
Abstract
Battery energy storage is critical to decarbonizing future power systems, and the cost of battery degradation within power system operations is crucial to ensure economic utilization of battery resources and provide a fair return to their investors. Power system operators dispatch assets by solving optimization problems of extreme complexity that include thousands of generators and transmission lines, and degradation models to be incorporated into power system optimization must be efficient to compute while capturing key degradation factors relevant to grid operations. This paper will compare various degradation models that are incorporable into power system optimization; each has different computation complexities and modeling focuses. This paper will summarize the pros and cons of different models, and how they may suit different battery technologies or configurations. Besides modeling, the paper discusses the opportunity cost of degradation and the battery warranty terms, both will impact the design and implementation of degradation models in power systems. The paper summarizes the comparison and future directions for designing degradation models for grid-scale batteries.
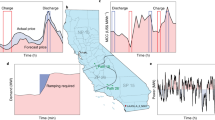
Graphical abstract

Similar content being viewed by others


Avoid common mistakes on your manuscript.
Highlights
-
The paper compares different battery degradation models in power system optimizations and summarizes how they suit different battery technologies and configurations.
-
Calendar degradation is the dominant factor affecting battery life expectancy in grid applications; higher cycle life and a more accurate degradation model provide better revenue, but the improvement in the life expectancy is not significant.
Discussions
-
Power system operators are currently experiencing computation difficulties when incorporating battery models into dispatch optimization; adoption of more accurate battery degradation models improves battery utilization and economic returns but must overcome computation challenges to meet power system operation timelines.
-
Non-modeling factors including degradation opportunity costs and warranty support are crucial factors to facilitate the adoption of battery degradation in power system operations.
-
Benchmarking with existing lithium-ion battery technologies, increasing calendar life may provide a better value proposition for developing future long-duration storage technologies, compared to increasing cycle life. Comprehensive economic assessments on cycle and calendar life characteristics should be incorporated into future battery developments.
Introduction
Battery energy storage is one of the most exciting developments in power systems over the past decade, and is becoming a crucial decarbonization resource as batteries can charge from renewable resources and discharge to replace thermal generations.1, 2 Successful use cases of grid-interactive battery projects have been deployed across the world, addressing one or multiple power system services, including integrating intermittent renewable energy, enhancing grid reliability and security, and reducing the total power system operating cost.3,4 Business models for grid-interactive batteries are undergoing rapid developments, with new regulatory supports that promote large-scale battery deployments in grid applications.5, 6

An overview of some representative battery degradation models from literature and a comparison of their accuracy and computation complexity.7,8,9,10,11,12 Bidding models are the simplest and do not model battery state-of-energy constraints. Energy-throughput models include the state-of-energy constraint and assume a constant rate of degradation with respect to battery energy throughput. The power degradation model assumes degradation rate increases with higher power or C-rate. Cycle-based degradation models reflect differences in degradation rate due to SoE levels and cycle depths. Cycle-based degradation models are formulated into linear or mixed-integer linear forms depending on the linearization technique. Equivalent circuit models capture the impact over current and voltage, while single-particle models will capture detailed degradation processes, including SEI film formation and crack propagation. Equivalent circuit models and single-particle models are nonlinear models and require specialized nonlinear solvers. In this paper, we will focus on linear programming and mixed-integer linear programming models that are incorporable into bulk power system optimizations.
Batteries consume no fuel to generate electricity and have negligible O&M costs.13 However, batteries cannot charge and discharge indefinitely due to their capacity degradation mechanisms,14 which reduces the battery’s remaining energy capacity and service lifetime. Battery owners can choose either to ignore battery degradation, with the risk that the battery reaches its end-of-life after two or three years of service, or to incorporate the degradation model into operation optimization, which trades off the application utility/revenue with the reduction rate of battery lifetime, making less daily revenue but significantly prolonging the battery lifetime.10 Environmental sustainability is another cause for limiting battery degradation rates in grid operation, as many battery compositions require rare materials such as nickel and cobalt,15 while the health and environmental impact of mining and recycling of these rare materials have not been fully factored into the battery cost. Therefore, even economically viable batteries should not be regarded as consumables but should be carefully managed to maximize their lifetime utilization.
Modeling battery degradation is sophisticated as degradation originates from various processes and their interactions.14. Plenty of studies have taken the perspective of battery owners to incorporate degradation into different grid-scale applications with models of various computation complexities. Incorporating degradation models significantly improves the battery lifetime expectancy and provides better investment returns. A more sophisticated model provides better modeling accuracy, which improves the optimality of the operation planning, but is also more computation demanding.16 Private battery operators may use more accurate and complex battery degradation models to optimize battery operation considering one or more applications. Many studies incorporated nonlinear battery degradation models and solved the optimization problem using particle swarm or other similar heuristics evolutionary optimization algorithms.17,18,19,20,21,22,23,24 Heuristic methods offer good computation speed against nonlinear models but do not provide optimality insights over the solution quality. Dynamic programming25,26,27 is another candidate for solving nonlinear degradation models but requires a careful approach to avoid the exponential state complexity.28 A comparative study shows that a nonlinear physics-based model based on a single-particle model could improve battery revenue by up to 20% while simultaneously decreasing degradation by 30% compared to a linear energy-throughput degradation model. The physics-based model was solved using a nonlinear optimization solver, and the computation speed is 10,000 times slower.8,29 Figure 1 provides a comparison of representative degradation models from literature in terms of their accuracy and complexity.
Consideration of battery degradation depends on the organization of the power system. In regions with bilateral electricity markets such as Europe, storage owners have a wide degree of freedom to optimize market transactions, especially utilizing intra-day markets,30 to manage battery degradation. Comparably, in centralized electricity markets, including most regions in North America,31 independent system operators perform centralized optimizations to match electricity supply and demand subjecting to transmission network constraints. Incorporating the degradation model into bulk power system optimization is therefore critical to ensure batteries are economically dispatched with other grid assets in these markets. Still, the model must be simple enough not to jeopardize the optimization computation speed. Battery owners have a significant degree of freedom in choosing the complexity of the degradation model when optimizing their battery systems, as these problems only consider a single or a few batteries, which are unlikely to cause computation challenges. Comparably, a real-scale bulk power system problem may include hundreds or even thousands of generators, transmission lines, and demand nodes. Slight increments in model complexity, such as adding storage state-of-energy constraints, may increase the solution difficulty significantly. A MISO (Mid-continent Independent System Operator)32 case study shows including around 150 linear energy storage models could increase the solution time of unit commitments by more than 100%, especially in hard cases; the average computation time increased from 1,010 seconds to 2,224 seconds, which exceeded the 20 min unit commitment solution deadline in MISO. A similar study using the NYISO (New York Independent System Operator) system,33 one of smaller scale compared to MISO, also shows including more than 100 linear storage models will double the unit commitment solution time.
Battery degradation models for bulk power system optimizations must be formulated into linear or mixed-integer linear programming models. Bulk power system optimizations include unit commitments and economic dispatches. Unit commitment models use mixed-integer linear programming to optimize the scheduling of generators in the power system ahead of the operating day based on forecast system demands, integers are primarily used to model generator start-up and shut-down logic, while other factors are formulated into linear cost terms or constraints such as generator cost curves, nodal power balances, and transmission line limits. Economic dispatch uses linear programming to dispatch resources during real-time operations based on generator commitment results,31 although sometimes integers may be used to model non-convex combined-cycle generator cost curves.34 Hence, battery degradation models must be described using linear cost functions and constraints to be incorporable into these optimizations, integer terms may be included but they will reduce the computation speed significantly.
Facilitated by FERC (Federal Energy Regulatory Commission) Order 841,35 all power system operators in the United States are exploring options to better address battery physical and operational characteristics in dispatch optimization and market clearings. Factoring degradation into the cost objective function is one focus,36 system operators, including California Independent System Operator (CAISO), are actively seeking ways to better address battery degradation in their market settlement models.7 This article introduces a few battery degradation models formulated using linear programming or mixed-integer linear programming. Some are currently being implemented by power system operators and summarize existing obstacles and future directions on degradation modeling. Sample cost curve and formulation in a price arbitrage example will be provided for each model. We will also address the importance of identifying the correct opportunity cost of degradation and non-technical barriers in modeling battery degradation in power system applications. We conclude the paper by proposing future directions for facilitating battery degradation models in power system operations.
Energy-throughput model
The first and the simplest battery degradation model is the energy-throughput model. This model is motivated by modeling battery capacity degradation as a proportional relationship to energy throughput—the amount of energy cumulatively charged and discharged from the battery. An alias to the energy-throughput model is the equivalent full-cycle model, which uses energy that fully cycles a battery as a unit for measuring energy throughput. Energy throughput is widely used for defining battery warranties, and the cost of degradation can be calculated conveniently using cost amortization. For example, if a battery has a rated lifetime of 3000 equivalent full cycles and the pack replacement cost is $150/kWh, then, a 1 MWh battery capacity can provide 3000 MWh of lifetime energy throughput, divide this value by the battery pack cost and the energy throughput cost becomes $50/MWh.
The following equation summarizes the energy-throughput degradation model:
that the change in the remaining capacity \(\Delta C\) has a linear relationship with a coefficient \(\alpha \) to the total energy charged \(p_t\) and discharged \(q_t\) into the battery. An example implementation using price arbitrage is listed as follows
in which \(\lambda _t\) is the electricity price, \(p_t\) is the discharged energy and \(q_t\) is the charged energy during each time step, c is the cost of degradation, and \(e_t\) is the stored energy in the battery. Note that for the convenience of modeling, we impose all degradation cost over the discharged energy which resembles the generation fuel cost, but this cost can also be shared by charge and discharge power if necessary. (2b) models the battery power rating P and (2c) models the energy rating. (2d) models the SoE evolution subjecting to efficiency \(\eta. \) Figure 2 shows the cost curve developed using the energy-throughput model. The y-axis is the price (also called the marginal cost) to charge or discharge the battery due to battery degradation, in unit of dollars per MWh. This model represents that the cost of degradation is indifferent to the power magnitude or depth of discharge. The battery will always try to perform a full cycle when the marginal benefit, such as price arbitrage profit, surpasses the marginal cost of degradation.

Energy-throughput degradation cost model.
The advantage of the energy-throughput model is its simplicity. The model only requires a single cost term in the objective function and the state-of-energy evolution constraint (2d) which models the change in the stored energy due to charge and discharge efficiencies, which is mandatory to model storage operation. The energy-throughput model does not use any additional auxiliary variables or constraints to model degradation, different from the more complex piece-wise linear models that will be introduced later in this paper.
The energy-throughput model is often the first choice when trying to model battery degradation in power systems. It has been extensively explored in battery integration studies37,38,39,40 and is exceptionally efficient to compute. In terms of accuracy, this degradation model is more applicable to batteries that are not sensitive to C-rate or depth of discharge, such as long-duration (low power rating) vanadium redox flow batteries and lithium iron phosphate (LFP) batteries. This model will be less accurate for batteries whose degradation rate has a strong dependency on the depth of discharge or output power, such as lithium-nickel-manganese-cobalt-oxide (NMC) or lead-acid batteries.41,42
Required by FERC Order 841, system operators in the United States are currently incorporating energy-throughput models into their day-ahead unit commitment optimizations, which optimizes the scheduling of all generation resources a power system over a horizon of 24 h. Yet, including energy storage into unit commitment optimizations increased the computation time dramatically. A case study32 using MISO system (covering 15 U.S. states from Louisiana to North Dakota and the Canadian province of Manitoba) shows that including a battery energy storage model in day-ahead unit commitment would increase the computation time by more than 100% from around 1,000 seconds to more than 2200 seconds, which exceeded the 20-minute day-ahead market clearing time allowance. Another study33 using the NYISO system shows a similar magnitude of computation time increase in unit commitments when incorporating energy storage models. However, it is worth noticing that the primary cause of the increased computation speed is due to modeling the state-of-energy constraint (2d), which introduces strong inter-temporal coupling to the optimization, despite this constraint is indispensable for the energy-throughput model or other more sophisticated degradation models.
Bidding model
The motivation of the bidding cost model is not to better model battery operation or degradation, but because this model is the easiest to implement in power system dispatch software. The bidding model treats energy storage as a combination of a generator and a flexible demand. The storage submits a generation bid indicating price levels above which the battery is willing to discharge, and demand bids indicating price levels below which the battery is willing to charge. Storage owners can update bids an hour ahead based on recalculated market values. As shown in Fig. 3a, the model includes a higher discharge bid and a lower charge bid. If the market price rise above the discharge offer, the battery will discharge energy into the grid; if the price drops below the charge bid, the battery will charge from the grid; if the price falls between the discharge and charge bids, the battery will remain idle and do nothing.

Bidding cost model (a) and average day-ahead battery bids and nodal prices (Q3 2019–2020) from CAISO.43
The idea of the bidding model is to let the storage owner design bids based on their own predictions of future market prices and knowledge about the storage model. These bids should capture both the opportunity to charge or discharge in order to maximize the market profit, but also capture the physical characteristic of the storage technology such as efficiency, energy capacity, and degradation.44, 45 The bidding design problem only considers single storage and therefore is much simple in scale compared to power system dispatch, making it possible to incorporate a more accurate and sophisticated battery model.46,47 In terms of degradation, the gap between the discharge and charge bids should be no smaller than the cycle degradation cost of the battery, so that the battery will recover this cost. Of course, the owner can further increase the bid gap to better capture price peaks and valleys when prices are volatile. Figure 3b shows the average day-ahead battery bids and nodal prices in California ISO from Q3 2019 to 2020. In the figure, the minimum gap between charge and discharge bids is around 20$/MWh which is likely driven by the battery degradation cost, but the gap grows larger, especially during 2020 Q3 and Q4 possibly to better capture discharge opportunities with increased price volatilities.
The advantage of the bidding cost model is that it relieves the system operator from modeling the physical characteristic of energy storage, especially the state-of-energy constraint which is the major contributor to increasing unit commitment solution time by folds as mentioned in the previous section. Without needing physical parameters, the bidding model is also suitable for battery aggregations or virtual power plant that does not have a specific single unit model. An example implementation using price arbitrage of the bidding model is listed as follows
Note that this model does not model battery SoE at all. \(c{}^{\mathrm {p}}\) represents the discharge bid and \(c{}^{\mathrm {q}}\) represents the charge bid, the charge bid is incorporated as a negative value to model the willingness to consume. The bidding cost model does not require new modules in the dispatch software but simply combines two existing models: generator and flexible demand. The bidding cost model also allows storage to be economically dispatched in real-time markets since most systems clear the real-time market considering only a single-time period. While some operators like CAISO48 and NYISO49 have incorporated a look-ahead of around 1 h into their real-time dispatch for better modeling ramping and start-up constraints as the system become more volatile due to increased renewable penetration, this is insufficient to capture the daily charge, and discharge opportunity for storage as the peak prices usually happens in late afternoons while the valley prices in the morning. Therefore, by letting storage owners design bids based on their own expectations of future prices, the system operator can decide when to charge or discharge storage based on submitted bids along. Currently, all system operators in the United States have implemented the storage bidding model in response to FERC Order 841 [4], which allows storage to bid as a combination of generator and flexible demand.
The disadvantage of the bidding model is also obvious: the model is a less accurate representation of battery energy storage because of neglecting the SoE constraint. The value of bids must be designed just right for the battery to capture the right charge or discharge opportunities. For example, a discharge bid too high will cause the battery not to be dispatched during peak demand periods, while a discharge bid too low will cause the battery to discharge too early and with no more energy to provide during system peaks. Without modeling the battery SoE constraint, system operators may overcharge or discharge a battery50, forcing the battery to deviate from system dispatch commands. As a result, the bidding model may provide lower profit for the storage owners and lower utilization to reduce system operating costs.
Power degradation model
The power degradation model differentiates the battery degradation rate based on the magnitude of the charge or discharge power, which can be approximately equivalent to C-rates assuming stable battery terminal voltages. The underlying assumption of this model is that higher C-rates will accelerate battery degradation rate, which is widely observed in degradation tests. We can model the C-rate-based degradation mode as
in which the function f is strict-monotonically increasing (i.e., its derivative is strictly greater than zero) which models the increased rate of degradation due to higher charge or discharge power. An example implementation using price arbitrage is listed as follows
which is similar to the energy-throughput model except the discharge power is divided into segments \(p_{t,j}\), and each segment is associated with a discharge cost \(c_j\) and power limit \(P_j\).
The power degradation model has the same mathematical form as the fuel heat-rate curve of thermal generators, in which the generator efficiency reduces as the output power increases, leading to higher marginal production cost.31 Hence, we can apply the same linearization technique and obtain piece-wise linear cost curves as shown in Fig. 4, which shows the marginal cost of degradation increases in steps as the battery C-rate increases. Based on the fact that a higher C-rate always leads to a higher rate of degradation, this power cost function is naturally convex, thus the linearized cost curve can be implemented using linear programming without introducing binary variables. Because the variation in the degradation cost only relates to the power magnitude, the power degradation model is incorporable with other degradation models to reflect the accelerated degradation rate due to higher power, whereas the remainder of the model can focus on the cycle life such as the energy-throughput model mentioned earlier or the cycle depth model which will be introduced in the next section. The power degradation model also suits the bidding cost model in which case the charge and discharge bids become price-power segments, a feature that is already available in all market clearance models.

Power degradation cost model.
The power degradation model suits batteries whose degradation rate is sensitive to C-rate. This factor is more critical to battery storage with durations of less than an hour but less for storage with longer durations, as lab degradation test data suggest that C-rate higher than one will significantly increase battery degradation rates.51 Modeling power degradation rate was crucial in early grid-scale battery projects which were designed with less than 30 minutes duration due to high battery cell cost at the time and the target grid application was limited to providing frequency regulations that have low energy capacity requirements. However, as battery cost drops over the years and the grid application extends to peak shavings and price arbitrages, current grid-scale lithium-ion battery energy storage systems mostly have durations longer than 2 h, [4,52 at which point the maximum C-rate is less than 0.5 and its impact over degradation rate is not significant. On the other hand, other upcoming long-duration energy storage technologies are aiming for 6 h or even longer durations, hence their degradation rate may not be sensitive to C-rates. Therefore, power degradation models may be less important in future power system dispatches.
An alternative use of the power degradation model was to model the impact of depth of discharge in degradation, as, during a fixed time horizon, higher power also increases the depth of discharge, in which case degradation caused by a higher power and higher depth of discharge are equivalent from a modeling perspective. However, accurately using this approach to model depth of discharge requires pre-determining the time period during which the battery charges or discharges, but this is also part of the decision that ought to be determined by the optimization itself. In this case, dynamic programming can be applied to keep track of the depth of discharge as a state and correlate it to the cost of power degradation,26,53 but this technique is limited to single storage and cannot be extended to large-scale power system dispatch due to the exponential complexity growth of states.54
Rainflow-based cycle depth cost model
The cycle depth degradation cost model is motivated by lab test results that the rate of degradation is critically dependent on the range of the cycle. In one study on NMC batteries,55 cycling a battery between 45 and 55% SoE range may only cause 1% of the capacity loss compared to a cycle between 0 and 100% SoE, or equivalently, 10% of the degradation rate when measured using energy throughput. To this end, it is more convenient to calculate incremental battery capacity degradation based on the combination of cycles of various depths, instead of using power rating or SoE time series.
The Rainflow cycle counting algorithm initially developed for material fatigue analysis emerged as a suitable tool that decomposes a given SoE time series into combinations of cycles.56,57,58 As shown in Fig. 5, the Rainflow algorithm decomposes the example SoE profile into a combination of two 10% cycles and one 40% cycle. The advantage of the Rainflow algorithm is it captures the super-position relationship between cycles, as shown in this example that the two 10% cycles coincide in time with the larger 40% cycles so that a transient switch between charge and discharge will not affect the overall trend in the cycle identification. The Rainflow-based degradation model can be represented as
in which \(m_i\) represents the depth of cycle i, the function f() models the degradation rate due to different cycle depths; instead of feeding the power profile directly, this model uses the Rainflow cycle counting algorithm to pre-process the power profile (we can generalize the SoE profile as the integral of power profile subjecting to efficiencies) into combinations of cycles. The Rainflow-based cycle depth model has been widely adopted for ex-post estimation of battery degradation56,57,59 in which the battery project planner wishes to estimate the battery degradation rate from given SoE profiles.

Using the rainflow algorithm to identify battery cycle depths.
Although the Rainflow cycle counting algorithm itself has no closed-form mathematical expressions and cannot be incorporated directly into linear programming, recent studies have shown that the Rainflow algorithm is convex and can be converted into a piece-wise linear format.11 Figure 6 shows the cost curve for a linearized Rainflow-based cycle depth degradation cost model. In this model, the marginal cost for charging or discharging the battery increases in steps as the battery cycles deeper. Each linearization segment has a private auxiliary energy state variable and constraints. Because the shallower segment always has lower costs, the battery will always prioritize shallower segments first for charge and discharge to reduce the total cost. This dispatch logic has been proved to follow the same principle as the Rainflow cycle counting algorithm.10 As a result, this cost model will drive batteries to switch between charge and discharge and avoid deep cycles. An example implementation of the cycle depth degradation model in price arbitrage is
Compared to the energy-throughput model or the power degradation model, the cycle depth model divides battery energy capacity into segments \(E_j\) and each segment has its private SoE evolution constraint. Unlike the power degradation model, each segment does not have its own power capacity constraint.

Rainflow-based depth degradation cost model.
The cycle depth model is more suitable for batteries whose degradation rates are sensitive to cycle ranges, such as Lead-acid, NMC, and NCA batteries, which in lab experiments show their lifetime energy throughput decreases significantly with deeper cycles. For other battery technologies such as VRFB and LFP, the impact of cycle depth is less significant over the degradation rate. Although the cycle depth degradation model is naturally convex and does not need binary variables, it has to introduce auxiliary state variables and constraints for each additional linearization segment. To this end, despite being a linear model, the model is computationally expensive in large-scale power system optimizations. The cycle depth model also does not differentiate the starting and ending SoE point of cycles, i.e., cycling a battery between 60 and 70% or between 20 and 30% SoE produces the same cycle depth, while lab tests have shown that the corresponding SoE ranges also play a significant role in the degradation rate.
State-of-energy cost model
The state-of-energy degradation model assumes the rate of degradation is dependent on the SoE level when the battery charges or discharges, motivated by lab degradation test data that SoE has a dominant impact over degradation rate.55,56 The major difference between the SoE degradation model and the Rainflow-based cycle depth model is the SoE degradation model assumes a one-to-one relationship between the degradation rate and the SoE, while the Rainflow-based cycle evaluates degradation only using cycle depth and decouples it from the SoE levels. The SoE degradation model is written as
in which we represent the cost of degradation as a function of the battery SoE \(e_t\). This model has been widely adopted in battery integration studies to model the dependency of degradation rate over SoE or depth of discharge (DoD).60,61,62,63 Figure 7 shows two examples of the SoE cost curve; in Fig. 7a, the degradation rate is the lowest at around 50% and goes up when SoE is close to 0% or 100%. This model captures factors that deeper cycles accelerate degradation and cycles centered at high or low SoE levels also accelerate degradation rates. Figure 7b shows a form in which higher SoE imposes lower costs of degradation, which more strictly models the depth of discharge as the difference between current SoE levels and the 100% SoE, which is used by some battery manufacturers as the cycle degradation test protocols. Notably, both models will avoid deep cycles similar to the Rainflow-based cycle depth model but will produce different battery operation profiles. The SoE degradation model in Fig. 7a will center the battery SoE to around 50%, and the model in Fig. 7b will keep the battery SoE above 60%, while the Rainflow-based cycle depth model will not prefer any SoE level over with cycles performed.

State-of-energy mapped degradation cost model with two examples: (a) the degradation cost is lowest around 50% SoE and becomes higher when near 100% or 0% SoC; (b) the degradation cost becomes higher as the SoE drops deeper.
The SoE degradation model is also the most computationally expensive of all the models introduced in this paper. The degradation model is nonlinear as it includes the product of power and the SoE level, both are optimization variables. It is possible to linearize the SoE degradation model using a piece-wise linearization but must introduce auxiliary binary variables to enforce the segment logic. An example implementation of the SoE degradation model in price arbitrage is
This model is different to the cycle depth model for introducing auxiliary binary variables \(u_{t,j}\) for enforcing the SoE logic, \(u_{t,j}\) equals one if the SoE segment j is full during time period t, otherwise \(u_{t,j}\) equals to zero. As shown in (9e), the SoE of segment j is limited to zero if the lower segment \(j-1\) is not full (\(u_{t,j-1} = 0\)), vice versa, if segment j wishes to take on non-zero values, its lower segment \(j-1\) must be full (\(u_{t,j-1} = 1\)). Hence, the model enforces the SoE evolution logic.
In the example of the model shown in Fig. 7a, the marginal cost of charge or discharge is lowest when the battery SoE is between 40 and 60% but becomes higher when outside this range. Similar to the Rainflow-based cycle depth model, each segment has its private energy state and constraints. However, the model is not convex which means without the use of binary variables, the result of the optimization may deviate from the physical model. For example, consider charging and discharging an empty battery, the optimization will always prioritize cheaper segments and charge the 40% to 60% SoE segment first instead of the 0% to 40% segment. To this end, we must introduce auxiliary binary variables to enforce physics logic, preventing the battery to charge upper segments unless lower segments are full. The combined use of auxiliary states, constraints, and binary variables makes this model the most complex one, and unlikely to be computationally tractable in large-scale power system optimizations.
Model comparison in price arbitrage
Table 1 shows a comparison of the five proposed battery degradation models in performing price arbitrage to demonstrate their performance in computation time, market revenue, and degradation. The accuracy of these models is loosely ranked in ascending order, while a more accurate model also requires more decision variables and constraints to model more complex degradation mechanisms. Especially, binary variables and inter-temporal constraints will increase the computation time of large-scale optimization problems significantly, which power system operators will try to avoid when designing new market models. As for battery technologies and configurations, the bidding model does not presume any battery physical models but requires the battery owner to design bids that best fit their battery technology. The energy-throughput model is the default and simplest approach to model degradation and would be sufficient for technologies that are insensitive to cycle range such as vanadium redox flow batteries and LFP batteries. Batteries that have sensitive degradation rates with respect to depth of discharge such as NMC and LCA will need the cycle depth model or the SoE degradation model to reflect the surging degradation rate during deep cycles, while an alternative approach is to use the energy-throughput model but limits the SoE range to avoid deep cycles, for example, set hard SoE limits to between 20 and 90%. Storage with less than 2 h duration may need to use the power degradation model to reflect accelerated degradation rate at higher C-rates, but this may not be necessary for storage with longer durations.
In the arbitrage case study, we use the real-time price data from New York City during the entire year 2019, we assume a 500 kW/1 MWh battery with 81% round-trip efficiency. The battery pack replacement cost is $150/kWh, and the cycle degradation data for LFP and NMC battery is from literature.41 The LFP battery produces near 8,000 equivalent full cycles (EFC) between 40 and 60% SoE, and around 6,000 EFCs when cycled between 0 and 100% SoE. The NMC battery produces nearly 2,000 EFCs between 40 and 60% SoE, but less than 500 EFCs when cycled between 0 and 100% SoE. To reflect the accelerated degradation rate when cycling at higher SoE,55 we linearly increase the degradation rate by up to 100% as the center of a cycle deviates from 50% SoE, i.e., a cycle ranging from 50% to 100% SoE will cause 1.5 times degradation compared to a cycle ranging from 25% to 75% SoE. We also assume the battery has a 10-year rated calendar life and the end-of-life is 80% remaining capacity. This degradation model is simplified into each optimization model, while the degradation result shown in the table is estimated using an ex-post nonlinear Rainflow degradation model.56 In the power degradation model, we use the cycle degradation data for the power degradation curve, assuming smaller battery power will also lead to shallower cycles. In the bidding model, the optimal bids are generated using a dynamic programming algorithm,64] the computation time does not count in the optimal bidding problem, but only includes the simulation time to execute battery operation based on submitted bids. All other models are implemented in Julia and solved using Gurobi, the computation time only includes the Gurobi solver time.
The result shows that the most sophisticated SoE degradation model provides the best trade-off between market revenue and incremental degradation, especially for NMC the model increased the lifetime expectation by one year while making similar revenue compared to the cycle depth model. For LFP whose degradation rate is not very sensitive to cycle depth, the cycle depth model and the energy-throughput model performed similarly, while the power degradation model earned a bit more revenue and caused the highest degradation. For NMC whose degradation rate is highly sensitive to cycle depth, the cycle depth model performs much better than other models. The bidding model provides the worst revenue in all cases as it does not model battery physical characteristics. For comparison, we also include results when optimizing battery operation without a degradation model, which led to a significantly higher degradation rate.
On the computation time, the SoE degradation model is clearly the most computationally inefficient one, it takes around 25 to 50 times more to solve than other models due to using binary variables to enforce the linearization logic. All other models were solved in around one to two seconds because price arbitrage is a simple optimization problem. However, one must pay attention to the relative change in the computation time, the energy-throughput model is about 50% slower than the bidding model, while the cycle depth model is around 100% lower than the energy-throughput model. Notably, the number of inter-temporal constraints, which is the SoE constraint in battery models, is the major contributor to computation complexities. In our example, the cycle depth model uses three linearization segments, meaning it has two times more SoE constraints compared to the energy-throughput model. In other words, one-cycle depth storage model with three linearization segments has the same computation complexity as three energy-throughput storage models. In the MISO test system that 150 simple storage models increased the unit commitment solution time by 100%, this would mean 50 cycle depth models would provide the same computation slow down.
Finally, we compared the battery life expectancy of LFP and NMC batteries. When ignoring the battery degradation model, the NMC battery dies within one year while the LFP battery lasted around 4 years, similar to the cycle life data that the LFP battery provides four to ten times more cycles depending on different cycling ranges. However, after incorporating degradation models, both NMC and LFP reached around eight years of life, while LFP earned more revenues. For both LFP and NMC batteries, the dominant lifetime factor turned out to be calendar degradation, while the revenue is more dependent on the cycle life and the choice of degradation model.
Monetizing battery degradation
Monetizing the value of battery capacity loss is another crucial aspect for modeling degradation in power system operation: we must quantify the cost to the battery owner if the battery lost one unit of remaining capacity. The objective function in bulk power system optimization is to minimize the operating cost, thus regardless of the optimization model, the reduction in the remaining capacity or lifetime must be monetized as a dollar per MWh cost term into the objective function. A common approach here is to amortize the battery pack replacement cost over the incremental capacity loss, which has been introduced in the energy-throughput degradation model. Battery cost amortization is the most common approach to define the cost of battery degradation in industry and academia, studies have shown this approach can significantly improve battery market profitability.10,58
Yet, the main drawback of the replacement cost amortization approach is it neglects calendar degradation, which occurs simultaneously regardless of battery cycles.14 For example, the daily price spread in the day-ahead energy market is usually around $20/MWh to $50/MWh, operating a battery using the $100/MWh amortized operating cost will lead to zero market revenue. This is also reflected in Table 1 that in the case of NMC batteries, the bidding model earns very low revenue and also incurred low cycle degradation, but the overall battery lifetime is only about 10% higher than in other cases due to calendar degradation. The battery should at least make $40 to $100 per kWh capacity revenue based on the one-cycle per day cycle life. He et al.65 pointed out that replacement cost should be treated as a sunken investment cost, and instead, degradation should be priced based on the missed future opportunity due to capacity loss and earlier battery retirement. To provide an illustrative example of the opportunity cost of degradation, assuming a battery has a warranty specifying 10 years of calendar life, each cycle will reduce the battery capacity by 0.01% and lead to the warranty expiring one day earlier. Therefore, the cost of the battery’s first cycle should be priced by accounting for both: 1) profit opportunities missed because the battery has 0.01% less usable capacity over the rest of its lifetime; 2) the revenue from the last day over the 10 years because the battery must expire one day earlier according to the warranty; 3) discount factor must be included in all these calculations.
The above example shows that quantifying the value of battery degradation is not an intuitive process and requires a systematic mathematical tool. He et al.65 used an iterative approach to finding the optimal marginal degradation cost that maximizes the lifetime revenue of the battery pack. A recent work from the author66 employs dynamic programming to calculate the opportunity cost of battery degradation, which shows that the opportunity cost of degradation is critically dependent on the state of health (remaining capacity) and the market condition, see Fig. 8 for an example. Yet, both of these two frameworks assume deterministic futures and ignore uncertainty factors in power systems such as future load growth and change in the generation resource mix.

The opportunity cost of performing one equivalent full cycle (EFC) of a battery performing real-time arbitrage in Long Island, NY. The battery in this study has a 2-h duration, end-of-life at 60% remaining capacity, and 10-year calendar life before reaching end-of-life, and each EFC will reduce its remaining capacity by 0.0055%.
Challenges beyond computation: warranty standardization
Incorporating battery degradation into power system operation is not only a computation challenge, fitting a battery project to a degradation model also requires warranty support. In practice, most battery owners rely on manufacturer warranties to specify detailed degradation models, while these warranties are often written in terms that can be verified with field measurements, instead of trying to accurately model the underlying degradation process. An example of a typical warranty is to limit the battery owner only to exercise one equivalent full cycle per day, any additional cycles within one day will significantly reduce the warranty duration. Of course, a real-world warranty will describe this requirement with overwhelming details specifying current rate, voltage, temperature, etc., varying between manufacturers and application scenarios. Although no known battery chemistry is limited to only cycling once per day, such a one-cycle-per-day warranty becomes popular in practice because both parties can easily verify with field measurement data recording the energy throughput of the battery daily. However, this warranty will cause difficulties in modeling the degradation, as enforcing a battery to only cycle once per day in power system optimization is a more computationally challenging task than adding a cost of degradation as it requires binary variables.
Tedious warranty terms that vary from manufacturer to manufacturer are a major obstacle for modeling battery degradation in grid dispatch. Large battery users may have better power to negotiate warranty terms that suits their application needs, while other smaller battery project developers must follow warranties that are conservatively designed favoring the manufacturer. Not only will conservative warranties reduce the user’s flexibility to optimize battery operation, but it is also impossible for the system operator to design a new market dispatch model tailored to each battery warranty due to the complexity of updating grid dispatch software. Instead, system operators will likely use a unified and simple degradation cost model for all battery energy storage. The battery owner could submit the degradation cost based on the best knowledge of the battery technology beyond warranty terms but must face the risk of either following the system dispatch and voiding the warranty or being penalized for violating dispatch to follow warranty terms. Any of these options due to conservative warranty terms could lead to risks of financial loss to the battery owner.
Incorporation of degradation cost in power system dispatch must base on standardized battery lifetime warranty terms per grid dispatch requirements. Ideally, the system operator should develop a unified battery degradation model in dispatch optimization, and battery manufacturers would develop warranty terms accordingly. Motivated by the energy-throughput degradation model, some recent battery warranties are now structured based on energy throughput or equivalent full cycles. However, more sophisticated degradation models are necessary to further improve battery economics and grid utilization, and designing these models requires consensus among all stakeholders in the business, including power system operators, battery manufacturers, battery energy storage developers, and battery investors. Supporting warranty verification and battery diagnosis schemes are also required.
Conclusion and future directions
In this paper, we demonstrated a few degradation models that are incorporable into bulk power system optimizations and discussed the pros and cons of each model in terms of accuracy, computation complexity, and suitability to different battery technologies. Incorporating degradation models, even the simplest energy-throughput model could significantly improve the battery lifetime expectancy. After modeling cycle degradation into grid optimizations, calendar degradation emerged to be the dominant factor of battery lifetime, while a more accurate degradation model would provide a better trade-off between revenue and lifetime. Higher cycle life increases market revenue but the rate of gain diminishes. Hence, increasing calendar life may provide better value propositions compared to increasing the battery cycle life, especially for future long-duration storage technologies with 10-plus hour durations as they will cycle less often than existing battery projects. In our case study, LFP batteries have around four to ten times more cycle life compared to NMC batteries, but LFP only earned 70% more revenue than NMC and the life expectancy is similar. Therefore, economic assessments with accurate degradation models and market scenarios should be carefully studied when designing future battery technologies to trade off the lifetime and economic value expectancy.
Although more sophisticated battery degradation models such as the cycle depth model, the SoE degradation model, and even some more complex nonlinear models are not ready for implementation in bulk power system operations due to computation complexity, the future may be different. Of course, in an optimistic future, we may have more advanced computing hardware and solution algorithms that could incorporate these models into bulk power systems. On the other hand, a decarbonizing power system will involve less traditional generators but more renewable resources that do not need to be scheduled. To this end, accurate degradation models will not only be necessary as batteries will be the main flexibility resource but also computation affordable as the system will have fewer thermal generators to optimize. Nevertheless, linear programming will likely remain the primary choice for designing battery models in power systems due to its robust computation performance in large-scale optimization.
Finally, we must be aware of factors beyond modeling when considering degradation in power system operations, such as the economic opportunity cost of degradation, and the limitations of warranties. In the paper, we provided a brief introduction to the opportunity cost of degradation which characterizes the cost of capacity reduction based on lost opportunities from future operations. We also discussed how conservative warranty terms advantaging battery manufacturers may jeopardize the utilization of storage in the power system. As grid-scale batteries become the main players in future power systems, we could expect more standardized financial derivatives and warranty terms that root from battery degradation in power system operation and electricity market participation. Overall, these developments should help to reduce investment risks in battery projects and enable better utilization of batteries’ flexibility value in power systems.
Data availability
The battery degradation data used to perform the analysis are from published literature,41 the simulation code is available here: https://bolunxu.github.io/assets/codes/Compare_deg_model.zip.
References
K. Divya, J. Østergaard, Battery energy storage technology for power systems-an overview. Electr. Power Syst. Res. 79, 511–520 (2009)
N.-K.C. Nair, N. Garimella, Battery energy storage systems: assessment for small-scale renewable energy integration. Energy Build. 42, 2124–2130 (2010)
F.J. De Sisternes, J.D. Jenkins, A. Botterud, The value of energy storage in decarbonizing the electricity sector. Appl. Energy 175, 368–379 (2016)
A. Sakti, A. Botterud, F. O’Sullivan, Review of wholesale markets and regulations for advanced energy storage services in the united states: current status and path forward. Energy Policy 120, 569–579 (2018)
S. Agnew, C. Smith, P. Dargusch, Causal loop modelling of residential solar and battery adoption dynamics: a case study of Gueensland, Australia. J. Clean. Product. 172, 2363–2373 (2018)
T.A. Faunce, J. Prest, D. Su, S.J. Hearne, F. Iacopi, On-grid batteries for large-scale energy storage: Challenges and opportunities for policy and technology. MRS Energy Sustain. 5, 15 (2018)
Energy storage and distributed energy resources phase 4, 2019. [Available Online (last accessed 06/2022)] http://www.caiso.com/InitiativeDocuments/RevisedStrawProposal-EnergyStorage-DistributedEnergyResourcesPhase4.pd
J.M. Reniers, G. Mulder, S. Ober-Blöbaum, D.A. Howey, Improving optimal control of grid-connected lithium-ion batteries through more accurate battery and degradation modelling. J. Power Sources 379, 91–102 (2018)
V. Ramadesigan, P.W. Northrop, S. De, S. Santhanagopalan, R.D. Braatz, V.R. Subramanian, Modeling and simulation of lithium-ion batteries from a systems engineering perspective. J. Electrochem. Soc. 159, R31 (2012)
B. Xu, J. Zhao, T. Zheng, E. Litvinov, D.S. Kirschen, Factoring the cycle aging cost of batteries participating in electricity markets. IEEE Trans. Power Syst. 33, 2248–2259 (2017)
Y. Shi, B. Xu, Y. Tan, B. Zhang, A convex cycle-based degradation model for battery energy storage planning and operation. in Annual American Control Conference (ACC). IEEE 2018, 4590–4596 (2018)
R.K. Bansal, P. You, D.F. Gayme, E. Mallada, Storage degradation aware economic dispatch, in American Control Conference (ACC). IEEE 2021, 589–595 (2021)
B. Zakeri, S. Syri, Electrical energy storage systems: a comparative life cycle cost analysis. Renew. Sustain. Energy Rev. 42, 569–596 (2015)
J. Vetter, P. Novák, M.R. Wagner, C. Veit, K.-C. Möller, J. Besenhard, M. Winter, M. Wohlfahrt-Mehrens, C. Vogler, A. Hammouche, Ageing mechanisms in lithium-ion batteries. J. Power Sources 147, 269–281 (2005)
E.A. Olivetti, G. Ceder, G.G. Gaustad, X. Fu, Lithium-ion battery supply chain considerations: analysis of potential bottlenecks in critical metals. Joule 1, 229–243 (2017)
D.M. Rosewater, D.A. Copp, T.A. Nguyen, R.H. Byrne, S. Santoso, Battery energy storage models for optimal control. IEEE Access 7, 178357–178391 (2019)
S. Wang, D. Guo, X. Han, L. Lu, K. Sun, W. Li, D.U. Sauer, M. Ouyang, Impact of battery degradation models on energy management of a grid-connected dc microgrid. Energy 207, 118228 (2020)
B.O. Alawode, U.T. Salman, M. Khalid, A flexible operation and sizing of battery energy storage system based on butterfly optimization algorithm. Electronics 11, 109 (2022)
A.J. Jordehi, An improved particle swarm optimisation for unit commitment in microgrids with battery energy storage systems considering battery degradation and uncertainties. Int. J. Energy Res. 45, 727–744 (2021)
M.A. Hossain, H.R. Pota, S. Squartini, F. Zaman, J.M. Guerrero, Energy scheduling of community microgrid with battery cost using particle swarm optimisation. Appl. Energy 254, 113723 (2019)
C. Hu, G. Jain, P. Zhang, C. Schmidt, P. Gomadam, T. Gorka, Data-driven method based on particle swarm optimization and k-nearest neighbor regression for estimating capacity of lithium-ion battery. Appl. Energy 129, 49–55 (2014)
L. Zhang, L. Wang, G. Hinds, C. Lyu, J. Zheng, J. Li, Multi-objective optimization of lithium-ion battery model using genetic algorithm approach. J. Power Sources 270, 367–378 (2014)
G. Merei, C. Berger, D.U. Sauer, Optimization of an off-grid hybrid pv-wind-diesel system with different battery technologies using genetic algorithm. Solar Energy 97, 460–473 (2013)
S. Bashash, S.J. Moura, J.C. Forman, H.K. Fathy, Plug-in hybrid electric vehicle charge pattern optimization for energy cost and battery longevity. J. Power Sources 196, 541–549 (2011)
U. Salman, K. Khan, F. Alismail, M. Khalid, Techno-economic assessment and operational planning of wind-battery distributed renewable generation system. Sustainability 13, 6776 (2021)
K. Abdulla, J. De Hoog, V. Muenzel, F. Suits, K. Steer, A. Wirth, S. Halgamuge, Optimal operation of energy storage systems considering forecasts and battery degradation. IEEE Trans. Smart Grid 9, 2086–2096 (2016)
P. Aaslid, M.M. Belsnes, O.B. Fosso, Optimal microgrid operation considering battery degradation using stochastic dual dynamic programming, in: 2019 International Conference on Smart Energy Systems and Technologies (SEST), IEEE, 2019, pp. 1–6
R.E. Bellman, S.E. Dreyfus, Applied Dynamic Programming (Princeton University Press, Princeton, 2015)
J.M. Reniers, G. Mulder, D.A. Howey, Unlocking extra value from grid batteries using advanced models. J. Power Sources 487, 229355 (2021)
H. Beltran, P. Ayuso, J. Cardo-Miota, J. Segarra-Tamarit, N. Aparicio, E. Pérez, Influence of the intraday electricity market structure on the degradation of li-ion batteries used to firm photovoltaic production, Energy Technol. (2022) 2100943
D.S. Kirschen, G. Strbac, Fundamentals of Power System Economics (Wiley, New York, 2018)
Y. Chen, R. Baldick, Battery storage formulation and impact on day ahead security constrained unit commitment, IEEE Trans. Power Syst. (2022)
M. Musto, Day ahead network constrained unit commitment performance, 2020. [Available Online (last accessed 06/2022)] https://www.ferc.gov/sites/default/files/2020-06/T2-2_Musto_0.pdf
F. Campos, J. Reneses, Energy and reserve co-optimization of a combined cycle plant using mixed integer linear programming,. J. Eng. Gas Turbines Power 136, 18 (2014)
FERC, Electric storage participation in markets operated by regional transmission organizations and independent system operators, 2018. [Available Online (last accessed 06/2022)] https://www.ferc.gov/whats-new/comm-meet/2018/021518/E-1.pdf
N.G. Singhal, E.G. Ela, Pricing impacts of state of charge management options for electric storage resources, in IEEE Power & Energy Society General Meeting (PESGM). IEEE 2020, 1–6 (2020)
B. Xu, Y. Wang, Y. Dvorkin, R. Fernández-Blanco, C.A. Silva-Monroy, J.-P. Watson, D.S. Kirschen, Scalable planning for energy storage in energy and reserve markets. IEEE Trans. Power Syst. 32, 4515–4527 (2017)
M.F. Zia, E. Elbouchikhi, M. Benbouzid, Optimal operational planning of scalable dc microgrid with demand response, islanding, and battery degradation cost considerations. Appl. Energy 237, 695–707 (2019)
F. Wankmüller, P.R. Thimmapuram, K.G. Gallagher, A. Botterud, Impact of battery degradation on energy arbitrage revenue of grid-level energy storage. J. Energy Storage 10, 56–66 (2017)
I. Mathews, B. Xu, W. He, V. Barreto, T. Buonassisi, I.M. Peters, Technoeconomic model of second-life batteries for utility-scale solar considering calendar and cycle aging. Appl. Energy 269, 115127 (2020)
Y. Preger, H.M. Barkholtz, A. Fresquez, D.L. Campbell, B.W. Juba, J. Romàn-Kustas, S.R. Ferreira, B. Chalamala, Degradation of commercial lithium-ion cells as a function of chemistry and cycling conditions. J. Electrochem. Soc. 167, 120532 (2020)
L. Wei, X. Fan, H. Jiang, K. Liu, M. Wu, T. Zhao, Enhanced cycle life of vanadium redox flow battery via a capacity and energy efficiency recovery method. J. Power Sources 478, 228725 (2020)
California iso annual report on market monitoring and performance, 2020. [Available Online (last accessed 06/2022)] http://www.caiso.com/Documents/2020-Annual-Report-on-Market-Issues-and-Performance.pdf
Y. Wang, Y. Dvorkin, R. Fernandez-Blanco, B. Xu, T. Qiu, D.S. Kirschen, Look-ahead bidding strategy for energy storage. IEEE Trans. Sustain. Energy 8, 1106–1117 (2017)
A. Akbari-Dibavar, K. Zare, S. Nojavan, A hybrid stochastic-robust optimization approach for energy storage arbitrage in day-ahead and real-time markets. Sustain. Cities Soc. 49, 101600 (2019)
Y. Ye, D. Papadaskalopoulos, J. Kazempour, G. Strbac, Incorporating non-convex operating characteristics into bi-level optimization electricity market models. IEEE Trans. Power Syst. 35, 163–176 (2019)
M. Khoshjahan, M. Moeini-Aghtaie, M. Fotuhi-Firuzabad, P. Dehghanian, H. Mazaheri, Advanced bidding strategy for participation of energy storage systems in joint energy and flexible ramping product market. IET Generat. Transmission Distrib. 14, 5202–5210 (2020)
California iso real-time dispatch multi-interval optimizatio, 2021. [Available Online (last accessed 06/2022)] http://www.caiso.com/Documents/EnergyStorageEnhancementsMIO-Presentation-Oct1_2021.pdf
Nyiso manual 12 transmission and dispatch operations manual, 2021. [Available Online (last accessed 06/2022)] https://www.nyiso.com/documents/20142/2923301/trans_disp.pdf/9d91ad95-0281-2b17-5573-f054f7169551
D.R. Jiang, W.B. Powell, Optimal hour-ahead bidding in the real-time electricity market with battery storage using approximate dynamic programming. INFORMS J. Comput. 27, 525–543 (2015)
J.D. Bishop, C.J. Axon, D. Bonilla, M. Tran, D. Banister, M.D. McCulloch, Evaluating the impact of v2g services on the degradation of batteries in phev and ev. Appl. Energy 111, 206–218 (2013)
P. Denholm, J. Nunemaker, P. Gagnon, W. Cole, The potential for battery energy storage to provide peaking capacity in the united states. Renew. Energy 151, 1269–1277 (2020)
M. Koller, T. Borsche, A. Ulbig, G. Andersson, Defining a degradation cost function for optimal control of a battery energy storage system, in IEEE Grenoble Conference. IEEE 2013, 1–6 (2013)
W.B. Powell, S. Meisel, Tutorial on stochastic optimization in energy-part ii: an energy storage illustration. IEEE Trans. Power Syst. 31, 1468–1475 (2015)
M. Ecker, N. Nieto, S. Käbitz, J. Schmalstieg, H. Blanke, A. Warnecke, D.U. Sauer, Calendar and cycle life study of li (nimnco) o2-based 18650 lithium-ion batteries. J. Power Sources 248, 839–851 (2014)
B. Xu, A. Oudalov, A. Ulbig, G. Andersson, D.S. Kirschen, Modeling of lithium-ion battery degradation for cell life assessment. IEEE Trans. Smart Grid 9, 1131–1140 (2016)
V. Muenzel, J. de Hoog, M. Brazil, A. Vishwanath, S. Kalyanaraman, A multi-factor battery cycle life prediction methodology for optimal battery management, in Proceedings of the 2015 ACM Sixth International Conference on Future Energy Systems, ACM, (2015), pp. 57–66
G. He, Q. Chen, C. Kang, P. Pinson, Q. Xia, Optimal bidding strategy of battery storage in power markets considering performance-based regulation and battery cycle life. IEEE Trans. Smart Grid 7, 2359–2367 (2015)
D. Fioriti, L. Pellegrino, G. Lutzemberger, E. Micolano, D. Poli, Optimal sizing of residential battery systems with multi-year dynamics and a novel rainflow-based model of storage degradation: an extensive italian case study. Electric Power Syst. Res. 203, 107675 (2022)
Y. Wang, Z. Zhou, A. Botterud, K. Zhang, Q. Ding, Stochastic coordinated operation of wind and battery energy storage system considering battery degradation. J. Modern Power Syst. Clean Energy 4, 581–592 (2016)
B. Zhou, X. Liu, Y. Cao, C. Li, C.Y. Chung, K.W. Chan, Optimal scheduling of virtual power plant with battery degradation cost. IET Gener. Trans. Distrib. 10, 712–725 (2016)
K. Ginigeme, Z. Wang, Distributed optimal vehicle-to-grid approaches with consideration of battery degradation cost under real-time pricing. IEEE Access 8, 5225–5235 (2020)
C. Bordin, H.O. Anuta, A. Crossland, I.L. Gutierrez, C.J. Dent, D. Vigo, A linear programming approach for battery degradation analysis and optimization in offgrid power systems with solar energy integration. Renew. Energy 101, 417–430 (2017)
B. Xu, M. Korpås, A. Botterud, Operational valuation of energy storage under multi-stage price uncertainties, in 2020 59th IEEE Conference on Decision and Control (CDC), IEEE, (2020), pp. 55–60
G. He, Q. Chen, P. Moutis, S. Kar, J.F. Whitacre, An intertemporal decision framework for electrochemical energy storage management. Nat. Energy 3, 404–412 (2018)
B. Xu, Dynamic valuation of battery lifetime, IEEE Trans. Power Syst. (2021)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
Employments: The author was employed at Columbia University: The authors have no relevant financial or non-financial interests to disclose. The authors have no conflicts of interest to declare that are relevant to the content of this article. All authors certify that they have no affiliations with or involvement in any organization or entity with any financial interest or non-financial interest in the subject matter or materials discussed in this manuscript. The authors have no financial or proprietary interests in any material discussed in this article.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Xu, B. The role of modeling battery degradation in bulk power system optimizations. MRS Energy & Sustainability 9, 198–211 (2022). https://doi.org/10.1557/s43581-022-00047-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1557/s43581-022-00047-7