
Abstract
The paper proposes a multiresolution cross-correlation analysis (MCCA) combining cross-correlation analysis of complex signals with multiresolution wavelet analysis, which provides decomposition of datasets at several resolution levels and processing of the obtained sets of detail wavelet coefficients. Such an approach can improve the interpretation of changes in the dynamics of the system under study, associating the occurring phenomena with the mechanisms responsible for them. The possibilities of MCCA are illustrated by the example of synchronous and asynchronous dynamics of the model of two interacting nephrons providing oscillations with two different time scales.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Correlation analysis is one of the most widely used traditional signal processing techniques [1]. Features of the correlation function in different regions (from short-range to long-range correlations) are applied to characterize various aspects of the complex dynamics of natural systems. Many diagnostic-related studies involve quantifying the power-law long-range correlations that often arise from the interplay of the deterministic and stochastic dynamics of such systems. Their description in terms of the classical correlation function is restricted by time-varying dynamics producing nonstationary behavior, or by the high rate of decay of this function, which leads to significant computation errors in the region where it tends to zero. To avoid such circumstances and improve the characterization of long-range correlations, an approach based on the detrended fluctuation analysis [2, 3] was proposed and applied in various fields [4,5,6]. The latter approach operates with signal profiles and introduces growing functions whose power-law behavior can be easily quantified in terms of scaling exponents. The applicability of this approach to datasets containing trends or other types of nonstationarity has been discussed in several studies [7,8,9,10].
In addition to scalar signal processing, a similar analysis is able to quantify cross-correlations between multiple data sets, measured, e.g., in the dynamics of interacting systems or networks. For stationary dynamics, the conventional cross-correlation function is used. The nonstationary behavior of natural systems with time-varying parameters creates difficulties in interpreting the corresponding estimates, and other numerical techniques become preferable. In particular, a revised version of the DFA, called detrended cross-correlation analysis (DCCA), has been proposed to study the cooperative dynamics of interacting units with time-varying behavior [11, 12]. In our recent paper [13], we proposed to extend this method to the case when the nonstationarity varies significantly across datasets, such as transients between different states of the system under consideration.
A common problem with the cross-correlation function in its conventional approach or alternatives is to quantify relationships between signals that do not exhibit power-law cross-correlations when the estimated functions have different slopes at distinct ranges of scales. A possible way is to introduce local scaling exponents instead of one (global) quantity, which will describe distinctions in correlations for different time scales. To increase the information content of such a consideration, this paper proposes the MCCA approach, when cross-correlation analysis is combined with multiresolution wavelet-analysis of complex signals [14,15,16]. The latter method decomposes signals according to a pyramidal scheme to separately study their features in independent ranges of scales or frequencies and introduces sets of expansion coefficients at different resolution levels, reflecting the fluctuations in the original signal in different sub-bands. The performed decomposition makes it possible to more clearly interpret changes in the system dynamics associated with specific frequency domains, compared to the processing of the original datasets. In other words, it is proposed to carry out a cross-correlation analysis of the wavelet-coefficients related to each subsequent resolution level and reflecting the signal features in a certain frequency band. The latter enables to determine levels with stronger cross-correlations and, in the case of complex systems composed of several subsystems operating in distinct frequency ranges, to establish a link between the observed phenomena and the subsystem responsible for the corresponding dynamics. This study is based on a model of interacting nephrons [17, 18], which is a rather complex system showing various types of synchronous and asynchronous oscillations with two different time scales, each associated with a specific physiological control mechanism.
The paper is organized as follows. Section 2 briefly describes the proposed MCCA approach and the model of two paired nephrons used to create datasets that reflect various types of complex dynamics of this model. Section 3 describes the main results of applying the proposed approach to phase-locked synchronous and asynchronous chaotic oscillations of the model. Section 4 summarizes the concluding remarks.
2 Methods
2.1 MCCA approach
The proposed MCCA approach performs signal processing in two stages. At the first stage, the signal x(t) is decomposed in the framework of the standard procedure of multiresolution wavelet-analysis [14] as
where \(\varphi _{j,l}\) and \(\psi _{j,l}\) are low- and high-pass filter banks created by dilations with the factor \(2^j\) and integer translations l of the scaling function \(\varphi (t)\) and wavelet \(\psi (t)\), \(j_n\) is the a priori chosen resolution level, \(s_{j,l}\) and \(d_{j,l}\) are the approximation and detail coefficients. Several steps of this procedure are carried out to cover all available resolution levels j and obtain several sets of detail coefficients \(d_{j,l}\), each associated with a certain range of scales. \(D^8\) wavelet of the Daubechies family was used to decompose the signal.
At the second stage, each set is treated as a signal, which is subjected to further processing. Thus, dealing with two systems or subsystems with numbers I and II, we can estimate the cross-correlation function
where \({\hat{d}}_j^I\) and \({\hat{d}}_j^{II}\) are average values, m is much less than the number of decomposition coefficients J at the level j, and M=\(J-\max (m)\).
2.2 Model of two paired nephrons
The model of two paired nephrons [17, 18] is a quite complicated example of coupled oscillators providing a mathematical description of the interaction of functional units of the kidney, which is in good agreement with physiological assumptions and experimental data. In particular, the model makes it possible to describe the transition from periodic oscillations to chaotic modes with an increase in blood pressure (renal hypertension), which is known in renal physiology [19, 20], as well as distinctions in synchronization phenomena for normotensive and hypertensive animals [21, 22]. From the point of view of the current study, this example represents a stage between a simple mathematical description of biological oscillators and their real dynamics. On the one hand, this makes it possible to apply the proposed mathematical approaches to really complex simulated dynamics. On the other hand, this dynamics is still much simpler compared to natural systems, where additional complexity is associated with noise, artifacts, time-varying behavior due to changes in environmental conditions, etc. Therefore, the features of the proposed method can be clearly illustrated.
The nephron is the functional unit of the kidney that produces self-sustained oscillations in the proximal intratubular pressure, distal intratubular pressure, and chloride concentration near the terminal part of the loop of Henle, caused by two different mechanisms. The first (main) mechanism is the tubuloglomerular feedback, which is responsible for slow oscillations (30–40 s according to experiments in rats [19, 20]). These oscillations are almost periodic in normotensive animals and very irregular (chaotic) in renal hypertension. The second mechanism is the myogenic dynamics of the afferent arteriole leading to oscillations with a typical period of 5–10 s and a lower amplitude. Both of these mechanisms act on the same afferent arteriole and, therefore, changes in one of them affect the other.
A single nephron is described by six ordinary differential equations [17]
Model (3) involves many nonlinear functions and parameters, and their thorough description takes several pages. In this regard, only the main aspects are reproduced in the current paper (additional details can be found in [17, 18]). The variable \(P_t\) is the proximal tubular pressure, \(F_f\) defines the rate of the glomerular filtration, \(C_{tub}\) quantifies the tubular elastic compliance, \(P_d\) is the distal tubular pressure. For simplicity, reabsorption \(F_{reab}\) is assumed to be constant. The following two equations describe the behavior of arteriolar blood flow, namely r and \(v_r\) are the vessel radius and its rate of variations, respectively. The quantities d and \(\omega\) are the damping coefficient and the relative mass measure. \(P_{av}\) and \(P_{eq}\) are the mean arteriolar pressure and its value for the equilibrium state; \(\Psi\) is the muscular activation. \(F_f\), \(P_{av}\) and \(P_{eq}\) are estimated from solutions of algebraic equations, which are considered in addition to the integration of differential equations. The last three equations of model (3) are introduced to define the time delay T in the tubuloglomerular feedback, which is an important quantity strongly affecting the dynamics of the model. The development of chaotic dynamics can be simulated by increasing the strength of feedback regulation (parameter \(\beta\)).
The model of paired nephrons includes two systems (3) with additional terms and equations for the coupling [23]. Thus, the vascularly propagated coupling is defined by taking into account the contribution of the activation level in one unit to the activation level in another unit:
where \(\gamma\) determines the coupling strength, \(\Psi _{1,2}\) are the activation levels of both nephrons. The values \(\gamma =0.005\), \(\beta =27.3\) are selected (other parameters are taken according to [17]). For the purpose of individual study of fast and slow oscillations for each nephron, two sequences of return times to the Poincaré sections \(v_r=0\) and \(P_t=1.6\) kPa were considered. Synchronous chaotic dynamics was studied at feedback delays \(T_1=T_2=13.5\) s, asynchronous chaotic oscillations were investigated at \(T_1=13.5\) s, \(T_2=13.4\) s.
3 Results and discussion
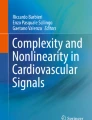
The dynamics of model (3) was studied for the case of chaotic dynamics, where two different time scales are clearly distinguished, namely, slow oscillations with a frequency of about 0.03 Hz and fast oscillations in the range of 0.1–0.2 Hz. Consideration of the variables r and \(v_r\) allows us to analyze the fast rhythm, while the variables \(X_1\), \(X_2\) and \(X_3\) reflect the slow dynamics. Time dependencies for the variable \(P_t\) allow visual recognition of both rhythmic components (Fig. 1). The transition from time series of model variables to sequences of return times is a way to keep the most important information about the internal structure of chaotic attractors, which can be used for diagnostic purposes.

An example of a signal (a) and the corresponding phase portrait (b) of a chaotic attractor in nephron model
In the dynamics of coupled nephrons, different types of entrainment phenomena occur, including cases of in-phase and out-of-phase inter-nephron synchronization, full and partial synchronization of paired functional units of the kidney, and entrainment between regulatory mechanisms in individual units (intra-nephron synchronization) [23]. Due to this, a separate analysis of the fast and slow modes for each nephron makes it possible to identify various changes in the dynamics of the model (3) caused by variations in the control parameters.
Let us consider how the proposed MCCA approach expands the possibilities of characterizing changes in the cross-correlation properties of the model dynamics. Figure 2 shows the results of a cross-correlation analysis of the slow dynamics associated with the tubulo-glomerular feedback mechanism for the case of synchronous and asynchronous dynamics depending on the resolution level. The strongest values of \(C_j(0)\) are obtained for the first level (\(j=1\)), and they clearly differ for the regimes under study. Similar values of \(C_j(0)\) for \(j>1\) (Fig. 2, inset) are much smaller, although their comparison gives an interesting observation: \(C_j(0)\) for \(j>1\) can take about 150–200 times stronger values for synchronous oscillations than for asynchronous dynamics. At the level \(j=1\) this ratio is about 18 times. Thus, taking into account different ranges of scales gives additional information about the dynamics under study and extends the possibilities for diagnosing changes in dynamics. In this analysis, the behavior of the cross-correlation function at \(m=0\) was more informative than the behavior of this function at increasing m. In this regard, the figures show \(C_j(0)\).

MCCA analysis of the slow dynamics associated with the tubulo-glomerular feedback mechanism depending on the resolution level
For fast (myogenic) dynamics of coupled nephrons, less pronounced distinctions are observed at \(j=1\) (Fig. 3), and the values of \(C_1(0)\) are much closer than for slow dynamics. This is due to the choice of the asynchronous regime near the region of partial synchronization. However, an important observation can be made for \(j=3\) (Fig. 3, inset), where \(C_3(0)\) is much stronger for synchronous regime. The latter can be explained by the reflection of the tubulo-glomerular feedback mechanism. Due to the interaction of the two regulatory mechanisms, the slow dynamics is reflected in the fast variables of the model (3). The case \(j=3\) is related to the frequency ratio 1/4–1/8 of the case \(j=1\). Taking into account that the typical frequency ratios for slow and fast dynamics of an individual nephron are 1/4 or 1/5, the synchronization of slow oscillations affects the change in cross-correlations at \(j=3\). The given example is an illustration of the advantages of considering cross-correlations depending on the resolution level in comparison with the analysis of complete datasets without their multiresolution analysis.

MCCA analysis of the fast dynamics associated with the myogenic mechanism depending on the resolution level
4 Conclusion
To increase the information content of cross-correlation analysis of complex signals with multiple rhythmic components, it is proposed to combine the study of correlation properties with multiresolution wavelet analysis. The MCCA approach includes decomposition of datasets at distinct resolution levels (independent frequency ranges) with subsequent processing the detail coefficients related to each level. The advantage of this approach is a better interpretation of the ongoing changes in the dynamics of the system under study and the relationship between the observed changes and the mechanisms associated with them. Using a model of two interacting nephrons, it is shown how this approach expands the possibilities of characterizing changes in cross-correlation properties in terms of distinctions between synchronous and asynchronous oscillations associated with the mechanism of tubulo-glomerular feedback and myogenic dynamics of individual functional units of the kidneys. This approach can have various signal processing applications.
Data availability statement
The datasets generated during and/or analysed during the current study are available from the corresponding author on reasonable request.
References
J.S. Bendat, A.G. Piersol, Random Data: Analysis and Measurement Procedures, 4th edn. Wiley, (2010)
C.-K. Peng, S.V. Buldyrev, S. Havlin, M. Simons, H.E. Stanley, A.L. Goldberger, Phys. Rev. E 49, 1685 (1994)
C.-K. Peng, S. Havlin, H.E. Stanley, A.L. Goldberger, Chaos 5, 82 (1995)
H.E. Stanley, L.A.N. Amaral, A.L. Goldberger, S. Havlin, P.Ch. Ivanov, C.-K. Peng, Physica A 270, 309 (1999)
W. Kantelhardt, E. Koscielny-Bunde, H.H.A. Rego, S. Havlin, A. Bunde, Physica A 295, 441 (2001)
N.S. Frolov, V.V. Grubov, V.A. Maksimenko, A. Lüttjohann, V.V. Makarov, A.N. Pavlov, E. Sitnikova, A.N. Pisarchik, J. Kurths, A.E. Hramov, Sci. Rep. 9, 7243 (2019)
K. Hu, P.Ch. Ivanov, Z. Chen, P. Carpena, H.E. Stanley, Phys. Rev. E 64, 011114 (2001)
Z. Chen, P.Ch. Ivanov, K. Hu, H.E. Stanley, Phys. Rev. E 65, 041107 (2002)
R.M. Bryce, K.B. Sprague, Sci. Rep. 2, 315 (2012)
Y.H. Shao, G.F. Gu, Z.Q. Jiang, W.X. Zhou, D. Sornette, Sci. Rep. 2, 835 (2012)
B. Podobnik, H.E. Stanley, Phys. Rev. Lett. 100, 084102 (2008)
B. Podobnik, I. Grosse, D. Horvatić, S. Ilic, P.Ch. Ivanov, H.E. Stanley, Eur. Phys. J. B 71, 243 (2009)
A.N. Pavlov, O.N. Pavlova, A.A. Koronovskii Jr., G.A. Guyo, Chaos. Solitons Fractals 157, 111972 (2022)
Y. Meyer, Wavelets: Algorithms & Applications. Society for Industrial and Applied Mathematics, (1993)
S. Mallat, A Wavelet Tour of Signal Processing: The Sparse Way, 3rd Edition. Academic Press (2008)
P.S. Addison, The Illustrated Wavelet Transform Handbook: Introductory Theory and Applications in Science, Engineering, Medicine and Finance, 2nd Edition. CRC Press (2017)
M. Barfred, E. Mosekilde, N.-H. Holstein-Rathlou, Chaos 6, 280 (1996)
E. Mosekilde, Topics in nonlinear dynamics: Applications to physics, biology and economic systems. World Scientific (1996)
N.-H. Holstein-Rathlou, P.P. Leyssac, Acta Physiol. Scand. 126, 333 (1986)
P.P. Leyssac, N.-H. Holstein-Rathlou, Pflügers Arch. 413, 267 (1989)
O.V. Sosnovtseva, A.N. Pavlov, E. Mosekilde, N.-H. Holstein-Rathlou, Phys. Rev. E 66, 061909 (2002)
O.V. Sosnovtseva, A.N. Pavlov, E. Mosekilde, K.-P. Yip, N.-H. Holstein-Rathlou, D.J. Marsh, Am. J. Physiol. Renal Physiol. 293, F1545 (2007)
D.E. Postnov, O.V. Sosnovtseva, E. Mosekilde, N.-H. Holstein-Rathlou, Int. J. Modern Phys. B 15, 3079 (2001)
Acknowledgements
This work was supported by the Russian Science Foundation (Agreement 22-22-00065), https://rscf.ru/en/project/22-22-00065/.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Pavlov, A.N. Cross-correlation analysis at multiple resolutions. Eur. Phys. J. Spec. Top. 232, 609–613 (2023). https://doi.org/10.1140/epjs/s11734-022-00715-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1140/epjs/s11734-022-00715-2