
Abstract
This work deals with implementation of adaptive nonlinear model-based control (NMBC) scheme on the time varying system. In this approach, only influential model parameter was estimated using well recognized parameter estimation techniques and predicted value of the parameters were used to synthesize the control law. Detailed guidelines on tuning controller parameters were discussed in this paper. In order to demonstrate the practical utility and usefulness of the NMBC control framework, a typical nonlinear industrial process was chosen. The realistic simulations like servo-regulatory compliance, elimination of measurement noise with a state-of-the-art simulator ensures the efficacy of the proposed controller. The performance assessment of the NMBC schemes (computational speed, mean square error (MSE)) were analyzed and compared with the traditional adaptive PI (TA-PI) control strategy. Furthermore, the convergence assessing chart (mean square deviation (MSD)) for different estimators were compared in order to analyze the merits and demerits associated with them. From the extensive simulation studies, robustness features of the aforementioned control schemes have been investigated.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 INTRODUCTION
Linear control schemes are frequently used in wide range of real time applications over long period due to its simplicity and computationally less complex in nature [1]. The analogy between the linear and non-linear controller is that, the first one lead to potential deficiency while handling with nonlinear processes and as a consequence the desire performance may not be achievable [2]. Since, large number of controllers can be classified on the basis of ‘computation based on measurement’ (like PID controller) [3, 4], ‘computation based on model’ (like IMC controller) [5, 7] or both (like MPC controller) [8, 9]. From macroscopic perspective, the later philosophy was improvised successfully whenever there is a demand of designing combination of both nonlinear feedback scheme and the state observer [6]. NIMC, NMPC or NMBC types of control framework took much attention and redraws wide-spread acceptance throughout the process control discipline [3, 10].
A detailed analysis and categorization relating with model-based control strategies fairly deals with the way of deployment and taking into account the efficiency associated with it. A wide range of underlying models like linear operator inversion theory based [7], recurrent neural network (RNN) [12] structure based, artificial neural network (ANN) [13] logic based, fuzzy rule [14] based, combination of least square and support vector machine (LS-SVM) based [15], support vector regression (SVR) based [11], auto-regressive moving average (ARMA) [15] based models and so many other varieties of nonlinear rigorous model structures were employed to meet the control objective.
Most commonly, NMBC control framework can be classified into direct and indirect category [22]. From computational complexity point of view, direct scheme promises better results compared to indirect one [23]. Moreover, direct NMBC structure, which does not involve any identification step, conceives less resource consumption for any process unit. An investigation on first principle model based direct type of NMBC control architecture employing on several standard process units ensures encouraging results [22]. As a matter of fact, huge efforts necessarily are exploited for the applications of more sophisticated as well as prediction logic based nonlinear control implementation [7].
An optimization-based solution technique would necessarily be devoted to enhance controller performance and is therefore highly desirable. Designing prediction-based control algorithm relies under optimal trade-offs between objective derived on the basis of performances indices and the computational complexity [22]. Since, ‘controller-observer’ type of combined logic fairly deals with intrinsic robust features in a straightforward manner [11]. To construct a stable estimator for the continuous-time dynamical system, Kalman filter (KF) would be well suited even in the presence of process-model mismatch scenario [23].
Motivated by the increasing need to develop state-of-art ‘direct way of NMBC’ and ‘prediction logic-based’ control implementation for both SISO/MIMO types of processes, a newly developed control strategies were illustrated, taking into account effectiveness, easily deployable, reliability and robustness. Due to difficulties of obtaining measured values of the process parameter(s) from the real plants in several scenarios, an online estimation technique would necessary be exploited to synthesize the estimated parameter(s) value [4, 8]. The proposed attempt leads to a control framework, where predicted values of the effective model parameters (using nonlinear KF approaches) were taking into consideration and the values of the model state(s) and the controller gain were derived implicitly by predicted values of the process parameter(s). Finally, the predicted and the corrected part of the manipulated variable have been determined.
Despite of the continual use of TA-PI control scheme in the process control area, a comparative study has been made between proposed method and the TA-PI control law [16]. The foremost influential and logical way of updating TA-PI controller parameters was done by using nonlinear KF techniques [24]. The salient features and advantages of the proposed scheme can be summarized as follow:
• In contrast to the NIMC, NMPC or other types of NMBC strategies, the proposed control schemes incorporate a suitably reduplicated model in order to generate estimated values of the model parameter(s) value.
• The effects of imposing constraints explicitly into the account of state/input variable(s) in order to synthesis the estimation algorithm.
• An approximating solution relating with prediction-based control problem, which involves minimization of the ‘performance based objective function’ measure by optimizing the controller tuning parameter.
• The developed control schemes are generally employed for a wide range of applications and are made automatic for online tuning.
• The NMBC control laws offer to handle structure/unstructured types of process uncertainty even in the presence of measurement noise.
Novelty of the manuscript:
The salient features and original contributions of this work are summarized as follows:
• Firstly, a qualitative evaluation of the process dynamics was carried out. This potential application may stir a new idea from theoretical and experimental point of view. Using EKF/EnKF/UKF, the filtering technique efficiently suppresses the impact of the dynamics model error.
• An approach of yielding tractable approximation to the NMBC problem by incorporating EKF/EnKF/UKF estimation schemes was well poised. All the numerical simulations were conducted under the condition of structured/unstructured plant-model mismatch and noisy process measurement.
• A numerical optimization causes widespread adoption of the NMBC and hence outperforms by reducing computational complexity. The NMBC algorithm was combined with inferential/noninterferential measuring scheme to formulate an inexpensive, easy handling controller considering product quality. A comparative study on performance (mean square deviation (MSD)) of the proposed state(s)/parameter(s) estimation strategies was well explored.
Demonstration and practical utilities of the aforementioned control strategies implemented on a typical nonlinear benchmark process was illustrated. Furthermore, detailed guidelines for tuning NMBC controller parameters were analyzed. However, a performance based comparative studies like servo-regulatory compliance, elimination of measurement noise, robustness phenomenon and computational speed of the said control schemes have been offered in this work. Finally, the merits and demerits associated with the NMBC framework over TA-PI control law and their usability in the process control discipline is discussed.
Organization of this paper:
The organization of the paper is as follows: Section 1 provides the comprehensive literature survey and highlights the primary objective, motivation, and main contribution of this work. Section 2 deals with the mathematical preliminaries and assumptions made in order to obtain feasible solution. Section 3 emphasizes a main contribution of this work as well as elaborates a traditional control strategy. Demonstration and practical utility of the said control schemes on an industrial application relating with some realistic results like servo-regulatory operation, attenuation of observation noise, robustness analysis and various performance based comparative study have been offered in Section 4. Section 5 draws conclusion of the proposed work.
2 MATHEMATICAL PRELIMINARIES AND ASSUMPTIONS
System description:
The present work illustrates formulation of problem for both deterministic and stochastic processes. Firstly, a typical finite duration, continuous-time based deterministic type MIMO process has been considered. The input(s), states, and outputs of a dynamical system, can be denoted as \(u \in \mathbb{U} \subseteq {{\mathbb{R}}^{m}}\), \(x \in \mathbb{X} \subseteq {{\mathbb{R}}^{n}}\), \(y \in \mathbb{Y} \subseteq {{\mathbb{R}}^{p}},\) respectively. The process model is expressed equivalently as
Here, \(d\) is the added nonlinear component or external low-frequency external perturbation(s) \((d \in {{\mathbb{R}}^{{{{n}_{d}}}}})\) and can be introduced through perturbation of influential process parameter (\(\theta \)). So far, we have discussed about the deterministic process, where it was assumed that no error is there in its measurement model. However, most of the real time processes exhibits process noise as well as measurement noise. Hence, goodness of the proposed controller can be identified by checking its ability in presence of both process and observational noise. For a stochastic model, Eqs. (1) and (2) can be written as:
\(w(w \in {{\mathbb{R}}^{{{{n}_{w}}}}})\) and \({v}({v} \in {{\mathbb{R}}^{{{{n}_{{v}}}}}})\) denotes the process and observation noise respectively.
3 PROBLEM FORMULATION
Given a stable state nonlinear system exhibiting stochastic behavior, the process dynamics can be generalized by (1)–(3). Hence, the control objective deals with designing a model-based tracking scheme such that the plant output can satisfactorily track the desired trajectory in the presence of actuator saturation. In order to assess performances of the above-mentioned controllers and the estimator, MSE and MSD chart have been reported respectively, and \(n\) is the simulation length.
3.1 Designing NMBC Scheme Using Parameter Estimation Techniques
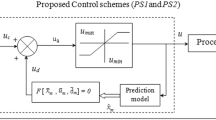
This strategy is particularly exploited for a class of stable, SISO type nonlinear processes taking into account process and measurement noise. Firstly, the model parameter (through which disturbance was introduced) was estimated on-line using well recognized parameter estimation schemes like EKF/EnKF/UKF. The predicted value of process parameter(s) was used to formulate control law. \({{\Theta }_{{{{k}_{c}}}}}\) (controller gain) and \({{\Theta }_{{{{b}_{m}}}}}\) (predicted computation) are the proposed controller parameters. \({{\Theta }_{{{{k}_{c}}}}}\) and \({{\Theta }_{{{{b}_{m}}}}}\) are denoted as \({{k}_{c}}\) and \({{b}_{m}}\) respectively in the graphical representations. The schematic diagram of the control scheme is shown in Fig. 1. The control law can be formulated as

Schematic diagram of parameter estimation based NMBC scheme.
Control logic:
Step 1: Identify effective model parameter. Obtain the optimal value of the estimated model parameter \(({{\hat {b}}_{0}})\) with the help of available measurements by employing different estimation techniques (see Appendix A–C). The control strategy is summarized in 2 substeps sequentially as mentioned by:
Prediction Stage: In this phase, evaluation of one-step ahead predicted parameter \(({{\hat {\Theta }}^{f}}\,\,\operatorname{or} \,\,{{\hat {b}}_{0}})\) as well as one-step ahead predicted model output \((\hat {h})\) were determined using different parameter estimation schemes (EKF/UKF/EnKF).
Correction Stage: Correction phase involves computation of the Kalman gain \(({{K}_{\Theta }})\) and the estimation error \((e).\) Finally, the estimated model parameter \(({{\hat {\Theta }}^{a}})\) values and updated error covariance matrix \((P_{\Theta }^{a})\) have been obtained. Steps 2–7 occur sequentially after obtaining \(({{\hat {b}}_{0}}\,\,\text{and}\,\,\hat {h})\).
Step 2: Compute the value of model state \((\hat {h})\) with the help of estimated model parameter \(({{\hat {b}}_{0}})\) as
Step 3: Derive the value of ‘component based on predicted model’ \(({{\Theta }_{{{{b}_{m}}}}})\) as mentioned by
Step 4: As the predicted model output matrix \({{C}_{m}}\) appeared as 1 in spherical tank process, hence the controller gain \(({{\Theta }_{{{{k}_{c}}}}})\) can be determined as
Step 5: \(({{\Theta }_{\omega }})\) is considered as another tuning parameter and an optimization scheme is used to obtain optimal value \(({{\Theta }_{\omega }})\). A performance based on numerical optimization \((J)\) technique has been synthesized. It should be noted that, minimum value of \((J)\) would be achieved by optimal tuning of \(({{\Theta }_{\omega }})\).
Here, \({{w}_{e}}\) is the output error weighting constant.
Step 6: Determine the value of ‘component based on measurement’ \(({{\Theta }_{{{{b}_{c}}}}})\) as given by
\({{e}_{p}}\) is the process error and can be obtained by
Step 7: Evaluate the controller output by combining both ‘component based on predicted model’ and ‘component based on measurement’. A constraint was imposed on \(q\) in order to satisfy assumption (4).
Remark 1. Instead of using EKF/EnKF/UKF, a traditional linear Kalman filter (KF) can be used to achieve transient performance and equilibrium point tracking on a class of stable deterministic type of linear processes. Note that, this type of control strategy has not been offered in this work.
Algorithm1: NMBC scheme
Inputs initialization: \({{{\boldsymbol{\mathbf{\theta }}}}_{0}},{{{\mathbf{P}}}_{0}},{\mathbf{Q}},{\mathbf{R}}\)
Loop: For (\(i = 1,...,n\))
Step 1: Using different transformation techniques, compute predicted values of \(({{\hat {\Theta }}^{f}}\operatorname{or} {\text{ }}{{\hat {b}}_{0}})\)
and covariances \({\mathbf{P}}(i|i - 1)\). Compute Kalman gain. In correction stage, obtain estimated
value of model parameter \(({{\hat {\Theta }}^{a}})\) and updated error covariance matrix \((P_{\Theta }^{a})\)
Step 2: determine \(\hat {h}\) with the help of \({{\hat {b}}_{0}}\)
Step 3: Derive predicted part of controller output \(({{\Theta }_{{{{b}_{m}}}}})\) using \(({{\hat {b}}_{0}};\hat {h})\)
Step 4: Compute controller gain \(({{\Theta }_{{{{k}_{c}}}}})\) with the help of \(({{\Theta }_{{{{b}_{m}}}}};\hat {h})\)
Step 5: Using optimization technique find out value of \(({{\Theta }_{\omega }})\)
Step 6: Compute corrective part of input \(({{\Theta }_{{{{b}_{c}}}}})\) with the help of \(({{\Theta }_{{{{k}_{c}}}}};{{\Theta }_{\omega }})\)
Step 7: Combine predicted and corrected part of input to obtain total manipulated variable.
end for
Output: \(q\)
3.2 Designing TA-PI Control Scheme
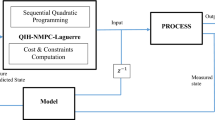
A standard phase lag compensator type control law (e.g., TA-PI) is developed, in which EKF/EnKF/UKF based parameter estimation techniques were used to recursively tune the PI controller parameters \(({{\Theta }_{{{{k}_{p}}}}};{{\Theta }_{{{{\tau }_{p}}}}})\). Block diagram of the control logic as shown in the Fig. 2.

Schematic diagram of TA-PI control scheme.
This two-term control law is expressed as [24, 26]:
\(({{\Theta }_{{{{k}_{p}}}}})\) signifies proportional gain and \(({{\Theta }_{{{{\tau }_{p}}}}})\) represents integral time constant. Despite continual use of TA-PI control scheme over wide range of applications, a comparative study was made with the proposed NMBC schemes. Below sections provide the potential application of the control strategies employing on the benchmark nonlinear process.
4 EXAMPLE: CASE STUDY ON SPHERICAL TANK LEVEL SYSTEM
We accomplish the applications of the control law mentioned in (3.1–3.2) in order to demonstrate effectiveness and to highlight its superiority. MATLAB-19 was used to carry out numerical simulations. The plant dynamics was derived from the first principle model and is mentioned as
where, R is the maximum radii and h is the liquid level of the spherical tank. The schematic diagram of the spherical tank system is depicted in Fig. 3. Equation (14) would be applicable under the assumption \(\left( {0 \leqslant h \leqslant R} \right){\text{.}}\) \(q\) denotes the inflow rate. Outflow rate (\({{q}_{{{\text{out}}}}}\)) directly depends on the liquid height in line following Bernoulli’s theorem and can be expressed as

Schematic diagram of spherical tank system.
\(b{\kern 1pt} '\) (downstream valve co-efficient) is considered as the process parameter; g is the gravitational force and is a constant term. Let us assume that
Sampling time was chosen as \(0.0167\) min. Two stable operating equilibrium of interests \((\bar {h} = 25,\,\,\bar {q} = 2.5)\) and \((\bar {h} = 30,\,\,\bar {q} = 2.7386)\) were considered from [16]. The nominal process parameter values were given in Table 1. A symmetric constraint \((0 \leqslant q \leqslant 10\,\,{{\operatorname{cc} } \mathord{\left/ {\vphantom {{\operatorname{cc} } \operatorname{s} }} \right. \kern-0em} \operatorname{s} })\) was imposed on the manipulated variable in order to avoid actuator saturation problem. The output constraint is also symmetric and is considered as \((0 \leqslant h \leqslant 50\,\,\operatorname{cm} )\). True state is obtained by solving first order ordinary differential equation using Jacobi linearizes approximation method with above operating regions. Table 2 provides values associated with Kalman filter-based parameter estimation techniques.
4.1 Servo Response in Presence of Measurement Noise
In order to assess servo performance of the said control strategies in presence of measurement noise, arbitrarily chosen predetermined set point (\({{h}_{{{\text{sp}}}}}\)) values of the below pattern were introduced. Note that a nominal operating region \((\bar {h} = 30,\,\,\bar {q} = 2.7386)\) was considered to illustrate the servo operation. Figures 4a–4c presents the servo response, where a comparison study of the NMBC scheme with TA-PI control law was taken into consideration.

Servo and regulatory response of the spherical tank system in presence of measurement noise (NSR = 0.1): servo response—((a, b) process output-h, (c) controller output-q); regulatory response—((d) introduction of q0, (e) process output-h, (f) controller output-q).
From Figs. 4a and 4b, it can be inferred that all the control strategies are able to maintain the set point at desired level. The variation of the control input demands was reported in Fig. 4c. It was also investigated that, TA-PI controller is aggressive in nature and taking longer time to settle at the time of set point variation compared to NMBC strategy. In order to achieve desired height quickly at the time of set point variation, controller tuning parameter needs to be optimized \(\left( {{{{\left. {{{\Theta }_{\omega }}} \right|}}_{{{{{({{J}_{{\omega ,\Theta }}})}}_{{\min }}}}}} = {\text{23}}{\text{.64}}} \right).\)
4.2 Regulatory Response in Presence of Measurement Noise
In order to demonstrate the regulatory compliance of the control strategies with correlated noises between the system and the observation, a slow time varying additional flow, consisting of flow rate (q0 \({{\operatorname{cc} } \mathord{\left/ {\vphantom {{\operatorname{cc} } s}} \right. \kern-0em} s}\)) of the following pattern has been considered (see Fig. 4d). Set point
was maintained at 25 cm and a stable operating point of \((\bar {h} = 25,\,\,{{\bar {f}}_{{{\text{in}}}}} = 2.5)\) was recognized. Figures 4d–4f provides a regulatory operation based comparative study between NMBC and TA-PI control scheme. From Fig. 4e, it can be concluded that all the controllers are able to eliminate disturbances even in presence of measurement noise and able to bring back process variable at the desired value. The corresponding change in controller outputs has been reported in Fig. 4f. From the observation, it can be inferred that TA-PI scheme is oscillatory in nature and takes longer time to settle compared to the proposed scheme.
4.3 Performance Assessment of Different Controllers
In order to assess qualitative performances with different level of control actions like servo-regulatory compliance, elimination of measurement noise, detailed performance-based charts like computation time (CT, Table 4), MSE (for servo response, see Table 5)) were provided. Table 3 shows that UKF logic-based TA-PI control strategies out performs over other approaches. On the other hand, a performance comparative study (MSD: Table 6) for different estimators was presented. From the observations, it can be inferred that UKF-NMBC scheme is having better performance (MSE, MSD and \(({{\tau }_{c}})\)) over other control systems, whereas EnKF-NMBC logic has better MSD and \(({{\tau }_{c}})\) values compared to EKF-NMBC scheme. As lesser MSD value (between true and estimated value of the process parameter) resulted faster convergence, hence it can be embodied that UKF-NMBC scheme provides faster set point tracking as well as eliminating disturbances capabilities compared to the other methods. TA-PI control scheme is having least performances (MSE and \(({{\tau }_{c}})\)) among the others. It was also noticed that, there is deterioration in performances for all the control schemes in the presence of measurement noise. Toward the end, it can be concluded that, there is slight difference in performances between EKF-NMBC, EKF-NMBC and UKF-NMBC approaches.
Remark 2: True value \((b)\) and estimated value \((\hat {b})\) of the downstream valve coefficient appear almost same in servo operation, but differs significantly at the time of disturbance elimination. Hence, MSD chart has been prepared for regulatory level only.
4.4 Guidelines of Tuning \(({{\Theta }_{\omega }})\)
\({{\Theta }_{\omega }}\) is considered as one of the effective tuning parameters of the 1st type of NMBC scheme. Since, optimization of \({{\Theta }_{\omega }}\) can be determined by minimizing the performance (MSE) based objective measured (step 5: Subsection 3.1). From the graphical representation, it has been observed that, with increase in \({{\Theta }_{\omega }}\) gradually, system takes less time to reach desired set point and finally the minimum value of cost function would be obtained by choosing optimum value of \({{\Theta }_{\omega }}(23.64).\) Further increasing \({{\Theta }_{\omega }}\) gradually, J increases slightly and results the system to become oscillatory in nature at critical point.
4.5 Identifying Robustness of Different Control Schemes
Most commonly, robustness criterion leads to an extent up to which the closed loop desired response would be achievable subject to the condition that there is deviation of the process parameter(s) from its nominal value [2]. In order to assess robust performances for the aforementioned control schemes, a set of variations (given below, also shown in Fig. 5a) in process parameter \((b)\) was introduced.

Identifying robustness: without presence of measurement noise: ((a) evolution of b0 and (b) process output-h), with presence of measurement noise (NSR = 0.15) ((c) process output-h, (d) controller output-q, variation of (e) kc and (f) bm, (g) evolution of b0).
From the extensive simulation study, it can be inferred that the controllers are able to facilitate desired tracking performance (Figs. 5b and 5c) despite of process-model mismatch even in the presence of co-related plant and measurement noise. Figure 5d indicates the variation of the manipulated variables whereas Figs. 5e and 5f outlines the change in the controller parameters \(({{\Theta }_{{{{k}_{c}}}}};{{\Theta }_{{{{b}_{m}}}}})\) respectively. The evolution of the true \(({{b}_{0}})\) and estimated value \(({{\hat {b}}_{0}})\) of the valve coefficient (both in presence and without presence of observational noise) were reported in Figs. 5a and 5g respectively. From the overall performance, it can be concluded that the proposed NMBC scheme exhibit acceptable robust behavior.
4.6 Underlying Reasons of the Proposed Method for Working Better Compared to the Traditional Approach
Since, large no. of controllers can be classified on the basis of ‘computation based on measurement’ (like PID controller), ‘computation based on model’ (like internal model controller) or both (like model-predictive/model-based controller). From macroscopic perspective, the later philosophy was improvised successfully whenever there is a demand of designing combination of both nonlinear feedback scheme and the state/parameter observer. From the literatures, it was investigated that the direct way of controller synthetization is less computational hazardous compared to the traditional approach. An indirect way of synthetization requires system model inversion technique and it results the system to yield critically damped phenomenon whereas direct way of designing technique is quite easy to structure. The plethora of designing direct synthesis method firstly transcribe a desired closed loop framework for the given plant model and then the control law would be determined. With controller synthesis, one needs to translate the desired performance indices (like time taking to get settle, or to eliminate disturbances etc.) into a closed loop process model. The performance translation into a known dynamical system is straightforward for low order system whereas, for high-order systems, it is not trivial due to their dynamical nature. Above said demerits are associated with the indirect way of synthetization technique.
Hence, this work possesses a model-based single loop control structure implemented on both deterministic/stochastic systems. The control law does not involve plant model inversion and the control framework makes use of the dynamic part of the system model directly without reduction, factorization into invertible and noninvertible parts. The methodology of the proposed control strategy resembles a PI like control structure for both low/high order processes. We made a comparison study of the developed scheme with the traditional PI control rule. To have a fair comparison between proposed and the TA-PI control scheme, TA-PI control parameters were updated using some well recognized estimation logics (EKF/EnKF/UKF).
5 CONCLUSIONS
An efficient NMBC control scheme was designed and successfully implemented for a class of nonlinear systems. A detailed guideline guarantees the acceptability of the proposed control schemes over wide range of applications. The NMBC control strategy was validated under realistic views like impact on load disturbances, process-model mismatch, stochastic uncertainties and imposing input-state constraints. From the performance (MSE, CE, settling time, time required to eliminate disturbance) comparative study, it can be inferred that NMBC scheme offers better results over TA-PI control scheme. Moreover, it was investigated that UKF-NMBC scheme provides lesser values of MSD, resulting the estimator to converge with the actual process variable(s) faster than the other methodologies, whereas EKF-NMBC rule preserves least performance. From the extensive simulation studies, it can also be concluded that TA-PI control law exhibits poor robustness compared to the other schemes. In contrast with different performance measuring schemes, the NMBC controllers facilitate easy handling and ensuring reliable operations.
REFERENCES
Boyd, S. and Barratt, B.C., Linear Controller Design: Limits of Performance, Englewood Cliffs, N.J.: Prentice Hall, 1991.
Bequette, B.W., Practical approaches to nonlinear control, Nonlinear Model Based Process Control, Berber, R. and Kravaris, C., Eds., NATO ASI Series, vol. 353, Dordrecht: Springer, 1998, pp. 3–32. https://doi.org/10.1007/978-94-011-5094-1_1
Syrmos, V.L., Abdallah, C.T., Dorato, P., and Grigoriadis, K., Static output feedback—A survey, Automatica, 1997, vol. 33, no. 2, pp. 125–137. https://doi.org/10.1016/S0005-1098(96)00141-0
Liu, Y.-J., Li, D.-J., and Tong, S., Adaptive output feedback control for a class of nonlinear systems with full-state constraints, Int. J. Control, 2014, vol. 87, no. 2, pp. 281–290. https://doi.org/10.1080/00207179.2013.828854
Wang, R., Koelewijn, P.J.W., Manchester, I.R., and Tóth, R., Nonlinear parameter-varying state-feedback design for a gyroscope using virtual control contraction metrics, Int. J. Robust Nonlinear Control, 2021, vol. 31, no. 17, pp. 8147–8164. https://doi.org/10.1002/rnc.5559
Findeisen, L., Imsland, F., Allgower, F., and Foss, B.A., State and output feedback nonlinear model predictive control: An overview, Eur. J. Control, 2003, vol. 9, nos. 2–3, pp. 190–206. https://doi.org/10.3166/ejc.9.190-206
Economou, C.G., An operator theory approach to nonlinear controller design, PhD Dissertation, Pasadena, Calif.: California Inst. of Technology, 1985.
Morari, M. and Lee, J.H., Model predictive past, present and future, Comput. Chem. Eng., 1999, nos. 4–5, pp. 667–682. https://doi.org/10.1016/S0098-1354(98)00301-9
Garcia, C., Prett, D., and Morari, M., Model predictive control: theory and practice—A survey, Automatica, 1989, vol. 25, no. 3, pp. 335–348. https://doi.org/10.1016/0005-1098(89)90002-2
Qin, S.J. and Badgwell, T., A survey of industrial model predictive control technology, Control Eng. Pract., 2003, vol. 11, no. 7, pp. 733–764. https://doi.org/10.1016/S0967-0661(02)00186-7
Wang, P., Yang, C., Tian, X., and Huang, D., Adaptive nonlinear model predictive control using an on-line support vector regression updating strategy, Chin. J. Chem. Eng., 2014, vol. 22, no. 7, pp. 774–781. https://doi.org/10.1016/j.cjche.2014.05.004
Han, H.-G., Zhang, L., Hou, Y., and Qiao, J.-F., Nonlinear model predictive control based on a self-organizing recurrent neural network, IEEE Trans. Neural Networks Learn. Syst., 2016, vol. 27, no. 2, pp. 402–415. https://doi.org/10.1109/TNNLS.2015.2465174
Afram, F.J., Janabi-Sharifi, F., Fung, A.S., and Raahemifar, K., Artificial neural network (ANN) based model predictive control (MPC) and optimization of HVAC systems: A state of the art review and case study of a residential HVAC system, Energy Build., 2017, vol. 141, no. 9, pp. 96–113. https://doi.org/10.1016/j.enbuild.2017.02.012
Cheng, L., Liu, W., Hou, Z.-G., Huang, T., Yu, J., and Tan, M., An adaptive Takagi–Sugeno fuzzy model-based predictive controller for piezoelectric actuators, IEEE Trans. Ind. Electron., 2017, vol. 64, no. 4, pp. 3048–3058. https://doi.org/10.1109/TIE.2016.2644603
Kim, T.Y., Kim, B.S., Park, T.C., and Yeo, Y.K., Development of predictive model based control scheme for a molten carbonate fuel cell (MCFC) process, Int. J. Control, Autom. Syst., 2018, vol. 16, pp. 791–803. https://doi.org/10.1007/s12555-016-0234-0
Tan, K.K., Huang, S., and Ferdous, R., Robust self-tuning PID controller for nonlinear systems, IECON’01. 27th Ann. Conf. of the IEEE Industrial Electronics Society, Denver, 2001, IEEE, 2001, vol. 1, pp. 758–763. https://doi.org/10.1109/IECON.2001.976710
Evensen, G., The ensemble Kalman filter: Theoretical formulation and practical implementation, Ocean Dyn., 2003, vol. 53, pp. 343–367. https://doi.org/10.1007/s10236-003-0036-9
Kalman Filtering and Neural Networks, Haykin, S., Ed., New York: John Wiley & Sons, 2001.
Reichle, R.H., Walker, J.P., Koster, R.D., and Houser, P.R., Extended versus ensemble Kalman filtering for land data assimilation, J. Hydrometeorol., 2002, vol. 3, no. 6, pp. 728–740. https://doi.org/10.1175/1525-7541(2002)003<0728:EVEKFF>2.0.CO;2
Julier, S.J. and Uhlmann, J.K., Unscented filtering and nonlinear estimation, Proc. IEEE, 2004, vol. 92, no. 3, pp. 401–422. https://doi.org/10.1109/JPROC.2003.823141
Van der Merwe, R., Wan, E., and Julier, S., Sigma-point Kalman filters for nonlinear estimation and sensor-fusion: Applications to integrated navigation, AIAA Guidance, Navigation, and Control Conf. and Exhibition, Providence, R.I., 2004. https://doi.org/10.2514/6.2004-5120
Refsnes, J.E.G., Nonlinear model-based control of slender body AUVs, PhD Dissertation, Trondheim: Norvegian Univ. of Science and Technology, 2007.
Subbotina, N.N. and Tokmantsev, T.B., Optimal synthesis to inverse problems of dynamics, IFAC Proc. Vol., 2014, vol. 47, no. 3, pp. 5866–5871. https://doi.org/10.3182/20140824-6-ZA-1003.01174
Wakitani, S., Nakanishi, H., Ashida, Y., and Yamamoto T., IFAC-PapersOnLine, 2018, vol. 51, no. 4, pp. 422–425. https://doi.org/10.1016/j.ifacol.2018.06.131
Arasu, S.K., Panda, A., and Prakash, J., Experimental validation of a nonlinear model based control scheme on the variable area tank process, IFAC-PapersOnLine, 2016, vol. 49, no. 1, pp. 30–34. https://doi.org/10.1016/j.ifacol.2016.03.024
Bhadra, S., Panda, A., Bhowmick, P., Goswami, S., and Panda, R.C., Design and application of nonlinear model-based tracking control schemes employing DEKF estimation, Optim. Control Appl. Methods, 2019, vol. 40, no. 5, pp. 938–960. https://doi.org/10.1002/oca.2526
ACKNOWLEDGMENTS
The authors would like to thank to the editor and reviewers for suggesting important corrections and modifications that have enriched the quality and contribution of this paper.
Funding
The authors do not have any financial support from any end.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
The authors declare that they have no conflicts of interest.
APPENDIX
APPENDIX
1.1 APPENDIX A. CONTINUOUS-TIME PARAMETER FILTER USING EKF ESTIMATION SCHEME
Initialization of the filter [18, 19]:
Time update equations:
Computation of Kalman gain:
\({{{\mathbf{J}}}_{\Theta }}\) is the Jacobian of the observation matrix and can be expressed as
Hence, the measurement update equations are as follows:
1.2 APPENDIX B. CONTINUOUS-TIME PARAMETER FILTER USING USING UKF ESTIMATION LAW
Let us skip the filter initialization and time update equations (mentioned in Appendix A). A set of \((2L + 1)\) sigma points with the associated weights \(w(i)\) are chosen symmetrically about \({{{\mathbf{\hat {\Theta }}}}^{f}}(t)\) as follows [20, 21, 25]:
The measurement prediction \(({\mathbf{\hat {p}v}}(t))\), computation of innovation \(({\mathbf{e}}(t))\), covariance matrix of innovation \(({{{\mathbf{P}}}_{{ee}}}(t))\), the cross-covariance matrix between the predicted process/controller parameter(s) estimation error and innovation \(({{{\mathbf{P}}}_{{\theta e}}}(t))\) are computed as follows:
where \({{w}_{0}} = {\kappa \mathord{\left/ {\vphantom {\kappa {(L + \kappa )}}} \right. \kern-0em} {(L + \kappa )}}\) and \({{w}_{i}} = \kappa {\text{/}}(2(L + \kappa ))\). The Kalman gain is computed as
Hence, the measurement update equations are as follows:
1.3 APPENDIX C. CONTINUOUS-TIME EnKF FILTER DERIVED FROM EKF ESTIMATION SCHEME
Let’s assume, \({{{\mathbf{\bar {\Theta }}}}^{f}}\) and \({{{\mathbf{\bar {\Theta }}}}^{a}}\) represent forecast and posterior ensemble mean of the estimated parameter(s) \({{{\mathbf{\hat {\Theta }}}}^{f}}\) and \({{{\mathbf{\hat {\Theta }}}}^{a}}\) respectively whereas \({{{\mathbf{P}}}^{f}}\) and \({{{\mathbf{P}}}^{a}}\) corresponds to the covariance’s of the forecast and analysis respectively. Skipping the filter initialization (see Appendix A), time update equations can be written as [17, 19]:
About this article

Cite this article
Banerjee, S., Panda, A., Pandey, I. et al. Parameter Estimation and Its Application on Designing Adaptive Nonlinear Model Based Control Schemes for the Time Varying System. Aut. Control Comp. Sci. 56, 324–336 (2022). https://doi.org/10.3103/S0146411622040022
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S0146411622040022