
Abstract
The paper presents an adaptive method for inverse determination of the tensile \(\sigma -w\) relationship, direct tensile strength and Young’s modulus of cementitious materials. The method facilitates an inverse analysis with a multi-linear \(\sigma -w\) function. Usually, simple bi- or tri-linear functions are applied when modeling the fracture mechanisms in cementitious materials, but the vast development of pseudo-strain hardening, fiber reinforced cementitious materials require inverse methods, capable of treating multi-linear \(\sigma -w\) functions. The proposed method is fully general in the sense that it relies on least square fitting between test data obtained from various kinds of test setup, three-point bending or wedge splitting test, and simulated data obtained by either FEA or analytical models. In the current paper adaptive inverse analysis is conducted on test data obtained from three-point bending of notched specimens and simulated data from a nonlinear hinge model. The paper shows that the results obtained by means of the proposed method is independent on the initial shape of the \(\sigma -w\) function and the initial guess of the tensile strength. The method provides very accurate fits, and the increased number of variables describing the \(\sigma -w\) relationship constitutes the basis for obtaining detailed information of crack propagation in any cementitious material.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
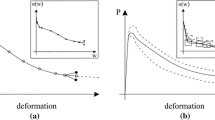
In the field of concrete fracture mechanics, the cohesive crack model is recognized for its ability to model the entire fracture process. The model originates from the work by Barenblatt [1] and Dugdale [2], who dealt with crack faces which can transfer traction stresses until a limiting tensile stress state. This corresponds well with the fracture mechanism in heterogeneous materials, such as plain and fiber reinforced concrete, which are governed by sliding between aggregates or the fiber bridging effects respectively, see Fig. 1. The cohesive model is also the basis for the Fictitious Crack Model (FCM), a nonlinear crack model originated by Hillerborg et al. [3], which assumes that the energy dissipation at the crack tip is insignificant compared to the energy dissipation in the fracture process zone. The model states that when the stress at a given point of a structure reaches the limited direct tensile strength, a cohesive crack will open, as illustrated in Fig. 1.

Left Stress state and crack propagation in plain cementitious materials, Right Stress state and crack propagation in fiber reinforced cementitious materials
A point on the cohesive crack path is capable of transfering stresses until a critical crack width opening has been reached, cf. Fig. 1. More specifically the FCM assumes that a real crack with traction free surfaces will develop when such limiting crack opening is exceeded, while the stress state in the crack process zone is governed by the fictitious crack opening w. Thus, the FCM assumes that the crack propagation is governed by the constitutive relation, \(\sigma -w\). This fracture mechanical model has since the pioneering work of Hillerborg et al. [3] been the basis for investigating the crack propagation in quasi-brittle cementitious materials with and without discrete fiber reinforcement. In the fictitious crack model the tensile strength, the modulus of elasticity, the fracture energy and the \(\sigma -w\) is the governing parameters. For plain concrete it is often sufficient to determine the fracture energy and the tensile strength and approximate these properties to a simple bi-linear \(\sigma -w\) relationship. The fictitious crack model also applies well to fiber reinforced concretes, where the fiber addition mainly affect the post cracking behavior. The post cracking behavior is furthermore influenced by the amount of fibers, shape of the fibers and the bond between fiber and concrete matrix, the latter is directly related to the concrete quality. The effect of fiber bridging makes it crucial to determine the \(\sigma -w\) relationship, rather than estimating the total fracture energy. Much effort has been directed towards developing reliable test methods to reveal the \(\sigma -w\) relationship for different concrete compositions. Most directly is the uni-axial tensile testing method in which the measurements explicitly returns the full constitutive model of the crack. In the work of Petersson [4], Gopalaratnam et al. [5] and Cornelissen et al. [6] it is shown that the direct tensile test method is sensitive to several parameters, e.g. stiffness of testing equipment, the shape of the specimen, multi-cracking, etc. Therefore, researchers have developed several inverse approaches, which are mainly based on force-deformation data from e.g. the wedge splitting test and the three-point bending test of notched beams. The present paper applies three-point bending tests of notched concrete beams to exemplify the capabilities of the adaptive inverse analysis method. Here it is important to emphasize that the adaptive inverse analysis method can also be implemented in conjunction with the Wedge splitting test. When performing a three-point bending test of a notched concrete beam, a stable discrete crack (Mode I) is assumed to develop, and the resulting \(P-w_{\text {cmod}}\) curve provides the foundation for the inverse analysis. The scope of the current work is, therefore, to present an efficient and robust method to identify the multi-line constitutive relationship, \(\sigma -w\), of a given cementitious material.
2 Previous methods of inverse analysis
Generally, the computation of the inverse analysis relies on curve-fitting between reliable test data and a numerical or analytical model simulating the mechanical behavior of the given problem. The task is to minimize the discrepancy between the test data and the simulated data, which can be formulated as an optimization problem, using the parameters governing the crack propagation model to minimize the discrepancy, see e.g. Roelfstra et al. [7]. Previously the three-point bending test has been simulated either by FEA, see e.g. Kitsutaka [8, 9], and Uchida et al. [10, 11], or analytical closed form solutions to crack propagation in concrete beams, see e.g. the work of Østergaard [12], Østergaard et al. [13] and Sousa et al. [14]. In the FEA simulations poly-linear \(\sigma -w\) softening curves can be treated, while the closed form solutions only consider simple linear or bi-linear softening curves. The closed form formulations of the problem have proven to be very efficient and less time-consuming compared to conducting inverse analysis by means of FEA, but as the complexity of the softening curves increases, the inverse solution is difficult to obtain in closed form according to Slowik et al. [15], Skocek et al. [16].
2.1 Simulation of \(P-w_{\text {cmod}}\) data
In this paper the analytical nonlinear hinge model is applied to simulate the \(P-w_{\text {cmod}}\) data for a notched concrete beam. The analytical model is chosen here because of its simplicity and efficiency, but it is important to emphasize that the adaptive inverse analysis can be conducted in combination with FEA simulations as well. The nonlinear hinge model was first presented in Ulfkjær et al. [17, 18], and later as basis for the work by Pedersen [19], Olesen et al. [20, 21], Olesen [22]. The cracked hinge model developed in Olesen [22] gives an analytical solution to the N, M and \(\varphi\) relation of the hinge for a given multi-line \(\sigma -w\) curve. In the present paper, the method is implemented numerically, thus a multi-linear softening curve can be used, although the numerical implementation obviously will be more time-consuming compared to the analytical procedure developed in Olesen [22] for a bi-linear softening relation. This is compensated by the fact that the numerical implementation enables introduction of multi-line softening curves. In short terms, the analytical nonlinear cracked hinge model developed in Olesen [22] assumes that the deformation of the concrete beam is governed by the development of the fictitious crack in a layer of independent springs, see Fig. 2. This spring layer is assumed to have a width of s = h/2, which corresponds to the recommendation in Ulfkjær et al. [17], determined by FE simulations. The hinge is defined by rigid boundaries; outside these, the bulk material is linear elastic. The analytical model provides a closed form solution to the entire \(M-\varphi\) curve, which makes it possible to determine the stress state for all stages of crack propagation.

Nonlinear hinge model for crack propagation in concrete beams
The constitutive relation of the hinge in the un-cracked and the cracked stages is provided in Eqs. 1–2, where E is Young’s modulus and \(\epsilon\) is the elastic axial strain, \(\sigma _{\rm w}(w)\) is the stress versus crack opening relationship, where w(y) is a given crack opening at y, and \(\sigma _{t}\) is the uni-axial tensile strength. In Eq. 2 the stress-crack opening curve is normalized to the direct tensile strength \(\sigma _{t}\), cf. Fig. 3. For further insight into the cracked hinge model, the following work are recommended to consult: Olesen et al. [20, 21] , and Østergaard et al. [12].

Parameters of the multi-linear \(\sigma -w\) relations
2.2 Least square fit
The aim of the least square curve fit is the establishment of the stress versus crack width opening relationship (\(\sigma -w\)) for concrete in uni-axial tension, by fitting a mechanical model to a set of test data. The general approach for the inverse analysis is first to obtain test data from the laboratory and, secondly, to simulate the mechanical behavior of e.g. the three-point bending test, either by FEA, analytical or semi-analytical models. The fitting procedure is seen as an optimization problem that minimizes the squared residuals between the simulated and the test data. The general form of the least square fit is stated in Eq. 4.
where \(W_i\) is the weighting, \(P_{\text {num}}\) is the simulated data, and \(P_{\text {test}}\) is the test data of point i. In the fitting process, robustness is a major issue, hence the idea of a weighting function as utilized in Sousa et al. [14], where preferential treatment is given to some regions of data. This is not seen as a robust solution method and, consequently, the weighting function has not been adopted in the development of the new adaptive inverse analysis method. Previous work has applied two main fitting procedures for solving the inverse problem, cf. Skocek [16]. The first procedure minimizes the discrepancy between the simulated data and the test incrementally, where each increment optimizes a point on the \(\sigma -w\) curve, as sketched in Fig. 4a.The inverse analysis approach developed in Kitsutaka [9] is a fully general method for establishing the \(\sigma -w\) relationship for one test specimen. According to Slowik et al. [15] and Skocek [16], the method is sensitive to minor measurement errors, which will accumulate during the analysis, because each new analysis point depends on the outcome of the previous step. The second approach covers methods where the shape of the \(\sigma -w\) relationship is known a priori, and the procedure relies on the governing parameters from the shape of the curve, e.g. bi-linear or exponential functions. The inverse analysis is seen here as a global optimization of either all governing parameters [14] or as sub-optimization, where a sequential determination of each parameter is conducted, cf. Østergaard et al. [13]. Skocek [16] shows that the sequential curve-fitting procedure from Østergaard [12] is difficult to apply when the number of lines describing the softening curve is increased. The inverse analysis produre by Skocek [16] was limited to 5 line segments describing the softening curve, due to inconsistent solutions for softening curves consisting of more than 5 line segments. This limitation is dealt with in the new adaptive method, where a multiple number of line segments can be introduced in the \(\sigma -w\) function.

a Stepwise inverse analysis, b Global inverse analysis
3 The principles of adaptive inverse analysis
In this paper, the global fitting method constitutes the basis for developing the adaptive method, applying the philosophies from both Østergaard et al. [13] and Sousa et al. [14]. In the previously developed methods for inverse analysis, it has been difficult to increase the number of variables governing the \(\sigma -w\) model without achieving a local minimum and consequently a spurious solution. The general proposal in this paper is an inverse analysis relying on the global fitting procedure where the governing variables successively are introduced to the fitting process, while keeping the search region for optimum fit sufficiently small. This has been succeeded by restricting the search region of each variable. The approach is fully general and makes it possible to automate the curve-fitting procedure, where a priori knowledge of the \(\sigma -w\) function is irrelevant. The succeeding sections will document the proposed method and provide a general method for determining the tensile strength, Young’s modulus and the multi-line \(\sigma -w\) relation in one process.
3.1 Governing fitting variables
In previous work, such as Østergaard et al. [12], Sousa et al. [14] and Skocek et al. [16], the basis for the inverse analysis has been indirect parameters, in form of the slope of the line segments and the line segments intersection with the ordinate axis, see Fig. 3. Accordingly, a redefinition of the governing variables of the softening curve is conducted, thus the basic parameters \(\sigma _{i}\) and crack width opening \(w_{i}\) are utilized and yield a direct formulation of the governing variables for the inverse problem. The softening curve is thus identified by the basic parameters as illustrated in Fig. 5. The input parameters to the nonlinear crack hinge model is derived on the basis of the normalized \(\sigma _{i}\) and \(w_{i}\). By means of the basic parameters, see Fig. 5, the governing parameters of the cracked hinge model can be derived by Eq. 5.

Basic parameters of the multi-linear \(\sigma -w\) relationship
3.2 Determination of Young’s modulus
Young’s modulus is determined initially because of its significant influence on the determination of the true axial tensile strength. Different methods can be applied, but in the present paper, a simple linearization of the elastic part of the \(P-W_{\text {cmod}}\) curve is employed. The user has to manually set a elastic limit, seen as the initial straight branch of the \(P-W_{\text {cmod}}\). It is important to emphasize that the elastic properties have to be identified before continuing the search for the fracture mechanical parameters. This ensure a robust search for optimal fits.
3.3 Controlling the search for optimal fit
The adaptivity of the method is computed by initially fitting a simple bi-linear model to the given data, and successively increasing the number of line segments describing the \(\sigma -w\) model. During the entire process the governing variables, \(f_{t}\), \(w_{i}\) and \(\sigma _{i}\), have restricted search regions, securing a robust search for optimum fit. The search region is computed by:
where the \(\delta\) parameter designates the distance to the nearest boundary condition, which identifies the feasible search region for the given parameter, see Fig. 6. The calculation of the delta parameters can be realized by establishing the initial search region of a bi-linear model. Realizing that when \(N=\) 2, the only free variables are \(f_{t}\), \(w_{2}\) \(w_{3}\) and \(\sigma _{2}\), because \(w_{1} = \sigma _{2} = 0\), and \(\sigma _{1} = 1\). Thus the initial boundaries can be computed as:
Subsequently the task is to find the best fit, corresponding to the current or active boundaries. When the best fit for the active boundaries has been reached, the optimized variables, \(f_{t}\), \(w_{i}\) and \(\sigma _{i}\), are assigned to new updated boundaries, and the previous boundaries are deactivated. This principle is sketched in Fig. 6, which illustrates the updated boundaries for each optimized variable and the next step in the optimization process. The updated search region, cf. Fig. 6, is efficiently controlled by the \(\delta\) and \(\eta\) parameters, where \(\eta\) is controlling the final size of the search region. In the current work, \(\eta\) has been set to 1/3, which secures a sufficient reduction of the search region. This process is kept running until the best fit has been identified for the given model and active search region. Initially the bi-linear model is fitted until the boundaries do not significantly change, here computed as the maximum change in any variable \(f_{t}\), \(w_{i}\) and \(\sigma _{i}\). If none of the variables have changed more than 1 % since the previous boundary adjustment, a new line segment is introduced to the \(\sigma -w\). This generally means that if the maximum change in all optimization variables is below the given tolerance between two boundary adjustments, the current model has been fitted and an optimal solution has been reached for the current model. The next step is the actual adaptive part of the inverse analysis. The idea is that an extra point is introduced to the \(\sigma -w\) function, when an active model has been fitted. The optimization process is then continued with a model containing an extra set of variables, \(\sigma _{i}\), \(w_{i}\). The new point on the \(\sigma -w\) curve is located on an existing line segment which has the greatest distance between two neighboring points. This part of the process is sketched in Fig. 7, illustrating the procedure from a bi-linear to a tri-linear model. The idea is to add a new point on the \(\sigma -w\) curve in locations with maximum distance between existing variables.

a Search region for each basic parameter of the \(\sigma -w\) relation, b Updated search regions for the variables in the \(\sigma -w\) curve

Procedure for adaptive adjustment of the \(\sigma -w\) curve, adding an extra point to the line segment with maximum length
The new variables \(\sigma _{i}\) and \(w_{i}\) are added in a line segment with the maximum distance between the end points, seen as:
The new point is located in line segment i found in Eq. 8. The location of the new point is computed by:
When the new set of variables is established, the next step will be rerunning the fitting process with a \(\sigma -w\) model, now formulated by \(N + 1\) line segments, while still controlling the boundaries of the feasible search region for each variable. The general scheme of the procedure can be computed as sketched in Fig. 8.

Procedure for computing the adaptive inverse analysis
The process is stopped by evaluating a refinement criterion, which is controlled by the parameter \(N_{\text {stop}}\), controlling the number of line segments describing the final \(\sigma -w\) model.
3.4 Data setup
The least square fitting method requires that consistency exists between the increment in \(w_{\text {cmod}}\) for the simulated data and the test data. Therefore, a convenient interpolation method is adopted. In the paper the arbitrarily obtained numerical values of \(P_{\text {num}}\) are interpolated such that the numerically simulated force, \(P_{\text {num}}\) is related to the \(w_{\text {cmod}}\) obtained in the test. The following interpolation is used, cf. Fig. 9:

Interpolation of P, for numerical simulations
where \(w_{{\text {cmod}}N}\) is the numerically simulated crack mouth opening, \(w_{{\text {cmod}}T}\) is the crack mouth opening obtained by the test, \(P_{N}\) is the simulated force and \(P_{\text {int}}\) is the interpolated force. Using the interpolated values of P, creates the basis for consistent variables. Furthermore, the data obtained in the lab test has to be evenly spaced, such that no parts of the \(P-w_{\text {cmod}}\) curve are weighted by a denser representation of data points.
4 Results
In this section, the performance of the adaptive inverse analysis method will be benchmarked to known results from inverse analysis of fiber reinforced concrete beams subjected to three-point bending. In Löfgren et al. [23], the inverse analysis was carried out by means of the nonlinear hinge model and a bi-linear \(\sigma -w\) relationship, based on the method developed in Østergaard [12] and a hinge width of s = h/2 was used. The basis for the inverse analysis was the \(P-w_{\text {cmod}}\) test measurements of notched beam specimens. The results obtained by the inverse analysis in Löfgren et al. [23] were compared to an inverse analysis conducted in the FEM tool Diana, where the fracture parameters were adjusted manually until a sufficient fit was obtained. In the following, the main features of the adaptive inverse analysis will be described by means of the benchmarking. The adaptive inverse analysis in this benchmark is implemented by means of the nonlinear hinge model, described in Sect. 2.1. Issues such as overall fitting accuracy, fitting range and starting guess will be treated, hereby showing that the adaptive inverse analysis gives highly accurate fits independent of fitting range and starting guess.
4.1 Three-point bending tests
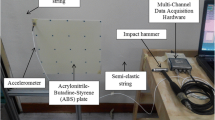
The data investigated in this paper is based on the test carried out in Löfgren et al. [23]. Herein, the three-point bending is conducted in accordance with RILEM TC 162-TDF [25], see Fig. 10.

Test setup in Löfgren et al. [23], according to RILEM TC 162-TDF [mm]
The crack mouth opening \(w_{\text {cmod}}\) is monitored by a clip gauge at a distance of 8 mm from the bottom of the beam. The test is conducted by a displacement control of \(w_{\text {cmod}}\). The test setup was applied to test two different fiber reinforced concrete mixes. These can be seen in Table 1. For the purpose of this paper, only mixtures 1, 2 and 4 and 5 will be treated.

\(P-w_{\text {cmod}}\) test results of mixtures 1, 2, 4 and 5, after Löfgren et al. [23]
For each mix, 5 specimens were prepared, and the mean of the \(P-w_{\text {cmod}}\) was calculated for each concrete mixture, see Fig. 11. Figure 11 indicates, that two rather different concrete types are of concern. Mixtures 4 and 5 are more dense concretes, with an increased cement content and addition of fly ash to the mixture. These compact concretes have an increased tensile strength and improved fiber pullout behavior, which significantly improves the fracture properties of the material.
4.2 Inverse analysis
Figure 12 shows the results of the inverse analysis. The fitting range was reduced to \(w_{\text {cmod}} = [0;2\,{\text {mm}}]\) which is in accordance with the approach in Löfgren et al. [23]. The results show that the adaptive inverse analysis provides very accurate fits, compared to the bi-linear fit obtained in Löfgren et al. [23]. The adaptive inverse analysis applies a linear model containing N = 5 line segments for the initiation of the adaptive inverse analysis. The analysis was stopped when the number of line segments in the \(\sigma -w\) relation exceeded N = 20. Figures 13 and 14 show the corresponding \(\sigma -w\) relations. The results are benchmarked with the results obtained in Löfgren et al. [23], for a bi-linear \(\sigma -w\) relationship.

Inversely determined \(P-w_{\text {cmod}}\) curves

Inversely determined \(\sigma -w\) for mixtures 1 and 2

Inversely determined \(\sigma -w\) for mixtures 4 and 5
The results clearly show good agreement between the different methods. The adaptive inverse analysis method, for all cases, results in the same direct tensile strength, \(\sigma _{t}\), as the analytical inverse analysis based on a bi-linear model. Furthermore, the adaptive inverse analysis shows the capability of modeling the fracture behavior of first crack initiation where it previously has been difficult to distinguish between the direct tensile strength and the behavior of the fiber activation when the crack initiates. This phenomenon is greatly influenced by the fiber bridging action and here the formulation of the adaptive inverse methods, capable of conducting the multi-line inverse analysis, copes with this problem. In the current formulation the adaptive inverse analysis method is implemented by the nonlinear hinge model, but the inverse method is fully general and can be applied in combination with FEA simulations as well. In the case of strain softening, fiber reinforced concrete the motivation for using the adaptive inverse analysis, is the methods ability to give high resolution information of the fiber bridging effect and thus a more precise measure of the ductility. It is seen in Fig. 13 that for design purposes it will be sufficient to use a less complex bi-linear model, but for materials with pronounced bridging effect, as seen in Fig. 14, the bi-linear model will not describe the fracture mechanical behavior accurately. Thus it has to be emphasized that the major motivation for developing the adaptive method has been the inverse analysis of pseudo-strain hardening, fiber reinforced materials, where it is essential that the inverse analysis copes with multi-linear \(\sigma -w\).
5 Computational issues
The development of the adaptive inverse analysis relies on simple rules of the search region for each variable. The general idea is that the search region of each variable is not allowed to influence other variables in the search for optimum. The following, will show that the starting guess of the governing parameters does not influence the outcome of the analysis.
5.1 Initial guess of \(\sigma _{t}\)
The knowledge of the ultimate direct tensile strength of concrete is of great concern.

Influence of starting guess, tensile strength
In the case of fiber reinforced concrete it is difficult to distinguish between the actual tensile strength of the matrix and the activation of the fiber bridging effect. Sousa et al. [14] and Löfgren et al. [24] emphasized that the initial guess of \(f_t\) should be determined by independent tests or based on previous knowledge. Thus, one of the desirable features of the adaptive method is that the results of the inverse analysis are independent on the initial guess of \(\sigma _{t}\). Figure 15 illustrates this phenomenon. The inverse analysis is conducted on mixture 1, and the initial linear model contains N = 5 line segments, and the final model contains N = 10 lines. Varying the starting guess of the direct tensile strength from 1 to 15 MPa does not influence the final results of the inverse determined direct tensile strength, \(f_t\).
5.2 Initial guess of \(\sigma -w\) model
The adaptive inverse analysis is initiated without any pre-assumptions for the final shape of the \(\sigma -w\) relationship.

The influence of varying the initial number of line segments of the initial linear model
To initiate the analysis, a simple linear model is assumed, cf. Fig. 16, but it is possible to give the linear model a number of divisions, such that the linear model contains N line segments with identical slope. Figure 16 shows the influence of introducing more variables to the initial model. The results in Fig. 16 are obtained by inverse analysis of mixture 1, with data in the range \(w_{\text {cmod,max}} = 2\,{\text{ mm }}\). Both initial models give approximately the same resulting \(\sigma -w\) curve. Although some disturbances are obtained at the end of the curve, this will be seen as insignificant for the overall interpretation of the fracture mechanical behavior. The initial number of variables seems to influence the sensitivity of local data effects, hence keeping the number of initial variables at a minimum will reduce this sensitivity, which relates to initial guess of \(w_c\). Thus, for an initial model containing more than two line segments, this variable seems to be a stationary variable, especially if the initial guess of this parameter is \(w_c = w_{\text {cmod,max}}\).
5.3 Influence of fitting range
The fitting range controls the amount of data treated in the inverse analysis. To exemplify this, mixtures 1 and 5 were chosen. Figure 17 illustrates the results of varying the fitting range, \(w_{\text {cmod,max}}\), from 0.5 to 4 mm. The influence of the fitting range is most clearly seen in Fig. 17 (left), where the \(\sigma -w\) curve obtained by the fitting range of \([0;0.5\,{\text{ mm }}]\) causes some fluctuations on the curve while in the \(\sigma -w\) curve obtained by a fitting range of \([0;4\,{\text{ mm }}]\) the fluctuations are avoided.

The influence of fitting range for mixtures 1 and 5
The decrease of the fitting range clearly shows that the local effect becomes more significant, but the \(\sigma -w\) curve obtained by a fitting range of [0;0.5 mm] follows the curve obtained by a fitting range of [0;4 mm]. This indicates that increasing the fitting range will create a mean value curve, which clearly removes the local effects. The phenomenon can be seen for the inverse analysis of mixture 5, where the fitting range is varied from 0.5 to 2 mm, see Fig. 17. Again the increase in fitting range creates a mean value curve that removes the disturbances. This also illustrates the capabilities of the adaptive analysis method of making detailed analysis in a narrow band of data. This creates the foundation for a robust inverse analysis method that treats multi-line \(\sigma -w\) relationships.
6 Conclusion
The study has derived an adaptive inverse analysis method for the determination of the uni-axial tensile strength, the Young’s modulus and the \(\sigma -w\). The method is robust and provides accurate fits between simulated \(P-w_{\text {cmod}}\) and \(P-w_{\text {cmod}}\) obtained by testing. The inverse method is fully general and can be employed for different mechanical problems in combination with different simulation methods, both the analytical, nonlinear cracked hinge model and data simulated by FEA. The least square fitting is conducted on un-weighted data and the original data range, which provides a very robust inverse analysis method. The adaptive inverse analysis is based on a global fitting approach in which a priori knowledge of the final shape of the \(\sigma -w\) relations is irrelevant. This enables a fully general method that can perform inverse analysis of any cementitious material with and without fiber reinforcement. Furthermore, the accuracy of the method is independent of fitting range and initial guess of direct tensile strength. This has created the basis for a fully automated inverse analysis method for determining the fracture mechanical parameters, \(\sigma _t\) and \(\sigma -w\), based on data from various test setups.
References
Barenblatt GJ (1962) The mathematical theory of equilibrium cracks in brittle fracture. Adv Appl Mech 7:55–129
Dugdale DS (1960) Yielding of steel sheets containing slits. J Mech Phys Solids 8:100–104
Hillerborg A, Modéer M, Petersson PE (1976) Analysis of crack formation and crack growth in concrete by means of fracture mechanics and finite element. Cem Concr Res 6:773–782
Petersson PE (1981) Crack growth and development of fracture zone in plain concrete and similar materials. Ph.D. Dissertation, Report TVBM-1006, Division of Building Materials, Lund Institute of Technology
Gopalaratnam VS, Shah SP (1987) Tensile failure of steel fiber-reinforced mortar. J Eng Mech 113:635–652
Cornelissen HAW, Hordijk DA, Reinhardt HW (1986) Experimental determination of crack softening characteristics of normal and lightweight concrete. Heron 31:2
Roelfstra PE, Wittmann FH (1986) Numerical method to link strain softening with failure of concrete. Fracture toughness and fracture energy of concrete. Elsevier, Amsterdam
Kitsutaka Y (1995) Fracture parameters for concrete based on poly-linear approximation analysis of tension softening diagram. Fracture mechanics of concrete structures. In: Wittmann FH (ed) Proceedings FRAMCOS-2
Kitsutaka Y (1997) Fracture parameters by polylinear tension-softening analysis. J Eng Mech 123:444–450
Uchida Y, Kurihara N, Rokugo K, Koyanagi W (1995) Determination of tension softening diagrams of various kinds of concrete by means of numerical analysis. Fracture mechanics of concrete structures. In: Wittmann FH (ed) Proceedings FRAMCOS-2, pp 17–30
Uchida Y, Barr BIG (1997) Tension softening curves of concrete determined from different test specimen geometries. Fracture mechanics of concrete structures. In: Mihashi H, Rokugo K (eds) Proceedings FRAMCOS-3, pp 444–450
Østergaard L (2003) Early-age fracture mechanics and cracking of concrete: experiments and modelling. Ph.D. Dissertation, Department of Civil Engineering, Technical University of Denmark
Østergaard L, Olesen JF (2004) Comparative study of fracture mechanical test methods for concrete, Fracture mechanics of concrete structures. Li V (ed) vol 11 IA-FraMCoS, USA, pp 455–462
Sousa JLA, Gettu R (2006) Determining the tensile stress-crack opening curve of concrete by inverse analysis. J Eng Mech 132:141–148
Slowik V, Villmann B, Bretschneider N, Villmann T (2005) Computational aspects of inverse analysis for determining softening curves of concrete. Comput Methods Appl Mech Eng 195:7223–7236
Skocek J, Stang H (2008) Inverse analysis of the eedge-splitting test. Eng Fract Mech 75:3173–3188
Ulfkjær JP, Brincker R, Krenk S (1990) Analytical model for moment-rotation curves if concrete beams in bending fracture behavior and design of materials and structures. In: Firrao D (ed) Proceedings 8th conference on Fracture-ECF8, Engineering Materials Advisory Services LTD, vol 2, pp 612–617
Ulfkjær JP, Krenk S, Brincker R (1995) Analytical model for fictitious crack propagation in concrete beams. J Eng Mech 121:7–15
Pedersen C (1996) New production processes, materials and calculation techniques for fiber reinforced concrete pipes. Ph.D. Dissertation. Department of Structural Engineering and Materials, Technical University of Denmark
Stang H, Olesen JF (1998) On the interpretation of bending tests on FRC materials. In: Mihashi H, Rokugo K (eds) Proceedings FRAMCOS-3, fracture mechanics of concrete structures, vol I, Aedificatio Publishers, Freiburg, Germany, pp 511–520
Stang H, Olesen JF (2000) A fracture mechanics-based design approach to FRC. In: Proceedings of the 5th Rilem Symposium on Fiber-Reinforced Concretes (FRCs), BEFIB
Olesen JF (2001) Fictitious crack propagation in fiber-reinforced concrete beams. J Eng Mech 127:272–280
Löfgren I, Stang H, Olesen JF (2005) Fracture properties of FRC determined through inverse analysis of wedge splitting and three-point bending tests. J Adv Concr Technol 3:423–434
Löfgren I (2005) Fibre-reinforced concrete for industrial construction: a fracture mechanics approach to material testing and structural analysis. Ph.D. Dissertation, Chalmers University of Technology
RILEM-TC-162-TDF (2002) Design of fiber reinforced concrete using the \(\sigma -w\) method: principles and applications. Mater Struct 35:262–278
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Jepsen, M.S., Damkilde, L. & Lövgren, I. A fully general and adaptive inverse analysis method for cementitious materials. Mater Struct 49, 4335–4348 (2016). https://doi.org/10.1617/s11527-015-0791-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1617/s11527-015-0791-3