
Abstract
Currently, more than 60 units of generating equipment for power plants are involved in standardized primary frequency control (SPFC). The active power of such power units or turbines should vary in proportion to the deviations of the network frequency (turbine rotation speed) with certain dynamic characteristics. For the objectivity of assessing the quality of power plants' participation in the SPFC, nine criteria were formulated, for which mathematical algorithms were developed. One of the important criteria that is used for automatic control of the participation of power plants in the SPFC is the assessment of the actual values of the “deadband” and statism of the primary regulation. In practice, when using the existing algorithm to determine the values of the deadband and statism of the primary regulation, an incorrect result is often obtained. Incorrect calculation results lead to economic losses of power plants participating in the SPFC and inadequate assessment of the technical state of turbine control systems. The article discusses the existing methodology for assessing the actual values of statism and deadband of the primary regulation of generating equipment when operating in normalized primary frequency regulation. The assumptions used in its development and leading to an additional error of the method are analyzed, for example, that the actual static characteristic is symmetrical relative to zero. Examples of incorrect calculations obtained using the existing methodology are given. An alternative method for evaluating these parameters of primary regulation, which allows them to be more accurately and objectively evaluated, is proposed and it is compared with the existing methodology. A description of the calculation algorithm using an alternative method is given, its features and advantages are considered, including the absence of restrictions on the amount of initial data. Comparative graphs and data of estimates of the actual values of the deadband and statism of primary regulation, obtained using the considered algorithms, for various equipment involved in the normalized primary regulation of frequency are presented. It is shown that the values obtained using the proposed algorithm more adequately characterize the actual dependence of the generating equipment’s active power on changes in the network frequency, which makes it possible to obtain more representative and adequate data in comparison with the results of calculations using the existing methodology and, accordingly, to give an objective assessment of the generating equipment’s operation.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
One of the main ways to ensure the balance of electricity between its production and consumption is primary control—automatic change in the active power of the generating equipment when the network frequency changes. In Russia, primary control, carried out by equipment on which a reserve for changing the active power is specially set and maintained, is called standardized primary frequency control (SPFC) [1]. The generating equipment of power plants participating in the SPFC must respond to network frequency deviations exceeding 20 MHzFootnote 1 proportional to the change in active power with certain dynamic characteristics and meet the specified requirements formalized for objective assessment in the form of nine algorithmic criteria and having a mathematical description [2–4]. In this case, for example, are estimated inconsistency in the discreteness of recording measurements, lack of an adequate or proper response to changes in power with frequency deviations, the presence of power fluctuations, etc.
One of the important criteria that is used for automatic control of power plants’ participation in the SPFC is the assessment of the actual values of the deadband and droop of the primary control. In the control system, the deadband of primary control is called rated (installed) value of the frequency’s deviation from the nominal value at which no primary control is required. The minimum value of the deadband of the primary control corresponds to the deadband. Primary control droop is the coefficient that determines the dependence of the change in active power on the change in frequency. When working in the SPFC, the value of the deadband should not exceed 20 MHz, the droop of the primary control should be equal to 5% [1, 2].
At present, when monitoring the operation of equipment in the SPFC, to assess the actual values of droop and deadband of primary control, a statistical method with the establishment of violation measures is used. Droop and deadband are defined as parameters of the regression function between frequency deviations Δf and deviations of equipment power ΔP. The regression function in this case displays the dependence of the conditional mathematical expectation ΔP from Δf and defines a regression model that reflects the static characteristics of the primary control of equipment [2–4]. The measure of violation is a certain numerical scalar function calculated on a time interval depending on the initial data [3, 4]. When evaluating the actual values of droop and deadband, the violation measures are deviations in modulus of the values calculated by the statistical method from the required ones.
The following data sets are used as the initial information for assessing the actual values of droop and the deadband of primary control depending on time:
1. turbine rotor speed \(f = \left\{ {{{f}_{i}},\,\,i = 1,...,n} \right\},\) Hz;
2. actual power of the power unit/turbine \({{P}_{{{\text{act}}}}} = \) \(\left\{ {{{P}_{{{\text{act}}{\text{.}}i}}},\,\,i = 1,...,n} \right\},\) MW; and
3. given planned turbine power \({{P}_{{{\text{sch}}}}} = \) \(\left\{ {{{P}_{{{\text{sch}}.i}}},\,\,i = 1,...,n} \right\},\) MW.
In addition, you need to know:
1. rated (installed) power of the power unit/turbine \({{P}_{{{\text{nom}}}}},\) MW;
2. required (installed in the control system) value of the deadband of primary control \({\text{D}}{{{\text{B}}}_{{{\text{req}}}}},\) Hz (as a rule, no more than ±0.02 Hz [2]);
3. the required (set in the control system) value of the droop of the primary control \({{S}_{{{\text{req}}}}},\) % (usually 5% [2]); and
4. tolerances for deadband estimates \({{{{\varepsilon }}}_{{{\text{d}}{\text{.b}}}}},\) Hz, and statism \({{{{\varepsilon }}}_{S}},\) % of required values (specified parameters of the calculation algorithm).
Block diagram of the algorithm for evaluating the actual values of droop and deadband of primary control using the existing method is shown in Fig. 1 [2–4].

Block diagram of the algorithm “Inconsistency of the deadband and droop with the required values” using the existing methodology. x is frequency deviation; y is deviation of the actual power from the planned; RHO is the correlation coefficient between x and y; S is droop; DBsc, Ssc are estimated value of deadband and statism.
In practice, when determining the values of the deadband and droop of the primary control using the existing algorithm (see Fig. 1), an incorrect result is often obtained. For example, they are presented in Fig. 2 as a set of values of relative changes in power ΔP, % of the rated power of the power unit Rnom (hereinafter %), depending on (1) the relative changes in the network frequency Δf and (2) the calculated static characteristic built using the existing algorithm to determine the actual values of the deadband and droop of the primary control. The graphs are given for the combined cycle power unit no. 1 of Syzran CHP for January 11, 2020, and steam power unit no. 3 of Iriklinskaya GRES for February 17, 2020. Using the existing algorithm for the power unit of the Syzran TPP, estimates of droop of 1.5% and deadband ± 0.069 Hz were obtained, for Iriklinskaya GRES, respectively 3.3% and ± 0.024 Hz. At the same time, it is clearly seen from Figs. 1 and 2 that the parameters of the primary control of power units are determined incorrectly: the actual values of the deadband are significantly less, and the droop values are greater than those calculated using the algorithm.

Assessment of the actual values of the deadband and droop of (a) power unit nos. 1 of Syzran CHP and (b) no. 3 of Iriklinskaya GRES.
It should be noted that the participation of TPP equipment in the SPFC is carried out within the market of services for ensuring system reliability (system services) of the UES of Russia, i.e., participation in the SPFC is a service paid by SO UES [5]. If there is a discrepancy between the power change and the established requirements, the cost is the nonpayment of services for 1 h during which it was recorded. But if a discrepancy is recorded for the droop and deadband of primary regulation to the required values, then services are not paid for the day (24 h) when the discrepancy was recorded [2]. Incorrect results obtained by calculations using an existing algorithm lead to economic losses of TPPs participating in the SPFC (nonpayment for services for 24 h) and inadequate assessment of the turbine control systems' technical state.
VTI has developed and tested an alternative method allowing one to take into account the shortcomings of the existing algorithm more accurately and to objectively estimate the values of droop and deadband of primary control. The same data arrays are used as the initial information for the VTI technique depending on time (f, Rpl, Rfact), which are used to calculate the relative vectors x (frequency deviation from the nominal value 50 Hz) and y (power deviations from the planned target Rpl i):
Further, the frequency deviation vector x breaks into N intervals (vectors) in the range from the minimum xmin to the maximum xmax values. To ensure the accuracy of calculations, the values xmin, xmax, and N should be determined in such a way that the width of the interval does not exceed 1.5 MHz and the number of points in the interval provides the required accuracy.
For each interval, calculate the average value of the power deviation My (average value of all points falling into the interval) by expression
where n is the number of points in the interval from 1 to N; j = 1,…, n…
Thus, new data vectors are obtained xav and yav containing N values. Wherein yav contains the average values of points in each interval, xav contains the value of the middle of each interval.
Next, graphical dependencies of the previously obtained values of yi from xi are plotted in the form of a set of points (“clouds”) and a graph of average values of yav from xav. For the left and right parts of the graph, auxiliary straight lines are drawn at two points. The first point used for construction has the same coordinates for the left and right lines and is the center of the set with coordinates M[xi], M[yi] (here M is expected value). The second points through which the auxiliary lines are drawn are located on the graph of average values and are distant from xmin and xmax, specified when dividing into intervals, by 14% of the width of the dividing range, rounded to the nearest point xav i. The value of 14% was obtained empirically.
Thus, auxiliary lines must be constructed
where
here o1 and o2 are numbers of intervals lagging behind the boundaries of the split by 14% of the width of the split range.
Between o1 and o2 for the left and right parts of the graph, at each interval, the distances between a point on the constructed line and the point of average values are determined. Value xav i, for which the distance between the straight line and the mean values is maximum, can be considered an estimated value of the boundary of the deadband of the primary control.
Further, for the left and right parts of the graph, the droop values of the primary control are calculated at a distance from the edges of the division boundaries by 3, 6, and 10% of the width of the division range according to the formula
where x1 and y1 are values at intervals close to the first; x2 and y2 are values at intervals close to the interval at which the border of the deadband is located.
For convenience it is better to define x2 and y2 at an interval located from the border of the deadband at a distance of 5% of the width of the split range.
Based on the obtained estimated values of droop and deadband, it is possible to construct a piecewise-linear graph of the “estimated” static characteristic. In Fig. 3 is an example illustrating the plotting of averages y and x and estimates of the deadband and droop of the primary control—the “estimated” static characteristic.

Averages plotted from (1) multiple points yi and xi and (2) “estimated” static characteristic. DB1, DB2 are left and right boundaries of the deadband; max1, max2 are maximum distances between the auxiliary line 3 and a plot of average values within the division range, the coordinates of which along the abscissa determine the boundaries of the deadband; S3, S6, S10 are points at a distance from the border of the split range, equal to 3, 6 and 10% of the range width; S5 is a point at a distance from the border of the deadband, equal to 5% of the range width.
It should be noted that the proposed algorithm makes it possible to determine the deadband and droop of the primary control separately for negative and positive frequency deviations (decrease and increase in frequency relative to the nominal value). The existing methodology assumes that the actual static characteristic of the equipment is symmetrical relative to zero. In practice, as a rule, it is shifted to the left or right and has different values of droop and boundaries of the deadband of the primary control for the left and right parts. This is due to the fact that the change in the active power of the equipment with increasing and decreasing frequency occurs in different ways. On the one hand, this is caused by different dynamic properties of the equipment, and this is more important for steam power equipment than for combined cycle plants; on the other hand, it is due to the peculiarities of the static characteristics and tuning parameters of control systems of specific turbines.
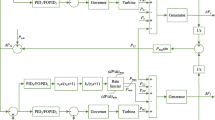
In Fig. 4 as an example, there is a block diagram of the algorithm for finding the yav and xav, with the help of which, according to a specially created program, the values of the deadband and statism of the primary regulation can be automatically estimated. In this case, the calculation results can be assessed visually by comparing them with the theoretical (specified) graph of the static characteristic. The data generated at power plants and transmitted to SO UES to assess their participation in the SPFC are used as initial information.

Block diagram of the algorithm for finding the mean values. ∆ is the width of one interval; i—iteration number; yint—the sum of power deviations within one interval; m—parameter of the power deviation meter within one interval; j—iteration number; k—algorithm parameter for stopping the counter.
Example graphs for estimates of the actual values of the deadband and droop of primary control, obtained using the algorithms used in SO UES and developed at VTI, are shown in Fig. 5. Table 1 shows the values of droop and deadband of primary control obtained by the existing methodology and methodology of VTI for the characteristics shown in Fig. 5. It is clearly seen that the values obtained using the algorithm proposed by the specialists of VTI more adequately characterize the actual dependence of the active power of the generating equipment on changes in the network frequency, which allows an objective assessment of the operation of the generating equipment.

Assessment of droop and deadband at (a, b) power unit no. 2 of Karmanovskaya GRES for March 20, 2016, and at the (c, d) power unit no. 3 of Permskaya GRES for March 12, 2016, using the (a, c) existing algorithm and the (b, d) VTI algorithm. 1—Relative to the change in power; 2, 4—calculated static characteristic for definitions of actual deadband and droop primary regulation values; 3—average relative change of power.
The VTI algorithm uses averaging over frequency and power. This ensures the “stability” of the calculation to constant random changes in frequency and makes it possible to obtain more representative and adequate data in comparison with the results of calculations using the existing method.
Features of the VTI technique are
1. The ability to select the boundaries of the frequency deviation range in order to exclude single deviations that can distort the assessment of droop and deadband.
2. Sequential calculation of the values of the deadband and droop of the primary control, which makes it possible to exclude the influence of frequency deviations lying within the obtained value of the deadband of the primary control on the estimation of the droop.
3. Separate calculation of the values of the border of the deadband and droop of the primary control for cases of decrease and increase in the network frequency. This makes it possible to take into account the different dynamic characteristics of the equipment when increasing and decreasing active power.
4. The result does not depend on the volume (temporal characteristics) of the original data.
It is recommended to use the existing methodology if data (turbine rotor speed and active power) are available for at least 18–24 h. The VTI technique allows us to obtain adequate and representative results in the presence of initial information in 2–3 h.
CONCLUSIONS
(1) The existing methodology for assessing the droop and the deadband of primary control when controlling the participation of generating equipment in the SPFC has drawbacks, which quite often lead to incorrect results. A significant error of the methodology is due, for example, to the use of the regression function in the calculation of smoothing as well as the assumption that the actual static characteristic is symmetric relative to zero.
(2) The specialists of VTI have developed an alternative method for calculating the actual values of droop and deadband of primary control. The values obtained using the algorithm proposed by the specialists of VTI more adequately and representatively characterize the actual dependence of the active power of the generating equipment on changes in the network frequency. This allows us to give an objective assessment of the operation of generating equipment.
Notes
All other generating equipment in Russia operates in general primary frequency control and must respond to network frequency deviations exceeding ±75 MHz (for combined cycle plants ±50 MHz).
REFERENCES
GOST R55890-2013. United Power System and Isolated Power Systems. Operative-Dispatch Management. Frequency Control and Control of Active Power. Norms and Requirements (Standartinform, Moscow, 2014).
The Procedure for Determining the Volume of Services Rendered by Rated Primary Frequency Regulation, Supplement No. 2 (Sist. Oper. EES, Moscow, 2020) [in Russian].
A. E. Efimov and V. Yu. Krylov, “Participation control criteria algorithms of power generating units of thermal power plants in standardized primary frequency control. Part 1,” Elektr. Stn., No. 11, 30–35 (2014).
A. E. Efimov and V. Yu. Krylov, “Participation control criteria algorithms of power generating units of thermal power plants in standardized primary frequency control. Part 2,” Elektr. Stn., No. 12, 12–17 (2014).
N. V. Zorchenko, A. G. Chaplin, O. V. Rad’kova, and T. G. Tyupina, “Primary frequency control and frequency control market development trends,” Elektr. Stn., No. 5, 31–34 (2020).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Nikiforov, A.A., Chaplin, A.G. & Zorchenko, N.V. Methodology for Determining the Actual Values of Droop and Deadband for Primary Control of TPP Equipment. Therm. Eng. 68, 647–653 (2021). https://doi.org/10.1134/S0040601521050086
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S0040601521050086