
Abstract
The basic types of wall-climbing robots that use permanent magnets as locking devices are reviewed. The robots that use various locomotion techniques, viz., walking, wheeled, and caterpillar robots are considered. Special attention is paid to the design and control concept of the magnetic contact devices.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
INTRODUCTION
There are many operations in industry that are dangerous or impossible to perform without using robots, e.g., defectoscopy of the walls of the containers with toxic or radioactive substances, examination of ship hulls including their parts below the waterline, various operations performed at high altitudes, and cleaning skyscrapers’ facades. Many of these operations are performed by wall climbing robots fixed on the surface using different adhesion principles such as magnetic, vacuum, and electrostatic adhesion. In this work, walking, caterpillar, and wheeled robots are considered that move over a ferromagnetic surface using permanent-magnet contact devices. The contact devices of this type allow saving the energy consumed to fix the robot on the surface and prevent the detachment of the robot from the translation surface in case the power supply is shut off.
1. WALKING ROBOTS
Two- to six-legged walking robots are used most widely. A greater number of legs usually ensures greater stability and increases the payload capacity [1]; however, this makes the control more difficult and increases the weight and size of the robot. An advantage of such a locomotion technique is the capability of the robot to overcome obstacles on the translation surface in autonomous mode and its drawback lies in the more complicated control system compared with other locomotion types. Dual-platform robots that move in the cyclic mode alternately moving along each platform along the motion path can also be classified as walking robots.
At Instituto de automatica industrial, Madrid, Spain, six-legged REST1 and REST2 robots were developed to transfer payloads of up to 100 kg over vertical and horizontal ferromagnetic surfaces [2]. The robot and the design of its contact (locking) device are shown in Fig. 1. The locking device is a plate into which an array of magnetic switchable devices and rubber inserts designed to increase the adhesion coefficient are in built. The magnetic switchable device consists of two magnets, a permanent magnet and an electromagnet. As the leg detaches from the surface, the electromagnet induces a field opposite to the field of the permanent magnet, thus decreasing the resultant adhesion force. It is possible to generate a magnetic field codirectional with the field of the permanent magnet, which increases the resultant force. The locking device is attached to the leg via a spherical joint and a spring-type self-alignment mechanism, which allows the robot to adapt to the irregularities of the translation surface and move from the floor to the wall. Each leg is capable of holding up to 50% of the total weight of the robot on all possible slopes of the surface.

(a) The REST robot and (b) the general view of the magnetic locking device.
The 4Steel robot developed by a team of the National Institute of Nuclear Research, Mexico City, Mexico, the Technological Institute of Toluca, Toluca, Mexico, and the Technological Institute of San Juan del Río, San Juan del Río, Mexico [3], is intended for the ultrasonic diagnostics of large gas tanks. The robot has legs of a simple design with two degrees of freedom—a joint at the point where the leg is attached to the body and the possibility of telescoping the legs. The locking devices of the 4Steel robot are based on the same principle as the REST locking devices.
The Winspecbot robot constructed at South Westphalia University of Applied Sciences, Soest, Germany and the University of Gävle, Gävle, Sweden [4] is designed to inspect steel pipelines. It uses contact devices the design of which is shown in Fig. 2b where 1 is a servomotor, 2 is a connection rod, 3 is a permanent magnet, and 4 is an aluminum plate. When walking, the robot increases with the help of the servo actuator the distance between the magnet and the translation surface, thus decreasing the holding force. With the magnet withdrawn from it, plate 4 is capable of self-cleaning the ferromagnetic particles stuck to it, thus protecting the permanent magnet from dirt.

(a) The Winspecbot robot and (b) the general view of the magnetic locking device.
Two-legged robots are a multilink articulated structure that looks like a caterpillar fitted with contact devices at the ends.
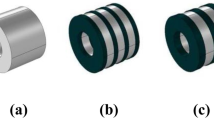
The Tremo robot developed at École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland [5] is a two-link mechanism with two locking devices at the ends (see Fig. 3). The locking device consists of three magnetic devices inside which a fixed permanent magnet (stator) and a moving magnet (rotor) are fitted. The rotating magnet is connected to an electric motor via a reduction gear; it can rotate 180° on its axis (an H-shaped configuration [6]). The principle of operation consists in redirecting the magnetic flux lines depending on the relative position of the magnets (see Fig. 3c where the arrows indicate the magnetic flux lines).

(a) The TREMO robot, (b) the general view of the magnetic switchable device, and (c) the schematic of the magnetic switchable device.
The robot constructed at Universidade de Coimbra, Coimbra, Portugal [7] is designed to move over ferromagnetic surfaces (Fig. 4). It is a two-link mechanism at the ends of which hinged contact devices are fixed. The locking device consists of a servomotor (Fig. 4a), a magnetic switchable device (Fig. 4b), two permanent magnets (Fig. 4c), and four bearings at the ends (Fig. 4d). The latter are designed to reduce the friction losses since the robot “rolls” the leg when walking. The principle of operation of the magnetic switchable device is similar to that of the TREMO robot.

(a) The general view of the robot and (b) the design of the magnetic locking device.
The robot developed by a team at the University of Technology Sydney, Sydney, Australia and New South Wales Roads & Maritime Services, Australia [8] shown in Fig. 5 is a three-link articulated mechanism with locking devices at the ends. Every locking device consists of three magnetic switchable devices fixed on a common frame. The magnetic device is an electric drive motor mounted on a frame with a gearwheel on the shaft and a toothed sector with a permanent magnet and a pressure transducer to control the adhesion [9]. The contact device is detached from the surface by turning the toothed sector.

(a) The general view of the robot and (b) the schematic of the magnetic locking device.
The robot created at Eidgenössische Technische Hochschule Zürich, Switzerland [10] is intended for nondestructive testing of boilers at coal-fired power plants. It is an articulated mechanism with two magnetic locking devices at the ends and two airscrews designed to deliver the robot to the starting point of the boiler’s inspection. The design of the locking device is shown in Fig. 6. The holding force is increased/decreased by moving the permanent magnet towards/away from the translation surface. The magnet is moved away from the surface by an electric motor and towards the surface, by an elastic rubber thread, which reduces the power consumption. To protect the magnet against ferromagnetic particles from the boiler walls, a rubber film 0.5 mm thick is used. This also allows the self-cleaning of the contact device.

The design of the robot’s contact device.
Dual-platform robots are comprised of two platforms that can move relative to each other. The robot moves by alternately detaching the locking devices of each platform from the ground and displacing the platform.
The robot developed by a team of Universidade da Coruña, Coruña, Spain and the IT University of Copenhagen, Denmark, is designed to sandblast vessel hulls; it uses pneumatic actuators (Fig. 7a) [11]. It consists of two frames interconnected by joints via linear actuators, which enables the robot to perform relative linear movements along two axes and allows the frames to rotate about 37° relative to each other. Each frame has four contact devices fixed by joints on the linear actuators of the legs, which enables the robot to adapt to the curvature of the vessel’s hull without losing the holding force. The locking devices consist of a permanent magnet with an electromagnet coil inside. The principle of operation of the magnetic switchable device is similar to that of the REST robot.

Dual-platform robots.
The Sadie robot [12] designed by a team of the City University of Hong Kong, the University of Southampton, UK, BNFL Magnox Generation Ltd, Berkeley, UK, and PORTECH Ltd, Portsmouth, UK was intended for the nondestructive testing of the weld joints of the nuclear reactor channels. It is comprised of a frame and a shuttle connected by a joint (Fig. 7b). The frame represents two parallel titanium tubes connected at the ends by the lock supports. The shuttle moves along the frame by a linear screw-and-nut actuator. The shuttle is rotated relative to the frame by a motor with a reduction gear, which enables the robot to change the direction of motion. The adhesion to the translation surface is effected by six vacuum and four magnetic contact devices. Every magnetic lock exerts a force of 800 N, which allows the robot to maintain stability on the bends of the pipeline when moving and increases the precision of the technological operations performed.
2. WHEELED ROBOTS
Wheeled robots represent a frame mounted on a chassis with a different number of wheels on which all robot components are mounted. These robots should be divided into two groups, namely, those with magnets outside the wheels and those with magnets built into the wheels; there are structures with magnets mounted simultaneously on the frame and in the wheels; there are very few of them, however. If the number of the wheels is less than three, this necessitates additional supports; more than three wheels may cause the wheels to hang out on the bends of the surface, which may make the robot fall down. This type of robots use unswitchable permanent magnets.
Robots with magnets mounted outside the wheels are shown in Fig. 8.

Robots with magnets outside the wheels.
The robot described in [13] (Fig. 8a) was developed for educational purposes at the University of Kaiserslautern, Germany. It consists of a wooden frame with four permanent magnets, two servo actuators with driving wheels, and an auxiliary wheel.
The robot constructed at Universidade de Vigo, Vigo, Spain, [14] is designed to inspect weld joints in shipbuilding (Fig. 8b). It is comprised of a body—two triangular aluminum plates connected by steel tie pieces—at the bottom of which three permanent magnets are mounted and on the top, two electric motors are installed. One of the motors is responsible for the synchronous rotation and the other effects the synchronous turning of all three wheels, which enables the robot to move in any direction without turning the body. The torque from the motor is transmitted to the wheels via driving belts.
The robots created at London South Bank University, UK [15, 16] is intended for inspection of joint welds. The robot described in [15] (Fig. 8c) consists of two articulated frames with magnet assemblies on the bottom surface, two driving wheels with differentiated servo actuators, which allows excellent maneuverability, and two omniwheels to maintain the equilibrium. The design with a hinged frame ensures the transfer between the translation surfaces. The robot described in [16] (Fig. 8f) has a simple design: four independent actuators and a magnetic contact device are fixed on a rectangular frame. The locking device consists of two magnets mounted on an iron support, which allows directing the magnetic lines more effectively.
The OmniClimber robot [17, 18] was designed at Universidade de Coimbra, Coimbra, Portugal to examine ferromagnetic surfaces with different curvature radii (Fig. 8d). It is comprised of three independent actuators with omniwheels mounted on a flexible three-link frame at an angle of 120° to each other. The structure also comprises a central, the strongest, magnet intended to create the required holding force, three lateral magnets to adapt the flexible frame to the curvature of the surface, and three annular magnets mounted on the wheel axles to increase the holding force. The lateral magnets generate a pressing force sufficient to bend the elastomer link of the frame, which enables the wheels to be always in contact with the translation surface.
The robot developed at the Southeast University, Nanjing, P.R. China, [19] is designed to inspect weld joints (Fig. 8e). This is a rectangular frame on which four independent actuators with omniwheels are installed, which allows the robot to move easily in any direction. The robot has wheels with a controllable suspension that allows the distance between the magnet and the translation surface to be adjusted and the wheel axle inclination to be varied to maintain a constant wheel–surface contact spot.
The M2000 robot [20] designed at Carnegie Mellon University, Pittsburgh, United States and the robot designed at Zhejiang University, Hangzhou, P.R. China [21] are intended for stripping paints and oxides from ship hulls. The M2000 robot (Fig. 8g) is a four-wheeled articulated frame responsible for turning with two solid axles fitted with a differential and an electric motor. The robot is equipped with two permanent magnets mounted at the bottom of the axles. The robot described in [21] (Fig. 8h) has two large magnetic locking devices intended for generation of the holding force and a small locking device to prevent tilting. The contact devices are two wheels on the common axle of which the annular sector of the magnet assembly comprised of a support, four magnets, and an aluminum separator is mounted.
The HISMAR robot [22] developed at Sir Joseph Swan Institute for Energy Research, Newcastle, England in cooperation with Stankin Moscow State Technological University, Russia is designed to clean ship hulls from biofouling (Fig. 8i). This is a four-wheeled platform with four independent actuators.
Robots with magnets fitted into the wheels are shown in Fig. 9.

Robots with magnets fitted into the wheels.
The robot designed at Eidgenössische Technische Hochschule Zürich, Switzerland [23] is intended for the nondestructive testing of ships’ gas tanks (Fig. 9a). On the frame, an electric motor is mounted that drives the wheels via a belt transmission. Changes in the motion path are not provided for; the robot uses the reinforcing ribs of the gas tank as guide rails.
The robot designed by a team at Eidgenössische Technische Hochschule Zürich, Switzerland and ALSTOM Ltd [24] is intended for the nondestructive testing of wind turbine generators with the rotor installed (Fig. 9b). It is comprised of a flexible frame—a combination of rigid plastic sections and flexible metal bands—and four flexible driving links. The height of the robot is 8 mm. Every link has 20 magnetic wheels mounted on a flexible axle driven by an electric motor via a gearwheel system.
The robot developed at Shanghai Jiaotong University, Shanghai, P.R. China [25] is designed to inspect weld joints (Fig. 9c). It is a modular structure. The motion module consists of a frame and four magnetic wheels driven by two electric motors via belt transmission.
The MagneBike robot (Fig. 9d) developed by a group of specialists at Eidgenössische Technische Hochschule Zürich, Switzerland, École polytechnique fédérale de Lausanne, Switzerland, and ALSTOM Ltd [26] is designed to inspect steam chests at power plants. It has two magnetic wheels with supporting rollers on the sides. It is turned through the degree of freedom of the front wheel and adapts to the surface slopes owing to the articulated joint of the fork to the body.
The Trubolaz (pipe-climber) robot [27] and the robot described in [28] developed at Ufa State Aviation Technical University, Russia are designed for the in-pipe diagnostics of variable-diameter pipelines and operations inside ship hulls, respectively. The Trubolaz robot (Fig. 9e) is a three-link mechanism that allows adaptation to complex-shaped surfaces with two magnetic wheels fitted with a mechanism that allows the detachment from the translation surface. The robot is remotely controlled via the Ethernet channel. The robot described in [28] (Fig. 9f) is a three-wheeled structure comprised of two modules connected by a passive revolute joint with mechanical stops to compensate for irregularities on the translation surface. It is equipped with actuators that allow variation of the axle spacing and orientation of the wheels to perform on-the-spot turns. The transfer between the surfaces is effected by swivel half-ring magnets controlled independently of the wheel, which allows the orientation of the attractive force vector perpendicular to the translation surface.
The robot developed by researchers of Zhejiang University, Hangzhou, P.R. China and Shanghai Branch of CNOOC EnerTech Equipment Technology Co. Ltd., Shanghai, P.R. China [29] deserves special attention. It is designed to clean underwater pipelines of various diameters. The robot has wheels both fitted into the wheels and installed on the body (Fig. 9g).
In Fig. 9h, a typical design of a wheeled contact device of the robots with magnets built into the wheels is shown [30].
3. CATERPILLAR ROBOTS
In Fig. 10, systems are shown that use caterpillar belts and magnets to move.

Caterpillar robots.
The robot developed by a team of the Dalhousie University, Halifax, Canada and the Three Gorges University, Yichang, P.R. China [31] (Fig. 10a) and the robot developed at Shanghai Jiaotong University, Shanghai, P.R. China [32] (Fig. 10b) are designed to inspect large steel containers. The Tripillar robot [33] (Fig. 10c) constructed at École Polytechnique Fédérale de Lausanne, Switzerland with magnets mounted on both the caterpillar track and the body is intended for inspection of the internal surface of coal-fired boilers, which determines its small size. The robot described in [32] has an articulated frame and a centerpoint suspension, which allows it to overcome irregularities of the translation surface.
The Combot robot [34], designed to deliver loads in shipbuilding (Fig. 10d), was developed by a team of specialists of Seoul National University, Seoul, ROK, Yeungnam University, Gyeongsan, ROK, and Samsung Electronics, Suwon, ROK. The robot consists of three basic modules connected by joints and a controllable tail; the turning option is not provided for.
The Lazaro robot [35] was designed at Universidad Politécnica de Cartagena, Spain to clean the ship hulls (Fig. 10e). It is different from the above robots in that the magnets are placed at the bottom of the body rather than built into the caterpillar track.
The Neptune robot [36] was constructed at Carnegie Mellon University, Pittsburgh, United States to inspect internal surfaces of oil containers (Fig. 10f). The robot uses mechanically switchable permanent magnets placed on the caterpillar frame, which allows reducing the resistance during turns on horizontal surfaces and ferromagnetic oxides from sticking to it.
The robot designed by a team of specialists of Shenzhen Institutes of Advanced Technology, CAS, Shenzhen, P.R. China, Harbin University of Science and Technology, P.R. China, the Chinese University of Hong Kong, and China Merchants Heavy Industry (Shenzhen) Co. Ltd. [37] is intended for moving over ship hulls (Fig. 10g). The contact devices of the robot are comprised of a caterpillar track and magnet units fixed on the former (Fig. 10i). The magnet unit is an aluminum frame (3) with a substrate (1) on which two permanent magnets (2) and a protection nylon cover (4) are installed.
The robot developed at Inner Mongolia University of Technology, Huhehot, P.R. China and Erdos Special Equipment Inspection Institute, Ordos, P.R. China [38] is intended for the nondestructive testing of large pressure vessels; it is fitted with pedrail tracks (Fig. 10h).
CONCLUSIONS
Walking robots have the best capacity to overcome obstacles in the autonomous mode, which makes them a preferable variant for moving over irregular surfaces; they are, however, complex in terms of mechanics and difficult to control. The locking devices of such robots are capable of self-cleaning ferromagnetic particles stuck to them through magnetic switchable devices and the cyclic mode of movement. The walking robots can also easily change the position of the body relative to the translation surface without changing the position of their feet.
Wheeled robots have the highest velocity, are simple in terms of mechanics, and easy to control. However, they are not suitable for overcoming obstacles and have a small contact area with the translation surface. The contact devices of most of these robots are not capable of self-cleaning since this feature makes the design more complicated.
Caterpillar robots allow the problem of a small contact area with the translation surface to be solved; moreover, they are capable of overcoming larger obstacles than the wheeled robots. However, the magnet units may be detached in turn from the surface, which causes the robot to tilt. This problem has to be solved individually depending on the functions of a particular robot. The contact devices of most caterpillar robots are also not capable of self-cleaning.
The study conducted by the authors suggests that the effect of magnetic hysteresis on the functioning of the permanent-magnet contact devices controlled by the magnetic adhesion via electromagnets has not been studied adequately. The matters of the equilibrium stability of the robots on a surface oriented towards the horizon at different angles have also not been investigated to a sufficient extent. The study of these problems will help determine the critical operating modes of wall-climbing robots and avoid emergencies.
REFERENCES
M. Minor, H. Dulimarta, G. Danghi, R. Mukherjee, R. L. Tummala, and D. Aslam, “Design, implementation, and evaluation of an under-actuated miniature biped climbing robot,” in Proceedings of the 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems (IEEE, Takamatsu, 2000).
J. Grieco, M. Prieto, M. Armada, and P. Gonzalez de Santos, “A six-legged climbing robot for high payloads,” in Proceedings of the International Conference on Control Applications (IEEE, Trieste, 1998).
S. R. Armando, G. G. Mayra, and G. L. Armida, “4Steel-robot: a climbing mobile robot for gas containers inspection,” in Proceedings of the 3rd WSEAS/IASME International Conference on Dynamical Systems and Control (WSEAS Press, Arcachon, 2007).
B. Kamagaluh, J. S. Kumar, and G. S. Virk, “Design of a multi-terrain climbing robot for petrochemical applications,” in Proceedings of the 15th International Conference on Climbing and Walking Robots CLAWAR (World Scientific, Baltimore, 2012).
F. Rochat, R. Beira, H. Bleuler, and F. Mondada, “Tremo: an inspection climbing inchworm based on magnetic switchable device,” in Proceedings of the International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines (World Scientific, Paris, 2011).
F. Rochat, P. Schoeneich, M. Bonani, S. Magnenat, F. Mondada, H. Bleuler, and H. Christoph, “Design of magnetic switchable device (MSD) and applications in climbing robot,” in Emerging Trends in Mobile Robotics (World Scientific, Nagoya, 2010).
J. C. Romao, M. Tavakoli, C. Viegas, N. Pedro, and T. Aní bal de Almedia, “Inchworm climber: a light-weight biped climbing robot with a switchable magnet adhesion unit,” in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems IROS (IEEE, Hamburg, 2015).
P. Ward, P. Quin, D. Pagano, D. Liu, K. Waldron, and G. Dissanayake, “Climbing robot for steel bridge inspection: design challenges,” in Proceedings of the Austroads Bridge Conference (ARRB Group, Sydney, 2014).
P. Ward, D. Liu, K. Waldron, and M. Hasan, “Optimal design of a magnetic adhesion for climbing robots,” in Proceedings of the 16th International Conference CLAWAR-2013 on Nature-Inspired Mobile Robotics (World Scientific, Sydney, 2013).
W. Fischer, C. Hurzeler, and R. Siegwart, “Lightweight magnetic foot with variable force, for docking/Landing with micro-helicopters on rust-covered walls in boiler furnaces,” in Proceedings of the International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines (World Scientific, Nagoya, 2010).
D. Souto, A. Faina, A. Deibe, F. Lopez-Pena, and R. J. Duro, “A robot for the unsupervised grit-blasting of ship hulls,” Int. J. Adv. Robot. Syst. 9 (3), 1–16 (2012).
B. L. Luk, T. S. White, D. S. Cooke, N. D. Hewer, G. Hazel, and S. Chen, “Climbing service robot for duct inspection and maintenance applications in a nuclear reactor,” in Proceedings of the 32nd International Conference on Robotics, Seoul, 2001.
K. Berns, T. Braun, C. Hillenbrand, and T. Luksch, “Developing climbing robots for education,” in Proceedings of the International Conference on Climbing and Walking Robots (Springer, Madrid, 2004).
J. Sanchez, F. Vazquez, and E. Paz, “Machine vision guidance system for a modular climbing robot used in shipbuilding,” in Proceedings of the 9th International Conference on Climbing and Walking Robots (Springer, Sheffield, 2006).
J. Shang, B. Bridge, T. Sattar, S. Mondal, and A. Brenner, “Development of a climbing robot for inspection of long weld lines,” Ind. Robot 35, 217–223 (2008).
M. O. F. Howlader and T. P. Sattar, “Development of magnetic adhesion based climbing robot for non-destructive testing,” in Proceedings of the Computer Science and Electronic Engineering Conference CEEC (IEEE, Colchester, 2015).
M. Tavakoli, L. Marques, and A. T. de Almeida, “OmniClimber: an omnidirectional light weight climbing robot with flexibility to adapt to non-flat surfaces,” in Proceedings of the International Conference on Intelligent Robots and Systems (IEEE, Vilamoura, 2012).
M. Tavakoli, J. Lourencxo, C. Viegas, P. Neto, and A. T. de Almeida, “The hybrid omniClimber robot: wheel based climbing, arm based plane transition, and switchable magnet adhesion,” Mechatronics 36, 136–146 (2016).
J. Li and X. S. Wang, “Novel omnidirectional climbing robot with adjustable magnetic adsorption mechanism,” in Proceedings of the 23rd International Conference on Mechatronics and Machine Vision in Practice (M2VIP) (IEEE, Nanjing, 2016).
B. Ross, J. Bares, and C. Fromme, “A semi-autonomous robot for stripping paint from large vessels,” Int. J. Robot. Res. 22, 617–626 (2003).
W. Song, H. Jiang, T. Wang, D. Ji, and S. Zhu, “Design of permanent magnetic wheel-type adhesion-locomotion system for water-jetting wall-climbing robot,” Adv. Mech. Eng. 10 (7), 1–11 (2018).
V. S. Balashov, B. A. Gromov, I. L. Ermolov, and A. P. Roskilly, “Cleaning by means of the HISMAR autonomous robot,” J. Russ. Eng. Res. 31, 589–592 (2011).
W. Fischer, F. Tache, and R. Siegwart, “Inspection system for very thin and fragile surfaces, based on a pair of wall climbing robots with magnetic wheels,” in Proceedings of the International Conference on Intelligent Robots and Systems IROS (IEEE, San Diego, 2007).
W. Fischer, G. Caprari, R. Siegwart, and R. Moser, “Compact climbing robot rolling on flexible magnetic rollers, for generator inspection with the rotor still installed,” in Proceedings of the 14th International Conference on Climbing and Walking Robots (World Scientific, Paris, 2011).
F. E. I. Yanqiong and S. Libo, “Design and analysis of modular mobile robot with magnetic wheels,” Trans. Appl. Theor. Mech. 3, 902–911 (2008).
F. Tache, W. Fischer, G. Caprari, R. Moser, F. Mondada, and R. Siegwart, “Magnebike: a magnetic wheeled robot with high mobility for inspecting complex shaped structures,” J. Field Robot. 26, 453–476 (2009).
R. A. Munasypov, T. R. Shakhmamet’ev, and S. S. Moskvichev, “Remotely operated robotic system for inner diagnostics of pipelines,” Robototekh. Tekh. Kibern., No. 3, 73–77 (2014).
R. A. Munasypov, T. R. Shakhmamet’ev, S. S. Moskvichev, P. V. Sletnev, and I. V. Meshkov, “High mobility robotic platform for the tasks of diagnosing elements of ship structures,” in Proceedings of the International Conference on Extreme Robotics (AP4Print, St. Petersburg, 2016).
J. Fan, C. Yang, Y. Chen, H. Wang, Z. Huang, Z. Shou, P. Jiang, and Q. Wei, “An underwater robot with self-adaption mechanism for cleaning steel pipes with variable diameters,” Ind. Robot. 45, 193–205 (2018).
W. Fischer, F. Tache, and R. Siegwart, “Magnetic wall climbing robot for thin surfaces with specific obstacles,” in Field and Service Robotics: Proceedings of the 6th International Conference (Springer, Chamonix, 2008).
W. Shen and J. Gu, “Permanent magnetic system design for the wall-climbing robot,” in Proceedings of the International Conference on Mechatronics and Automation (IEEE, Niagara Falls, 2005).
Z. Xu and P. Ma, “A wall-climbing robot for labelling scale of oil tank’s volume,” Robotica 20, 209–212 (2002).
F. Rochat, P. Schoeneich, O. Nguyen, and M. Francesco, “Tripillar: miniature magnetic climbing robot with plane transition ability,” in Proceedings of the International Conference on Climbing and Walking Robots (World Scientific, Istanbul, 2009).
G. Lee, J. Kim, and T. Seo, “Combot: compliant climbing robotic platform with transitioning capability and payload capacity,” in Proceedings of the International Conference on Robotics and Automation ICRA (IEEE, Saint Paul, 2012).
F. Ortiz, D. Alonso, J. Pastor, B. Alvarez, and A. Iborra, “A reference control architecture for service robots as applied to a climbing vehicle,” in Proceedings of the 10th Ada-Europe International Conference on Reliable Software Technologies (Springer, New York, 2005).
H. Schempf, B. Chemel, and N. Everett, “Neptune: above-ground storage tank inspection robot system,” IEEE Robot. Autom. Mag. 2 (2), 9–15 (1995).
J. Mao, K. He, J. Li, and X. Sun, “Simulation and experimental verification of permanent magnet adsorption unit for wall-climbing robot,” in Proceedings of the IEEE International Conference on Information and Automation (IEEE, Ningbo, 2016).
Y. J. Zhu, Z. X. Cui, Z. H. Feng, Y. P. Guo, R. D. Shi, J. L. Li, T. Yang, and W. Z. Zhang, “Effect of magnetic components on the smoothness of linear motion for a pedrailed wall-climbing robot,” IOP Conf. Ser.: Mater. Sci. Eng. 382, 052049 (2018).
Funding
This work was performed as part of a state program of the Institute for Problems in Mechanics, Russian Academy of Sciences, project no. AAAA-A17-117021310384-9 and supported by Program I-29 of the Russian Academy of Sciences “Topical Problems of Robotic Systems,” project no. AAAA-A17-11721120036-3.
Author information
Authors and Affiliations
Corresponding authors
Additional information
Translated by O. Lotova
Rights and permissions
About this article

Cite this article
Syrykh, N.V., Chashchukhin, V.G. Wall-Climbing Robots with Permanent-Magnet Contact Devices: Design and Control Concept of the Contact Devices. J. Comput. Syst. Sci. Int. 58, 818–827 (2019). https://doi.org/10.1134/S1064230719050137
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S1064230719050137