
Abstract
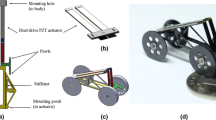
We measure the motion of a miniature robot and the trajectories of three legs. The robot consists of three stacked-type piezoelectric actuators connected in an equilateral triangle. The three legs, which support the main body of the robot, are fixed at every vertex of the triangle. The input waveforms applied to the piezos are rectangle and sinusoidal waveforms. We discuss the motion of the miniature robot and the trajectories of the legs under the conditions that the miniature robot can rotate or not.
Access provided by Autonomous University of Puebla. Download to read the full chapter text
Chapter PDF
Similar content being viewed by others


7 References
Akihiro Torii, Yoshiyuki Fukaya, Kae Doki, Akiteru Ueda, (2003) Motion of a Miniature Robot Using Three Piezoelectric Elements Controlled by Rectangular Voltage: Journal of Robotics and Mechatronics Vol. 15 No. 6. 602–608
Author information
Authors and Affiliations
Rights and permissions
Copyright information
© 2007 Springer-Verlag London Limited
About this paper
Cite this paper
Torii, A., Shimada, A., Doki, K., Ueda, A. (2007). A Precise Motion Measurement of a Miniature Robot Driven by the Deformation of Piezoelectric Actuators. In: Towards Synthesis of Micro-/Nano-systems. Springer, London . https://doi.org/10.1007/1-84628-559-3_17
Download citation
DOI: https://doi.org/10.1007/1-84628-559-3_17
Publisher Name: Springer, London
Print ISBN: 978-1-84628-558-5
Online ISBN: 978-1-84628-559-2
eBook Packages: EngineeringEngineering (R0)