
Abstract
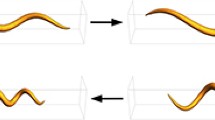
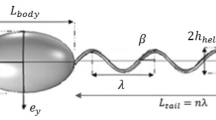
Bacteria with helical flagella show an ideal mechanism to swim at low Reynolds number. For application of artificial microswimmers, it is desirable to identify effects of structural and geometrical parameters on the swimming performance. In this study, a double-end helical swimmer is proposed based on the usual single-end helical one to improve the forward-backward motion symmetry. The propulsion model of the artificial helical microswimmer is described. Influences of each helix parameter on the swimming velocity and propulsion efficiency are further analyzed. The optimal design for achieving a maximum propulsion velocity of submillimeter scale swimmers is performed based on some constraints. An experimental setup consisting of three-pair of Helmholtz coils is built for the helical microswimmers. Experiments of microswimmers with several groups of parameters were performed, and the results show the validity of the analysis and design.
Article PDF
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
References
Nelson B J, Kaliakatsos I K, Abbott J J. Microrobots for minimally invasive medicine. Annual Review of Biomedical Engineering, 2010, 12, 55–85.
Chen B, Jiang S, Liu Y, Yang P, Chen S. Research on the kinematic properties of a sperm-like swimming micro robot. Journal of Bionic Engineering, 2010, 7, S123–S129.
Ha N S, Goo N S. Propulsion modeling and analysis of a biomimetic swimmer. Journal of Bionic Engineering, 2010, 7, 259–266.
Sitti M, Ceylan H, Hu, W, Giltinan J, Turan M, Yim S, Diller E. Biomedical applications of untethered mobile milli/microrobots. Proceedings of the IEEE, 2015, 103, 205–224.
Peyer K E, Tottori S, Qiu F, Zhang L, Nelson B J. Magnetic helical micromachines. Chemistry-A European Journal, 2013, 19, 28–38.
Ahmed D, Baasch T, Jang B, Pane S, Dual J, Nelson B J. Artificial swimmers propelled by acoustically activated flagella. Nano Letters, 2016, 16, 4968–4974.
He B, Wang Z, Liu C, Li Y, Shen R. Swimming behavior analysis based on bacterial chemotaxis in solution. Journal of Bionic Engineering, 2012, 9, 315–321.
Yang C, Chen C, Ma Q, Wu L, Song T. Dynamic model and motion mechanism of magnetotactic bacteria with two lateral flagellar bundles. Journal of Bionic Engineering, 2012, 9, 200–210.
Nain S, Sharma N N. Propulsion of an artificial nanoswimmer: A comprehensive review. Frontiers in Life Science, 2015, 8, 2–17.
Rao K J, Li F, Meng L, Zheng H, Cai F, Wang W. A force to be reck-oned with: A review of synthetic microswimmers powered by ultrasound. Small, 2015, 11, 2836–2846.
Belharet K, Folio D, Ferreira A. Three-dimensional controlled motion of a microrobot using magnetic gradients. Advanced Robotics, 2011, 25, 1069–1083.
Ishiyama K, Sendoh M, Yamazaki A, Arai K I. Swimming micro-machine driven by magnetic torque. Sensors and Actuators A, 2001, 91, 141–144.
Gao W, Feng X, Pei A, Kane C R, Tam R, Hennessy C, Wang J. Bioinspired helical microswimmers based on vascular plants. Nano Letters, 2014, 14, 305–310.
Ye Z, Régnier S, Sitti M. Rotating magnetic miniature swimming robots with multiple flexible flagella. IEEE Transactions on Robotics, 2014, 30, 3–13.
Yu T S, Lauga E, Hosoi A E. Experimental investigations of elastic tail propulsion at low Reynolds number. Physics of Fluids, 2006, 18, 091701.
Abbott J J, Peyer K E, Lagomarsino M C, Zhang L, Dong L X, Kaliakatsos I K, Nelson B J. How should microrobots swim? The International Journal of Robotics Research, 2009, 28, 1434–1447.
Zhang L, Abbott J J, Dong L X, Kratochvil B E, Bell D, Nelson B J. Artificial bacterial flagella: Fabrication and magnetic control. Applied Physics Letters, 2009, 94, 064107.
Xu T T, Hwang G, Andreff N, Régnier S. Modeling and swimming property characterizations of scaled-up helical microswimmers. IEEE/ASME Transactions on Mechatronics, 2014, 19, 1069–1079.
Purcell E M. Life at low Reynolds number. American Journal of Physics, 1977, 45, 3–11.
Lighthill J. Flagellar hydrodynamics. SIAM Review, 1976, 18, 161–230.
Gray J, Hancock G J. The propulsion of sea-urchin spermatozoa. Journal of Experimental Biology, 1955, 32, 802–814.
Purcell E M. The efficiency of propulsion by a rotating flagellum. Proceedings of the National Academy of Sciences of the United States of America, 1997, 94, 11307–11311.
Rodenborn B, Chen C H, Swinney H L, Liu B, Zhang H P. Propulsion of microorganisms by a helical flagellum. Proceedings of the National Academy of Sciences of the United States of America, 2013, 110, E338–E347.
Temel F Z, Yesilyurt S. Confined swimming of bio-inspired microrobots in rectangular channels. Bioinspiration & Biomimetics, 2015, 10, 016015.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Wang, L., Xu, H., Zhai, W. et al. Design and Characterization of Magnetically Actuated Helical Swimmers at Submillimeter-scale. J Bionic Eng 14, 26–33 (2017). https://doi.org/10.1016/S1672-6529(16)60375-X
Published:
Issue Date:
DOI: https://doi.org/10.1016/S1672-6529(16)60375-X