
Abstract
The precision in predicting the Earth Orientation Parameters by the least squares method is statistically analyzed. The prediction involves assessment of the polynomial coefficients approximating the evolution of the polar motion and the irregularity of Earth’s rotation. Optimal approximating polynomials and approximation intervals corresponding to the greatest statistical accuracy of prediction over the specified time interval are determined. The proposed algorithms are analyzed on the basis of historical data regarding the evolution of the Earth Orientation Parameters over many years, and the accuracy levels attained in prediction are identified.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
In navigation, a central problem is to determine the Earth’s Orientation Parameters (EOP), including the polar motion xp, yp and the irregularity of the Earth’s rotation in the form of the discrepancy between universal time (UT) and Coordinated Universal Time UTC [1]. In practice, precise determination of these parameters is impossible, on account of their continuous evolution.
At present, the EOP are determined by the analysis of data from Very Long Baseline Interferometry and laser range finding. This method of parameter refinement is recommended by the International Earth Rotation and Reference Systems Service (IERS) and is generally very accurate. The results have been used in all existing applications, including satellite-based global positioning systems. That is associated with the need for precise determination of the Earth’s orientation relative to an inertial coordinate system in calculating spacecraft ephemeris.
Because precise estimates of EOP must be constantly updated, users of this information must regularly load recent data in their applications. This factor needs autonomous operation and also reveals a dependence on the supply infrastructure for such data. At the absence of rapid values of EOP, the only means of estimating future values is prediction of the basis of polynomial models describing the evolution of the coordinates of the terrestrial pole and time correction between the UT1 and UTC scales. The model proposed by IERS for extrapolation of these parameters is prediction of the Earth orientation parameters with some precision. However, doubt remains regarding the accuracy of the predicted EOP and their navigational applicability.
Since the need for accurate prediction of those parameters was first recognized, numerous attempts have been made to improve the prediction technology, including optimization of the polynomials describing the parameter variation; selection of an approximation method for the data used in refining the polynomials, and developing new or modified prediction methods (autoregression, singular spectrum analysis, Kalman’s filtering, least squares methods, neural-network models, etc.).
Note that the prediction of the EOP has been analyzed in detail in [2–4]. The corresponding prediction results have been fair (12.3 mas for the polar motion over a period of up to 40 days; and 53.6 ms for the irregularity of the Earth’s rotation over a period of up to 40 days) [2]. Nevertheless, their practical use is hindered by lack of clearly articulated procedures, incomplete formulation of the final algorithms, extreme complexity of the methods proposed, and overloading of the mathematical tools employed.
In addition, for some methods, researchers doubt that the high accuracy of the results may be repeated, for lack of verification of historical data by a posteriori analysis. In other words, in terms of fundamental discussed problem solution, the accumulated research findings include much useful information, but the parameters of the prediction technology must be further specified if it is necessary to directly apply it in navigation infrastructure.
RESEARCH OUTLINE
The research objective is to find a method of predicting the EOP that is simple for computer (or spacecraft) use but provides a result consistent with the available data and meeting the required confidence level. The proposed approach is based on least squares method to assess the parameters of the polynomial describing EOP by the approximation of posterior data.
The following steps are employed: approximation models of parameter series selection; approximation models changing, approximation length, and prediction intervals, with the formulation of tables of polynomial coefficients by the least squares method; analysis of the precision estimates in comparison of posterior data for long-term parameter series in the IERS model with their predicted evolution.
Thus, the proposed procedure yields a set of \(\Delta {{x}^{{0.95}}}\) data, a set of errors in predicting EOP at a confidence level of 0.95. We need to find the minimum of this set
where \(\Delta {{x}^{{0.95*}}}\)is the minimum error in predicting EOP (xp, yp, ΔUT) at a confidence level of 0.95 over a multiyear segment of statistical data; \(g\left( {t,...} \right)\) is form of evolution approximating function of EOP; l is number of days considered in least squares analysis to assess the function coefficients \(g\left( {t,...} \right)\) used for subsequent predictions and k is number of days in prediction for which \(\Delta {{x}^{{0.95}}}\) must be minimized.
PARAMETER SERIES APPROXIMATING MODEL SELECTION
The most common polynomial model for the long-term evolution of EOP was proposed by the United States National Geospatial-Intelligence Agency (NGA)
where coefficients \(A,B,{{C}_{n}},{{D}_{n}},E,F,{{G}_{n}},{{H}_{n}},I,J,\) \({{K}_{n}},{{L}_{n}},{{R}_{1}},{{R}_{2}},\,\)\({{T}_{a}},{{T}_{b}}\) are estimated by the least squares method; T is date for which prediction is required (MJD); \({{P}_{1}},{{Q}_{1}},{{R}_{3}}\) is duration of a sidereal year; \({{P}_{2}},{{Q}_{2}}\) is Chandler cycle; \({{R}_{1}}\) is lunar cycle; \({{R}_{2}}\) is semi-lunar cycle; and \({{R}_{4}}\) is semiannual cycle.
This model is widely used [5, 6]. Nevertheless, for short-term prediction, we will now consider a truncated model based on Eq. (1), containing only linear components of EOP.
POLYNOMIAL COEFFICIENTS TABLES
To assess accuracy in predicting EOP on basis of their true values, we approximate true values in final IERS C04 bulletins by assessing coefficients in Eq. (1). We select following parameters: data set employed includes set of C04 bulletins with final data regarding polar motion xp, yp and irregularity of the Earth’s rotation ΔUT formulated over ten years (from 2008 to the beginning of 2019); prediction intervals (segments of 5–90 days) and the time corresponding to approximation of parameter estimates by the least squares method, which is 14–1778 days (with seven-day increments) for Eq. (1) and 1–30 days (with one-day increments) for linear section.
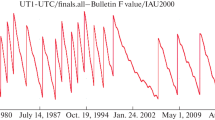
Experiments show that the approximation period must be varied in order to select model parameters that are optimal in terms of accuracy in predicting EOP. In other words, optimal approximation period in the sense here considered (at a confidence level of 0.95) is variable and cannot be determined or selected by a universal method for any prediction interval. An example of polynomial model for xp and UTC is shown in Fig. 1. Since the evolution of polar motion is the same, there is no need for separate consideration of yp.

Dependence of prediction errors for xp (a, c) and ΔUT (b, d) at a confidence level of 0.95 on approximation interval for predictions over 5 (—), 10 (⋅⋅⋅⋅), 15 (- - - -), 20 (– – –), 30 (– ⋅ –), 60 (– –), and 90 (– ⋅ –) days on the basis of polynomial model (a, b) and linear model (c, d).
Results analysis shows that the error of Eq. (1) fluctuates with length of approximation segment. Local maximums and minimums of the prediction error are seen, corresponding to specifics of harmonic parameter evolution. For linear approximation of EOP, analysis shows that, in contrast to Eq. (1), error curve is smoother in linear prediction with refinement of coefficients, and distinct global minimum is seen.
In each case, an optimal approximation interval in terms of minimal prediction error (at a confidence level of 0.95) may be determined from the curves. On the basis of results over short intervals (up to 20 days), it is more expedient in terms of accuracy to use only linear part of harmonic function in Eq. (1).
Thus, in the interests of minimizing prediction error, we must not only select appropriate length of approximation interval on the basis of statistical data for previous years but also adjust type of functions, with refinement of its coefficients by least squares method on the basis of practical data. We now combine functions and approximation intervals corresponding to minimum error for various future periods. Table 1 shows estimates xp, yp (mas) evolution and ΔUT (ms) at a confidence level of 0.95. Number of days of approximation corresponding to the minimal result is shown in parentheses.
Figure 2, as an example, shows prediction error with variation in approximating function and approximation interval. As its characteristics deteriorate at large times, one can see a pronounced transition from linear model to polynomial one in Eq. (1).

Minimal error in predicting xp (a), yp (b), and ΔUT (a, b) as a function of prediction span (days) in case of linear model (1), polynomial model (2) and minimal value (3).
CONCLUSIONS
(1) A selection procedure for optimal parameters in predicting polar motion and the irregularity of the Earth’s rotation by the least squares method was developed.
(2) Analysis of proposed models shows that prediction error may be minimized for different approximation intervals, at a confidence level of 0.95. In predictions over 20 days or less, linear model gives the best results. In predictions over 20–90 days, polynomial model is more preferable.
(3) In case of minimum prediction errors, corresponding approximation intervals in determining polynomial coefficients by the least squares method and polynomial form are defined.
(4) Analysis was verified statistically over many years period and provides the basis for accuracy determining in predicting the Earth Orientation Parameters in navigation systems and in spacecraft trajectories calculation.
REFERENCES
Grechkoseev, A.K., Krasil’shchikov, M.N., Kruzhkov, D.M., and Mararescul, T.A., Refining the Earth orientation parameters onboard spacecraft: concept and information technologies, J. Comput. Syst. Sci. Int., 2020, vol. 59, no. 4, pp. 598–608.
Zotov, L.V., Xu, X.Q., Skorobogatov, A., and Zhou, Y.H., Combined SAI-SHAO prediction of Earth orientation parameters since 2012 till 2017, Geodesy Geodyn., 2018, vol. 9, no. 6, pp. 485–490.
Gorshkov, V.L. and Miller, N.O., Forecasting of the Earth rotation parameters using singular spectral analysis, Izv. Gl. Astron. Obs., 2009, vol. 219, no. 1, pp. 91–100.
Malkin, Z.M. and Tissen, V.M., Accuracy assessment of the SNIIM method for predicting the parameters of the Earth rotation, Vestn. S.-Peterb. Univ., Ser. 1: Mat., Mekh., Astron., 2012, no. 3, pp. 143–152.
National Geospatial-Intelligence Agency (NGA) standardization document, World Geodetic System 1984, version 1.0.0, 2014. http://earth-info.nga.mil/GandG/publications/NGA_STND_0036_1_0_0_WGS84/NGA.STND.0036_1.0.0_WGS84.pdf. Accessed September 10, 2019.
Vallado, D.A., Fundamentals of Astrodynamics and Applications, New York: Springer-Verlag, 2007.
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated by B. Gilbert
About this article

Cite this article
Kozorez, D.A., Kruzhkov, D.M., Kuznetsov, K.V. et al. Predicting the Earth Orientation Parameters by the Least Squares Method. Russ. Engin. Res. 40, 1124–1127 (2020). https://doi.org/10.3103/S1068798X20120357
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S1068798X20120357