
Abstract
Consider the first-order linear differential equation with several retarded arguments
where the functions for every , for and . A survey on the oscillation of all solutions to this equation is presented in the case of several non-monotone arguments and especially when well-known oscillation conditions are not satisfied. Examples illustrating the results are given.
MSC:34K11, 34K06.
Similar content being viewed by others

1 Introduction
Consider the differential equation with several non-monotone retarded arguments
where the functions for every (here ), for and .
Let , and . By a solution of equation (1.1), we understand a function continuously differentiable on that satisfies (1.1) for . Such a solution is called oscillatory if it has arbitrarily large zeros, and otherwise it is called non-oscillatory.
In the special case where , equation (1.1) reduces to the equation
where the functions , for and .
For the general theory of these equations, the reader is referred to [1–4].
In this paper we present a survey on the oscillation of all solutions to these equations in the case of several non-monotone arguments and especially when the well-known oscillation conditions
for equation (1.2) are not satisfied.
2 Oscillation criteria for equation (1.2)
In this section we study the delay equation
where the functions , for and .
The problem of establishing sufficient conditions for the oscillation of all solutions to the differential equation (1.2) has been the subject of many investigations. See, for example, [1, 5–26] and the references cited therein.
The first systematic study for the oscillation of all solutions to equation (1.2) was made by Myshkis. In 1950 [20] he proved that every solution of equation (1.2) oscillates if
In 1972, Ladas et al. [27] proved that the same conclusion holds if in addition τ is a non-decreasing function and
() .
In 1979, Ladas [17] established integral conditions for the oscillation of equation (1.2) with constant delay, while in 1982, Koplatadze and Chanturija [14] established the following result. If
() ,
then all solutions of equation (1.2) oscillate; if
() ,
then equation (1.2) has a non-oscillatory solution.
It is obvious that there is a gap between conditions () and () when the limit does not exist. How to fill this gap is an interesting problem which has been recently investigated by several authors.
In 1988, Erbe and Zhang [10] developed new oscillation criteria by employing the upper bound of the ratio for possible non-oscillatory solutions of equation (1.2). Their result says that all the solutions of equation (1.2) are oscillatory if and
() .
Since then several authors tried to obtain better results by improving the upper bound for .
In 1991, Jian [12] derived the condition
() ,
while in 1992, Yu et al. [25] obtained the condition
() .
In 1990, Elbert and Stavroulakis [8] and in 1991 Kwong [16], using different techniques, improved (), in the case where , to the conditions
()
and
() ,
respectively, where is the smaller real root of the equation .
In 1998, Philos and Sficas [21] and in 1999, Zhou and Yu [26] and Jaroš and Stavroulakis [11] derived the conditions
() ,
() ,
and
() ,
respectively.
Consider equation (1.2) and assume that is continuously differentiable and that there exists such that eventually for all t. Under this additional assumption, in 2000, Kon et al. [13] and in 2003, Sficas and Stavroulakis [22] established the conditions
() ,
and
() ,
respectively. In the case where , then , and () leads to
It is to be noted that for small values of (), all previous conditions ()-() reduce to condition (), i.e., . However, condition () leads to
which is an essential improvement. Moreover, () improves all the above conditions for all values of . Note that the value of the lower bound on A cannot be less than . Thus, the aim is to establish a condition which leads to a value as close as possible to .
For illustrative purpose, we give the values of the lower bound on A under these conditions when (i) and (ii) .
We see that condition () essentially improves all the known results in the literature.
Moreover, it should be pointed out that in 1994, Koplatadze and Kvinikadze [15] improved () as follows: Assume
Clearly is non-decreasing and for all . Define
Then the following theorem was established in [15].
Theorem 2.1 ([15])
Let exist such that
where σ, , are defined by (2.2), (2.4), (), respectively, and
Then all solutions of equation (1.2) oscillate.
Concerning the constants 1 and which appear in conditions (), () and (), in 2011, Berezansky and Braverman [6] established the following theorem.
Theorem 2.2 ([6])
For any , there exists a non-oscillatory equation
with such that
Also in 2011, Braverman and Karpuz [7] investigated equation (1.2) in the case of a general argument (τ is not assumed monotone) and proved the following.
Theorem 2.3 ([7])
There is no constant such that
implies oscillation of equation (1.2) for arbitrary (not necessarily non-decreasing) argument .
Remark 2.1 Observe that, because of condition (), the constant K in (2.4) makes sense for .
Moreover, in [7] the following result was established.
Theorem 2.4 ([7])
Assume that
where is defined by (2.1). Then all solutions of equation (1.2) oscillate.
Observe that condition (2.5) improves ().
Using the upper bound of the ratio for possible non-oscillatory solutions of equation (1.2), presented in [8, 11, 13, 22], the above result was recently essentially improved in [23].
Theorem 2.5 ([23])
Assume that and
where is defined by (2.1). Then all solutions of equation (1.2) oscillate.
Remark 2.2 ([23])
Observe that as , then condition (2.6) reduces to (2.5). However, the improvement is clear as . Actually, when , the value of the lower bound on B is equal to ≈0.863457014. That is, (2.6) essentially improves (2.5).
Remark 2.3 ([23])
Note that, under the additional assumption that is continuously differentiable and that there exists such that eventually for all t (see [13, 22]) condition (2.6) of Theorem 2.5 reduces to

where M is given by
and λ is the smaller root of the equation . When , then from [22] it follows that
and in the case that , then and (2.6′) leads to
That is, condition (2.6′) essentially improves (2.6) but of course under the additional (stronger) assumptions on and .
The following example illustrates the significance of Theorem 2.5.
Consider the equation
where , and
We see that
Observe that
Moreover, for , we have
That is, conditions (), () and (2.5) are not satisfied. Observe, however, that for ,
and from (2.10) we see that
that is, the conditions of Theorem 2.5 are satisfied and therefore all the solutions of equation (2.7) with the general argument (2.8) are oscillatory.
3 Oscillation criteria for equation (1.1)
For equation (1.1) with several arguments, the following results have been established.
In 1982, Ladas and Stavroulakis [28] (see also in 1984, Arino et al. [5]) studied the equation with several constant retarded arguments of the form

under the assumption that , , and proved that each one of the following conditions
or
implies that all solutions of equation (1.1′) oscillate. Later in 1996, Li [19] proved that the same conclusion holds if
In 1984, Hunt and Yorke [29], considered the equation with variable coefficients of the form

under the assumption that there is a uniform upper bound on the ’s and proved that if
then all solutions of equation (1.1″) oscillate.
In 1984, Fukagai and Kusano [30], for equation (1.1), established the following theorem.
Theorem 3.1 ([[30], Theorem 1′(i)])
Consider equation (1.1) and assume that there is a continuous non-decreasing function such that for , . If
then all solutions of equation (1.1) oscillate. If, on the other hand, there exists a continuous non-decreasing function such that for , , and
then equation (1.1) has a non-oscillatory solution.
In 2000, Grammatikopoulos et al. [31] improved the above results as follows.
Theorem 3.2 ([[31], Theorem 2.6])
Assume that the functions are non-decreasing for all ,
and
If
then all solutions of equation (1.1) oscillate.
Observe that all the above mentioned oscillation conditions (3.1)-(3.7) involve lim inf only and coincide with condition () in the case of equation (1.2). It is obvious that there is a gap between conditions () and () when the limit does not exist. Moreover, in view of Theorem 2.3, it is an interesting problem to investigate equation (1.1) with non-monotone arguments and derive sufficient oscillation conditions, involving lim sup (as condition () for equation (1.2) with one argument), which is the main objective in the following.
Theorem 3.3 ([32])
Assume that there exist non-decreasing functions such that
and
Then all solutions of equation (1.1) oscillate.
When , that is, in the case of equation (1.2) with one argument, from Theorem 3.3 we have the following corollary.
Corollary 3.1 ([32])
Let
Then all solutions of equation (1.2) oscillate.
In the case of monotone arguments we have the following.
Theorem 3.4 ([32])
Let be non-decreasing functions and
Then all solutions of equation (1.1) oscillate.
Corollary 3.2 ([32])
Let be non-decreasing functions and
then all solutions of equation (1.1) oscillate.
Corollary 3.3 ([32])
Let be non-decreasing functions, () and
then all solutions of equation (1.1) oscillate.
Corollary 3.4 ([32])
Let be non-decreasing functions, and
then all solutions of equation (1.1) oscillate.
Remark 3.1 It should be pointed out that condition (3.9) of Theorem 3.3 presents for the first time sufficient conditions (in terms of lim sup) for the oscillation of all solutions to equation (1.1) with several non-monotone arguments. They are also independent and essentially improve all the related oscillation conditions in the literature. Even in the case where , the improvement is substantial. Observe that (3.10) essentially improves (2.5).
Remark 3.2 Observe that when , the above condition (3.11) [(3.12)] reduces to the (classical) condition ().
The following examples illustrate the significance of our results.
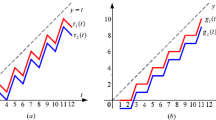
We consider a generalization of an example presented in [7], where the equation
with the retarded argument
was studied. Here we discuss the more general equation
and illustrate how our methodology can be utilized to prove the existence of oscillatory solutions for some range of the parameter p. In this case, as in [7], one may choose the function
Now note that, since ,
The choice as in [6] of gives
The inequality
is satisfied for (the numbers that follow are rounded to the third decimal place unless exact) . Thus, for , condition (3.10) of Corollary 3.1 is satisfied, and therefore all solutions to the above equation (3.14) oscillate. Observe, however, that when in (3.14), we find
and
That is, none of the known oscillation conditions (), () (and also conditions (2.5), (3.1)-(3.6)) is satisfied.
Remark 3.3 ([32])
It is obvious that if for some all solutions of the equation
oscillate, then all solutions of equation (1.1) also oscillate.
Example 3.2 ([32])
Let and consider the sequences such that for , (), where . Choose p, and such that
and
Let for () and for .
According to (3.15), it is obvious that condition (3.13) is fulfilled, where and () a.e., and therefore all solutions to equation (1.1) are oscillatory. However, for the equations
by (3.16), we have
and
Remark 3.4 ([32])
In the above mentioned Example 3.2, by a solution we mean an absolutely continuous function which satisfies the corresponding equation almost everywhere.
Example 3.3 ([32])
Consider the equation
where
We can take
Note that, since and , we have
Set . The choice of gives
Let . Then, by direct computation, we get
if . That is, when and in equation (3.17), condition (3.9) of Theorem 3.3 is satisfied, and therefore all solutions to this equation oscillate.
Note that since the delays are not monotone, Theorem 3.2 cannot be applied to this example. We now compare our result with Theorem 3.1. Note that
The choice , gives
that is, condition (3.6) is not satisfied.
References
Erbe LH, Kong Q, Zhang BG: Oscillation Theory for Functional Differential Equations. Dekker, New York; 1995.
Gopalsamy K: Stability and Oscillations in Delay Differential Equations of Population Dynamics. Kluwer Academic, Dordrecht; 1992.
Gyori I, Ladas G: Oscillation Theory of Delay Differential Equations with Applications. Clarendon, Oxford; 1991.
Hale JK: Theory of Functional Differential Equations. Springer, New York; 1997.
Arino O, Gyori I, Jawhari A: Oscillation criteria in delay equations. J. Differ. Equ. 1984, 53: 115-123. 10.1016/0022-0396(84)90028-7
Berezansky L, Braverman E: On some constants for oscillation and stability of delay equations. Proc. Am. Math. Soc. 2011,139(11):4017-4026. 10.1090/S0002-9939-2011-10820-7
Braverman E, Karpuz B: On oscillation of differential and difference equations with non-monotone delays. Appl. Math. Comput. 2011, 58: 766-775.
Elbert A, Stavroulakis IP: Oscillations of first order differential equations with deviating arguments. World Sci. Ser. Appl. Anal. 1. In Recent Trends in Differential Equations. World Sci. Publ., River Edge; 1992:Univ. of Ioannina T.R. No. 172 (1990)163-178. Univ. of Ioannina T.R. No. 172 (1990)
Elbert A, Stavroulakis IP: Oscillation and non-oscillation criteria for delay differential equations. Proc. Am. Math. Soc. 1995, 123: 1503-1510. 10.1090/S0002-9939-1995-1242082-1
Erbe LH, Zhang BG: Oscillation of first order linear differential equations with deviating arguments. Differ. Integral Equ. 1988, 1: 305-314.
Jaroš J, Stavroulakis IP: Oscillation tests for delay equations. Rocky Mt. J. Math. 1999, 29: 139-145.
Jian C: Oscillation of linear differential equations with deviating argument. Math. Pract. Theory 1991(in Chinese), 1: 32-41. (in Chinese)
Kon M, Sficas YG, Stavroulakis IP: Oscillation criteria for delay equations. Proc. Am. Math. Soc. 2000, 128: 2989-2997. 10.1090/S0002-9939-00-05530-1
Koplatadze RG, Chanturija TA: On the oscillatory and monotonic solutions of first order differential equations with deviating arguments. Differ. Uravn. 1982, 18: 1463-1465.
Koplatadze RG, Kvinikadze G: On the oscillation of solutions of first order delay differential inequalities and equations. Georgian Math. J. 1994, 1: 675-685. 10.1007/BF02254685
Kwong MK: Oscillation of first order delay equations. J. Math. Anal. Appl. 1991, 156: 286-374.
Ladas G: Sharp conditions for oscillations caused by delay. Appl. Anal. 1979, 9: 93-98. 10.1080/00036817908839256
Ladde GS, Lakshmikantham V, Zhang BG: Oscillation Theory of Differential Equations with Deviating Arguments. Dekker, New York; 1987.
Li B: Oscillations of first order delay differential equations. Proc. Am. Math. Soc. 1996, 124: 3729-3737. 10.1090/S0002-9939-96-03674-X
Myshkis AD: Linear homogeneous differential equations of first order with deviating arguments. Usp. Mat. Nauk 1950(in Russian), 5: 160-162. (in Russian)
Philos CG, Sficas YG: An oscillation criterion for first-order linear delay differential equations. Can. Math. Bull. 1998, 41: 207-213. 10.4153/CMB-1998-030-3
Sficas YG, Stavroulakis IP: Oscillation criteria for first-order delay equations. Bull. Lond. Math. Soc. 2003, 35: 239-246. 10.1112/S0024609302001662
Stavroulakis IP: Oscillation criteria for delay and difference equations with non-monotone arguments. Appl. Math. Comput. 2014, 226: 661-672.
Wang ZC, Stavroulakis IP, Qian XZ: A survey on the oscillation of solutions of first order linear differential equations with deviating arguments. Appl. Math. E-Notes 2002, 2: 171-191.
Yu JS, Wang ZC, Zhang BG, Qian XZ: Oscillations of differential equations with deviating arguments. Panam. Math. J. 1992, 2: 59-78.
Zhou Y, Yu YH: On the oscillation of solutions of first order differential equations with deviating arguments. Acta Math. Appl. Sin. 1999,15(3):288-302.
Ladas G, Laskhmikantham V, Papadakis JS: Oscillations of higher-order retarded differential equations generated by retarded arguments. In Delay and Functional Differential Equations and Their Applications. Academic Press, New York; 1972:219-231.
Ladas G, Stavroulakis IP: Oscillations caused by several retarded and advanced arguments. J. Differ. Equ. 1982, 44: 134-152. 10.1016/0022-0396(82)90029-8
Hunt BR, Yorke JA:When all solutions of oscillate. J. Differ. Equ. 1984, 53: 139-145. 10.1016/0022-0396(84)90036-6
Fukagai N, Kusano T: Oscillation theory of first order functional differential equations with deviating arguments. Ann. Mat. Pura Appl. 1984, 136: 95-117. 10.1007/BF01773379
Grammatikopoulos MK, Koplatadze RG, Stavroulakis IP: On the oscillation of solutions of first order differential equations with retarded arguments. Georgian Math. J. 2003, 10: 63-76.
arXiv: Infante, G, Koplatadze, R, Stavroulakis, IP: Oscillation criteria for differential equations with several retarded arguments. Funkc. Ekvacioj (to appear). arXiv: 1309.6213
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The author declares that he has no competing interests.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0), which permits use, duplication, adaptation, distribution, and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Stavroulakis, I.P. A survey on the oscillation of differential equations with several deviating arguments. J Inequal Appl 2014, 399 (2014). https://doi.org/10.1186/1029-242X-2014-399
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1029-242X-2014-399