
Abstract
In this paper, we provide a new type of study approach for the two-dimensional (2D) Sobolev equations. We first establish a semi-discrete Crank-Nicolson (CN) formulation with second-order accuracy about time for the 2D Sobolev equations. Then we directly establish a fully discrete CN finite volume element (CNFVE) formulation from the semi-discrete CN formulation about time and provide the error estimates for the fully discrete CNFVE solutions. Finally, we provide a numerical example to verify the correction of theoretical conclusions. Further, it is shown that the fully discrete CNFVE formulation is better than the fully discrete FVE formulation with first-order accuracy in time.
Similar content being viewed by others

1 Introduction
The finite volume element (FVE) method (see [1, 2]) is a very effective discretization tool for the two-dimensional (2D) Sobolev equations. Compared to finite element (FE) (see [3, 4]) and finite difference schemes (see [5]), the FVE method is very much easier to implement and provides flexibility in handling complicated computational domains. Especially, the FVE method can ensure local mass conservation and a highly desirable property in many real-life applications. Thus, it is considered as the preferred numerical approach. It is also known as a generalized difference method (see [6, 7]) or a box method (see [8, 9]). It has been widely used in real-life numerical computations (see, e.g., [1, 2, 6–17]).
A semi-discrete FVE formulation with respect to spatial variables (see [18]) and a fully discrete FVE formulation with the first-order accuracy in time (see [19]) for the 2D Sobolev equations have also been posed. However, to the best of our knowledge, there is not any paper about the Crank-Nicolson (CN) FVE (CNFVE) method and the error analysis for the 2D Sobolev equations. Therefore, in this paper, we establish a fully discrete CNFVE formulation with the second-order accuracy in time for the 2D Sobolev equations and provide the error estimates of the fully discrete CNFVE solutions.
The procedure that we here establish the fully discrete CNFVE formulation is different from the classical FVE methods. The classical FVE methods were first to establish the semi-discrete FVE formulations with respect to spatial variables, and, then, to build the fully discrete FVE formulations. Whereas the fully discrete CNFVE formulation here is directly established from the semi-discrete CN formulation about time, which avoids the semi-discrete FVE formulation with respect to spatial variables, such that the procedure of theoretical analysis for the fully discrete CNFVE formulation becomes simpler and more convenient than the classical FVE methods, which is a new type of study approach for the 2D Sobolev equations.
In addition, because the 2D Sobolev equations do not only include the first-order derivative in time but also contain the mixed derivatives of the first-order derivative in time and the second-order in spatial variables (see the term \(\Delta u_{t}\) for Problem I in Section 2), so the theoretical study of the fully discrete CNFVE formulation for the 2D Sobolev equations requires more technique than that for the 2D parabolic problems in [1, 6, 11], but the Sobolev equations are more useful than parabolic problems.
The outline of the paper is as follows. In Section 2, we establish the semi-discrete CN formulation about time for the 2D Sobolev equations and provide the error estimates of solutions for the formulation. In Section 3, we directly establish the fully discrete CNFVE formulation from the semi-discrete CN formulation about time and analyze the errors of the CNFVE solutions, where the error estimates obtained here are optimal, well-rounded, and very beautiful. In Section 4, we provide a numerical example to verify that the numerical results are consistent with theoretical conclusions. Further, it is shown that the fully discrete CNFVE formulation is better than the fully discrete FVE formulation with the first-order accuracy in time (see [19]). Section 5 provides main conclusions and future tentative ideas.
2 Semi-discrete CN formulation with second-order accuracy about time and error estimates
Let \(\Omega\subset{R}^{2}\) be a bounded domain with piecewise smooth boundary ∂Ω and consider the following initial boundary value problems of the 2D Sobolev equations in \(\overline{\Omega}\times[0, T]\).
Problem I
Seek u such that
where \(u_{t}={\partial u}/{\partial t}\), ε and γ are two positive constants, the source term \(f(x,y,t)\), the boundary value function \(\psi(x,y,t)\), and the initial value function \(\varphi _{0}(x, y)\) are sufficiently smooth to ensure the following theoretical analysis validity, and T is the total time. For the sake of convenience and without loss of generality, we may as well suppose that \(\psi(x,y,t)\) is a zero function in the following theoretical analysis.
The Sobolev equations possess the important physical background. They are used to describe the fluid flow penetrating rocks, soils, or different viscous media (see [20–22]). They have widely been used in many real-life engineering fields.
The Sobolev spaces and their norms used in this context are standard [23]. Let \(U=H_{0}^{1}(\Omega)\). Then the variational formulation for Problem I can be stated as follows.
Problem II
Seek \(u(t):[0, T]\rightarrow U\) such that
where \(a(u,w)=(\nabla u,\nabla w)\) and \((\cdot,\cdot)\) represents the inner product in \(L^{2}(\Omega)\).
It is well known that Problem II has a unique solution that satisfies the following estimate (see [20–22]):
where \(\|\cdot\|_{H^{m}(H^{l})}\) is the normal in Sobolev space \(H^{m}(0,T;H^{l}(\Omega))\), \(C=\sqrt{2/\min\{1,2\varepsilon,\gamma\}}\).
For the positive integer N, we denote the time step increment by \(k=T/N\) and put \(u^{n}=u(x,y,t_{n})\) (\(t_{n}=nk\), \(0\le n\le N\)) and \(\bar {u}^{n}=(u^{n}+u^{n-1})/2\). If the derivative \(u_{t}\) of u at \(t=t_{n}\) about time is approximated by the difference \(\bar{\partial}_{t}u^{n}=( u^{n}- u^{n-1})/ k\), then the semi-discrete CN formulation with respect to time for Problem II is stated as follows.
Problem III
Seek \(u^{n}\in U\) such that
Note that the norm \(\|\cdot\|_{1}\) is equivalent to the semi-norm \(\| \nabla(\cdot)\|_{0}\) in \(H_{0}^{1}(\Omega)\), i.e., there are two constants \(C_{1}\) and \(C_{2}\) such that (see, e.g., [3, 4, 6])
For the semi-discrete CN formulation, we have the following results.
Theorem 1
Problem III has a unique series of solutions \(u^{n}\in U\) (\(n=1, 2, \ldots, N\)), and if \(f\in W^{2,\infty}(0,T; L^{2}(\Omega))\), we have the following error estimates:
where \(\tilde{C}= [{C_{2}^{2}}/{(228\gamma)}+{\varepsilon ^{2}}/{(114\gamma)}+{\gamma}/{16} ]^{1/2}/\min\{1,\sqrt {\varepsilon}\}\).
Proof
Put \(A(u,v)=2(u,v)+2\varepsilon a(u,v)+k\gamma a(u,v)\), \(F(v)=2k(f(t_{n-\frac{1}{2}}),v)+2(u^{n-1},v) +2\varepsilon a(u^{n-1}, v)-k\gamma a(u^{n-1},v)\). Then Problem III is equivalently restated as follows:
Since \(A(u,u)=2\|u\|_{0}^{2}+2\varepsilon\|\nabla u\|_{0}^{2}+k\gamma\|\nabla u\|_{0}^{2}\ge2\|u\|_{0}^{2}+2\varepsilon\|\nabla u\|_{0}^{2}\ge\alpha\|u\|_{1}^{2}\) (where \(\alpha=\min\{2,2\varepsilon\}\)), \(A(u,v)\) is a positive definite bilinear function in \(H_{0}^{1}(\Omega)\times H_{0}^{1}(\Omega)\). It is evident that \(A(u,v)\) is continuous in \(H_{0}^{1}(\Omega)\times H_{0}^{1}(\Omega)\) and \(F(v)\) is also a continuous linear function in \(H_{0}^{1}(\Omega)\) for given \(u^{n-1}\). Thus, by means of the Lax-Milgram theorem (see [3] or [4]), we deduce that variational equation (2.4), i.e., Problem III has a unique series of solutions \(u^{n}\in U\) (\(n=1, 2, \ldots, N\)).
By taking \(t=t_{n-\frac{1}{2}}\) in Problem II, we have
By using a Taylor expansion, we obtain
By using the Newton remainder term and by subtracting (2.7) from (2.6), we obtain
where \(\xi_{1n}\in[t_{n-1},t_{n}]\) and \(\xi_{2n}\in[t_{n-1},t_{n}]\). By using the Newton remainder term again and by adding (2.6) to (2.7), we obtain
where \(\xi_{3n}\in[t_{n-1},t_{n}]\) and \(\xi_{3n}\in[t_{n-1},t_{n}]\). With (2.8) and (2.9), from (2.5), we obtain the following equivalent form:
Let \(e_{n}=u(t_{n})-u^{n}\). By subtracting (2.2) from (2.10), we obtain
By taking \(v=e_{n}+e_{n-1}\) in (2.11) and by using the Hölder and Cauchy inequalities, we obtain
It follows from (2.12) that
Note that \(e_{0}=0\). By summing from 1 to n for (2.13), we obtain
Thus, it follows from (2.14) that
where \(\tilde{C}= [{C_{2}^{2}}/{(526\gamma)}+{\varepsilon ^{2}}/{(228\gamma)}+{\gamma}/{32} ]^{1/2}/\min\{1,\sqrt {\varepsilon}\}\), which gets (2.3) and completes the proof of Theorem 1. □
3 Fully discrete CNFVE formulation and error estimate
In this section, we will directly establish the fully discrete CNFVE formulation from the time semi-discrete CN formulation for the 2D Sobolev equations and analyze the errors of the fully discrete CNFVE solutions. To this end, it is necessary to adopt an FVE approximation for the spatial variables of Problem III.
Let \(\Im_{h} = \{K\}\) be the quasi-uniform triangulation of Ω (see [3] or [4]) and \(\Im_{h}^{*}\) the dual partition based on \(\Im_{h}\). The elements in \(\Im_{h}^{*}\), called the control volumes, are formed by means of the same technique as that in [6]. Denote the barycenter of \(K\in\Im_{h}\) by \(\mathbf{z}_{K}\). By connecting \(\mathbf{z}_{K}\) with line segments to the midpoints of the edges of K, we divide it into three quadrilaterals \(K_{z}\) (\(\mathbf{z}=(x_{z},y_{z})\in Z_{h}(K)\), where \(Z_{h}(K)\) represents a set of the vertices of K). Then the control volume \(V_{z}\) is constituted by the sub-regions \(K_{z}\) of the sharing vertex \(\mathbf{z}\in Z_{h}=\bigcup_{K\in \Im_{h}}Z_{h}(K)\) (see Figure 1). Thus, all control volumes covering the domain Ω form the dual partition \(\Im_{h}^{*}\) based on \(\Im_{h}\). \(Z^{\circ}_{h}\) represents the set of interior vertices in \(Z_{h}\).

Triangle element and control volume. The left chart is a triangle K partitioned into three sub-regions \(K_{z}\). The right chart is a sample region with dotted lines indicating the corresponding control volume \(V_{z}\).
The trial function space \(U_{h}\) and test space \(\tilde{U}_{h}\) are defined as follows, respectively:
where \(\mathcal{ P}_{l}(e)\) (\(l=0,1\) and \(e=K\) or \(V_{z}\)) are lth polynomial spaces on e.
It is obvious that \(U_{h}\subset U\) and the test space \(\tilde{U}_{h}\) is spanned by the following basis functions:
For \(w\in U\), let \(\Pi_{h}w\) be the interpolation operator of w onto \(U_{h}\). By the interpolation theory of Sobolev spaces (see [3, 4, 6]), we have
where C in this context denotes a positive constant which is possibly different at various positions, being independent of h and k.
For \(w\in U\), let \(\Pi_{h}^{*}w\) be the interpolation operator of w onto the test space \(\tilde{U}_{h}\), i.e.,
By the interpolation theory (see [3, 4, 6]), we have
Further, the interpolation operator \(\Pi_{h}^{*}\) satisfies the following properties (see [6, 14, 15]).
Lemma 2
If \(v_{h}\in U_{h}\), then
Let
where \(\tilde{a}(u_{h},\phi_{z})=\int_{\partial V_{z}} (\frac {\partial u_{h}}{\partial x}\,\mathrm{d}y-\frac{\partial u_{h}}{\partial y}\,\mathrm{d}x )\) and \(\mathbf{z}=(x_{z},y_{z})\).
The following two lemmas are known (see [6, 14]).
Lemma 3
The bilinear form \(a(u_{h},\Pi^{*}_{h}v_{h})\) is symmetric, bounded, and positive definite, i.e.,
and there exist two positive constants \(C_{3}\) and \(C_{4}\) such that
Lemma 4
The following formula holds:
If \(u\in H^{m}(\Omega)^{2}\) (\(m = 0, 1\)) and \(v_{h}\in U_{h}\), the following error estimates hold:
Put \(|\!|\!|u_{h}|\!|\!|_{0}=( u_{h},\Pi_{h}^{*}{ u}_{h})^{1/2}\). Then \(|\!|\!|\cdot|\!|\!|_{0}\) is equivalent to \(\|\cdot\|_{0}\) on \(U_{h}\), i.e., there exist two positive constants \(C_{5}\) and \(C_{6}\) that satisfy
For given solutions \(u\in U\), define a generalized Ritz projection \(R_{h}: U\to U_{h}\) such that
Thus, from standard FE method (see, e.g., [3] or [4]), we have the following results.
Lemma 5
The generalized projection \(R_{h}: U\to U_{h}\) satisfies
If \(u\in H^{2}(\Omega)\), we have
The following discrete Gronwall lemma is known (see [4]) and will be used in the next analysis.
Lemma 6
(Discrete Gronwall lemma)
If \(\{a_{n}\}\), \(\{b_{n}\}\), and \(\{c_{n}\}\) are three positive sequences, and \(\{c_{n}\}\) is monotone that satisfy \(a_{0}+b_{0}\le c_{0}\) and \(a_{n}+b_{n}\le c_{n}+\bar{\lambda}\sum_{i=0}^{n-1}a_{i}\) (\(n=1,2, \ldots\) , \(\bar{\lambda}>0\)), then \(a_{n}+b_{n}\le c_{n}\exp(n\bar{\lambda})\) (\(n=0, 1, 2,\ldots\)).
Thus, the fully discrete CNFVE formulation with the second-order accuracy for the 2D Sobolev equations is stated as follows.
Problem IV
Seek \(u_{h}^{n}\in U_{h}\) such that
We have the following main result for Problem IV.
Theorem 7
Under the hypotheses of Theorem 1, if \(\varphi_{0}\in H^{1}(\Omega)\), then Problem IV has a unique series of solution \(u_{h}^{n}\in U_{h}\) that satisfies
And if \(f\in W^{1,\infty}(0,T;H^{1}(\Omega))\), \(\varphi_{0}\in H^{2}(\Omega)\), and \(k=O(h)\), then the errors between the solution \(u(t)\) to Problem II and the solutions \(u^{n}_{h}\) to Problem IV are as follows:
Proof
Let \(A(u,v)=2(u,\Pi_{h}^{*}v) +2\varepsilon a(u,v) +k\gamma a(u,v)\) and \(F(v)=2k(f(t_{n-\frac{1}{2}}),\Pi_{h}^{*}v)+2(u_{h}^{n-1}, \Pi_{h}^{*}v)+ 2\varepsilon a(u_{h}^{n-1},v)-k\gamma a(u_{h}^{n-1},v)\). Then Problem IV may be equivalently restated as follows:
From Lemma 4, we have \(A(u,u)=2|\!|\!|u|\!|\!|_{0}^{2}+2\varepsilon\|\nabla u\| _{0}^{2}+k\gamma\|\nabla u\|_{0}^{2}\ge2C_{5}\|u\|_{0}^{2}+2\varepsilon\|\nabla u\| _{0}^{2}\ge\alpha\|u\|_{1}^{2}\) (where \(\alpha=\min\{2C_{5},2\varepsilon\}\)). Thus, \(A(u,v)\) is a positive definite bilinear function on \(U_{h}\times U_{h}\). It is evident that \(A(u,v)\) is a continuous bilinear function on \(U_{h}\times U_{h}\) and \(F(v)\) is a continuous linear function on \(U_{h}\) for fixed \(u_{h}^{n-1}\). Thus, by the Lax-Milgram theorem (see [3] or [4]), we deduce that the system of equation (3.12), i.e., Problem IV has a unique series of solutions \(u_{h}^{n}\in U_{h}\) (\(n=1,2,\ldots,N\)).
By taking \(v_{h}=u_{h}^{n}+u_{h}^{n-1}\) in Problem IV, we have
Note that \(|\!|\!|u_{h}^{n}+u_{h}^{n-1}|\!|\!|_{0}\le C\|\nabla (u_{h}^{n} + u_{h}^{n-1})\|_{0}\le C(\|\nabla u_{h}^{n}\|_{0} +\|\nabla u_{h}^{n-1}\|_{0})\). From (3.13) we have
By summing from 1 to n for (3.14), we obtain
By using Lemma 4, from (3.15), we obtain (3.10).
By subtracting Problem IV from Problem III by taking \(v=v_{h}\in U_{h}\subset U\), we obtain the following error equations:
It follows from (3.6) and (3.16) that
By using (3.6) and the Hölder and Cauchy inequalities, we have
If \(k=O(h)\), with Lemma 4, and Taylor’s formula, we have
By combining (3.18) to (3.22) with (3.17), we obtain
By summing from 1 to n for (3.23) and using Lemma 5, we obtain
If k is sufficiently small such that \(Ck\le1/2\), it follows from (3.24) that
Thus, by using Lemmas 5 and 6, from (3.25) we obtain
Further, it follows from (3.26) that
Combining (3.27) with Lemma 5 and Theorem 1 yields (3.11) which complete the proof of Theorem 7. □
Remark 1
The error estimates of Theorem 7 are optimal order, well-rounded, and very beautiful.
4 A numerical example
In this section, we provide a numerical example of the 2D Sobolev equations to illustrate that the numerical results are consistent with theoretical conclusions. Further, it is shown that the fully discrete CNFVE formulation is better than the fully discrete FVE formulation with the first-order accuracy in [19], thus validating the feasibility and efficiency of the fully discrete CNFVE formulation.
We choose the computational domain as \(\overline{\Omega}=[0, 2]\times [0,2]\). We take \(\varepsilon=1/(20\pi^{2})\), \(\gamma=1/(2\pi^{2})\), the initial value function \(\varphi_{0}(x,y)=\sin\pi x\sin\pi y\), the boundary value function \(\psi(x,y,t)=0\), and the source term \(f(x,y,t)=12\sin\pi x\sin\pi y\exp(10t)\).
We first divide the Ω̅ into the right triangle element with diameter \(h=\sqrt{2}\times10^{-2}\), which constitutes a triangularization \(\Im_{h}\) with the number of node \(N_{h}=4\times 10^{4}\). The dual decomposition \(\Im^{*}_{h}\) consists of barycenter dual decomposition, i.e., the barycenter of the right triangle \(K\in\Im_{h}\) acted as the node of the dual decomposition. In order to satisfy the condition \(k=O(h)\) in Theorem 7, we choose the time step increment as \(k=10^{-2}~\mbox{s}\) (second).
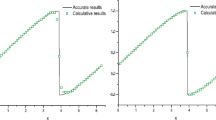
When we adopt the fully discrete CNFVE formulation to solve the 2D Sobolev equations at \(t=2~\mbox{s}\), as soon as we perform 200 steps, we can obtain the numerical solution with accuracy 10−4 with respect to the norm \(\|\cdot\|_{1}\) in \(H_{0}^{1}(\Omega)\) (see Figure 2) such that the accumulation of truncation errors in the computational process is very slow (see the dotted line of Figure 4).

CNFVE solution with the second-order accuracy when \(\pmb{t=2~\mbox{s}}\) .
If one adopts the following fully discrete FVE formulation (see [19]):
Problem V
Seek \(u_{h}^{n}\in U_{h}\) such that
to find the solution for the 2D Sobolev equations, the error estimates between the accuracy solution and the fully discrete FVE solutions only have the first-order accuracy in time as follows (see [19]):
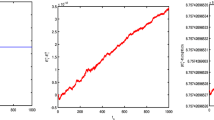
Thus, in order to obtain the same computational accuracy as the fully discrete CNFVE formulation with the second-order accuracy, the time step increment and spatial step increment for Problem V have to choose as \(h=O(k)=O(10^{-4})\) such that the number of node is \(N_{h}=4\times 10^{8}\). When one uses the fully discrete FVE formulation with the first-order accuracy to find the solution for the 2D Sobolev equations at \(t=2~\mbox{s}\) which is depicted graphically on the chart in Figure 3, he needs to perform 20,000 steps so that the accumulation of its truncation errors in the computational process increases very quick (see the solid line in Figure 4) and is far greater that those of the fully discrete CNFVE formulation with the second-order accuracy. It is shown that the errors of the second-order accuracy CNFVE solutions are far smaller than those of the first-order accuracy FVE solutions because the accumulation of truncation errors for the fully discrete CNFVE formulation is far slower than that for the fully discrete FVE formulation with the first-order accuracy (see Figure 4). Further, it is shown that the fully discrete CNFVE formulation with the second-order accuracy to solve the 2D Sobolev equation is computationally very effective and the numerical results are consistent with theoretical those because the theoretical and numerical errors all are \(O(10^{-4})\) with respect to the norm \(\|\cdot\|_{1}\) in \(H_{0}^{1}(\Omega)\). Therefore, the fully discrete CNFVE formulation is far better than the fully discrete FVE formulation with the first-order accuracy in time in [19]. In addition, the study approaches here are simpler and more convenient than those of the classical fully discrete FVE methods (see, e.g., [6, 13]) due to avoiding the semi-discrete FVE formulation with respect to space variables.

FVE solution with the first-order accuracy when \(\pmb{t=2~\mbox{s}}\) .

Compare errors of the CNFVE solutions with the FVE solutions with the first-order accuracy when \(\pmb{0\le t\le 2~\mbox{s}}\) .
5 Conclusions and perspective
In this paper, we have directly established the fully discrete CNFVE formulation with the second-order accuracy for 2D Sobolev equations from the semi-discrete CN formulation with second-order accuracy about time, analyzed the errors between the accurate solution and the fully discrete CNFVE solutions, and we provided a numerical example validating the advantage of the fully discrete CNFVE formulation. It is shown that the fully discrete CNFVE formulation is far better than the fully discrete FVE formulation with the first-order accuracy in time.
Future research work in this area will aim at extending the fully discrete CNFVE formulation to some real-life Sobolev equations and to a set of more complicated PDEs such as the atmosphere quality forecast system and the ocean fluid forecast system.
References
Cai, Z, McCormick, S: On the accuracy of the finite volume element method for diffusion equations on composite grid. SIAM J. Numer. Anal. 27(3), 636-655 (1990)
Süli, E: Convergence of finite volume schemes for Poisson’s equation on nonuniform meshes. SIAM J. Numer. Anal. 28(5), 1419-1430 (1991)
Ciarlet, PG: The Finite Element Method for Elliptic Problems. North-Holland, Amsterdam (1978)
Luo, ZD: Mixed Finite Element Methods and Applications. Chinese Science Press, Beijing (2006)
Chung, T: Computational Fluid Dynamics. Cambridge University Press, Cambridge (2002)
Li, RH, Chen, ZY, Wu, W: Generalized Difference Methods for Differential Equations: Numerical Analysis of Finite Volume Methods. Monographs and Textbooks in Pure and Applied Mathematics, vol. 226. Dekker, New York (2000)
Li, Y, Li, RH: Generalized difference methods on arbitrary quadrilateral networks. J. Comput. Math. 17, 653-672 (1999)
Bank, RE, Rose, DJ: Some error estimates for the box methods. SIAM J. Numer. Anal. 24(4), 777-787 (1987)
Jones, WP, Menziest, KR: Analysis of the cell-centred finite volume method for the diffusion equation. J. Comput. Phys. 165, 45-68 (2000)
Blanc, P, Eymerd, R, Herbin, R: An error estimate for finite volume methods for the Stokes equations on equilateral triangular meshes. Numer. Methods Partial Differ. Equ. 20, 907-918 (2004)
Chatzipantelidis, P, Lazarrov, RD, Thomée, V: Error estimates for a finite volume element method for parabolic equations in convex in polygonal domains. Numer. Methods Partial Differ. Equ. 20, 650-674 (2004)
Chou, SH, Kwak, DY: A covolume method based on rotated bilinears for the generalized Stokes problem. SIAM J. Numer. Anal. 35, 494-507 (1998)
Li, HR: A fully discrete generalized difference formulation and numerical simulation for unsaturated water flow. J. Syst. Sci. Math. Sci. 30(9), 1163-1174 (2010)
Li, J, Chen, ZX: A new stabilized finite volume method for the stationary Stokes equations. Adv. Comput. Math. 30, 141-152 (2009)
Shen, LH, Li, J, Chen, ZX: Analysis of a stabilized finite volume method for the transient stationary Stokes equations. Int. J. Numer. Anal. Model. 6(3), 505-519 (2009)
Yang, M, Song, HL: A postprocessing finite volume method for time-dependent Stokes equations. Appl. Numer. Math. 59, 1922-1932 (2009)
Ye, X: On the relation between finite volume and finite element methods applied to the Stokes equations. Numer. Methods Partial Differ. Equ. 17, 440-453 (2001)
Cao, YH: The generalized difference scheme for linear Sobolev equation in two dimensions. Math. Numer. Sin. 27(3), 243-256 (2005)
Li, H, Luo, ZD, An, J, Sun, P: A fully discrete finite volume element formulation for Sobolev equation and numerical simulation. Math. Numer. Sin. 34(2), 163-172 (2012)
Barenblett, GI, Zheltov, IP, Kochina, IN: Basic concepts in the theory of homogeneous liquids in fissured rocks. J. Appl. Math. Mech. 24(5), 1286-1303 (1990)
Shi, DM: On the initial boundary value problem of nonlinear the equation of the moisture in soil. Acta Math. Appl. Sin. 13(1), 33-40 (1990)
Ting, TW: A cooling process according to two-temperature theory of heat conduction. J. Math. Anal. Appl. 45(1), 23-31 (1974)
Adams, RA: Sobolev Spaces. Academic Press, New York (1975)
Acknowledgements
This research was supported by National Science Foundation of China grant 11271127.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The author declares that they have no competing interests.
Author’s contributions
The author wrote, read, and approved the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Luo, Z. A Crank-Nicolson finite volume element method for two-dimensional Sobolev equations. J Inequal Appl 2016, 188 (2016). https://doi.org/10.1186/s13660-016-1131-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13660-016-1131-z