
Abstract
This study introduces a novel Cubic Trigonometric Nu-Spline (CTNS) with a shape parameter tailored for curve designing, ensuring geometric continuity of order 2. The CTNS possesses fundamental geometric properties such as convex hull, partition of unity, affine invariance, and variation diminishing, which are thoroughly discussed herein. Notably, our spline technique is enriched with Nu-Spline constraints, offering compelling local and global shape control capabilities. These capabilities encompass point tension, interval, or global tensions, enhancing versatility across various shape impacts. Beyond its curve designing prowess, the proposed technique exhibits commendable precision in estimating control points. Furthermore, its utility extends to diverse fields including electronics, medical image interpolation, manipulator path planning, and discrete time signal processing. Through numerical experimentation, we demonstrate the simplicity of implementing the CTNS algorithm alongside its superior accuracy compared to existing techniques.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
It has been remarked that the geometric modeling is an important branch of mathematics than might be reasonably expected. At the first sight, the power of geometric may indeed seems surprising through more matures reflection on this leads us to anticipate the validity of spline in the real world. Viewed in this light, the various kinds of splines that have flourished in the past, and that might be conceivably be developed in the future, can be regarded as potentials starting point for construction of all the different possible sciences.
The Spline theory have been a colorful history; the few words we devote to this topic for convenient departure point for the rest of our narratives. The Spline theory is one of the few branches of mathematics that may be to said have a starting date. Schoenberg [1] used an analytic function to contribute to the problem of estimation of uniform data. Lewis [2] developed the basis for the B-spline under weighted Nu constraints. Pruess [3] constructed smooth interpolated spline-based function with shape parameter. Sarfraz [4] discussed the detail study of curve and surfaces by applying \(C^{2}\) rational biquadratic spline. Sarfraz et al. [5] define the local support basis form with shape control parameters using a rational cubic spline. Duan et al. [6] constructed rational spline with a parabolic denominator. Duan et al. [7] established a weighted rational biquadratic spline using two kinds of rational biquadratic spline with linear denominator. Sarfraz [8] developed a new technique for demonstrating objects by using parabolic splines with extra degrees of freedom. Hussain et al. [9] develop two techniques by rational spline for the designing of objects. Sarfraz et al. [10] utilized a rational biquadratic spline for structuring of different objects. Han. [11] used a piecewise rational spline with cubic a numerator and parabolic denominator to preserve the format of the object.
Trigonometric splines assume a significant role in electronics furthermore, medicine. Samreen et al. [12] constructed an imperative technique for the designing of objects using weighted parabolic trigonometric interplant with one shape parameter. Samreen et al. [13] developed parabolic trigonometric Nu-Spline with one shape parameter. Sarfraz et al. [14] developed cubic trigonometric Spline (CTS) with two families of shape parameters and discuss the error analysis of CTS, which is of order 3. Sarfraz et al. [15] proposed an efficient scheme to build weighted splines. Samreen et al. [16] constructed the quadratic trigonometric interpolant scheme comparative to the cubic polynomial spline for shape modeling.
Several mathematicians have worked on geometric modeling by using spline function in recent years. Due to their geometrical behavior, spline functions are considered to be very useful in curve modeling. Hashmi et al. [17] used CBS functions to find the solution of fractional Burger equation. Khalid et al. [18] presented a computational algorithm based on polynomial and non-polynomial splines for the solutions of numerical problems arising in hydrodynamic and magnetohydrodynamic stability theory. Its application in signal processing been investigated by Harim et al. [19] via rational quartic spline interpolation (RQSI). They [20] also used RQSI with three parameters for the positivity preserving interpolation of curves and discussed some sufficient conditions. Tassaddiq et al. [21] developed a new scheme using CBS to solve numerical problems arising in viscoelastic flows and hydrodynamic stability by achieving iterative scheme with Caputo-Fabrizio fractional derivative. Ghaffar et al. [22] used nine-tic b-spline to draw the various curve and surface model. For solving the problems arising in astrophysics, a computational approach based on the cubic B-spline method is established by Khalid et al. [23]. Samreen et al. [24] developed a quadratic trigonometric B-spline as an alternative to cubic B-spline.
[25] developed multivariate adaptive regression splines (MARS) model to predict the settlement of shallow-reinforced sandy soil foundations (RSSFs).
In this paper, significant plan has been used to build cubic trigonometric Nu-Spline (CTNS) utilizing cubic trigonometric function with very much controlled format impact of shape parameters. Also, provided the proof of geometric characteristics such as convex Hull, affine invariance, and variation diminishing. The graphical demonstration of CTNS contributes various shape parameters which can be satisfactory and especially steady for various shape impacts like point, interval, and global tensions. This paper is organized as follows: Sect. 2 analyzes the CTNS in the interpolation structure. Sections 3 and 4 discuss different geometric and shape properties of the proposed spline. The representation of the constructed spline has been delineated in Sect. 6. While Sect. 8 concludes the paper.
2 The cubic trigonometric NU-spline
Let \(\left\{ (x_{m},f_{m}),m=0,1,2,...,n \right\} \) be the given data set define over [c, d] where \(c=x_{0}<x_{1}<x_{2}<...<x_{n}=d\). The CTNS is defined as:
where \(Q_{0}(x)=(1-sin\theta )^3,\) \(Q_{1}(x)=(3sin\theta -4sin^{2}\theta +sin^{3}\theta )\),
\(Q_{2}(x)=(3cos\theta -4cos^{2}\theta +cos^{3}\theta )\), \(Q_{3}(x)=(1-cos\theta )^3\) and,
The CTS in (1) can in like manner be formed as:
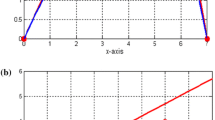
where \(Q_{m}(\theta )\), \(m=0\, to\, 3\) is basis functions in Fig. 1 with

Basis functions
Also,
Now, apply the following constraints equations, Nu-Spline features are combine into cubic trigonometric spline as follow:
In matrix form, the weighted continuity equation can be summarized as:
To compute the constraints, it is essential to find the accompanying derivatives.
which are given as
It should be noted that,
where\(\,\Delta _{m}=\frac{{E_{m+1}}-E_{m}}{h_{m}}\) by (2), (4) and (5) alongside (6), (7) and (9), we get tri-diagonal system of linear equation as:
The above system in matrix form as,
and end conditions are given as:
Which is diagonally dominant for fitting end condition and for constraint \(w_{m}=1\) \(\forall \) m. Presently, it is efficient to get the LU-decomposition technique to explain this system. The above discourse yields the accompanying outcomes.
Theorem: For the constraints, shape parameter \(v_{m}\ge 0,m=1,2,...,n\), a unique solution of CTNS is accomplished.
3 Geometric characteristics
The CTNS satisfies the accompanying geometric and shape characteristics
Proposition 1
\(\mathrm{(Convex\,\, Hull\,\, Property)\!:}\) By (3) it can be easily shown that the CTNS curve, \(A(x)= \sum _{l=0}^{3}C_{l}(x)Q_{l}(x)\), for \(x\in [x_{m},x_{m+1}]\) with control points \(C_{l}=\left\{ E_{m},V_{m},W_{m},E_{m+1}\right\} ,\) exist within the control polygon formed by control points as shown in Fig. 2.

Convex hull property
Proposition 2
\(\mathrm{(Affine\,\, Invariance \,\,Property)\!:}\) The CTNS curve \(S(x)=\sum _{l=0}^{3}C_{l}(x)Q_{l}(x)\) for \(x\in [x_{m},x_{m+1}]\) with control points \(C_{l}=\left\{ E_{m},V_{m},W_{m},E_{m+1}\right\} \in {\mathbb {R}}^{n}\) is invariant under affine transformation.
Proof
Let T be an affine transformation, given by \(T=\left( px+qy+s,\,\,tx+uy+v\right) \) and let cubic trigonometric curve of degree n have control points \(b_{l}(w_{l},n_{l}),\,l=0,1,...,n\) then \(S(x)=(X(x),Y(x))\) \(=\,\left( \sum _{l=0}^{3}w_{l}Q_{l}(x),\sum _{l=0}^{3}n_{l}Q_{l}(x)\right) \).
Now, \(L(S(x))=\left( p\sum _{l=0}^{3}w_{l}Q_{l}(x)+q\sum _{l=0}^{3}n_{l}Q_{l}(r)+s,t\sum _{l=0}^{3}w_{l}Q_{l}(r)+u\sum _{l=0}^{3}n_{l}Q_{l}(r)+v\right) \).
since, \(\sum _{l=0}^{3}Q_{l}(x)=1\,for\,x\in [x_{m},x_{m+1}]\).
73 Thus,

Affine invariance property with a scaling, b translation, c rotation, and d shearing
Hence, we conclude that only control points are affected by transformation while the premise functions of \(C^{2}\) CTS continue as before.
The affine invariance property is illustrated in Fig. 3
Proposition 3
\(\mathrm{(Variation \,\,Diminishing\,\, Property)\!:}\) No plane of dimension \(N-1\) intersect a CTNS curve, \(S(m)=\sum _{l=0}^{3}C_{l}(x)Q_{l}(x)\) for \(x\in [x_{m},x_{m+1}]\) with control points \(C_{l}=\left\{ E_{m},V_{m},W_{m},E_{m+1}\right\} \) \(\in {\mathbb {R}}^{n}\), more times than it intersect its control polygon.
The variation diminishing property is displayed in Fig. 4.

a variation diminishing property b variation diminishing property violates for \(v_{k}=-4\)
4 Shape analysis
The constructed CTNS is helpful in numerous applications where an interval and global tension property is required. By varying, shape parameters not only the shape of the object is changed but also obtain the ideal changes in the wanted portion of the spline curve.
Preposition 1
\(\mathrm{(Point \,\,Tension\,\, Property)\!:}\) If \(v_{m}\rightarrow \infty \) for a fixed \(m=r\), then the rth equation in (11) consequences as:

Point Tension Property in CTNS (left to right) using \(v_{r}=0,3,10,100\)

Point tension property a, b in CTNS using \(v_{r}=0,5,10,50\)

a Shoe model contrasted by implying developed spline technique b Point Tension Property in CTNS using \(v_{r}=0,5,10,50\)

Interval tension property (left to right) using \(v_{r}=0,3,10,100\)
Thus, a corner at \(S_{r}\) will be appeared.

Interval tension in CTNS (left to right) using \(v_{r}=0,0.2,0.7,7\)

Interval tension property in CTNS at the base of figure (left to right) using \(v_{r}=0,3,10,100\)

Interval tension property (left to right) using \(v_{r}=0,0.3,1,3\)

Global tension property (left to right) using \(v_{r}=0,3,10,100\)

Force obtained through developed CTNS

Pressure obtained through developed CTNS
Proposition 2
\(\mathrm{(Interval \,\,Tension\,\, Property)\!:}\) In the comparative manner, If
then the rth and \((r+1)th\) equation in tri-diagonal system consequences as:
Thus, the curve is tighten in rth interval \([x_{r},x_{r+1}]\).
Proposition 3
\(\mathrm{(Global\,\, Tension\,\, Property)\!:}\) Similarly, if
then rth equation in (11) consequence as:
Thus, the curve is tighten globally in \([x_{1},x_{n-1}]\).
5 Algorithm for CTNS
-
Stage 1: Info Control points \(E_{j}\)s.
-
Stage 2: Calculate the tangents \(D_{i}s\), from the information points in Step 1, utilizing the system of linear equation (11).
-
Stage 3: Fit the CTNS strategy for Sect. 2.
-
Stage 4: In the event that the curve, accomplished in Step 3, is not as wanted by the fashioner then play with the shape parameter esteems is related with wanted control points of curves to such an extent that the ideal structure curve is accomplished.
6 Demonstration
Figure 5 demonstrates the impact of dynamic increment in point tension behavior locally at two inverse points of the figure. The left, right, top, and bottom curves have been exhibited for \(v_{r}=0,3,10,100\), respectively. Figure 6 shows the point tension property at the two corner points of the vase by using distinct values of \(v_{r}=0,5,10,50\) at the same Fig. In Fig. 7, point tension is applied at the above points of the circle through CTNS. The impact of high tension parameters is obviously observed at the relating point in the figure. Figure 8 demonstrates the impact of dynamic increment in the local interval tension in the base of the figure. Curves have been exhibited for \(v_{r}=0,0.2,0.7,7\), respectively. Figure 9 shows the interval tension at the base points by using \(v_{r}=0,3,10,100\). Figure 10 shows the impact of interval tension using \(v_{r}=0,0.3,1,3\). The impact of high tension parameters is obviously found in the comparing interval in the base of the figure. Figure 11 shows the impact of dynamically expanding the estimations of the point tension parameters \(v_{r}=0,3,10,100\) for the top, bottom, left, and right curves, respectively, at one of the points of the figure (Fig. 12). Figure 13 shows the force graph obtained by implying a developed spline technique. At the point when the individual leaves from the beginning strolling, the person applies a power upward on the shoe that is more prominent than the descending power of gravity so the shoe (and foot) speed up upward to begin the progression. At the point when the foot hits the ground, the ground applies an upward power on the foot, making it decelerate to a stop as the foot hits the ground. The quicker the foot halts, the bigger the deceleration and the bigger the effect power. When running on a surface like sand, the deceleration is essentially not as much as when running on concrete, so the effect power that the foot feels each progression is less for sand than for concrete. The greatest powers felt by the foot are during the takeoff stage instead of the heatstroke stage. This circulation is genuine, paying little heed to the running surface, yet the total estimation of the power shifts relying upon whether the surface is hard or delicate. Along these lines, running on a hard surface, like cement, makes higher weights on the foot than running on a delicate surface, like sand or grass .

Impulse obtained through developed CTNS
Figure 14 shows the pressure graph obtained by implying the developed spline technique. At the point when a heavier individual strolls, he applies a more noteworthy tension on the ground than a more modest individual with a similar shoe size and shape. The pressing factor under the chunk of the foot increments once more, yet the power is still not as much as what the impact point encounters during the impact point strike stage. Figure 15 shows the behavior of impulse constructed by a developed spline. A softer surface causes the deceleration to take longer than a hard surface, meaning that a foot feels a greater force landing on a hard surface than a soft one.
7 Features of CTNS technique
The contribution of the cubic trigonometric Nu-Spline (CTNS) lies in plentiful significant features that build up the field of curve designing and spline techniques:
Innovative Approach: The CTNS presents a unique approach to spline interpolation by mingling cubic trigonometric functions with Nu-Spline methodology. This meld of mathematical ideas advances a sole and innovative framework for curve designing, offering new avenues for exploration and application in various fields.
Shape Control Parameter:: One of the main influences of the CTNS is the integration of a shape control parameter into the spline framework. This parameter permits users to wield precise control over the shape of the resulting curve, facilitating personalized modifications to meet particular design requirements. This level of customization and flexibility represents a momentous advancement over traditional spline techniques.
Geometric Continuity: The CTNS guarantees geometric continuity of order 2, which is important to create smooth and visually appealing curves. By maintaining continuity between adjacent curve segments, the CTNS boosts the aesthetic excellence and usability of the constructed curves, making them appropriate for a wide range of applications.
Nu-Spline Constraints: The fusion of Nu-Spline constraints into the CTNS structure further enriches its skills for shape control. These constraints facilitate both local and global modifications to the curve shape, allowing for fine-tuning of various curve characteristics such as point tension, interval tension, and global tensions. This level of control endows users to achieve desired curve shapes with precision and accuracy.
Versatility and Applicability: The CTNS exhibits versatility and applicability across diverse domains, including electronics, medical imaging, robotics, and signal processing. Its capability to accurately interpolate data points while suggesting flexible shape control presents it a priceless tool for several engineering and scientific applications.
8 Conclusion
The mentioned CTNS technique represents a significant advancement in curve designing, particularly within the realm of computer graphics, geometric modeling, and computer-aided geometric design (CAGD).
The CTNS technique is primarily focused on curve designing, providing tools and methodologies for creating complex curves with precision and control. One notable aspect of the CTNS technique is its ability to estimate control points effectively. Control points play a crucial role in defining the shape and characteristics of a curve, and the CTNS technique ensures that these points are estimated in a reasonable and accurate manner. The CTNS technique is designed to be applied in various fields, including computer graphics and geometric modeling. This indicates its versatility and potential for use in diverse applications such as animation, rendering, and virtual prototyping. Curves generated using the CTNS technique exhibit several desirable geometric characteristics, including convex hull, affine invariance, and variation diminishing. These characteristics enhance the visual quality and mathematical properties of the curves, making them suitable for a wide range of applications. The proposed scheme has been evaluated and found to be satisfactory in terms of its performance. It offers reliable results and meets the requirements of users in terms of accuracy, efficiency, and usability. The CTNS technique is flexible and adaptable to different format impacts, such as point tension, interval tension, and global tension. This adaptability allows users to customize the behavior and appearance of curves according to their specific needs and preferences. Overall, the CTNS technique represents a significant contribution to the field of curve designing and geometric modeling, offering advanced features and capabilities that enhance the efficiency and quality of curve generation processes.
Data Availability Statement
The data used to support the findings of this study are available from the corresponding author upon request.
References
I.J. Schoenberg, Contributions to the problem of approximation of equidistant data by analytic functions. Part B. On the problem of osculatory interpolation. A second class of analytic approximation formulae. Q. Appl. Math. 4(2), 112–141 (1946)
J.W. Lewis, B-Spline bases for splines under tension, v-splines, and fractional order splines. SIAM Rev. 18(4), 815–815 (1976)
S. Pruess, Alternatives to the exponential spline in tension. Math. Comput. 33(148), 1273–1281 (1979)
M. Sarfraz, Curves and surfaces for computer aided design using \(C^{2}\) rational cubic splines. Eng. Comput. 11(2), 94–102 (1995)
M. Sarfraz, M. A. Raheem, Curve designing using a rational cubic spline with point and interval shape control. in 2000 IEEE Conference on Information Visualization. An International Conference on Computer Visualization and Graphics, pp. 63-68. IEEE (2000, July)
Q. Duan, X. Liu, F. Bao, Local shape control of the rational interpolation curves with quadratic denominator. Int. J. Comput. Math. 87(3), 541–551 (2010)
Q. Sun, F. Bao, Q. Duan, Shape-preserving weighted rational cubic interpolation. J. Comput. Inf. Syst. 8(18), 7721–7728 (2012)
M. Sarfraz, M.Z. Hussain, M. Ishaq, Modeling of objects using conic splines. J. Softw. Eng. Appl. 6(3B), 67 (2013)
M.Z. Hussain, M. Sarfraz, M. Ishaq, S. Sarfraz, Two Methods of Object Designing by Rational Splines. in 2014 18th International Conference on Information Visualisation, pp. 292-297. IEEE (2014)
M. Sarfraz, M. Ishaq, M.Z. Hussain, Shape designing of engineering images using rational spline interpolation. Adv. Mater. Sci. Eng. 2015, 260587 (2015)
X. Han, Shape-preserving piecewise rational interpolant with quartic numerator and quadratic denominator. Appl. Math. Comput. 251, 258–274 (2015)
M. Sarfraz, S. Samreen, M.Z. Hussain, Modeling of 2D objects with weighted-Quadratic Trigonometric Spline. in 2016 13th International Conference on Computer Graphics, Imaging and Visualization (CGiV) pp. 29-34. IEEE (2016, March)
M. Sarfraz, S. Samreen, M.Z. Hussain, A quadratic trigonometric Nu-spline with shape control. Int. J. Image Graph. 17(03), 1750015 (2017)
M. Sarfraz, F. Hussain, S. Hussain, M.Z. Hussain, GC1 cubic trigonometric spline function with its geometric attributes. in 2017 21st International Conference Information Visualisation (IV) pp. 405-409. IEEE (2017)
M. Sarfraz, S. Samreen, M.Z. Hussain, A quadratic trigonometric weighted spline with local support basis functions. Alex. Eng. J. 57(2), 1041–1049 (2018)
S. Samreen, M. Sarfraz, M.Z. Hussain, A quadratic trigonometric spline for curve modeling. PLoS ONE 14(1), e0208015 (2019)
M.S. Hashmi, M. Wajiha, S.W. Yao, A. Ghaffar, M. Inc, Cubic spline based differential quadrature method: a numerical approach for fractional Burger equation. Results Phys. 26, 104415 (2021)
A. Khalid, A. Ghaffar, M.N. Naeem, K.S. Nisar, D. Baleanu, Solutions of BVPs arising in hydrodynamic and magnetohydro-dynamic stability theory using polynomial and non-polynomial splines. Alex. Eng. J. 60(1), 941–953 (2021)
N.A. Harim, S.A.A. Karim, M. Othman, A. Ghaffar, K.S. Nisar, Rational quartic spline interpolation and its application in signal processing. in Advanced Methods for Processing and Visualizing the Renewable Energy pp. 1-23. (Springer, Singapore, 2021)
N.A. Harim, S.A.A. Karim, M. Othman, A. Saaban, A. Ghaffar, K.S. Nisar, D. Baleanu, Positivity preserving interpolation by using rational quartic spline. Aims Math. 5(4), 3762–3782 (2020)
A. Tassaddiq, A. Khalid, M.N. Naeem, A. Ghaffar, F. Khan, S.A.A. Karim, K.S. Nisar, A new scheme using cubic b-spline to solve non-linear differential equations arising in visco-elastic flows and hydrodynamic stability problems. Mathematics 7(11), 1078 (2019)
A. Ghaffar, M. Iqbal, M. Bari, S. Muhammad Hussain, R. Manzoor, K.S. Sooppy, D. Baleanu, Construction and application of nine-tic B-spline tensor product SS. Mathematics 7(8), 675 (2019)
A. Khalid, M.N. Naeem, P. Agarwal, A. Ghaffar, Z. Ullah, S. Jain, Numerical approximation for the solution of linear sixth order boundary value problems by cubic B-spline. Adv. Differ. Equ. 2019(1), 1–16 (2019)
S. Samreen, M. Sarfraz, A. Mohamed, A quadratic trigonometric B-Spline as an alternate to cubic B-spline. Alex. Eng. J. 61(12), 11433–11443 (2022)
M.N.A. Raja, S.K. Shukla, Multivariate adaptive regression splines model for reinforced soil foundations. Geosynth. Int. 28, 1–23 (2021)
Funding
Open access funding provided by the Scientific and Technological Research Council of Türkiye (TÜBİTAK).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no Conflict of interest to this work.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Munir, A., Samreen, S., Ghaffar, A. et al. A new cubic trigonometric Nu-Spline with shape control parameter and its applications. Eur. Phys. J. Plus 139, 606 (2024). https://doi.org/10.1140/epjp/s13360-024-05381-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1140/epjp/s13360-024-05381-y