
Abstract
The problem of active damping of cylindrical shell vibrations with free boundary conditions is considered. The shell is supported by rings. An example of the identification of the source and damping of bending vibrations of a shell is presented.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Cylindrical shells are part of the casing structures of many machine-building products and objects. Damping of cylindrical shell vibrations is needed in many areas of technology since vibrating shells are a source of acoustic fields. Study [1] has shown a conceptual option to dampen the secondary acoustic field scattered by a cylindrical shell using driving distributed forces applied to the shell. Work [2] explores the problem of forced vibrations of a composite shell with free boundary conditions at the ends submerged into a liquid. The shell consists of sections, each of which is a finite cylindrical shell with elastic rings at the ends. The shell structure is subject to discrete driving forces. A numerical and analytical method has been proposed to calculate forced vibrations of the shell structure. Examples of the comparative calculation of the frequency responses and waveforms of the shell structure in vacuum and liquid are presented.
Studies on similar problems—balancing of flexible rotors using proper waveforms—have been published. A theory and technique for the practical correction of the initial imbalance have been developed [3]. We failed to find publications devoted to active damping of cylindrical shell vibrations.
Passive damping using a rubber coating dampens vibrations; however, at medium and low, and especially low frequencies, it is not efficient.
We consider the problem of active damping of vibrations of a cylindrical shell with a constant radius supported by rings with free boundary conditions.
The goal of this study is to develop a theoretical (computational) basis for the method of damping cylindrical shell vibrations by discrete dynamic forces.
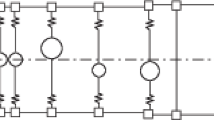
The rings can bear vibration-isolated masses that model equipment. The rings can be either real or auxiliary fictitious (inertialess) ones; however, despite this fact, normal (radial) discrete loads can be applied to them without using Dirac’s delta functions. The convenience of such a computational model is that the rings and, consequently, areas of application of discrete loads can be located in any required place along the shell length.
The radial forces that dampen radial (normal to surface) deformations are applied to the shell for each circular harmonic n and for each vibration frequency. The force referred to as discrete is such along the shell length while along the shell circle it is distributed according to the harmonic law Qkcosnφ.
DESCRIPTION OF THE PROBLEM
An elastic cylindrical shell is given that vibrates under the effect of the driving forces applied to it. The forces may be both distributed and localized, and their magnitudes and places of application along the shell length are a priori unknown. The magnitudes (amplitudes and phases) of vibrations or waveforms are assumed to be known and may be determined by calculations or in an experiment. It is required to dampen, i.e., diminish, the shell vibration amplitude.
For a dynamic model with distributed parameters excited by a distributed dynamic load, the function of vibrational displacements (displacements) along the longitudinal z axis can be represented using the Green function in the form [4]
where G(z, z0) is the Green function that sets a relation between displacements and the force p(z0), which is effective on the dz0 segment. The w(z) function is essentially the shell waveform.
In practice, to dampen the vibrations of large-size structures, it is necessary to use discrete forces Qk. Therefore, we assume that it is necessary to determine the discrete damping forces Qk that can be used to dampen the vibration amplitudes given a specified waveform of vibrations. The vibration waveform y(z) generated by the forces Qk can be represented as
where z is the coordinate of the location (section) in which displacement is determined; zk is the coordinate of the location (correction plane), to which the damping force is applied; and k is the sequential number of the damping force, k = 1, 2, 3, …, N. The Green function G(z, zk) is considered to be known.
The condition of absolute damping can be represented as w(z) – y(z) = 0. Since the absolute equality is very improbable, the method of least squares is usually applied.
In the method of least squares, the mismatch J between the displacements in the places of application of damping forces between the initial waveform w(z) and the waveform y(z) generated by the damping forces Qk
is minimized.
Since displacements are complex numbers, the absolute value of a complex number can be represented as \(\left| a \right| = \sqrt {a \cdot \bar {a}} \), i.e.,
where the notation wz = w(z) is introduced. The line atop the parameters indicates that they are complex conjugated.
The requirement that partial derivatives with respect to parameters Qk are zero
yields a system of equations of the best approximation for the determination of the forces Qk, in which, for easier representation of formulas, we denote G(z, zk) = Ak
After integration in each Eq. (1), we arrive at
where r = 1, 2, 3, …, N.
In Eq. (2) we denote
Equation (2) can be represented in the form
The same system of equations in symbolic form is
where Akr is a square matrix of Green functions (yields) with the size \(n \times n\), Qk is the vector of sought damping forces, and Cr is the vector of displacements that characterizes the known original waveform of vibrations. Equations (3) in a matrix form are
Actually, we arrived at a system of equations constructed by the influence coefficient method. For example, in the case of damping by discrete forces, the displacements and the damping forces in three sections are determined by the system of equations
or, in the matrix form,
where ekr are the influence coefficients and y1, y2, y3 are displacements at individual vibration points. The problem is mixed in the sense that vibrations are set as in a distributed dynamic model, while damping forces are determined as in a discrete model.
The discrete model is an approximate one, and its disadvantage is that displacements are only damped at the locations (sections) where damping forces are applied, while the calculation does not provide a vibration waveform between the sections.
Matrix equation (5) sets a relationship between forces and displacements for the known yield matrix ekr. If forces are known, displacements can be found, and, vice versa, if displacements are known, forces can be determined. If forces are specified and displacements are found, this so-called direct problem has a unique solution in a linear system. If forces are determined based on specified displacements, this is an inverse problem. In this case, the solution of the inverse problem is not unique, or more accurately is a multivariance (multifactor) one. If the number and locations of damping force application are selected in Eq. (5) in an arbitrary way, and the original vibration waveform can be excited by various versions of unknown driving forces, a factor of uncertainty (multivariance) of solutions emerges.
Each localized damping force in a distributed system excites a waveform that corresponds to this force. In the place of its application, it actually dampens vibrations but at all other locations it excites vibrations which, as a result of superposition, can lead to either a decrease or an increase in the vibration level. If the number of such forces is more than one, they not only dampen the original waveform but also affect each other’s waveforms. The problem of the optimal selection of the number of damping forces and the locations of their applications cannot be solved by using the influence coefficient method alone. The local (point) method of damping, i.e., damping of vibration at each point where it is measured separately from other points is not suitable. In the case of damping at a single point, it is necessary to control vibrations concurrently at other points according to the influence coefficient method.
The original waveform can be dampened in different ways: (1) using a distributed load, (2) using a set of localized forces that model the distributed load, and (3) by a single localized force. The most efficient damping method is apparently application of a damping load, which is equal in magnitude and opposite in phase to the original driving load. This approach fully resolves the problem but implementation of this method requires knowledge of the initial parameters (character, magnitude, phase, and location) of the initial driving load.
This approach may also provide more than one version of damping that yield close results or the version in which improvement in one of the parameters results in deterioration in another parameter. Should this be the case, the specific version is selected by a decision maker based on additional methods and criteria and using the optimization method.
A similar problem of the selection of the best solution emerges in solving similar problems, for example in dynamic balancing of flexible rotors [3] or application of the method of equivalent sources that simulate radiation of a complex-shaped body [5, 6]. Therefore, system of equations (5) alone is not sufficient for successful damping of vibrations.
To determine the influence coefficients and assess the influence of the magnitude and location of damping forces on the result of damping, as a minimum, it is necessary to a have a method for calculation of forced shell vibrations and the corresponding software that makes it possible to perform detailed studies rapidly. To calculate the forces of the vibrations of a shell excited by discrete forces, we use the method proposed in [2].
To outline the method [2], we present its initial and final formulas. For a smooth finite cylindrical shell with free boundary conditions, the equations of vibrations of a compartment shell are [7]
The solution of the equations of vibrations can be represented as [9]
where n are circular harmonics of the Fourier series, n = 0, 1, 2, 3, …; αjn are the roots of the dispersion equation; j = 1–8 are sequential numbers of the roots; Сjn are sought coefficients; Δjn are the minors of the matrix of equations of shell motion; ω = 2πf is the angular frequency of vibrations, and f is the frequency of vibrations.
The equations of the vibrations of a system that consists of shells (compartments) and rings have the form [2]
In system of equations (6), the first equation refers to the first ring located on the left end of the shell; the second equation is for any intermediate ring; and the third equation refers to the last ring on the right end of the shell. The driving or damping discrete forces applied to the rings are P0, Pq, Pр.
It is reasonable to perform time-consuming and complex computational research that can yield useful practical results for only specific objects.
We consider here only a simple example that characterizes the mechanism of damping.
The requirement that should be fulfilled and the fulfillment of which fully solves the damping problem is to identify the source of vibrations. We present below an example of how it can be identified.
Figure 1 schematically shows a composite cylindrical shell with five rings to which driving P1 and damping Qk forces can be applied. Figure 2 shows the initial frequency response of bending vibrations of this cylindrical shell for the n = 1 harmonic under the effect of the driving force P1 applied at the left end of the shell. The primary objects of damping are usually resonance vibrations. We select for damping the waveform at the first resonance frequency f = 4 Hz. The free waveform of vibrations (real component; the imaginary component is close to zero) at this frequency is shown in Fig. 3 (curve 1). We take this waveform as the initial one. It should be noted that it was calculated by us, but the shape of vibrations can be measured experimentally. For this waveform we look for a source: a driving force, its location, and magnitude.

Cylindrical shell structure.

Frequency response of shell vibrations: 1, initial; 2, after damping.

Shell vibration waveforms: 1, initial waveform; 2, due to force Q3; 3, after damping.
For this waveform (Fig. 3, curve 1) with the maximum in the shell center, an apparent solution is the version with application of the damping force Q3 to the shell center. Having applied the damping force Q3, the magnitude of which is chosen based on the maximum of the initial waveform, we obtain the frequency response shown in Fig. 2 (dots) and the waveform presented by curve 3 in Fig. 3.
Under the effect of the damping force Q3, the shape of vibrations is symmetric with respect to the shell center; however, the waveforms generated by the forces Р1 and Q3 do not coincide when superimposed, so the resulting waveform is not symmetric with respect to the shell center. These details cannot be revealed using Eqs. (5) alone, and without calculating forced vibrations, they would remain unknown to us.
We now consider the results that can be provided by an alternative albeit not this apparent version of damping by the force Q5 applied to the right end of the shell. By means of calculations, we determine the magnitude of the force that reproduces the original waveform (Fig. 4, curve 1) and change its sign to the opposite Q5 = –Р1.

Waveforms: 1, initial waveform due to Р1; 2, due to the force Q5; 3, after damping under the effect of two forces Р1 and Q5.
Figure 5 displays the frequency response of cylindrical shell vibrations under the action of the initial force Р1 (solid line) and under the combined action of the initial force Р1 and the damping force Q5, i.e., after damping.

Frequency response of shell vibrations: 1, before damping; 2, after damping.
In the case that the damping force Q5 is defined accurately (as it is in our case), it yields the vibration waveform the same as the waveform due to the initial force Р1 for the same signs and coinciding initial points. It is natural to assume that in total they should yield zero, i.e., fully compensate for each other. Actually this is not the case. After damping, zero only occurs at a single point. This is explained by the fact that if the force is applied at the shell end, the waveform is not symmetric with respect to the shell center. As a result, the waveforms due to each of the two forces are shifted with respect to each, and there is only one crossing point where zero is obtained.
If the force Q5 is applied to the right end of the shell, the decrease in the frequency response at a frequency of 4 Hz is approximately 32 dB; however, the resonance peak at the second resonance at the frequency f = 9.25 Hz increases by approximately 6 dB. If the damping force Q3 is applied at the shell center, the effect at the first resonance is somewhat smaller: the frequency response at a frequency of f = 4 Hz diminishes by approximately 22 dB, while the level at the second resonance f = 9.25 Hz remains the same. In each of two vibration damping options only one force was used for damping but it was applied to different locations (sections) of the shell.
The next identification step consists in applying the damping force Q1 = Q5 = –P1 at the left end of the shell. The result obtained in this case is clear without illustrations, i.e., vibrations zero at a frequency of 4 Hz and, moreover, if the frequency dependence of the source is known and the frequency of the damping force is the same, the entire frequency response and all the resonances associated with it are zero. In this case, the source of vibrations is identified and dampened.
To make a decision in complex cases where several incompatible factors should be taken into account, optimization methods are needed.
The technology of practical damping of vibrations is an independent research and engineering problem. Regarding practical implementation of vibration damping, the following should be noted. Damping forces can be generated by vibrators. Active damping using conventional mechanical vibration dampers that isolate the casing (foundation) from the equipment is in this case not suitable, since employment of this technique assumes involvement of a vibrational support in the form of equipment on which the vibrations are enhanced while on the casing or the foundations they decrease (mutually compensate).
Currently, methods of unsupported vibration damping are under development that use Smart Panel, the so-called multilayered intelligent coating. Unsupported vibrators have been designed on the basis of piezoelectric elements [7, 8].
Surface vibrations are synthesized by electric charges generated by piezoelectric elements. They synthesize the specified space–time distribution of normal vibrational velocities on any surface in the absence of any mechanical support. Such techniques were developed abroad for a long time. For example, study [9] reports the results of the examination of the effect provided by a single layer of Smart Panel for vibration damping. The panel surface was subject to vibrations by means of wideband excitation. The accelerometer signal was sent to a controller that activated 1–3 the composite actuator to reduce vibrations on the basis of input electric signals. The efficiency of the reduction in the vibration level was about 20 dB in the frequency range of 1–4 kHz.
CONCLUSIONS
The problem of active damping of vibration of a cylindrical shell with free boundary conditions using discrete damping forces has been considered. It is shown that the system of equations derived using the influence coefficient method is not sufficient for the effective solution of the vibration damping problem.
As a theoretical (computational) basis for the solution of the problem of damping of cylindrical-shape vibrations, four methods need to be developed and used: (1) the influence coefficient method, (2) the method for calculation of forced shell vibrations; (3) method for identification of the original driving forces (magnitudes and application locations) based on the specified (initial) shell waveform, and (4) the optimization method that takes into account the experience and knowledge of the decision maker. All of these methods are based on the calculation of forced vibrations of the cylindrical shell. The primary technique that determines the physical mechanism of damping should be considered the method of identification of perturbing forces which is also required to be developed.
Vibration damping based on the first free bending vibration waveform was used as an example to present the options available for the damping and their efficiency. It has been shown that in the case considered the first waveform of free shell vibrations and even the entire frequency response can be fully dampened by a single discrete force.
REFERENCES
Kosarev, O.I., Active quenching of the remote secondary field of a cylindrical shell by applying inducing forces, J. Mach. Manuf. Reliab., 2013, vol. 42, no. 1, pp. 7–13. https://doi.org/10.3103/S1052618812050068
Kosarev, O.I., Puzakina, A.K., and Nakhatakyan, D.F., Forced vibrations of a cylindrical shell immersed in liquid, J. Mach. Manuf. Reliab., 2020, vol. 49, no. 2, pp. 98–104. https://doi.org/10.3103/S1052618820020090
Korneev, N.V., Multicriteria optimization of misbalance of flexible rotary systems, Izv. Samar. Nauchn. Tsentra Ross. Akad. Nauk, 2008, vol. 10, no. 4, pp. 830–833.
Shenderov, E.L., Volnovye zadachi gidroakustiki (Wave Problems of Hydroacoustics), Leningrad: Sudostroenie, 1972.
Aleksidze, M.A., Reshenie granichnykh zadach metodom razlozheniya po neortogonal’nym funktsiyam (Solution of Boundary Value Problems by Expansion into Nonorthogonal Functions), Moscow: Nauka, 1978.
Zaridze, R.S. and Talakvadze, T.M., Chislennoe issledovanie rezonansnykh svoistv metallodielektricheskoi reshetki (Numerical Study of Resonance Properties of Metall–Dielectric Grid), Tbilisi: Izd. Tbilisskogo Gos. Univ., 1983.
Arabadzhi, V.V., Active control of the field of normal oscillatory velocities of a shell submerged in fluid, Sbornik trudov XV sessii RAO (Proc. 15th Session of Russian Academy of Education), Nizhny Novgorod, 2004, p. 196.
Gardonio, P., Lee, Y.-S., Elliott, S.J., and Debost, S., Analysis and measurement of a matched volume velocity sensor and uniform force actuator, J. Acoust. Soc. Am., 2001, vol. 110, no. 6, p. 3025. https://doi.org/10.1121/1.1412448
Smart structures, Am. German Soc. Bull., 1998, vol. 77, no. 6, p. 31.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
The authors declare that they have no conflicts of interests.
Additional information
Translated by M. Shmatikov
About this article

Cite this article
Kosarev, O.I., Puzakina, A.K. Problem of the Active Damping of Cylindrical Shell Vibrations by Discrete Forces. J. Mach. Manuf. Reliab. 51, 725–732 (2022). https://doi.org/10.3103/S1052618822080131
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S1052618822080131