
Abstract
Transmissions that ensure torsional vibrations of a spindle are considered. They are easily integrated into individual machine components.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Structures that produce torsional vibrations of a spindle are relatively simple to integrate into the drive system of machine tools, as additional components [1]. However, we need a more efficient approach to the generation of torsional vibrations of a spindle, especially in drilling [2]. Analysis of the patent literature has shown that no such transmissions for torsional vibrations exist [2]. To simplify the generation of torsional vibrations, it is desirable to use existing drive components in the machining system, without unnecessarily complicating the design.
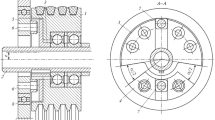
In Fig. 1, we show a suitable drive design [3]. It is based on a transmission structure [4]. Specifically, it employs the pulley of a V-belt drive in a regular spindle drive. Key 2 and nut 3 of extreme disk 5 are attached to spindle 4. Disk 1, which acts as a drive pulley, may turn relative to spindle 4. One end of its shaft 6 is connected to the slot in extreme disk 5 through pin 7 and associated slide block 8. Gear 10 is attached to the opposite end of the shaft by means of key 9. Gear 10 engages with the internal crown of gear 11, which is rigidly connected to housing 12. Block 8 is fixed in the slot of extreme disk 5 by strap 13, attached by screws 14.

Integrated vibrational drive with gear transmission.
Rotation of the electric motor’s shaft is transmitted by the belt transmission to disk 1, which consequently rotates relative to the spindle. Shaft 6, turning together with disk 1, transmits this motion through pin 7 and slide block 8 to extreme disk 5. The position of block 8, which transmits the rotation, determines the gear ratio of disks 1 and 5.
Correspondingly, rotation of shaft 6 relative to the spindle shaft leads to rotation of gear 10, which transmits additional motion—rotation around its axis—to shaft 6 through gear 11. As a result of this rotation, block 8 begins to oscillate in the slot of extreme disk 5, as in a slide system. In aggregate, uniform motion is transferred from disk 1 to disk 5. The vibrational frequency of disk 5 and hence the spindle is determined by the relative speed of gear 10. By changing the diameter of gear 10, the frequency of torsional vibrations of the spindle may be modified. By changing the eccentricity of pin 7 relative to the axis of gear 10, the amplitude may be modified.
The minimum angular velocity of the extreme disk 5 and hence the spindle is
where ω0 is the angular velocity of disk 1; z1 is the number of teeth in gear 10; m is the module of the gear engagement; e is the eccentricity of pin 7; and r is the radius of shaft 6 relative to the axis of spindle 4.
The maximum angular velocity of the spindle is
The transmission may be simplified as follows, with the elimination of gears 10 and 11 [5] (Fig. 2). Using the bore of drive pulley 1, disks 2 and 5 (in the form of sectors) may be placed in the same plane, resulting in a more compact design. The disks are installed with angular gap δ/2, thereby doubling their relative rotation. In this transmission, the pulley is set in rotary motion by the electric motor, acting through a belt transmission. This is accompanied by free rotation of disk 1 relative to the spindle. The radial slot of disk 2 acts through block 3 and pin 4 on auxiliary disk 2, which begins to rotate. In turn, disk 5 acts through pin 6 and block 7 on the radial slot of disk 5, setting it in motion. This rotation is transmitted to spindle 8. The proposed vibrational drive is highly reliable and permits the transfer of torsional vibrations to the spindle as a result of the relative rotation of disks 2 and 5.

Transmission with disk (drive pulley).
To permit adjustment of the vibration parameters and thus expansion of the spindle capability, the transmission in Fig. 3 was proposed in [6]. In this design, auxiliary disk 1 is mounted on rocker spindle 2 in frame 3, which may move linearly with respect to housing 4 by an amount equal to the eccentricity of disk 1. Frame 3 is connected by screw 5 and nut 6 to housing 4 (Fig. 3, view B).

Controllable vibrational drive.
If the center of auxiliary disk 1 is in a fixed position relative to the spindle axis, the amplitude of spindle vibration is unchanged. The position of disk 1 in Fig. 3, with its center at the spindle axis, corresponds to maximum amplitude of the spindle’s torsional vibrations. Displacement of the disk axis perpendicular to the spindle axis by means of screw pair 5–6 decreases the vibrational amplitude eventually to zero.
The transmission in Fig. 4 combines the properties of a drive producing torsional vibrations of the spindle and gear system with a large gear ratio [7]. This interesting design is based on a combination of disks. The input shaft 1 is mounted in roller bearings and is integrated with eccentric 2. Spur gear 3 is freely mounted on the eccentric. Pin 4 presses against gear 3, which engages with the gear crown of epicycle 5. Slide block 6 in the radial slot of disk 7 is freely mounted on pin 4. Disk 7 is integrated with spindle 8, mounted in roller bearings 9.

Stepdown vibrational transmission.
This spindle unit permits decrease in the output shaft with a gear ratio up to i = 20.
As gear 3 rotates with respect to epicycle 5, pin 4 moves over a truncated hypocycloid. Hence, as motion is transmitted from pin 4 to disk 7 by the combination of the pin and radial slot (a slide transmission), disk 7 rotates with torsional vibration. As a result, the system has broad functional capabilities.
The calculation method for a three-disk transmission used in all of the designs here described may be found in [8].
REFERENCES
Ryzvanovich, A.Ya., Generalov, V.A., and Kapralov, V.V., Vibrational machining with torsional spindle vibrations, Russ. Eng. Res., 2016, vol. 36, no. 9, pp. 717–721.
Kumabe, J., Vibration Cutting, Tokyo: Jikkyou Press, 1979.
Kropp, A.E., Ryzvanovich, A.Ya., Kasatkin, M.I., Kozyrev, O.S., and Shaposhnikov, A.V., USSR Inventor’s Certificate no. 865 548, 1981.
Kropp, A.E., Kasatkin, M.I., Ryzvanovich, A.Ya., Kozyrev, O.S., Dryanichev, Yu.A., and Erochkin, M.P., USSR Inventor’s Certificate no. 655481, 1979.
Kropp, A.E., Kasatkin, M.I., Kozyrev, O.S., and Ryzvanovich, A.Ya., USSR Inventor’s Certificate no. 961 867, 1982.
Kropp, A.E., Kasatkin, M.I., Kozyrev, O.S., and Ryzvanovich, A.Ya., USSR Inventor’s Certificate no. 997 989, 1983.
Kropp, A.E., Ryzvanovich, A.Ya., Kozyrev, O.S., and Kasatkin, M.I., USSR Inventor’s Certificate no. 869 982, 1981.
Ryzvanovich, A.Ya., Shmulevskii, D.B., and Generalov, V.A., Torsional drives for impact-interrupted cutting, Vestn. Mashinostr., 2018, no. 4, pp. 16–19.
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated by Bernard Gilbert
About this article

Cite this article
Ryzvanovich, A.Y., Generalov, V.A. Transmissions Producing Torsional Spindle Vibrations. Russ. Engin. Res. 39, 541–543 (2019). https://doi.org/10.3103/S1068798X19070207
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S1068798X19070207