
Abstract
It is shown theoretically that under the effect of plasma flows typical of transient processes in tokamaks not only can Kelvin–Helmholtz instability develop and waves arise on a molten metal surface, pulsating bumps of different sizes also can occur. The formation of bumpy surfaces should be expected at ITER. The maximum possible bump size has been determined. If a bump occurs with a size larger than the maximal one it will be displaced by plasma “wind,” forming streams that flow to the periphery of the region exposed to the plasma flow. These streams transfer the molten metal over the surface. The sizes of bumps whose tops can be blown by the plasma wind, thus causing droplet erosion, were also determined.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1. INTRODUCTION
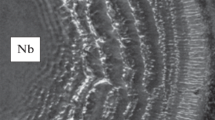
The use of tungsten receiving divertor plates and beryllium tiling of the first wall is planned in the ITER tokamak international project [1]. These elements will be exposed to high-power pulsed plasma flows during the development of ELM instabilities at the plasma edge, when energies of 0.2–5 MJ/m2 will be released during 0.1–1 ms [2], or during disruptions, when energies of 12–70 MJ/m2 will be released during 1.5–3 ms [3]. Under the effect of such plasma pulses, the melting of metal coatings and transport of a molten metal layer over the surface can occur. As a result of this, the thickness of the plasma facing tiles will decrease and, consequently, their service life will be reduced. Another negative consequence of molten metal transport over the surface may be the alloying of the adjacent plates that are in contact with plasma. Since the plasma conditions characteristic of the ELM-events or disruptions in ITER cannot be reproduced in any of the currently operating tokamaks, plasma accelerators [4, 5] and electron beams [6, 7] are used to test the protective coatings. QSPA plasma accelerators produce plasma flows with characteristics that correspond as closely as possible to the plasma flows expected in the ITER tokamak during ELM-events and disruptions [8]. QSPA pulses have the necessary energy density and duration. However, in a QSPA, the plasma flow pressure is several atmospheres, while the pressures expected in the ITER during ELM-events and disruptions are ~102 and ~103 Pa, respectively. Studies of metal erosion under the effect of QSPA pulses have shown [8] that two types of relief formed at the surface exposed to the plasma pulses can be distinguished. In the first case, waves are formed that propagate to the periphery of the region exposed to plasma (Fig. 1).

The surface of a niobium target after exposure to 25 QSPA pulses with an energy of 1.9 MJ/m2 [8].
In the second case, no waves are seen on the surface and although the surface temperature was much lower than the boiling temperature, the surface is covered with bumps, which the authors called “bubbles” (Fig. 2). Moreover, in many cases, traces of molten metal displacement are not seen on the bumpy surface, although the pattern of the entire region exposed to plasma indicates the formation of a crater in the center of the plasma flow and the displacement of metal at the periphery. In other experiments with increasing power of the plasma flow the surface relief changed and it was observed that the jets flowing towards the periphery of the exposed to the plasma region are formed from the bumps (Fig. 3).

The surface of a copper target after exposure to QSPA pulses [8].

Reliefs formed on the surface of a niobium target as the plasma loads increase [8].
The formation of waves on the molten metal surface under the effect of the plasma pulse was observed as long ago as [9]. At the same time, the formation of the wave relief was explained by the development of Kelvin–Helmholtz (KH) instability. The wave propagation and the transport of the molten metal under the effect of the plasma “wind” were explained in [10]. However, the formation of the bumpy surface has not yet been explained. In the presented work, a mechanism is proposed for the formation of bumps on a molten metal surface, above which a plasma flow moves parallel to the surface. Under these conditions, the transport of metal from the center to the periphery and the emission of drops are also explained. As an example, numerical estimates will be made for tungsten and beryllium, which are of the greatest interest for further ITER experiments. Therefore, we present the basic parameters of these metals that were used in the calculations. The densities are ρW = 19 250 kg/m3 and ρBe = 1840 kg/m3, the surface tensions are σW = 5 N/m and σBe = 2 N/m, and the kinematic viscosity for both W and Be was assumed to be ν = 3 × 10–7 m2/s.
2. A MECHANISM FOR THE FORMATION OF A BUMPY SURFACE
If a plasma flow moves parallel to a molten metal surface above it, then a Bernoulli pressure gradient will be formed above the surface, which determines the force that affects the protruding irregularities of the surface. This force is directed upward relative to the surface and causes the formation of the bumpy surface. The simplest form of the bump is an axially symmetric hummock, which has the smallest surface area, and, therefore, surface energy, compared to the axially asymmetric hummock. Let us consider the formation of an axially symmetric bump on a molten metal surface, above which plasma with density ρ' moves parallel to the surface at a speed of u (R is the radius of the base of the bump and H is its height). Neglecting the viscosity of the liquid metal (the role of the viscosity will be estimated below), we write the Euler equation for a liquid surface with surface tension σ in the presence of a Bernoulli pressure gradient above the liquid surface:
where ρ is the liquid density, \(v\) is the vertical velocity, h is the rise height of the surface above the unperturbed level, σΔh = σr–1∂(r∂h/∂r)/∂r is the surface tension pressure, and P = ρ'u2/2 is the Bernoulli pressure. In this case, only the force caused by the Bernoulli pressure gradient is important; therefore, we will choose the bump-bound coordinate system: the bump height h and its radius r. The effect of the plasma flow pressure on the bump will be considered in the next sections. Equation (1) has a solution in the form of a concentric standing wave shifted upward due to the Bernoulli pressure gradient. This solution can be expressed in terms of Bessel functions. A ring-shaped region with a lowered liquid level is formed around the wave center in the phase of its rise. The phase of the rising ring level corresponds to the phase of the falling center of a bump. However, we are interested only in the time dependence of the height of the wave of the central bump H = h(0). We simplify the problem by replacing the grad and Δ operators by 1/R and 1/R2, respectively. We then obtain the equation for the height of the wave of the central bump H:
which has the following solution:
The maximum bump height Hm= PR2/4σ is determined by the condition of equality of the Bernoulli pressure and the surface tension; the initial bump height H0 determines the initial phase of the oscillations: cos φ = 1 – H0/Hm. The bump pulsates at a frequency of ω2 = (4σ/R3ρ), which is accurate within the coefficient and coincides with the frequency of the capillary oscillation, for example, of a liquid spherical drop or capillary waves; however, in the expressions for these frequencies, the drop radius or the wavelength are used instead of the bump radius [11]. In equations (1) and (2), it is possible to neglect viscosity if the damping constant of oscillations, which is equal to 4π2ν/R2 [11] (ν is the kinematic viscosity), is less than the oscillation frequency ω. This is true, when
Equations (1) and (2) do not impose any restrictions on the bump radius R; therefore, pulsating bumps of different sizes can arise simultaneously. These bumps have the form of “bubbles” [8] and during the pulse the molten metal surface resembles the surface of a boiling liquid. If we assume that the bump occurrence is determined not by irregularities that give rise to the growing bump, but by the development of the bump itself, which proceeds over a time of approximately ω–1, then it will be clear that small bumps appear more often, since the frequency depends on the bump radius as follows: ω ~ R–3/2. We can then assume that the probability of the bump formation is proportional to ω. In this case, we obtain the following size distribution of the pulsating bumps:
In the real pattern of the plasma-metal surface interaction, the bumps can overlap and small bumps can occur on the surface of larger ones. In this case, the determination of the distribution function f(R) becomes more complicated. Therefore, distribution (5) gives only a general idea of the size distribution of the number of bumps.
The minimum size of the bumps is determined by the viscosity, which damps the oscillations. This is determined by equation (4) and is several hundred nanometers. However, the minimum size of the bumps that are visible on the surface after it becomes solid is much larger. This size is determined by the bump smoothing after termination of the plasma pulse; it will be estimated below. The maximum size of the bumps that arise during a pulse with duration τ = 10–3 s (hereinafter, we assume τ = 10–3 s in all estimates) is equal to Rm = (στ2/ρ2π2)1/3 ≈ 1 mm.
Thus, if the plasma flow moves parallel to the molten metal surface above it, then both the wavy relief that occurs due to the KH instability and pulsating bumps can form on the surface.
Let us determine the cases in which the pulsating bumps occur and when the tangential instability develops to form KH waves. Generally [11], the conditions for developing tangential instability can be fulfilled at a flat boundary between two mediums. Therefore, it is natural to assume that KH waves can form on a surface with a roughness size less than the wavelength of the KH waves λ = 3πσ/2P. Hence, the KH waves can arise on the surface with a typical bump size of:
The same criterion (differing by a numerical coefficient) can be obtained if we assume that KH instability will develop if its growth rate γ = 2P3/2/σρ1/2 is higher than the bump pulsation frequency ω. This approach provides a criterion as follows: R < σ/P. This implies that small bumps (with sizes less than the wavelength λ of the KH perturbations) are preferentially formed. However, if initially there are bumps on the surface, for example, they were created by the previous pulses, then the KH instability will not develop on the uneven surface, and pulsating bumps are most likely formed with larger sizes of R > σ/P. At low plasma flow pressures, for example, such as those expected at ITER during ELM-events and disruptions (P = 102…103 Pa), the critical size of the bumps that prevents KH instability becomes larger than the maximum size of the bump that can be formed during the pulse with duration τ = 1 ms. In addition, during ELM-events and disruptions the regions exposed to the plasma flow can be different in different events; thus, in most cases, the plasma flow falls on a surface with traces of previous pulses, which treated another surface area and had different parameters. Therefore, at ITER, the formation of a bumpy surface should be expected but not KH waves.
3. MELT TRANSPORT ACROSS A BUMPY SURFACE
In the previous section, we ignored the effect of the plasma wind on the bumps, i.e., the effect of the lateral pressure produced by the tangential plasma flow. Previously, we were only interested in the formation of bumps; therefore, we took only the force that occurs due to the Bernoulli pressure gradient into account, which is directed normally to the surface. The plasma wind causes the deformation of the bump. However, in the phase of pulsations, when the bump height H is zero, this deformation disappears and in the next pulsation period the bump grows and simultaneously becomes deformed in the same way. However, the deformation of large bumps results in the formation of molten metal streams, which transport metal over the surface.
Let us derive the condition for the formation of the molten metal jets that were observed in [8]. It is natural to assume that the streams arise as a result of “blowing” of the bump by the plasma wind. The plasma wind pressure affects the bumps and tends to shift them to the periphery of the region exposed to the plasma flow. Under the effect of the plasma wind pressure force equal to F ≈ PHR, a bump with the mass ρR2H acquires the following acceleration:
which only occurs while its height is nonzero. If the bump displacement is less than R during the time ω–1 the accumulated momentum is transmitted to the entire liquid metal in the phase with Н = 0 and the bump pulsation then continues. If the bump displacement is larger than R during the time ω–1 it will move like a drop gliding over the surface while dragging a stream of liquid metal. The bump displacement s can be estimated as
The condition for starting the bump motion as a drop is s > R or R > 2πσ/P. The large bumps move and the higher the plasma flow pressure is the smaller the bumps are that are displaced by the plasma wind.
Bump displacement by the distance R occurs in time t1, which can be calculated from the following equation
Substituting time t1 into solution (3), we obtain the height Н1, at which the bump can be displaced
Thus, in reality, the bump height cannot exceed its radius, as one could conclude from expression (3).
The melt moves after the moving drop because it is dragged due to the viscous friction. As a result, a moving liquid metal jet forms. The velocity of the stream gliding over the surface is determined by the condition of equality of the plasma wind pressure force, which is equal to ~PR2 and the drag force of the jet \(F = \rho vL\nu \),
where ν is the kinematic viscosity and L is the stream length. Assuming that \(v = dL{\text{/}}dt\), we obtain the jet length (drop path) that forms during the pulse duration τ:
It can be seen in Fig. 3 that the stream lengths increase with increasing plasma flow pressure and the larger streams have the longer paths. The melt is mainly transported by the largest streams, which arise from the largest bumps.
We note that in the experiments in [8] streams were observed that were larger than those permissible in accordance with the criterion for KH wave formation on a flat surface. This means that the bumps, and then the streams, occur if the initial surface is no longer flat, or, as it is further assumed, the bumps arise before the KH waves as the plasma flow momentum slowly increases.
The criterion R > 2πσ/P for the formation of streams formally shows that at the plasma flow pressures expected at ITER large bumps with R ≈ 1 cm cannot form. However, it was shown in [12] that during a pulse a dense plasma layer can form near the surface with a pressure higher than that in the initial plasma flow. This layer forms mainly as a result of evaporation of the drop. Therefore, the formation of streams and the transport of molten metal cannot be ruled out.
4. EMISSION OF DROPS
The emission of drops [13] from the bumps can be explained by “blowing” of the tops of bumps by the plasma wind, just as in the case of drop emission from KH waves [12]. The plasma wind force P acts upon the top of the bump; moreover, due to the viscosity, during time t, the top of the wave with a vertical size of
behaves like a liquid placed on a solid base. If during time t the top displaces by a distance equal to the top base d it will be torn off the base in the form of a drop.
To estimate the base of the top d we approximate the bump profile as follows
we then obtain
The time of the displacement of the top by the distance d is
where a = P/ρd is the acceleration of the top. Equating the times t derived from expressions (13) and (15), we can calculate the height of the top that is torn off
One top is torn off in time t2 after another:
For small bumps, for which t2ω > 1 and R < (νρ)2/9σ7/9P–8/9, the drops have insufficient time to be torn off during the period of the bump pulsations. With increasing plasma flow pressure the smaller bumps can be involved in the process of drop emission; the number of emitted drops increases as ~R–3/2. As a result, the emission of drops, which is the main mechanism for the material ablation under the effect of the high-power plasma flows, sharply increases with increasing plasma flow pressure. This corresponds to the results of [13], in which the experimentally measured number of tungsten droplets emitted per pulse increased from 100 to 300 with an increase in the plasma flow energy from 1.2 to 2.2 MJ/m2.
5. SURFACE MODIFICATION AFTER THE END OF THE PLASMA PULSE
The surface relief observed in the experiments is a result of the surface modification after the plasma pulse end. This modification occurs during the solidification of the melt. Let us estimate the time required for the cooling the metal to the melting temperature Tm and its solidification. Even for tungsten, with its high melting point, the cooling of the molten and heated layer occurs due to thermal conductivity. The solidification time is equal to
Here, С is the specific heat, ΔТ is the excess of the melt temperature over the melting temperature, Нmelt is the melting heat, d is the depth of the molten layer, χ is the thermal diffusivity, and τ is the plasma pulse duration. It is important to determine which streams stop moving before the solidification starts and which ones stop moving as a result of solidification. The stream stops moving in a time of tc ≈ R2/ν due to the friction force F = \(\rho vLvc\), with the acceleration being:
The small streams, for which tc < ts, stop moving before the solidification begins. If the streams stop moving before the solidification begins they are smoothed as a result of the surface tension pressure in a characteristic time of tp = (ρR3/σ)1/2 < 1 µs. The larger streams with a radius of R > (ντ)1/2 ~ 10 µm continue to move until the beginning of solidification and are still visible on the surface after solidification.
The damping constant for the bump pulsations is γd ≈ ν(π/R)2; thus, the size of the bumps that have time to be smoothed is R = π(νts)1/2, which is several tens of microns. Finally, only large bumps are visible on the surfaces exposed to plasma.
We note that under the effect of the QSPA pulses [8] the formation of a bumpy surface was observed on the less refractory and lower-density metal samples, while KH wave formation was observed on heavy metal samples and samples with a high melting point. It is interesting that in the same work [8], under the effect of the QSPA pulses a clearly pronounced wave relief (Fig. 1) and a bumpy relief with bumps turning into jets (Fig. 3) were obtained on the surface of a niobium sample. Currently, it is impossible to explicitly explain these distinctive relief features; however, we can suppose the effect of the following factors. First, it was already noted that the initial surface roughness affects the relief pattern. Second, the transition time for the plasma flow pressure in the QSPA pulses is approximately t0 ≈ 0.1ms [8]. As the pressure increases and the formation of the KH waves is not yet possible, nevertheless, bumps with sizes up to R ≈ (\(\sigma t_{{\text{o}}}^{2}{\text{/}}\rho \))1/3 ≈ 100 microns can be formed, which can prevent the formation of KH waves. As the plasma flow pressure decreases the jets can stop moving, while the formation of the bumpy surface continues; as a result, only the bumpy surface is seen and the jets are no longer visible. Since there are considerable fluctuations in the plasma flow pressure [8], the variability of the conditions makes it possible to obtain different surface reliefs.
CONCLUSIONS
A mechanism has been proposed for the formation of pulsating bumps of different sizes on the surface of the molten metal. Such bumps are formed under the effect of the plasma flows formed in tokamaks during ELM-events and disruptions. In fact, pulsating bumps are axially symmetric standing waves initiated by the Bernoulli pressure gradient, which forms when the plasma flow moves parallel to the surface. Along with the propagation of Kelvin–Helmholtz waves, a bumpy surface formation was observed in experiments at the QSPA plasma accelerators [8]. At ITER, we expect that a bumpy relief will be formed on the molten regions of the surface, but not KH waves. During ELMs and disruptions in ITER the plasma pressure will be less than that in the QSPA shots so that the region exposed to the plasma flow will displace over the surface and the surface exposed to the plasma pulse will have irregularities. The conditions were found under which the bumps can be blown out by the plasma wind and the jets can occur that flow to the periphery of the region exposed to the plasma, which cause the transport of molten metal over the surface. The mechanism has been described here for the emission of drops from the tops of bump resulting from blowing the tops of bumps by the plasma wind.
REFERENCES
T. Hirai, H. Maier, M. Rubel, Ph. Mertens, R. Neu, E. Gauthier, J. Likonen, C. Lungu, G. Maddaluno, G. F. Matthews, R. Mitteau, O. Neubauer, G. Piazza, V. Philipps, B. Riccardi, et al., Fusion Eng. Des. 82, 1839 (2007).
A. Loarte, G. Saibene, R. Sartori, V. Riccardo, P. Andrew, J. Paley, W. Fundamenski, T. Eich, A. Herrmann, and G. Pautasso, Phys. Scr. 128, 222 (2007).
R. A. Pitts, S. Carpentier, F. Escourbiac, T. Hirai, V. Komarov, S. Lisgo, A. S. Kukushkin, A. Loarte, M. Merola, A. Shashala Naik, R. Mitteau, M. Sugihara, B. Basylev, and P. C. Stangeby, J. Nucl. Mater. 438, 48 (2013).
H. Würz, N. I. Arkhipov, V. P. Bakhtin, I. Konkashbaev, I. Landman, V. M. Safronov, D. A. Toporkov, and A. M. Zhitlukhin, J. Nucl. Mater. 220−222, 1066 (1995).
V. G. Belan, V. F. Levashov, V. S. Maynashev, A. D. Muzichenko and V. L. Podkovirov, J. Nucl. Mater. 233−237, 763 (1996).
R. Duwe, W. Kühnlein and H. Münstermann, in Proceedings of the 18th Symposium on Fusion Technology (SOFT), Karlsruhe,1994, p. 355.
K. Nakamura, S. Suzuki, T. Tanabe, M. Dairaku, K. Yokoyama, and M. Akiba, Fusion Eng. Des. 39−40, 295 (1998).
I. M. Poznyak, N. S. Klimov, V. L. Podkovyrov, V. M. Safronov, A. M. Zhitlukhin, and D. V. Kovalenko, Vopr. At. Nauki i Tech. Ser. Termoyadernyi Sintez, No. 4, p. 23 (2012).
V. P. Bakhtin, V. I. Vasiliev, Yu. B. Grebenstchikov, I. K. Konkashbaev, Yu. V. Kucheryavyi, V. I. Myanko, and V. M. Strunnikov, in Proceedings of the 1st All Union Conf. “Constructive Materials Properties Modification by Beams of Charged Particles,” Moscow,1988, Part I, p. 108.
Yu. V. Martynenko, Phys. Procedia 71, 9 (2015).
L. D. Landau and E. M. Lifshitz, Fluid Mechanics (Nauka, Moscow, 1986; Pergamon, Oxford, 1987).
Yu. V. Martynenko, Plasma Phys. Rep. 43, 324 (2017).
N. S. Klimov, V. L. Podkovyrov, A. M. Zhitlukhin, V. M. Safronov, D. V. Kovalenko, A. A. Moskacheva, and I. M. Poznyak, Vopr. At. Nauki i Tech. Ser. Termoyadernyi Sintez, No. 2, p. 52 (2009).
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated by I. Grishina
Rights and permissions
About this article

Cite this article
Martynenko, Y.V. Surface Erosion of Metals under the Effect of Plasma Flows Typical of Transient Processes in Tokamaks. Plasma Phys. Rep. 46, 77–82 (2020). https://doi.org/10.1134/S1063780X20010146
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S1063780X20010146