
Abstract
In this paper, an experimental validation of some modelling aspects of an uncontrolled bicycle is presented. In numerical models, many physical aspects of the real bicycle are considered negligible, such as the flexibility of the frame and wheels, play in the bearings, and precise tire characteristics. The admissibility of these assumptions has been checked by comparing experimental results with numerical simulation results.
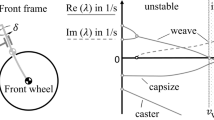
The numerical simulations were performed on a three-degree-of-freedom benchmarked bicycle model. For the validation we considered the linearized equations of motion for small perturbations of the upright steady forward motion. The most dubious assumption that was validated in this model was the replacement of the tires by knife-edge wheels rolling without slipping (non-holonomic constraints).
The experimental system consisted of an instrumented bicycle without rider. Sensors were present for measuring the roll rate, yaw rate, steering angle, and rear wheel rotation. Measurements were recorded for the case in which the bicycle coasted freely on a level surface. From these measured data, eigenvalues were extracted by means of curve fitting. These eigenvalues were then compared with the results from the linearized equations of motion of the model. As a result, the model appeared to be fairly accurate for the low-speed low-frequency behaviour.
Article PDF
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
References
Biral, F., Bortoluzzi, D., Cossalter, V., Da Lio, M.: Experimental study of motorcycle transfer functions for evaluating handling. Veh. Syst. Dyn. 39, 1–25 (2003)
Blue Team. http://www.roboticinfantry.com/
Cossalter, V., Lot, R., Maggio, F.: The modal analysis of a motorcycle in straight running and on a curve. Meccanica 39, 1–16 (2004)
Döhring, E.: Über die Stabilität und die Lenkkräfte von Einspurfahrzeugen. Ph.D. thesis, Technical University Braunschweig, Germany (1953)
Döhring, E.: Die Stabilität von Einspurfahrzeugen. Automob. Tech. Z. 56(3), 68–72 (1954)
Eaton, D.J.: Man–machine dynamics in the stabilization of single-track vehicles. Ph.D. thesis, University of Michigan (1973)
Jackson, A.W., Dragovan, M.: An experimental investigation of bicycle dynamics. Unpublished manuscript (1998)
Kooijman, J.D.G.: Experimental validation of a model for the motion of an uncontrolled bicycle. M.Sc. thesis, Delft University of Technology, April 2006. http://tam.cornell.edu/~als93/Koo06.pdf
Limebeer, D.J.N., Sharp, R.S.: Bicycles, motorcycles and models. IEEE Contr. Syst. Mag. 26(5), 34–61 (2006)
Miyagishi, S., Kageyama, I., Takama, K., Baba, M., Uchiyama, H.: Study on construction of a rider robot for two-wheeled vehicle. JSAE Rev. 24(3), 321–326 (2003)
Rice, R.S., Roland, R.D.: An evaluation of the performance and handling qualities of bicycles. Cornell Aero. Lab. Report No. VJ-2888-K (1970)
Rice, R.S.: Accident avoidance capabilities of motorcycles. In: Proceedings International Motorcycle Safety Conference, 16–17 December 1975, USDOT, pp. 121–134. National Highway Traffic Safety Administration, Washington (1975)
Roland, R.D.: Computer simulation of bicycle dynamics. In: Bleustein, J.L. (ed.) Mechanics and Sport. AMD, vol. 4, pp. 35–83. ASME, New York (1973)
Roland, R.D., Lynch, J.P.: Bicycle dynamics, tire characteristics and rider modeling. Cornell Aero. Lab. Report No. YA-3063-K-2 (1972)
Roland, R.D., Massing, D.E.: A digital computer simulation of bicycle dynamics. Cornell Aero. Lab. Report No. YA-3063-K-1 (1971)
Ruijs, P.A.J., Pacejka, H.B.: Recent research in lateral dynamics of motorcycles. In: Proceedings of the 9th IAVSD Symposium held at Linköping University, Linköping, Sweden, 24–28 June 1985, pp. 467–480 (1986)
Schwab, A.L., Meijaard, J.P., Papadopoulos, J.M.: Benchmark results on the linearized equations of motion of an uncontrolled bicycle. KSME Int. J. Mech. Sci. Technol. 19(1), 292–304 (2005)
Suhr, W.: Entwicklung und Erprobung eines nichtlinearen dynamischen Fahrradmodells, excerpts from a Ph.D. thesis, University of Oldenburg, Germany (1992)
Video recording of a test run. http://tam.cornell.edu/~als93/bicycledyn.htm#May24
Wächter, M.: Eine experimentelle Überprüfung des dynamischen Fahrradmodells. M.Sc. thesis, University of Oldenburg, Germany (1991)
Weir, D.H., Zellner, J.W.: Lateral–directional motorcycle dynamics and rider control. Technical report No. 780304, Society of Automotive Engineers, Warrendale, PA (1978)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This is an open access article distributed under the terms of the Creative Commons Attribution Noncommercial License ( https://creativecommons.org/licenses/by-nc/2.0 ), which permits any noncommercial use, distribution, and reproduction in any medium, provided the original author(s) and source are credited.
About this article
Cite this article
Kooijman, J.D.G., Schwab, A.L. & Meijaard, J.P. Experimental validation of a model of an uncontrolled bicycle. Multibody Syst Dyn 19, 115–132 (2008). https://doi.org/10.1007/s11044-007-9050-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11044-007-9050-x