
Abstract
The results of application of the ultrasonic (US) Doppler method for measuring the elasticity of skeletal muscles lying at a small depth (2–4 cm) from the skin surface are presented. The technique is based on calculating the speed of shear waves excited by a vibrator on the skin’s surface at frequencies of 150–250 Hz. The distribution of shear displacements in an elastic phantom, calculated by the finite element method, was compared with the results of measurements using a miniature accelerometer. The shear modulus of the elastic phantom, measured using the proposed technique, corresponds to values obtained from static measurements.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
INTRODUCTION
The development of an accessible method of measuring the shear elasticity of skeletal muscles is a highly relevant potential problem when applying acoustics to medicine [1, 2]. Doppler elastography is used to measure the elasticity of the liver and kidneys [3]. It requires the excitation of low-frequency shear waves in the soft tissue on their surfaces and subsequently recording the shear wave velocity using ultrasonic probing pulses. However, the strong attenuation of shear waves limits the accuracy of measuring the elasticity of deep-lying organs. Diagnostics of the elasticity of skeletal muscles located near the surface can be performed quite accurately via Doppler elastography, since the signal-to-noise ratio near the surface is higher than in deep-lying organs.
USING DOPPLER ULTRASONIC METHOD TO DETERMINE THE ELASTICITY OF SOFT TISSUES
If the shear elasticity of tissue is greater than the shear viscosity, phase velocity ct of the shear wave depends only on shear modulus μ and density ρ of the tissue [4]. After measuring the phase velocity of the shear wave, we can calculate the shear modulus of soft tissue using the equation
The phase velocity of the shear wave is measured with ultrasonic probing pulses emitted by a piezoelectric transducer. Reflecting from the scatterers in soft tissue, the ultrasonic probing pulses acquire a Doppler frequency shift that contains information about the phase of the scatterer’s oscillations. The procedure for processing probing pulses proposed by Sato [5] and later modified by Timanin [3] using modern electronic components allows us to obtain the phase distribution of low-frequency oscillations in soft tissue and determine phase velocity ct of the shear wave.
Let the ultrasonic probing pulses emitted with amplitude s0 and frequency ω0 propagate along the axis z, so that \(s(t) = {{s}_{0}}\sin {{{{\omega }}}_{0}}t.\) If the projection of the scatterer’s vibrational velocity \({{\upsilon }_{z}}\left( t \right)\) onto axis z along the probing pulse’s of propagation changes according to the law
where υ0, Ω, and Φ are the amplitude, frequency, and phase of the vibrational velocity of the scatterer, respectively, the reflected pulse acquires a Doppler frequency shift of
where c is the speed of sound in soft tissue. The reflected pulse received by the ultrasonic piezoelectric transducer has the form
where φ0 is a constant phase shift along the propagation path of the ultrasonic probing pulse, \(m = \frac{{2{{{{\omega }}}_{0}}{{\upsilon }_{0}}}}{{c\Omega }}.\) It follows from Eq. (4) that the phase of the reflected ultrasonic pulse is determined by the vibrational velocity of the scatterer. The amplitude and phase of the scatterer vibrational velocity can be calculated via quadrature processing [6] of the reflected pulse, where pulse \({{s}_{r}}(t)\) is multiplied with the direct and quadrature components of the probing pulse. Two quadrature Doppler signals sine Ys and cosine Yc are derived after filtering doubled frequency 2ω0, from which the time profile of the projection of the scatterer vibrational velocity is calculated using the equation
Using calculated profiles \({{\upsilon }_{z}}\left( t \right)\) for two scatterers when the distance between them does not exceed the shear wavelength at frequency Ω, we can determine the velocity of propagation for the quasi-plane shear wave in the region of the scatterers:
where Δr is the distance between the scatterers, α is the angle between the axis of propagation of ultrasonic pulses and the wave vector of the shear wave, and Δψ is the phase difference between the oscillations of the scatterers. The shear modulus of the medium is calculated from the measured phase velocity of the shear wave using Eq. (1).
The length of shear waves in soft tissues at the considered frequencies (150–250 Hz) varies within several centimeters. At the indicated frequencies, the near-surface region of muscle tissue lies in the near field of a low-frequency emitter with a complex spatial structure. The commonly used approach [7], based on calculations in a far-field approximation, can produce considerable errors in determining the shear elasticity of the tissue. To calculate the phase shift between the scatterers correctly, we must consider the structure of the vibrational velocity field near the low-frequency emitter.
CALCULATING AND MEASURING DISPLACEMENT IN THE NEAR FIELD OF A LOW-FREQUENCY EMITTER
Displacements created by a low-frequency emitter were measured in cylindrical gelatin phantom 1 [8] with a radius of 50 mm and a height of 60 mm (Fig. 1). Phantom shear modulus μ = 11.85 ± 0.18 kPa was measured via static ball indentation. Uniaxial miniature accelerometer 2 (Brüel & Kjær 4374) was embedded into the phantom. The mass of the accelerometer was 0.65 g. It was 5 mm in diameter and 6.3 mm tall. These dimensions are much smaller than the shear wavelength (23 mm at a frequency of 150 Hz), which allows local measurements of the field. The accelerometer was positioned on the axis of the cylindrical phantom at a distance of 20 mm from the bottom surface.

Schematic of the experimental setup for measuring the elastic phantom shear modulus with Doppler ultrasonic method: (1) gelatin phantom, (2) embedded accelerometer, (3) low-frequency emitter, (4) vibrator, (5) control accelerometer, (6) spherical scatterers, (7) ultrasonic piezo transducer, (8) signal generator, (9) oscilloscope, (10) computer, and (11) diode limiter.
A square bar with a side of 8 mm and a length of 50 mm, was used as low-frequency emitter 3, which vibrated along axis z under the action of vibrator 4 (Brüel & Kjær 4810) at a frequency of 150 Hz. The moving part of the vibrator, control uniaxial accelerometer 5 (Brüel & Kjær 8305), and the bar were rigidly connected to each other using threaded connections. The phantom was fixed in a movable holder at a height that allowed us to install a low-frequency emitter under it. Accelerometers 2 and 5 were connected to a two-channel oscilloscope through a charge amplifier and allowed us to measure the amplitude of the emitter’s oscillation on the surface of the phantom and the region of the medium where the accelerometer 2 was located. The amplitude of the vertical vibrations of the emitter was 0.5 μm. In initial position x0, the emitter was located under the accelerometer at a distance from it of 20 mm. During measurements, the emitter was displaced in horizontal direction x by a distance of 20 mm with a step of 2.5 mm.
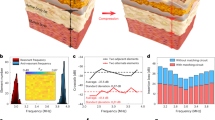
Numerical modeling was done for a two-dimensional case in a rectangle with sides of 100 × 60 mm (Fig. 2a) using finite elements in the COMSOL Multiphysics software package. The shear modulus in rectangular region μ = 12 kPa. Poisson’s ratio σ = 0.4999, and density ρ = 1000 kg/m3. The coefficient of dynamic viscosity was η = 2 Pa ⋅ s, which is typical of gelatin phantoms [9]. Boundaries AB and CD were rigid walls; BC, AF, and ED were free borders. On segment FE, there was a piston emitter of infinite length and a width of 8 mm, oscillating along the z axis with an amplitude of 0.5 μm at a frequency of 150 Hz. Rectangular contour PQRS measuring 5 × 6.3 mm depicts an accelerometer. As in the laboratory experiment, the lower side of the contour was located at a height of 20 mm from the AD boundary. To consider the final dimensions of the accelerometer, the displacement field was averaged over lower side PS of contour PQRS. In modeling, the emitter was displaced along the x axis by a distance of 20 mm with a step of 1 mm. In initial position x0, the centers of the emitter and the PQRS contour were on the same vertical line. In Fig. 2a, the color represents the instantaneous distribution of vertical displacement field uz, calculated for initial position x0 of the emitter. At a distance of around one and a half shear wavelengths (23 mm) from the emitter, a regular field structure with a 23 mm period of repetition observed. It was violated near boundaries AB, CD, and BC, due to the emergence of reflected waves and the formation of a standing wave with a frequency of one-half. The distribution of the amplitude of the vertical displacements of the accelerometer at a height of 20 mm, calculated using finite elements in dependence of on horizontal displacement x, is shown in Fig. 2b as a solid curve. The measured amplitude distribution is shown by dots connected by the dashed line for clarity. The distributions are normalized to their maximum values. Qualitative similarity is seen between the calculated and experimental distributions. Both distributions have a local minimum near x = 5 mm, a local maximum near x = 8 mm, and a similar increase in amplitude at x > 15 mm.

(a) FEM-calculated spatial distribution of the vertical displacement field uz at a frequency of excitation of 150 Hz. (b) The emitter on segment FE creates vertical displacements with an amplitude of 0.5 μm. Dependence of the amplitude of the vertical displacements of the accelerometer Uac on the horizontal coordinate x at a height of 20 mm from the emitter’s surface, calculated via FEM (solid line) and measured by the accelerometer (points connected by the dashed line). The amplitudes are normalized to their own maximum values.
USING DOPPLER ULTRASONIC METHOD TO MEASURE PHANTOM ELASTICITY
In this series of measurements, we used gelatin phantom 2 with shear modulus µ = 14.03 ± 0.24 kPa, into which two spherical plastic scatterers 6 1 mm in diameter were inserted (Fig. 1). The lower scatterer was located 15 mm from the base of the phantom, with the upper one 4 mm above it. Low-frequency emitter 3 was a hollow cylinder 20 mm high with an outer diameter of 20 mm and a wall thickness of 2 mm. This allowed us to obtain the maximum amplitude of vertical displacements on the cylinder axis. An ultrasonic piezoelectric transducer (UST) 7 was fixed on a movable holder above the upper base of the phantom. A 4-mm layer of water was used as a matching medium between the phantom and the UST. The UST had a diameter of 10 mm and a resonant frequency of 2.2 MHz. The UST’s center and scatterers were located on the axis of the cylindrical emitter. Signal generator 8 (RIGOL DG1062Z) with two independent channels was the source of the signal for exciting the UST and vibrator. The pulses reflected from the scatterers and received by the UST were fed to digital oscilloscope 9 (AKIP-4111/1) connected to computer 10 and synchronized with a signal generator. Diode amplitude limiter 11 was used to protect the oscilloscope input during the generation of a probe pulse.
The vibrator excited harmonic oscillations of a cylindrical emitter along the vertical axis at frequencies in the range of 130–160 Hz with a displacement amplitude of 0.5 µm. Oscillations of spherical scatterers that arose in the shear wave field were detected using the probe pulses with a frequency of 2.2 MHz and durations of 3.2 μs. The period of pulse repetition was 0.7 ms. These parameters of the probing pulses allowed measurements at a depth of 54 cm with a spatial resolution of 2.4 mm. The pulses received by the UST in 70-μs time windows were digitized at a sampling rate of 62.5 MHz and recorded in the computer’s memory. Five hundred such events were recorded in one measurement, which was limited by the oscilloscope’s memory. The period of recording was 0.35 s, which allowed us to record 45 to 56 periods of oscillations by the scatterers. Quadrature processing of reflected pulses was done with a program developed in the LabView environment. The algorithm of the program was tested using model signals. We modeled pulses reflected from scatterers vibrating under the action of a shear wave with a frequency of 100 Hz in a medium with a shear modulus of 10 kPa. The scatterers were positioned according to Fig. 1. We processed events with a total duration of 0.1 s, digitized at a frequency of 25 MHz. The shear modulus obtained from the model signals coincided with the preset value of 10 kPa at an error of no more than 0.1%.
In Fig. 3, symbols show the results of measuring the shear modulus of gelatin phantom 2 in the 130–160 Hz range of frequencies. The shear modulus of 14.03 kPa obtained from static measurements is shown by the solid line. The μ values measured at frequencies of 130, 135, 155, and 160 Hz correspond to a static modulus within a measuring error of no more than 5%. At three frequencies, however, the values of the shear modulus have considerable scatter. Such features are most likely associated with the structure of the near field and the presence of re-reflections of the shear wave in the region of the scatterers.

Results of measuring the shear modulus μ of gelatin phantom with Doppler ultrasonic method at frequencies Ω/2π of 130 to 160 Hz. The line shows the shear modulus obtained from static measurements.
To clarify the effect the near-field structure had on measurements, we modeled the experimental conditions using a simpler emitter in the form of a bar instead of a hollow cylinder. To minimize the effect of multiple reflections, modeling was done for a frequency of 250 Hz. The direction of the wave vector of a plane shear wave was obtained perpendicular to the wave front drawn from the center of the emitter. Figure 4 shows the dependence of the wave phase on distance l, measured along the segment coinciding in direction with the constructed wave vector. The angle of inclination of the segment to the vertical axis is α = 40°. The phase changes nonlinearly, especially near the boundary where there are re-reflected waves, and at the beginning of the segment, near the emitter, where there are leakage waves associated with the propagation of surface waves. The phase changes linearly in the range of distances l = 15–40 mm, measured along the wave vector, so calculations in this region can be performed using the plane wave approximation. We are therefore able to select the optimum measuring area using the geometry of the transmitter and the frequency of low-frequency vibrations.

FEM-calculations of the change in phase Ф of a shear wave at a frequency of 250 Hz along line l drawn at an angle of 40° to the vertical axis from the center of emitter FE.
CONCLUSIONS
We considered results of using Doppler ultrasonic method to measure the elasticity of skeletal muscles lying at small depths (2–4 cm) from the skin surface. An algorithm for calculating the shear modulus by measuring the phase shift of two scatterers moving in the shear wave field was developed and tested. The experimental tests were quite simple and done using standard measuring equipment. In contrast to measuring the elasticity of deep-lying organs, muscle elasticity can be measured in fractions of a second with aсquisition time less than 0.3 s, which is essential for diagnostic procedures. According to our estimates for diagnosing muscles located at a depth of 3 cm, the useful signal can be twice the noise level when oscillating the vibrator with an acceleration amplitude of about 0.5 m/s2, which is comparable to the amplitude of conventional vibrating massagers. The small depth of muscle sensing (3 cm) allows the use of vibrations with frequencies of 200–300 Hz, ensuring the spatial resolution of the proposed technique at levels of 1–2 mm. There are certain difficulties in obtaining a high degree of measuring accuracy, due to the complex structure of the near field of the vibrator and the difference between the phases of the shear wave in the region of the scatterers from the wave with a plane front. To consider the structure of the near field correctly, we proposed that its structure be calculated for specific vibrator geometries and the calculations of the phase velocity of shear waves be corrected. Work is now under way to test specific schemes of calculation for planned vibrators.
REFERENCES
Nordez, A. and Hug, F., J. Appl. Physiol., 2010, vol. 108, p. 1389.
Rudenko, O.V., Tsyuryupa, S.N., and Sarvazyan, A.P., Acoust. Phys., 2016, vol. 62, no. 5, p. 608.
Timanin, E.M., Eremin, E.V., Belyaev, R.V., and Mansfel’d, A.D., Acoust. Phys., 2015, vol. 61, no. 2, p. 249.
Oestreicher, H.L., J. Acoust. Soc. Am., 1951, vol. 23, p. 707.
Yamakoshi, Y., Sato, J., and Sato, T., IEEE Trans. Ultrason., Ferroelectr., Freq. Control, 1990, vol. 37, no. 2, p. 45.
Physical Principles of Medical Ultrasonics, Hill, C.R., Bamber, J.C., and ter Haar, G.R., Eds., New York: Wiley, 2004, 2nd ed.
Miller, G.F. and Pursey, H., Proc. R. Soc. London, 1954, vol. 223, p. 521.
Andreev, V.G., Demin, I.Yu., Korolkov, Z.A., and Shanin, A.V., Bull. Russ. Acad. Sci.: Phys., 2016, vol. 80, p. 1191.
Gennisson, J.-L. and Cloutier, G., IEEE Trans. Ultrason., Ferroelectr., Freq. Control, 2006, vol. 53, p. 716.
Funding
This work was supported by the Russian Science Foundation, project no. 19-72-00086; and by the Basis Foundation for the Development of Theoretical Physics.
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated by O. Zhukova
About this article

Cite this article
Asfandiyarov, S.A., Krit, T.B. & Andreev, V.G. Doppler Ultrasonic Technique for Measuring the Skeletal Muscle Elasticity. Bull. Russ. Acad. Sci. Phys. 85, 637–641 (2021). https://doi.org/10.3103/S1062873821060034
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S1062873821060034