
Abstract
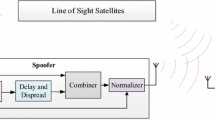
After renewed GLObal NAvigation Satellite System (GLONASS) was completed and it became world wide as its U.S. counterpart, Global Positioning System (GPS), the best way for increasing the number of satellites in the user’s view is combining these two systems. On the other hand, as it is possible for GPS satellites to be spoofed or blocked, combining becomes more efficacious. In this paper, GPS and GLONASS are used for positioning using Kalman filter. Kalman filter is utilized here because it is one of the cheapest and applicable tools for implementing on cheap processors. In addition, in this paper, we proposed a method against GPS signal spoofing based on combination of GPS and GLONASS regarding to pseudorange behavior in spoofing situations. The proposed method is not only easy to implement, but also low cost and high precision. This method without any need for expensive receiver has ability for real-time recognition of spoofing attacks and eliminating its effects. The recorded data was collected using an implemented GPS, and GLONASS RF front-end in stationary mode and in order to show spoofing effects on positioning an artificial spoofing was applied on GPS satellite signals in different scenarios. The simulation results showed a big improvement in Root Mean Square (RMS) error in comparison with GPS-only positioning in all spoofed scenarios.
Article PDF
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
References
Marais, J., Nahimana, D.F., Viandier, N., and Duflos, E., GNSS accuracy enhancement based on pseudo range error estimation in an urban propagation environment, Journal of Expert Systems with Applications, 2013, vol. 40, no.15, pp. 5956–5964.
Kuusniemi, H. and Lachapelle, G., GNSS signal reliability testing in urban and indoor environments, Proceedings of ION NTM Conference, San Diego, CA, 2004, pp. 1–15.
Cai, C. and Gao, Y., A combined GPS/GLONASS navigation algorithm for use with limited satellite visibility, Journal of Navigation, 2009, vol. 62, no. 4, pp. 671–685.
Humphreys, T.E., Ledvina, B.M., Psiaki, M.L., O’Hanlon, B.W., and Kintner, P.M., Assessing the spoofing threat: Development of a portable GPS civilian spoofer, Proceedings of 21st International Technical Meeting of the Satellite Division of the Institute of Navigation, USA, 2008, pp. 2314–2325.
Jahromi, A.J., Broumandan, A., Nielsen, J., and Lachapelle, G., GPS vulnerability to spoofing threats and a review of anti-spoofing techniques, International Journal of Navigation and Observation, 2012, vol. 2012, pp. 1–16.
Baziar, A.R., Moazedi, M. andMosavi, M.R., Analysis of single frequency GPS receiver under delay and combining spoofing algorithm, Journal of Wireless Personal Communications, 2015, vol. 83, no. 3, pp. 1955–1970.
Scott, L., Anti-spoofing and authenticated signal architectures for civil navigation systems, Proc. ION GPS/GNSS 2003, Institute of Navigation, Portland, Oregon, 2003, pp. 1542–1552.
Jin, M.H., Han, Y.H., Choi, H.H., Park, C., Heo, M.B., and Lee, S.J., GPS spoofing signal detection and compensation method in DGPS reference station, Proceedings of 11th International Conference on Control, Automation and Systems, Korea, 2011, pp. 1616–1619.
Borre, K. and Akos, D., A software-defined GPS and Galileo receiver: Single-frequency approach, in Proceeding of ION GNSS, the 18th International Technical Meeting of the Satellite Division, 2005, pp. 1632–1637.
Mosavi, M.R., Azarshahi, S., Emamgholipour, I., and Abedi, A.A., Least squares techniques for GPS receivers positioning filter using pseudorange and carrier phase measurements, Iranian Journal of Electrical & Electronic Engineering, 2014, vol.10, no.1, pp. 18–26.
Blanch, J., Walter, T., and Enge, P., Satellite navigation for aviation in 2025, Proceedings of the IEEE, 2012, vol. 100, Special Centennial Issue, pp. 1821–1830.
Angrisano, A., Gaglionend, S., and Gioia, C., Performance assessment of aided global navigation satellite system for land navigation, IET Journals on Radar, Sonar and Navigation, 2013, vol. 7, no. 6, pp. 671–680.
Bakula, M., Przestrzelski, P., and Kazmierczak, R., Reliable technology of centimeter GPS/GLONASS surveying in forest environments, IEEE Transactions on Geoscience and Remote Sensing, 2015, vol. 53, no. 2, pp. 1029–1035.
Gao, G.X. and Enge, P., How many GNSS satellites are too many, IEEE Transactions on Aerospace and Electronic Systems, 2012, vol. 48, no. 4, pp. 2865–2874.
Angrisano, A., Gaglione, S., and Gioia, C., Performance assessment of GPS/GLONASS single point positioning in an urban environment, Journal of Acta Geodaetica et Geophysica, 2013, vol. 48, no. 2, pp. 149–161.
Mosavi, M.R., Soltani Azad, M., and Emamgholipour, I., Position estimation in single-frequency GPS receivers using Kalman filter with pseudorange and carrier phase measurements, Journal of Wireless Personal Communications, 2013, vol. 72, no. 4, pp. 2563–2576.
Mosavi, M.R., Error reduction for GPS accurate timing in power systems using Kalman filters and neural networks, Journal of Electrical Review, 2011, vol. 87, no. 12, pp. 161–168.
Gomez-Gil, J., Ruiz-Gonzalez, R., Alonso-Garcia, S., and Gomez-Gil, F.J., A Kalman filter implementation for precision improvement in low-cost GPS positioning of tractors, Journal of Sensors, 2013, vol. 13, no. 11, pp. 15307–15323.
Borre, K., Akos, D.M., Bertelsen, N., Rinder, P., and Jensen, S.H., A Software-Defined GPS and Galileo Receiver: A Single-Frequency Approach, Applied and Numerical Harmonic Analysis, Birkhauser, Boston, 2007.
Borre, K. and Strang, G., Algorithms for Global Positioning, Wellesley-Cambridge Press, 2012.
Axelrad, P. and Brown, R.G., GPS navigation algorithms, in Global Positioning System: Theory and Applications, Vol. 1, ser. Progress in Astronautics and Aeronautics, Parkinson, B.W., Ed., Washington, DC: American Institute of Aeronautics and Astronautics, 1996.
Borre, K., The GPS EASY Suite Matlab Code for the GPS newcomer, Journal of GPS Solutions, 2007, vol. 7, no. 1, pp. 47–51.
Author information
Authors and Affiliations
Corresponding author
Additional information
Published in Russian in Giroskopiya i Navigatsiya, 2016, No. 3, pp. 14–25.
Rights and permissions
About this article

Cite this article
Mosavi, M.R., Tabatabaei, A. & Zandi, M.J. Positioning improvement by combining GPS and GLONASS based on Kalman filter and its application in GPS spoofing situations. Gyroscopy Navig. 7, 318–325 (2016). https://doi.org/10.1134/S2075108716040088
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S2075108716040088