEE International Symposium on Intelligent Control, Cambridge, MA. (1999)
C. Capurro, F. Panerai, G. Sandini: Dynamic Vergence Using Log-Polar Images. International Journal of Computer Vision. 24 (1997) 79–94
J. Batista, P. Pexixoto, H. Araujo: Real-Time Vergence and Binocular Gaze Control. IEEE/RSJ International Conference on Intelligent robotic system. (1997)
D. Coombs, C. Brown: Real-Time Binocular Smooth Pursuit. International Journal of Computer Vision. 11 (1993) 147–164
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2000 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Kim, HJ., Yoo, MH., Lee, SW. (2000). Dynamic Vergence Using Disparity Flux. In: Lee, SW., Bülthoff, H.H., Poggio, T. (eds) Biologically Motivated Computer Vision. BMCV 2000. Lecture Notes in Computer Science, vol 1811. Springer, Berlin, Heidelberg. https://doi.org/10.1007/3-540-45482-9_18
Download citation
DOI: https://doi.org/10.1007/3-540-45482-9_18
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-540-67560-0
Online ISBN: 978-3-540-45482-3
eBook Packages: Springer Book Archive