
Abstract
The dynamics of micro/nanoelectromechanical systems (M/NEMS) is a core research area in micromechanics. Due to the nonlinearities and the singular nature of actuation forces that emerge in these systems, it has become a promising and challenging research area. The foremost objective of this manuscript is to examine the dynamics of M/NEMS by approximating rational terms involved in M/NEMS structures. An M/NEMS switch under electromagnetic force is adopted to reveal the effectiveness of the expansion of rational terms. Taylor series is employed to approximate the rational function into the summation of simple terms. The well-known variational iteration method is engaged to obtain the dynamic pull-in threshold value, the nonlinear frequency, and the analytical solution of the objective system. The solution obtained from the proposed strategy exhibits good agreement with observations obtained numerically. As opposed to the existing approaches, the suggested scheme achieves a high level of accuracy.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1. INTRODUCTION
Devices based on micro/nanoelectromechanical systems (M/NEMS) receive considerable attention due to their architectural simplicity and broad applicability. They need a few mechanical components and low voltage levels to actuate [1]. Numerous future technologies, including gas/mass sensors, detectors, memory systems, logic devices, wearable sensors, and gyroscopes, are the potential applications of M/NEMS [2–6]. To further utilize M/NEMS in various applications, it is essential to understand the mechanical and dynamic actions of the movable mechanisms of these systems.
The lumped parameters are the most important structural elements in many M/NEMS-based devices. Most of their configurations comprise a stationary base and a movable component under various conditions. Understanding the linear and nonlinear dynamic actions of the movable elements of such structures is very important for their successful implementation in several innovative technologies. Dynamic pull-in instability that depends on some parameters is an important phenomenon associated with M/NEMS devices. The analysis of pull-in instability, particularly the pull-in threshold value, is crucial for efficient operation and reliability of these devices. Exploring the vibratory behavior of M/NEMS, in addition to pull-in analysis, is a difficult task due to zero total energy (zero potential and kinetic energies) at the initial time moment. The appearance of dominating nonlinearities in M/NEMS structures is another significant challenge for researchers and engineers. If we ignore nonlinearities, they can lead to incorrect solutions. Actuation forces and detecting mechanisms are the core source of these nonlinearities. A lot of forces have an impact on M/NEMS, such as van der Waals attraction [7], electrostatic force [8], Casimir force [9], etc. The periodic behavior is difficult to predict under these circumstances.
In engineering and physics, it is a well-known fact that, when compared to the electrostatic force, the magnetic force is massive [10], and thus using it as the sensing force has benefits in many applications [11–20]. Particularly, in such applications as vibration-based energy harvesting devices [3, 13, 15] and in M/NEMS of certain composition [14, 16, 17], the actuation by magnetic force or field is at an advantage. On the other hand, the nanobridge and switch stability in the magnetic field has been thoroughly analyzed in [17–20]. The authors of these publications successfully proved the effects of the magnetic force on actuating devices, numerically estimated the pull-in threshold conditions, and analyzed periodicity.
Recently, Zhang and Pang [21] considered the following mathematical model of a nonlinear oscillator based on M/NEMS:
under zero initial conditions:
where u(t)—the displacement of the movable part at any given time, and k—the electromagnetic force parameter. Equation (1) describes the motion of the M/NEMS-based switch having a current-carrying conductor subjected to an electromagnetic excitation force with a linear spring restoring force. Electromagnetic actuation is responsible for the rational term in Eq. (1). For a detailed description of the model, readers can see the case study simulated by He et al. [10].
In their analysis, Zhang and Pang [21] applied the Laplace transform-based variational iteration method (VIM) to obtain the following nonlinear frequency ω of Eq. (1) (Eq. (21) in [21]):
From Eq. (3), it is obvious that ω can be obtained only when k ≤ 0.17157. For k > 0.17157, the analytic solution of the MEMS-based oscillator cannot be achieved (dynamic pull-in occurs), which is given as follows (Eq. (19) in [21]):
Thus it can be concluded that Eq. (1) has oscillatory (periodic) solutions at k ≤ 0.17157, and pull-in instability occurs at k > 0.17157. Hence k = 0.17157 is the dynamic pull-in threshold value. However, according to He et al. [10], the exact threshold value is k = 0.20363. Consequently, the pull-in threshold has an error of more than 15% for the case of [21], too large to be used for practical applications.
There are several techniques to investigate the dynamics of nonlinear oscillatory M/NEMS: the harmonic balance method [22], the energy balance method [23], the variational approach [24], the max-min technique [25], the parameter expansion method [26], the higher-order Hamiltonian technique [27], Adomian decomposition method [28], the homotopy perturbation method [29], the variational iteration method [7], the two-scale fractal method [30] and some other well-known techniques [31–33]. The variational iteration method is a powerful technique among them, capable of solving analytically nonlinear differential equations and leading to truthful results.
The VIM was first proposed in 1998 [34] and has been utilized to solve a spectrum of nonlinear problems [35–39]. The method entails using a Lagrange multiplier to generate a suitable correction functional, which is optimally determined by the variational theory and integral transforms [40, 41]. Recently, the VIM and its various modifications [42, 43], including He–Laplace VIM [21], were widely applied to numerous applications [44–46] and helped investigate the pull-in phenomena of M/NEMS oscillators [7, 21]. On the other hand, most authors did follow the standard solution process [34], and errors emerged in the simplified algorithm. This paper shows that the standard VIM algorithm [34] always leads to extremely high accuracy.
In this manuscript, we suggest using the VIM for investigating the nonlinear oscillatory behavior of Eq. (1). The term due to electromagnetic force is represented with the help of the well-known Taylor series. Then, we solve the transformed oscillatory problem by employing the VIM to obtain nonlinear approximate frequency and the corresponding analytic solution for zero initial conditions. This strategy also approximates the pull-in threshold in terms of model parameters. We compare the results of the VIM to those achieved computationally by the fourth-order Runge–Kutta method (RK4) for verification. We also match the VIM results to those attained by Zhang and Pang [21] to ensure the effectiveness of the approximation of actuation force.
2. PRELIMINARIES
2.1. Basic Concept of the VIM
To illustrate the basic idea, we consider a nonlinear differential equation in its general form
where \(\tilde L\) and \(\tilde N\) are the linear and nonlinear operators, respectively, and h(t) is the inhomogeneous term. The VIM algorithm enrolls the following correction functional for Eq. (5):
Here λ is the Lagrange multiplier, which can be found optimally via the variational theory. The subscript m denotes the mth approximate solution, and \({\tilde u_m}\) is the restricted variation, i.e. \(\delta {\tilde u_m} = 0.\)
2.2. Generalized Cubic Formula
The generalized cubic formula [47] facilitates finding roots of the cubic equation in its general form:
where p, q, r, and s are the real coefficients of the cubic equation. Let
and
where the symbols 3√ and √ correspond to any cube root and square root, respectively. The choice of using + or – is arbitrary in ±. All the roots of cubic Eq. (7) can be obtained by using the formula
where \(\eta = {{( - 1 + \sqrt { - 3} )} \mathord{\left/ {\vphantom {{( - 1 + \sqrt { - 3} )} 2}} \right. \kern-\nulldelimiterspace} 2}.\) The formula stated in Eq. (10) is invalid if we cannot express the roots with cube roots.
3. STANDARD VIM ALGORITHM FOR PROBLEM SOLUTION
The variational iteration method is used in this section to improve the solution of Eq. (1) under zero initial conditions. We can approximate the actuation force term involved in Eq. (1) as
Thus Eq. (1) can be rewritten as
Due to Eq. (5), the above equation can be expressed as
where
By utilizing Eq. (6), we can construct the correction functional:
To find the Lagrange multiplier, we have to calculate the variation of Eq. (16). As \({\tilde u_m}(\xi )\) is the restricted variation, we have \(\delta \tilde N[{\tilde u_m}(\xi )] = 0.\) Therefore, the variation of Eq. (16) can be calculated as
The initial conditions u(0) = u′(0) = 0 imply that δum(0) = δu′m(0) = 0. Thus we can deduce the following equations:
Upon solving Eq. (18), we can find the Lagrange multiplier:
Thus the iterative formula for Eq. (16) has the form
Now consider the integral
Using the above relation, Eq. (20) acquires the form
By employing zero initial conditions, the iterative formula can further be reduced to
According to the condition u(0) = u′(0) = 0, it is realistic to adopt the initial guess to zero, i.e. u0(t) = 0. Using this value of the initial guess in Eq. (15), we have \(\tilde N[u(t) = 0] = k.\) Thus, the first-order approximate solution of Eq. (1) can be obtained using Eq. (22):
To achieve a higher-order solution, we expand the binomial series up to the third degree in Eq. (15), and, when Eq. (23) is substituted, one can obtain
After simple calculations we obtain
The coefficient of cos ωt (the secular term) must be equal to zero in order to ensure the periodicity in the solution, i.e.
By substituting Eq. (24) into Eq. (22), the second-order approximate solution can be expressed as
Hence the nonlinear frequency and the approximate solution of Eq. (1) can be attained by Eq. (25) and (26), respectively.
4. RESULTS AND DISCUSSION
4.1. Dynamic Pull-In Analysis
From basic oscillation theory, it is known that an oscillatory problem under zero initial conditions has a periodic solution if it is in the range of critical value, while the pull-in solution occurs beyond that acute value. This critical value is called the pull-in threshold, and, to find this, we utilize the generalized formula for cubic polynomials.
From Eq. (26), no secular term can be rewritten after the substitution ω2 = v:
To solve the above cubic equation, we just implement the generalized cubic formula discussed in the Sect. 2.2. For this
Here the discriminant term
has the single nonnegative real root k = 0.20498. This is the acute value, which differentiates the periodic solution from the pull-in solution. Pull-in occurs when k > 0.20498, but we have periodicity in the solution below that critical value. Thus the pull-in thrеshold value is k = 0.20498 with a percentage inaccuracy of less than 1% as compared to the values specified by Zhang and Pang [21]. Hence the threshold error is optimized from 15% to no more than 1%.
The nonlinear frequency can approximately be calculated by using Eq. (10):

where \(\eta = {{( - 1 + \sqrt { - 3} )} \mathord{\left/ {\vphantom {{( - 1 + \sqrt { - 3} )} 2}} \right. \kern-\nulldelimiterspace} 2}.\)
4.2. Supremacy of the Proposed Solution
The nonlinear approximate frequency of the M/NEMS-based oscillator can be calculated from Eq. (30) at various values of the electromagnetic force parameter k. Frequency values obtained by the VIM (Eq. (30)), He–Laplace VIM [21] (Eq. (3)), and RK4 method are compared in Table 1. It displays the correctness of the nonlinear frequency achieved by the VIM as compared to the frequency obtained by Zhang and Pang [21]. Thus, the extreme percentage error is no more than 2% in the case of the VIM and more than 4% in the case of [21] at the parameter k ≤ 0.17. Moreover, the present study helps compute the nonlinear frequency at k > 0.17 up to the exact threshold value presented by He et al. [10], whereas the study stated by Zhang and Pang [21] failed to do so. This fact guarantees the supremacy of the present technique over the existing one.
Table 2 displays the error of the maximum amplitude obtained by the VIM and by the method proposed by Zhang and Pang [21] at the same parameter k. It is seen that the error is smaller for the case of the VIM at all k: the maximum error is less than 2% at k ≤ 0.17 and less than 3% at k > 0.17. On the other hand, there is a greater than 6% error at k ≤ 0.17 in the case of [21]. Thus, we can conclude that the present method is far better than the method developed by Zhang and Pang [21].
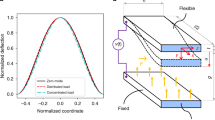
Figures 1 and 2 include the results obtained by the VIM [21] and the RK4 method. Three different values of electromagnetic force parameter k are adopted far from the threshold value (Fig. 1), whereas three are near the threshold value (Fig. 2). The left column of Figs. 1 and 2 shows solutions obtained by the RK4 method (blue line), He–Laplace VIM [21] (black line), and VIM (red line). These comparisons authenticate that the analytical results obtained approximately by the VIM match remarkably well to the computational results of the RK4 method. We also plot an error-time graph for similar values of the parameter k in the right column of Figs. 1 and 2. Black stars and red circles along lines specify the error of the He–Laplace VIM (the RK4 solution minus the He–Laplace VIM solution [21]) and the VIM error (the RK4 solution minus the VIM solution from Eq. (26)), respectively. From Fig. 1 it is seen that both errors are negligible, but all right-hand panels confirm the supremacy of the proposed strategy over the existing technique [21]. Throughout the time span considered here, the error is observed to be very close to zero. However, from Fig. 2 it is seen that, as the threshold value is approached, the error of [21] also increases, while it is negligible in the case of the VIM. During the time mentioned here, the maximum absolute error of the proposed strategy is 0.00632, 0.0087, 0.0185 at k = 0.15, 0.16, 0.17, respectively. On the other hand, the maximum absolute error is 0.00993, 0.0238, 0.0701 at the same values of k for the method proposed by Zhang and Pang [21]. This fact ensures that the current strategy is superior to the previous one [21].

Comparison of approximate solutions and error analysis at small values of parameter k (color online).

Comparison of approximate solutions and error analysis at near-threshold values of parameter k (color online).
5. CONCLUSIONS
Many engineering applications require a highly accurate estimation of the pull-in instability of micro/nanoelectromechanical systems (M/NEMS). The variational iteration method is engaged in this manuscript to improve the solution of a nonlinear oscillator based on M/NEMS by approximating the actuation force. We achieved the following objectives in this study.
We suggested a scheme for the analytical solution of oscillatory systems under zero initial conditions.
By employing the proposed technique, the pull-in threshold value, the nonlinear approximate frequency, and the corresponding approximate solution of the nonlinear model were optimized with great success. The relative error was low even when the system reaches the pull-in instability.
As a result, the present study is far better than the existing one (where rational functions are not approximated) to analyze the system before its implementation in M/NEMS-based devices.
Consequently, this strategy to employ the approximant of the actuation force can be applied to other lumped parameter-based M/NEMS where the initial conditions are zero as well.
REFERENCES
Kumar, M., Yadav, S., Kumar, A., Sharma, N.N., Akhtar, J., and Singh, K., MEMS Impedance Flow Cytometry Designs for Effective Manipulation of Micro Entities in Health Care Applications, Biosens. Bioelectron., 2019, vol. 142. https://doi.org/10.1016/j.bios.2019.111526
Geetha, M. and Dhanalakshmi, K., Structural Design and Realization of Electromechanical Logic Elements Using Shape Memory Alloy Wire Actuator, Phys. Mesomech., 2020, vol. 23, no. 5, pp. 446–456. https://doi.org/10.1134/S1029959920050082
Khanlo, H.M. and Dehghani, R., Distributed-Parameter Dynamic Modeling and Bifurcation Analysis of a Trapezoidal Piezomagnetoelastic Energy Harvester, J. Appl. Comput. Mech., 2022, vol. 8(1), pp. 97–113. https://doi.org/10.22055/JACM.2019.30823.1785
Anjum, N., He, J.H., Ain, Q.T., and Tian, D., Li–He’s Modified Homotopy Perturbation Method for Doubly-Clamped Electrically Actuated Microbeams-Based Microelectromechanical System, Facta Univ.-Ser. Mech., 2021, vol. 19(4), pp. 601–612. https://doi.org/10.22190/FUME210112025A
He, J.H., Yang, Q., He, C.H., and Alsolami, A.A., Pull-down instability of the quadratic nonlinear oscillators, Facta Univ.-Ser. Mech., 2023. https://doi.org/10.22190/FUME230114007H
Malikan, M., Uglov, N.S., and Eremeyev, V.A., On Instabilities and Post-Buckling of Piezomagnetic and Flexomagnetic Nanostructures, Int. J. Eng. Sci., 2020, vol. 157. https://doi.org/10.1016/j.ijengsci.2020.103395
Mohammadiana, M., Application of the Variational Iteration Method to Nonlinear Vibrations of Nanobeams Induced by the Van der Waals Force under Different Boundary Conditions, Eur. Phys. J. Plus., 2017, vol. 132, pp. 169–181. https://doi.org/10.1140/epjp/i2017-11438-4
Anjum, N., He, J.H., He, C.H., and Ashiq, A., A Brief Review on the Asymptotic Methods for the Periodic Behaviour of Microelectromechanical Systems, J. Appl. Comput. Mech., 2022, vol. 8(3), pp. 1120–1140. https://doi.org/10.22055/JACM.2022.39404.3401
Sedighi, H.M. and Bozorgmehri, A., Dynamic Instability Analysis of Doubly Clamped Cylindrical Nanowires in the Presence of Casimir Attraction and Surface Effects Using Modified Couple Stress Theory, Acta Mech., 2016, vol. 227, pp. 1575–1591. https://doi.org/10.1007/s00707-016-1562-0
He, J.H., Nurakhmetov, D., Skrzypacz, P., and Wei, D.M., Dynamic Pull-In for Micro-Electromechanical Device with a Current-Carrying Conductor, J. Low Freq. Noise Vib. Act. Control, 2020. https://doi.org/10.1177/1461348419847298
Abd-Alla, A.M., Abo-Dahab, S.M., Ahmed, S.M., and Rashid, M.M., Effect of a Magnetic Field on the Propagation of Waves in a Homogeneous Isotropic Thermoelastic Half-Space, Phys. Mesomech., 2020, vol. 23, no. 1, pp. 54–65. https://doi.org/10.1134/S1029959920010063
Malikan, M. and Eremeyev, V.A., Flexomagnetic Response of Buckled Piezomagnetic Composite Nanoplates, Compos. Struct., 2021, vol. 267. https://doi.org/10.1016/j.compstruct.2021.113932
Shishesaz, M., Shirbani, M.M., Sedighi, H.M., and Hajnayeb, A., Design and Analytical Modeling of Magneto-Electromechanical Characteristics of a Novel Magneto-Electro-Elastic Vibration-Based Energy Harvesting System, J. Sound Vib., 2018, vol. 425, pp. 149–169. https://doi.org/10.1016/j.jsv.2018.03.030
Malikan, M. and Eremeyev, V.A., Effect of Surface on the Flexomagnetic Response of Ferroic Composite Nanostructures; Nonlinear Bending Analysis, Compos. Struct., 2021, vol. 271. https://doi.org/10.1016/j.compstruct.2021.114179
Shirbani, M.M., Shishesaz, M., Hajnayeb, A., and Sedighi, H.M., Coupled Magnetoelectro-Mechanical Lumped Parameter Model for a Novel Vibration-Based Magneto-Electro-Elastic Energy Harvesting Systems, Physica E, 2017, vol. 90, pp. 158–169. https://doi.org/10.1016/j.physe.2017.03.022
Malikan, M. and Eremeyev, V.A., On a Flexomagnetic Behavior of Composite Structures, Int. J. Eng. Sci., 2022, vol. 175. https://doi.org/10.1016/j.ijengsci.2022.103671
Malikan, M. and Eremeyev, V.A., On Nonlinear Bending Study of a Piezo-Flexomagnetic Nanobeam Based on an Analytical-Numerical Solution, Nanomaterials, 2020, vol. 10(9). https://doi.org/10.3390/nano10091762
Koochi, A., Goharimanesh, M., and Gharib, M.R., Nonlocal Electromagnetic Instability of Carbon Nanotube-Based Nano-Sensor, Math. Meth. Appl. Sci., 2021. https://doi.org/10.1002/mma.7216
Koochi, A., Abadian, F., Rezaei, M., and Abadyan, M., Electromagnetic Instability of Electromechanical Nano-Bridge Incorporating Surface Energy and Size Dependency, Physica E. Low-Dimens. Syst. Nanostruct., 2021. https://doi.org/10.1016/j.physe.2021.114643
Koochi, A., Abadyan, M., and Gholami, S., Electromagnetic Instability Analysis of Nano-Sensor, Eur. Phys. J. Plus., 2021. https://doi.org/10.1140/epjp/s13360-020-01041-z
Zhang, Y. and Pang, J., Laplace-Based Variational Iteration Method for Nonlinear Oscillators in Microelectromechanical System, Math. Meth. Appl. Sci., 2020. https://doi.org/10.1002/mma.6883
Qian, Y.H., Pan, J.L., Qiang, Y., and Wang, J.S., The Spreading Residue Harmonic Balance Method for Studying the Doubly Clamped Beam-Type M/NEMS Subjected to the Van der Waals Attraction, J. Low Freq. Noise Vib. Act. Control, 2019, vol. 38(3–4), pp. 1261–1271. https://doi.org/10.1177/1461348418813014
Fu, Y., Zhang, J., and Wan, L., Application of the Energy Balance Method to a Nonlinear Oscillator Arising in the Microelectromechanical System (MEMS), Curr. Appl. Phys., 2011, vol. 11, pp. 482–485. https://doi.org/10.1016/j.cap.2010.08.037
He, J.H., Anjum, N., and Skrzypacz, P., A Variational Principle for a Nonlinear Oscillator Arising in the Microelectromechanical System, J. Appl. Comput. Mech., 2021, vol. 7(1), pp. 78–83. https://doi.org/10.22055/JACM.2020.34847.2481
Sedighi, H.M., Reza, A., and Zare, J. Using Parameter Expansion Method and Min-Max Approach for the Analytical Investigation of Vibrating Micro-Beams Pre-Deformed by an Electric Field, Adv. Struct. Eng., 2013, vol. 16(4), pp. 693–699. https://doi.org/10.1260/1369-4332.16.4.681
Sedighi, H.M. and Shirazi, K.H., Vibrations of Micro-Beams Actuated by an Electric Field Via Parameter Expansion Method, Acta Astronaut., 2013, vol. 85(C), pp. 19–24. https://doi.org/10.1016/j.actaastro.2012.11.014
Sadeghzadeh, S. and Kabiri, A., Application of Higher Order Hamiltonian Approach to the Nonlinear Vibration of Micro Electro Mechanical Systems, Lat. Am. J. Solids Struct., 2016, vol. 13, pp. 478–497. https://doi.org/10.1590/1679-78252557
Kuang, J.H. and Chen, C.J., Adomian Decomposition Method Used for Solving Nonlinear Pull-In Behavior in Electrostatic Micro-Actuators, Math. Comp. Model., 2005, vol. 41, pp. 1479–1491. https://doi.org/10.1016/j.mcm.2005.06.001
Sedighi, H.M. and Daneshmand, F., Nonlinear Transversely Vibrating Beams by the Homotopy Perturbation Method with an Auxiliary Term, J. Appl. Comput. Mech., 2015, vol. 1(1), pp. 1–9. https://doi.org/10.22055/jacm.2014.10545
Tian, D., Ain, Q.T., Anjum, N., He, C.H., and Cheng, B., Fractal M/NEMS: From Pull-In Instability to Pull-In Stability, Fractals, 2020, vol. 29(2). https://doi.org/10.1142/S0218348X21500304
Sedighi, H.M., Ouakad, H.M., Dimitri, R., and Tornabene, R., Stress-Driven Nonlocal Elasticity for the Instability Analysis of Fluid-Conveying C-BN Hybrid-Nanotube in a Magneto-Thermal Environment, Physica Scripta, 2020, vol. 95(6), p. 065204. https://doi.org/10.1088/1402-4896/ab793f
Sedighi, H.M., Daneshmand, F., and Yaghootian, A., Application of Iteration Perturbation Method in Studying Dynamic Pull-In Instability of Micro-Beams, Lat. Am. J. Solids Struct., 2014, vol. 11(7), pp. 1078–1090. https://doi.org/10.1590/S1679-78252014000700002
Sedighi, H.M. and Shirazi, K.H., Vibrations of Micro-Beams Actuated by an Electric Field Via Parameter Expansion Method, Acta Astron., 2013, vol. 85, pp. 19–24. https://doi.org/10.1016/j.actaastro.2012.11.014
He, J.H., Variational Iteration Method—A Kind of Non-Linear Analytical Technique: Some Examples, Int. J. Nonlinear Mech., 1999, vol. 34, pp. 699–708. https://doi.org/10.1016/S0020-7462(98)00048-1
Tao, Z.L., Chen, G.H., and Chen, Y.H., Variational Iteration Method with Matrix Lagrange Multiplier for Nonlinear Oscillators, J. Low Freq. Noise Vib. Act. Control, 2019, vol. 38(3–4), pp. 984–991. https://doi.org/10.1177/1461348418817868
Hashemi, G. and Ahmadi, M., On Choice of Initial Guess in the Variational Iteration Method and Its Applications to Nonlinear Oscillator, Proc. Inst. Mech. Eng. E. J. Process Mech. Eng., 2016, vol. 230(6), pp. 452–463. https://doi.org/10.1177/0954408915569331
Koochi, A., Farrokhabadi, A., and Abadyan, M., Modeling the Size Dependent Instability of NEMS Sensor/Actuator Made of Nano-Wire with Circular Cross-Section, Microsystem Technol., 2015, vol. 21, pp. 355–364. https://doi.org/10.1177/0954408915569331
Farrokhabadi, A., Mokhtari, J., Koochi, A., and Abadyan, M., A Theoretical Model for Investigating the Effect of Vacuum Fluctuations on yhe Electromechanical Stability of Nanotweezers, Ind. J. Phys., 2015, vol. 89, pp. 599–609. https://doi.org/10.1007/s12648-014-0619-y
Rastegar, S., Ganji, B.A., Varedi, M., and Erza, M., Application of He’s Variational Iteration Method to the Estimation of Diaphragm Deflection in MEMS Capacitive Microphone, Measurement, 2011, vol. 44, pp. 113–120. https://doi.org/10.1016/j.measurement.2010.09.028
Khuri, S.A. and Sayfy, A., Generalizing the Variational Iteration Method for BVPs: Proper Setting of the Correction Functional, Appl. Math. Lett., 2017, vol. 68, pp. 68–75. https://doi.org/10.1016/j.aml.2016.11.018
Anjum, N., Suleman, M., He, J.H., Lu, D., and Ramzan, M., Numerical Iteration for Nonlinear Oscillators by Elzaki Transform, J. Low Freq. Noise Vib. Act. Control, 2019. https://doi.org/10.1177/1461348419873470
Nawaz, Y., Arif, M.S., Bibi, M., Naz, M., and Fayyaz, R., An Effective Modification of He’s Variational Approach to a Nonlinear Oscillator, J. Low Freq. Noise Vib. Act. Control, 2019, vol. 38, pp. 1013–1022. https://doi.org/10.1177/1461348419829372
Rehman, S., Hussain, A., Rahman, J.U., and Anjum, N., Modified Laplace Based Variational Iteration Method for the Mechanical Vibrations and Its Applications, Acta Mech. Autom., 2022, vol. 16(2), pp. 98–102. https://doi.org/10.2478/ama-2022-0012
Nadeem, M. and Li, F.Q., He–Laplace Method for Nonlinear Vibration Systems and Nonlinear Wave Equations, J. Low Freq. Noise Vib. Act. Control, 2019, vol. 38(3–4), pp. 1060–1074. https://doi.org/10.1177/1461348418818973
He, K., Nadeem, M., Habib, S., Sedighi, H.M., and Huang, D., Analytical Approach for the Temperature Distribution in the Casting-Mould Heterogeneous System, Int. J. Numer. Meth. Heat Fluid Flow, 2021. https://doi.org/10.1108/HFF-03-2021-0180
Suleman, M., Lu, D., Yue, C., Rahman, J.UI, and Anjum, N., He–Laplace Method for General Nonlinear Periodic Solitary Solution of Vibration Equations, J. Low Freq. Noise Vib. Act. Control, 2018, vol. 38(3–4), pp. 1297–1304. https://doi.org/10.1177/1461348418816266
Anjum, N. and He, J.H., Nonlinear Dynamic Analysis of Vibratory Behavior of a Graphene Nano/Microelectromechanical System, Math. Meth. Appl. Sci., 2020. https://doi.org/10.1002/mma.6699
Funding
The work was performed within Taif University researchers supporting project No. TURSP-2020/16.
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated from Fizicheskaya Mezomekhanika, 2023, Vol. 26, No. 1, pp. 5–14.
Rights and permissions
About this article

Cite this article
Anjum, N., He, JH., He, CH. et al. Variational Iteration Method for Prediction of the Pull-In Instability Condition of Micro/Nanoelectromechanical Systems. Phys Mesomech 26, 241–250 (2023). https://doi.org/10.1134/S1029959923030013
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S1029959923030013