
Abstract
The review summarizes the theoretical and numerical results of analysis of the dispersion equation of standing waves on the surface of a viscous liquid published by L.N. Sretensky in 1941. A mechanism for the viscous regularization of wave motion is proposed, according to which the effects observed in the experiment are associated with the presence of a short-wavelength cutoff region, where viscous dissipation becomes the predominant factor and short-wavelength perturbations responsible for the breaking of a standing wave are suppressed.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 INTRODUCTION
The problem of the damping of gravity–capillary waves on the surface of an infinitely deep liquid were first formulated in [1, 2] more than a century ago; the classic solutions for low and high viscosity are generalized in a monograph by Lamb [3].
In 1941, L.N. Sretensky published the results of a study of standing waves on the surface of a heavy viscous liquid [4]. The solution of the dispersion equation presented in [4] is true for a liquid with an arbitrary viscosity and had a whole series of very interesting consequences. As is emphasized in [5], “the value of this work consists not only in obtaining a series of interesting results of physical nature. Already in the early 19th century, G. Lamb brought to notice the possibility of representing a velocity field in the form of the superposition of potential and purely solenoidal fields. In the work by Sretensky, this viewpoint is sequentially carried out, the efficiency of such a representation is shown, and its justification is given.”
The division of the velocity field of a liquid to the potential and solenoidal parts was used in [6, 7] when solving the problems of waves in a viscous liquid confined to the consideration of limiting viscosity cases.
The works [8, 9] should be especially noted, in which a finite depth of a viscous liquid was taken into account when considering gravity–capillary waves. This leads to a two-parameter dispersion equation.
Lagrange variables are used in [10] for the description of three-dimensional standing waves in a viscous liquid with an infinite depth, and the asymptotics of the dispersion equation are presented.
Then, as the generalization of the results of [4], the dispersion properties of linear gravitational standing waves on the surface of a viscous liquid with infinite depth are considered; experimental data are presented [11, 12] which qualitatively confirm the main provisions [4].
2 DISPERSION EQUATION
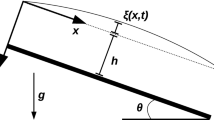
The task of studying the small wave motions of a heavy viscous liquid with an infinite depth in the absence of any stresses on the free surface is set. The two-dimensional oscillations of the liquid are described in the Cartesian system of coordinates (x, y) with the origin on the unperturbed surface; the y axis is vertical.
The linearized Navier–Stokes equations and continuity equation are as follows:
Here, ρ, ν, and g are the density, kinematic viscosity, and acceleration of gravity, respectively.
If the motion of the viscous liquid is presented as
it follows from (2.1) that the function φ obeys the Laplace equation, and ψ, the thermal conductivity equation:
In this case the potential part φ of the motion of the liquid is completely separated from its vortex part ψ.
Let the small displacements of the free surface be defined by the function
Then problem (2.3), (2.4) is enclosed by boundary conditions on the free surface y = 0: the kinematic condition and conditions of equality to zero of the tangential and normal stresses:
Taking into account correlations (2.2), we obtain the following boundary conditions of problem (2.3), (2.4):
The following expression is true for the free surface:
Therefore, the problem of the determination of standing waves on the surface of a boundless viscous liquid is reduced to the solution of boundary problem (2.3)–(2.6). We search for solutions in the following form:
where k and m are certain constants and A and B are unknown temporal functions.
Since ψ obeys thermal-conductivity equation (2.4),
Integrating the last equation, we obtain
where ω* = ν(k2 – m2) = b + iω is the complex oscillation frequency of the liquid and B0 is the integration constant.
We find the function A(t) upon substituting φ and ψ to boundary condition (2.6):
Then,
Substituting (2.9) and (2.10) to boundary condition (2.5), we obtain
If we introduce new variables \((\vartheta ,\zeta )\) by the formulas
(2.10) takes on the form
Equation (2.13) ties the variables (ϑ, ζ), defining the dependence between the length of the standing wave and its frequency. If the pair of values of (ϑ, ζ) is known, the length of the standing wave λ and quantity ω* characterizing the temporal changes in the wave process are found as follows:
We note that the problem under consideration is characterized by two spatial scales, namely, the length of the standing wave \(\lambda = 2\pi {\text{/}}k\) and Stokes viscous scale \({{\delta }_{\nu }} = \sqrt {\nu {\text{/}}{{\omega }_{0}}} \). The ratio of these scales \(\vartheta = 4\pi {}^{2}{{({{\delta }_{\nu }}{\text{/}}\lambda )}^{2}}\) in particular determines the different modes of wave motion of a viscous liquid.
3 SOLUTION OF THE DISPERSION EQUATION
In [4], dispersion equation (2.13) was numerically solved by the Gräffe method (squaring of the roots of a polynomial). Tables are presented [4] for the range of values of 0.06 ≤ \(\vartheta \) ≤ 10 which include the values of the complex roots of Eq. (2.13) and corresponding estimates for the frequency and damping coefficient of standing waves. In this work, the numerical solution of (2.13) was performed using the standard procedures of the Mathematica software package. We note the high accuracy of the performed [4] calculations: comparison of the calculated values showed coincidence with an accuracy of up to 10–3.
The roots \({{\zeta }_{1}},{{\zeta }_{2}},{{\zeta }_{3}}\), and \({{\zeta }_{4}}\) of Eq. (2.13) can be determined for each specific value of θ. Out of these four roots, two roots were neglected because the value of m corresponding to them
has a negative real part which contradicts the exponential damping of vorticity with depth.
The roots of Eq. (2.13) at 0.0001 ≤ \(\vartheta \) ≤ 1.7 which have a physical sense are shown in Fig. 1. The dependences \(\zeta (\vartheta )\) are presented in Fig. 2, in which the arrows mark the value of ϑ = 1.31. Below this value, we have a pair of complex conjugate roots that correspond to the oscillatory damping mode; above it (ϑ > 1.31), the motion of a liquid has an aperiodic damping character.

Roots of Eq. (2.13) on the complex ζ plane at 0.0001 \( \leqslant \vartheta \leqslant \) 1.7.

Dependence of the complex root ζ of the dispersion equation on the parameter ϑ: (a) Imζ and (b) Reζ. The arrow marks the value of ϑ = 1.31.
Let us perform the analysis of the data presented in Fig. 2 in accordance with the limiting estimates [3, 8].
In the case of long waves, i.e., at \(\vartheta \ll 1\), the right part of (2.13) can be equated to zero, and the corresponding roots are
or, taking into account (2.12),
Any sign can be chosen for the root or frequency because it only affects the phase of the wave. Therefore, the viscosity of a liquid does not affect the frequency of the wave in the long-wavelength limit.
At ϑ > 1.31, we have two roots, ζ1 and ζ2, which correspond to aperiodic damping (branches 1 and 2 in Fig. 2b). Their approximate values are
The corresponding damping coefficients are
The performed estimates [8] show for ζ1 equal contributions from the potential φ and vortex ψ parts of motion of the liquid to aperiodic damping. Overall, the motion of a viscous liquid is determined by the initial deformation of its free surface and slow recovery to the horizontal unperturbed state.
In the case of the second root ζ2, fast damping of the initial perturbations is associated with the predominance of the vortex part of motion [8].
To represent the dispersion dependences ω*(λ) of standing waves on the surface of a liquid with different viscosities, we introduce a dimensionless complex frequency and a dimensionless wavelength:
The dispersion curves in these variables are presented in Fig. 3.

(a) Dependences of the dimensionless (1) frequency and (2) damping coefficient on the length of a standing wave and (b) damping coefficient in the vicinity of the critical value of the parameter ϑ = 1.31, i.e., transition from the (2) damping oscillations to the (3, 4) aperiodic regime.
Curve 1 in Fig. 3a corresponds to the dependence of the frequency of a standing wave ImΩ* on its length λ*. It is seen that the frequency steadily grows with decreasing length, reaches a maximum of ImΩ* = 0.546 at λ* = 1.898, and then quickly decreases to zero at λ* = 0.833. No periodic motions of a viscous liquid exist below this value. Therefore, the critical value of the wavelength \(\lambda _{{\operatorname{cr} }}^{*}\) = 0.833 sets the short-wavelength limit of existence of gravitational waves on the free surface of a liquid, below which standing waves are absent.
Curves 2 in Figs. 3a and 3b correspond to the dependence of the damping coefficient ReΩ* of a standing wave on its length λ*. Monotonic growth is characteristic for it, and the dimensionless damping coefficient amounts to ReΩ* = 0.758 at \(\lambda _{{\operatorname{cr} }}^{*}\) = 0.833. Curves 3 and 4 in Fig. 3b determine the aperiodic damping: the corresponding roots ζ1 and ζ2 of dispersion Eq. (2.13). With a decrease in λ* < 0.833, the dimensionless damping coefficient ReΩ* either drops to zero (curve 3) or increases to infinity (curve 4).
4 APPLICATION OF THE ANALYSIS RESULTS IN THE EXPERIMENT
It has been found in the experiments [11, 12] that a 50-fold increase in the kinematic viscosity of a liquid in comparison with water fundamentally changes the dynamics of wave motion. The regularization of standing gravitational waves with complete suppression of the process of their breaking in the form of a jet ejection from the crest and its subsequent decomposition is observed, Fig. 4.

(a) Breaking wave on the free surface of water (ν = 1 cSt) and (b) regular wave with a height of H = 12.6 cm on the surface of an aqueous solution of sugar (ν = 85.97 cSt): the frequencies of the waves ω = 10.10 s–1, the shooting speed is 30 frames/s, and the envelopes are obtained upon a superposition of 60 frames (three wave periods).
The regime of parametric excitation of the second mode (n = 2) of standing gravitational waves on the free surface of a liquid with a depth of h = 15 cm in a vertically oscillating rectangular vessel with the length L = 50 cm, width W = 4 cm, and height of 50 cm was used in the experiments [11, 12] on investigating the effect of viscosity on the intensive oscillations of a liquid. The observed two-dimensional wave motions can be considered as waves on the surface of deep water because \(\omega _{0}^{2}\) = gktanhkh ~ gk; here, λ = 50 cm and k = 2π/λ.
The mechanism of regularization of breaking waves (Fig. 4) cannot be explained by a simple increase in viscosity by two orders of magnitude. Indeed, experiments showed a fivefold increase in the damping coefficient, thus, bexp = 0.157 s–1 for water and 0.752 s–1 for a solution of sugar. However, the wave pattern shown in Fig. 4 was observed in the stationary regime of oscillations of water and a solution of sugar.
Let us consider the effect of the viscosity of a liquid on the dynamics of irregular and breaking waves (Fig. 5).

Sequences of the video frames illustrating the (a) process of the breaking of gravitational Faraday waves on the free surface of water and (b) regular wave mode on the surface of an aqueous solution of sugar (ν = 85.97 cSt) during the half-period of the wave; the time point is indicated in the upper left corner of the frame.
For water, the sequence of the frames reflecting the origin, development, and collapse of the cavity at the stage of crest formation in the central part of the vessel is presented in Fig. 5a. During the cavity–crest transition, the central part of the liquid moves upwards, and small-scale perturbations with sizes not exceeding 5 cm are seen in the wave profile in the range of 0.096–0.160 s. At t = 0.200 s, a formed cavity is observed in the middle of the wave profile, the subsequent collapse of which leads to a jet splash with droplet detachment.
At ν = 85.97 cSt, the wave profiles on the surface of a solution of sugar are absolutely smooth for the entire half-period (Fig. 5b). It is seen that the wave is nonlinear but regular, its profile has no small-scale perturbations and signs of breaking.
The only reason for the difference in the wave patterns in Fig. 5 is the viscosity of the working liquid. Increasing the viscosity of the oscillating liquid up to 85.97 cSt leads to complete suppression of the process of breaking and regularization of a standing wave: small-scale perturbations that lead to the formation of a collapsing cavity disappear. Therefore, the viscosity of the liquid is sort of a filter of short-scale perturbations.
To interpret the obtained experimental results, we use the results of the numerical analysis of dispersion Eq. (2.13) in the form of dependences ω(λ) and b(λ) (Fig. 6). The frequency of free standing gravitational waves on the surface of an infinitely deep ideal liquid (ν = 0) is determined by the correlation ω0 = (gk)1/2 and increases up to infinity in the case of decreasing the wavelength (Fig. 6a, curve 1). If we take into account the viscosity of the oscillating liquid, the wave frequency takes a zero value ω = 0 at a certain critical wavelength λcr. For water (curve 2), this value is λcr = 0.02 cm. Upon increasing the viscosity up to 16.24 cSt (a 52% solution of sugar), we have λcr = 0.15 cm (curve 3). For a 63% solution of sugar (curve 4), the critical wavelength is estimated as λcr = 0.44 cm.

Dependences ω(λ) and b(λ): ν = (1) 0, (2) 1, (3) 16.24, and (4) 85.97 cSt.
Therefore, there are critical values of the wavelength λcr which set the short-wavelength limit of the excitation of gravitational waves. At λ < λcr, the viscosity of the liquid completely suppresses any wave motion. Increasing the viscosity leads to an increase in this limit. This result confirms the experimental data on the viscous regularization of breaking standing waves and makes it possible to explain the absence of small-scale perturbations on the wave profiles of a viscous liquid by a short-wavelength cutoff. The underestimated (in comparison with the experimental) calculated values of λcr can be explained by the fact that the finite depth of the liquid as well as the viscous losses on the side walls and bottom of the vessel are not taken into account in the dispersion correlation (2.13).
If we take into account the surface tension of liquids and consider gravity–capillary waves, for which ω0 = (gk + σk3/ρ)1/2, dispersion Eq. (2.13) will remain unchanged, while the values of the critical wavelength for water and a 63% solution of sugar λcr = 4.8 × 10–6 and 0.04 cm turn out to be substantially lower than the corresponding values for gravitational waves.
Figure 6b presents the dependences of the damping coefficient on the wavelength for water (curve 2) and a solution of sugar (curve 4) obtained in the case of the numerical solution of (2.13). For these liquids, we have 0.0003 and 0.0246 s–1 for the second wave mode (λ = 50 cm), respectively. The dashed dependences in Fig. 6b have been calculated by the formula b = 2νk2 without taking into account the bottom and side walls. Due to this particular reason, the calculated values of the damping coefficient are substantially lower than the experimental values.
Therefore, it follows from (2.13) that the viscosity of a liquid in particular provides the cutoff of the short-wavelength perturbations responsible for the breaking of waves.
CONCLUSIONS
The theoretical and numerical results of analysis of the dispersion equation of standing waves on the surface of a viscous liquid published by Sretensky in 1941 have been generalized.
A mechanism for the viscous regularization of wave motion has been proposed, according to which the effects observed in the experiment are associated with the presence of a short-wavelength cutoff region, where viscous dissipation becomes a predominant factor, and the suppression of short-wavelength perturbations responsible for the breaking of a standing wave occurs.
REFERENCES
Bassett, A.B., A Treatise on Hydrodynamics, London: Deighton, Bell and Co., 1888, vol. 2, art. 519. Reprinted by New York: Dover, 1961.
Tait, P.G., Note on ripples in a viscous liquid, Proc. R. Soc. Edinburgh, 1890, vol. 17, pp. 110–114.
Lamb, H., Hydrodynamics, Cambridge: Univ. Press, 1932.
Sretenskii, L.N., On waves on the surface of a viscous fluid, Tr. TsAGI, 1941, no. 541, pp. 1–34.
Moiseev, N.N., Some questions of hydrodynamics of surface waves, in Mekhanika v SSSR za 50 let (Mechanics in the USSR for 50 Years), vol. 2: Mekhanika zhidkosti i gaza (Fluid Mechanics), Moscow: Nauka, 1970, pp. 55–78.
Levich, V.G., Physicochemical Hydrodynamics, Englewood Cliffs, N.J.: Prentice-Hall, 1962.
Wehausen, J.V. and Laitone, E.V., Surface waves, in Encyclopedia of Physics, Springer, 1960, vol. 9, pp. 446–778.
LeBlond, H.H. and Mainardi, F., The viscous damping of capillary-gravity waves, Acta Mech., 1987, vol. 68, nos. 3–4, pp. 203–222.
Sanochkin, Yu.V., Viscosity effect on free surface waves in fluids, Fluid Dyn., 2000, vol. 35, no. 4, pp. 599–604.
Abrashkin, A.A. and Bodunova, Yu.P., Spatial standing waves on the surface of viscous fluid, Tr. Nizhegorod. Gos. Tekh. Univ. im. R.E. Alekseeva, Mekh. Zhidk. Gaza, 2011, no. 2(87), pp. 49–54.
Bazilevskii, A.V., Kalinichenko, V.A., and Rozhkov, A.N., Effect of fluid viscosity on the Faraday surface waves, Fluid Dyn., 2018, vol. 53, no. 6, pp. 750–761.
Bazilevskii, A.V., Kalinichenko, V.A., and Rozhkov, A.N., Viscous regularization of breaking Faraday waves, JETP Lett., 2018, vol. 107, no. 11, pp. 684–689.
Funding
The study was supported by the Government program (contract # AAAA-A20-120011690131-7).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
We declare that we have no conflicts of interest.
Additional information
On the 120th Anniversary of the Birth of L. N. Sretensky
Translated by E. Boltukhina
Rights and permissions
About this article

Cite this article
Kalinichenko, V.A. Standing Gravity Waves on the Surface of a Viscous Liquid. Fluid Dyn 57, 891–899 (2022). https://doi.org/10.1134/S0015462822070059
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S0015462822070059