
Abstract
New energy electric vehicles will become a rational choice to achieve clean energy alternatives in the transportation field, and the advantages of new energy electric vehicles rely on high energy storage density batteries and efficient and fast charging technology. This paper introduces a DC charging pile for new energy electric vehicles. The DC charging pile can expand the charging power through multiple modular charging units in parallel to improve the charging speed. Each charging unit includes Vienna rectifier, DC transformer, and DC converter. The feasibility of the DC charging pile and the effectiveness of the control strategies of each component of the charging unit are verified by simulation and experimental results. This DC charging pile and its control technology provide some technical guarantee for the application of new energy electric vehicles.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In the background of the depletion of fossil energy and increasingly serious environmental pollution, the energy transformation of the traditional automotive industry has become an inevitable trend, and the new energy vehicles represented by electric vehicles(EV) will be the mainstream direction of the future development of the automotive industry [1,2,3].
New energy electric vehicles have the advantages of low noise, high efficiency, no pollution, zero emission, etc. It will become an ideal choice for transportation to achieve clean energy alternatives, the advantages of new energy electric vehicles rely on high energy storage density batteries and efficient and fast charging technology. Fast charging technology uses DC charging piles to convert AC voltage into adjustable DC voltage to charge the batteries of electric vehicles. The advantage of DC charging pile is that the charging voltage and current can be adjusted in real time, and the charging time can be significantly shortened when the charging current are large, which is a more widely used charging method at present.
Document [4] proposed standards for ultra-fast charging stations and types of fast charging methods are reviewed. Various power electronic topologies and the modular design approach used in ultra-fast charging are also discussed. Advanced control techniques for ultra-fast chargers.
In [5, 6], the rectifier of the DC charging pile is an uncontrollable rectifier. When the uncontrollable rectifier works, it will inject large harmonic current into the AC grid, the harmonic current will affect the service life of the input transformer, increase the power grid loss, and cause voltage fluctuation.
In [7], the rectifier of DC charging pile is three-phase two-level PWM rectifier, and the three-phase two-level PWM rectifier must be connected to an LC or LCL filter for filtering, otherwise the rectifier will inject a large harmonic current into the grid. Especially when the switching frequency of the rectifier is low, a larger value of reactance is required, which will lead to an increase in the size and cost of the rectifier. This rectifier is generally used in small and medium power applications.
In [8,9,10], the rectifier of the DC charging pile is a three-phase three-level rectifier. At the same switching frequency and power level, the three-level rectifier has smaller inductance and smaller reactor size, which reduces the size of the rectifier and thus increases the power density. The disadvantage of this rectifier is that the number of fully controlled switching devices is higher, so more power device drive signals are required, in addition to the need to consider the upper and lower bridge arm short circuit problem, for which additional dead time settings are required.
In [11,12,13], when DC charging piles use non-isolated DC/DC converters, the batteries are not electrically isolated from the grid, which has certain safety hazards. Considering the large power of the designed DC charging module, it is necessary to consider issues such as personal safety, so the DC/DC converter needs to be an isolated DC/DC converter.
This paper introduces a high power, high efficiency, wide voltage output, and high power factor DC charging pile for new energy electric vehicles, which can be connected in parallel with multiple modular charging units to extend the charging power and thus increase the charging speed. Each charging unit includes Vienna rectifier, DC transformer and DC converter.
The three-phase three-level Vienna rectifier is suitable for high-power applications, which can achieve the grid-side unit power factor, has a small impact on the power quality of the grid, has better dynamic regulation performance, and the voltage stress of the switching tubes is only half of the DC output voltage, and there is no straight-through problem of the upper and lower bridge arms, which can avoid short-circuit phenomenon caused by the straight-through problem and thus has higher safety and reliability. Document [14] proposed a new nonlinear controller for a battery electric vehicle (BEV) ultra-fast charger based on three-phase Vienna rectifier topology. The nonlinear controller has a faster tracking speed, higher quality of dynamic performance, and a total harmonic current distortion (THDi) less than 5% to meet the IEEE 519–2014 standard. Document [15] proposed a nonlinear control strategy for the Vienna rectifier with unbalanced input voltages. With this control method, the dynamic response of output voltage can be effectively accelerated and the dc bus capacitance can also be significantly reduced. Document [16] proposed an improved hybrid SMC-PDPC control scheme for Vienna rectifier, which uses lagrangian liner interpolation to predict the next sampling power value with eliminating inner-loop power errors. Document [17] proposed a new nonlinear control approach for thyristor-controlled series capacitors (TCSCs) to schedule TCSC line active power transfer, improving transient stability, and obtain acceptable voltage regulation performance of the power system. This control method for the TSCS has been presented based on synergetic control theory. The synergetic control theory can be used to solve the chattering problem of the sliding mode controller. Document [18] proposed a model-free predictive current control strategy based on adaptive super-twisting sliding mode observer (ASTSMO-MFPCC). This control strategy can effectively suppress the effects of system disturbances, and it has good robustness and dynamic steady-state performance. Document [19] proposed a double closed-loop control strategy with fixed switching frequency based on optimal vector synthesis of model predictive direct power control (DPMPC-CF) in the inner loop and sliding-mode control (SMC) control in the outer loop. The proposed DPMPC-CF has good steady-state and dynamic performance.
The isolation transformer in the DC transformer can realize the energy transmission between the high-voltage bus and the battery side, while ensuring a high degree of electrical isolation of the battery from the grid, which improves the system safety and reliability. In addition, the wide voltage output function can be realized through the transformation ratio of the transformer.
The DC converter uses three circuits in parallel to increase the total output current capability and reduce the total output current fluctuation through carrier phase shift control, and the smaller output current fluctuation can reduce the damage to the battery. The converter with three circuits connected in parallel has a certain degree of safety redundancy, so that if one or two of the circuits fail, the remaining circuits can still operate.
The DC charging pile adopts a modular design scheme, which is convenient for power expansion, and the power level can be increased by increasing the number of parallel charging units. The safety redundancy is high, when one or more of the charging units have problems, these problematic charging units can be stopped and the other charging units continue to operate normally.
The DC charging pile for new energy electric vehicles proposed in this paper has completed theoretical research, mathematical model building and analysis, simulation model building, and experimental platform building, verification and analysis, we need to further improve the hardware and software functions to perfect the performance of the DC charging pile.
2 Charging System and Main Circuit Topology
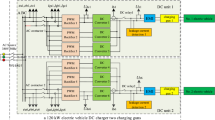
Figure 1 shows a block diagram of the DC charging pile system consisting of multiple modular charging units connected in parallel, wherein the DC charging pile includes quick fuses, SPD, AC switch, AC contactor, watt-hour meter, charging units, DC relay, DC switch, display screen and master control set(MCS).

Block diagram of the DC charging pile system
Figure 2 shows the charging unit consisting of a Vienna rectifier, a DC transformer, and a DC converter.

The charging unit consisting of a Vienna rectifier, a DC transformer, and a DC converter
In order to achieve high power and fast charging function, multiple charging units are operated in parallel. When one or more of the charging units have problems, these problematic charging units can be stopped and the other charging units continue to operate normally.
The working process of a single charging unit: First, the Vienna rectifier converts the three-phase 380 V AC power supply to 650 V DC power supply. Secondly, the 650 V DC power supply is converted to 600 V DC power supply by a high-frequency isolation transformer. Finally, the 600 V DC power supply charges the batteries of the electric vehicle by a DC converter.
3 Control Principle
3.1 Vienna Rectifier and its Control
In Fig. 2, Vienna rectifier converts three-phase 380 V AC power supply to 650 V DC power supply.
The Vienna rectifier has three advantages:
First, the input power factor is close to 1, and the grid-side current is sinusoidal, which greatly reduces the harmonic pollution on the grid-side.
Second, the voltage stress of the power switching tubes is only half of the DC bus voltage, so there is no straight-through problem of the upper and lower bridge arms, avoiding the short-circuit phenomenon caused by the straight-through problem.
Third, the Vienna rectifier allows for small size and high power density.
Vienna rectifier adopts a new double closed-loop control strategy combining PI control and sliding mode control, with the current loop using power inner loop PI control and the voltage loop using power outer loop sliding mode control(SMC).
The mathematical model of the Vienna rectifier on the d-q synchronous frame is expressed as
where Ugd and Ugq are the d-axis and q-axis components of the grid phase voltage Uga, Ugb and Ugc on the d-q synchronous frame, respectively. igd and igq are the d-axis and q-axis components of the grid phase current iga, igb and igc on the d-q synchronous frame, respectively. L is the filter inductance. R is the line resistance. C1 and C2 are the support capacitors of the upper and lower bridge arms, respectively. Udc1 and Udc2 are the support voltages of the upper and lower bridge arms, respectively. Udc is the DC bus voltage. Sdp and Sqp are the d-axis and q-axis components of the switching functions Sap, Sbp and Scp on the d-q synchronous frame, respectively. Sdn and Sqn are the d-axis and q-axis components of the switching functions San, Sbn and Scn on the d-q synchronous frame, respectively. RL is the load resistance. ω is the grid angular frequency.where C1 = C2, Udc = Udc1 + Udc2, (2) can be derived.
where hd = Sdp—Sdn, hq = Sqp—Sqn.
When the three-phase grid is balanced, according to the instantaneous power theory, the instantaneous active power P and reactive power Q can be obtained on d-q synchronous frame.
Due to the grid voltage phase-locked loop technique, Ugq = 0, (4) can be reduced to
Multiplying (2) left and right by Ugd at the same time, the power model of Vienna rectifier on the d-q synchronous frame can be obtained by combining (4) as
3.1.1 Design of Power Inner-Loop PI Controller
Equation (5) shows that there is a coupling phenomenon between P and Q, which can be decoupled by current decoupling method for P and Q, (6) can be obtained.
where \(u_{sd} = h_{d} U_{gd} {{U_{dc} } \mathord{\left/ {\vphantom {{U_{dc} } 2}} \right. \kern-0pt} 2}\), \(u_{sq} = h_{q} U_{gd} {{U_{dc} } \mathord{\left/ {\vphantom {{U_{dc} } 2}} \right. \kern-0pt} 2}\), Pref is the active power reference, Qref is the reactive power reference, kp and ki are the proportional and integral coefficients of PI controller, respectively.
Assume that Vd and Vq are the d-axis and q-axis components of the control voltage, respectively. \(V_{d} = {{u_{sd} } \mathord{\left/ {\vphantom {{u_{sd} } {U_{gd} }}} \right. \kern-0pt} {U_{gd} }} = h_{d} {{U_{dc} } \mathord{\left/ {\vphantom {{U_{dc} } 2}} \right. \kern-0pt} 2}\), \(V_{q} = {{u_{sq} } \mathord{\left/ {\vphantom {{u_{sq} } {U_{gd} }}} \right. \kern-0pt} {U_{gd} }} = h_{q} {{U_{dc} } \mathord{\left/ {\vphantom {{U_{dc} } 2}} \right. \kern-0pt} 2}\).
3.1.2 Design of Power Outer-Loop Sliding Mode Controller(SMC)
The voltage outer-loop controller using sliding mode control can be used to make the DC bus voltage stable and independent of the load current. The voltage outer-loop controller using sliding mode control also can be used to solve the control problem of the non-linear system of the Vienna rectifier, and the conflict between speed and overshoot of the output voltage is further solved. The two sliding mode surfaces with P and Q selected as variables are
Analyzing the sliding mode surface S1 of reactive power, when the Vienna rectifier operates at unit power factor, the reactive power is 0, (8) can be obtained.
Analyzing the sliding surface S2 of active power, assuming a balanced potential at the midpoint of the DC side and no losses in the line, (9) can be obtained.
where, Pac is the input power of the AC-side and Pdc is the output power of the DC-side. So that P = Pac = Pdc, (10) can be obtained.
Since the DC voltage Udc is directly controlled by the voltage outer-loop, the combination of Eq. (10) can change the sliding mode surface S2 to
where, K is the control coefficient, Udcref = constant, \({{{\text{d}}U_{dcref}^{2} } \mathord{\left/ {\vphantom {{{\text{d}}U_{dcref}^{2} } {{\text{d}}t}}} \right. \kern-0pt} {{\text{d}}t}} = 0\), combining (8) and (9), S2 can be obtained.
Combining (7) and (12), Pref can be obtained.
Figure 3 shows the control block diagram of the hybrid control of PI control and sliding mode control of the Vienna rectifier.

Control block diagram of the hybrid control of PI control and sliding mode control of the Vienna rectifier
3.2 DC Transformer and its Control
In Fig. 2, the DC transformer is used to convert the output DC voltage of the Vienna rectifier into isolated DC voltage. The DC transformer enables the energy transmission between the high voltage bus and the battery side, while ensuring a high degree of electrical isolation of the battery from the grid, improving system safety and reliability. In addition, a wide voltage output function can be realized by the transformation ratio of the transformer.
The DC transformer is a dual active full bridge converter, consisting of two H-bridge circuits, a high-frequency isolation transformer, and a filter inductor. uab is the output voltage of the left H-bridge. ucd is the output voltage of the right H-bridge. iL is the inductor current. uL is the voltage across the inductor. W1 and W2 are the number of turns on the primary side and the number of turns on the secondary side of the high-frequency isolation transformer, respectively. W1:W2 = n. The power transmission size and direction are controlled by reasonably controlling the on and off of switch tubes S1 to S8.
The dual active full-bridge converter in this paper uses phase-shift control with the following control characteristics.
S1 and S4 are in phase. S1 and S4 are square wave signals with a frequency of 10 kHz and a duty cycle of 50%.
S2 and S3 are in phase. S2 and S3 are both delayed 180° in phase of S1.
S5 and S8 are in phase. S5 and S8 are both delayed θ degree in phase of S1.
S6 and S7 are in phase. S6 and S7 are both delayed 180° in phase of S5.
Figure 4 shows the waveforms of the operating principle of the DC transformer using phase-shift control. where, U1 and U2 are the output voltage amplitudes of the left H-bridge and the right H-bridge, respectively. u’cd is the voltage of the secondary side of the transformer converted to the primary side of the transformer. Ths is half a switching cycle. D is phase-shift duty cycle. t0 ~ t4 is a switching cycle time. The inductor current is waveform symmetric in one switching cycle. According to the slope of leakage inductor current, the expression of the inductor current iL in half a switching cycle can be obtained as:

Waveforms diagram of operating principle of DC transformer
By the odd symmetry, iL(t2) =—iL(t0), which is taken into (14).
To obtain iL(t0), and the average output current can be obtained as:
Both sides of (15) are simultaneously multiplied by the input voltage U1 to obtain the average output power under phase shift control.
According to the current waveform in Fig. 4, the square of the RMS value of the current during phase-shift is calculated as
In (17), d = nU2/U1, based on the odd symmetry of the current waveform and soft-switching limitation condition, (18) can be obtained.
Figure 5 shows the block diagram of DC transformer using phase-shift control, Uo1 is the output voltage of DC transformer, and Uo1ref is the reference value of the output voltage of DC transformer.

Block diagram of DC transformer using phase-shift control
3.3 DC Converter and its Control
In Fig. 2, the DC converter converts the output voltage of the DC transformer to the required operating voltage of the battery.
The DC converter uses three circuits in parallel to increase the total output current capability and reduce the total output current fluctuation through carrier phase-shift control, and the smaller output current fluctuation can reduce the damage to the battery. The converter with three circuits connected in parallel has a certain degree of safety redundancy, so that if one or two of the circuits fail, the remaining circuits can still operate.
Because the operating voltage of the battery is less than the output voltage of the DC transformer, the DC converter works in the step-down mode, the switch tubes Sb1, Sb3 and Sb5 are reasonably turned on and off to control the output voltage of the DC converter, while the switch tubes Sb2, Sb4 and Sb6 are always blocked, Db2, Db4 and Db6 are current-continuing diodes.
When the battery requires the constant current charging, each circuit uses a single closed-loop control of output current. Figure 6 is the block diagram of constant current charging control of the DC converter. ibref is the required charging current of the battery. io1, io2 and io3 are the output currents of circuit 1, circuit 2, and circuit 3 in charging unit 1, respectively.

Block diagram of constant current charging control of the DC converter
For example, if the total charging current required for the battery is 100 A, the charging current of each charging unit is 25A. ko1, ko2 and ko3 are the charging current coefficients of circuit 1, circuit 2, and circuit 3 in charging unit 1, respectively. Generally, ko1, ko2 and ko3 are set as 1/3.
4 Simulation and Experiment
In this paper, a simulation model of a new energy electric vehicle charging pile composed of four charging units connected in parallel is built in MATLAB to verify the feasibility of the DC charging pile and the effectiveness of the control strategy of each component of the charging unit through simulation.
Table 1 shows the parameters of Vienna rectifier, as shown in Fig. 2, uga is the input voltage, Udc is the DC bus voltage, L is the AC filter inductance, C1 and C2 are DC bus support capacitance, switching frequency is the operating frequency of switching tubes of the Vienna rectifier.
Table 2 shows the parameters of DC transformer, as shown in Fig. 2, Udc is the input voltage, Uo1 is the output voltage, Lt is the filter inductance.
Table 3 shows the parameters of DC converter, as shown in Fig. 2, Uo1 is the input voltage, Ubat is the output voltage, Cbat is the output filter capacitor, Lb1, Lb2, and Lb3 are the output filter inductance, switching frequency is the operating frequency of switching tubes of the DC converter.
4.1 DC Converter Composed of One Circuit
Figure 7 shows the waveforms of a DC converter composed of one circuit. The reference current of each circuit is 25A, so the total charging current is 100A. Ib1, Ib2, Ib3 and Ib4 are the output currents of charging unit 1, unit 2, unit 3 and unit 4, respectively. Ib is the charging current of the battery. Io1 is the output current of DC transformer in charging unit 1. Pb is the charging power of the battery. In steady state, Ib1 fluctuates between 22.91A and 27.46A, Ib fluctuates between 98.69A and 102.33A, and Pb fluctuates between 49650 and 51630 W.


Simulation waveforms of a new energy electric vehicle charging pile composed of four charging units
4.2 DC Converter Composed of Three Interleaved Circuits
Figure 8 shows the waveforms of a DC converter composed of three interleaved circuits. The reference current of each circuit is 8.33A, and the reference current of each DC converter is 25A, so the total charging current is 100A. In steady state, Ib1 fluctuates between 23.75A and 26.8A, Ib fluctuates between 99.62A and 101.6A, Pb fluctuates between 50150 and 51150W.


Simulation waveforms of a DC converter composed of three interleaved circuits
4.3 Operation and Stop Test of Multiple Charging Units
Figure 9 shows the simulation waveforms of operation and stop test of multiple charging units, the charging reference current of charging unit 1 changes from 25 to 30A in 0.25 s, charging unit 2 starts operation from 0.03 s, charging unit 3 stops operation from 0.2 s, and the charging reference current of charging unit 4 changes from 25 to 15A in 0.3 s. Uan1, Uup1, Udn1, Udc1 and Uo1 are the AC voltage of phase A in charging unit 1, the support voltage of the upper bridge arm of the Vienna rectifier, the support voltage of the lower bridge arm of the Vienna rectifier, the DC bus voltage of the Vienna rectifier, and the output voltage of the DC transformer, respectively. Ub is the charging voltage of the battery. Ia is the phase current of the grid. Uan is the phase voltage of the grid. Uvab is the line voltage of the Vienna rectifier. uab is the output voltage of the left H-bridge. u’cd is the voltage of the secondary side of the transformer converted to the primary side of the transformer. uL is the voltage across the inductor. iL is the inductor current.

Simulation waveforms of operating and stopping test of multiple charging units
4.4 Experiment of DC Charging Pile with Resistive Load
Figures 10 shows experimental waveforms of DC charging pile with resistive load. At the beginning, the DC converter uses current creep control, when the charging current reaches 120A, it enters constant current charging mode. Uab is the line voltage of the grid.

Experimental waveforms of DC charging pile with resistive load
Figure 11 shows the adjustable resistive load device. The adjustable resistive load device is used to perform voltage stability accuracy test and current stability accuracy test.

Adjustable resistive load device
4.4.1 Output Voltage Stabilization Accuracy Test
When the AC input voltage varies within ± 15% of the rated voltage and the output DC current varies within 0 ~ 100% of the rated value, the output DC voltage should remain stable at any value within the adjustment range, and the output voltage stabilization accuracy of the charger should not exceed ± 0.5%. The formula for calculating the output voltage stabilization accuracy of the charger is expressed as
where \(\delta_{U}\) is the output voltage stabilization accuracy, \(U_{M}\) is the fluctuation limit value of output voltage, \(U_{Z}\) is the setting value of output voltage.
Table 4 shows the results of the output voltage stabilization accuracy test when the setting value of output voltage of the DC charging pile is 200 V.
Table 5 shows the results of the output voltage stabilization accuracy test when the setting value of output voltage of the DC charging pile is 500 V.
4.4.2 Output Current Stabilization Accuracy Test
When the AC input voltage varies within ± 15% of the rated voltage and the output DC voltage varies within the adjustment range, the output DC current should remain stable at any value within 20% to 100% of the rated value, and the output current stabilization accuracy of the charger should not exceed ± 1%. The formula for calculating the output current stabilization accuracy of the charger is expressed as
where \(\delta_{I}\) is the output current stabilization accuracy, \(I_{M}\) is the fluctuation limit value of output current, \(I_{Z}\) is the setting value of output current.
Table 6 shows the results of the output current stabilization accuracy test when the setting value of output current of the DC charging pile is 48A.
Table 7 shows the results of the output current stabilization accuracy test when the setting value of output current of the DC charging pile is 144A.
4.5 Experiment of DC Charging Pile with Electric Vehicle Battery Load
The main components of the DC charger cabinet include: controller, man–machine components, charging modules, lightning protector, leakage protection, circuit breaker, contactor, DC meter, fuse, air cooling system, cabinet body, etc. The main components of the charging pile include: controller, man–machine components, lightning protector, contactor, fuse, socket, charging cable, DC charging vehicle plug, emergency stop button, pile, etc. As shown in Fig. 12a.

Experimental waveforms of DC charging pile with electric vehicle battery load
The DC split charger is equipped with a DC charging piles (interfaces), which can work to meet the DC fast charging requirements of electric vehicles, and can be used in different occasions such as open parking lots and underground garages. The input power of the charger is three-phase five wire AC 380 V, with integrated power factor correction function. The charger adopts modular design internally, and multiple modules connected in parallel. The operation interface can display the charging steps and working status of the whole charging process.
Parameters of aluminum manganate batteries in electric vehicles: rated capacity of 66A h, rated voltage of 360 V, maximum voltage of 4.2 V for a single unit, allowable charging current of 115 A, nominal total energy of 21.6 kW h, and allowable maximum voltage of 405 V. Figure 12 shows the experimental waveforms of the DC charging pile with electric vehicle battery load.
When charging begins, the state of charging (SOC) of the battery is 59%, the charging current climbs rapidly to 115.5A for fast charging, and the DC output voltage increases. As the state of charging gradually increases, the DC output voltage increases very slowly and the charging current gradually decreases for slow charging, thus protecting the battery. Uvab is the line voltage of Vienna rectifier. Ia is the phase current of the grid. Uo1 is the output voltage of DC transformer. Ib is the charging current of the battery. Ub is the charging voltage of the battery. SOC is the state of charging.
Table 8 shows the steady-state fluctuation values of charging current and charging power at different charging current reference values for DC charging piles with single-circuit and three-phase interleaved circuits, respectively.
Table 9 shows the comparison of the harmonic content of the input currents of the rectifiers of the DC charging pile with the three-phase PWM rectifier and the Vienna rectifier, respectively. The three-phase PWM rectifier uses conventional three-phase full-bridge topology. The switching frequency of both rectifiers is 10 kHz. Three-phase PWM rectifier is not modularized, and the power of a single rectifier is 60 kW. In Table 9, Lg is the input reactor of the rectifier. Ib is the charging current.
Table 10 shows the working efficiency of a DC charging pile with different topologies. Topology 1 is the topology of a DC charging pile consisting of three parts: Vienna rectifier, DC transformer, and DC converter. Topology 2 is the topology of a DC charging pile consisting of two parts: Vienna rectifier and DC transformer.
4.6 Analysis of Simulation and Experimental Results
The comparison between Figs. 7 and 8 shows that when the charging unit adopts a DC converter with three circuits staggered in parallel, the fluctuation of charging current and charging power is smaller, it can also be seen that when one or two circuits of the DC converter have problems, the remaining circuits can still work normally, which indicates that the DC converter with three circuits staggered in parallel has good redundancy.
Figure 9 shows that several charging units can start, stop and adjust charging power at different times, Fig. 9a shows that the phase of the grid phase voltage and the grid phase current are basically the same, which can meet the requirements of high power factor rectifier(the national standard requires that the power factor is greater than 95%), Fig. 9c shows that the THD of the current injected into the grid when the rectifier is connected to the grid is small, only 2.06%, meeting the harmonic requirements (the THD of the current required by the national standard is less than 5%). The waveform of inductor current in Fig. 9h is basically consistent with the waveform of working principle of DC transformer using phase-shift control in Fig. 3.
Tables 4 and 5 show that when the AC input voltage varies within ± 15% of the rated voltage and the output DC current varies within 0 ~ 100% of the rated value, the output DC voltage could remain stable at any value within the adjustment range, and the output voltage stabilization accuracy of the charger does not exceed ± 0.5%.
Tables 6 and 7 show that when the AC input voltage varies within ± 15% of the rated voltage and the output DC voltage varies within the adjustment range, the output DC current could remain stable at any value within 20% to 100% of the rated value, and the output current stabilization accuracy of the charger does not exceed ± 1%.
Figure 12 shows that the DC charging pile can be used to charge the batteries of electric vehicle normally and quickly, and the batteries can be fully charged within half an hour.
Table 8 shows that the DC converter adopts three interleaved circuits structure, the steady-state fluctuation values of charging current and charging power are smaller, which plays a certain role in protecting the battery, in addition, this circuit structure has a certain degree of safety redundancy, when one or two circuits have problems, the remaining circuits can still work normally.
Table 9 shows that the harmonic content of the input current of the Vienna rectifier is smaller than that of the PWM rectifier when the inductance of the input reactor is 425uH. The lower the charging current, the higher the harmonic content of the input current of the rectifier. The higher the inductance of the input reactor, the lower the harmonic content of the input current of the rectifier. The harmonic content of the input current of the PWM rectifier exceeds 5% when the inductance of the input reactor is 425uH, but the harmonic content of the input current of the Vienna rectifier is less than 5%. Only when the inductance of the input reactor is 2000uH, the harmonic content of the input current of both rectifiers is less than 5%, but the increase of the reactor inductance causes an increase of the cost and the size of the equipment.
Table 10 shows that the efficiency of the charger with DC transformer structure is lower than that of the charger without DC transformer structure, but the charger with DC transformer structure has the function of electrical isolation. Therefore, the efficiency of the charger with DC transformer structure needs to be improved subsequently.
5 Conclusion
This paper introduces a new energy electric vehicle DC charging pile, including the main circuit topology of the DC charging pile, Vienna rectifier, DC transformer composed of dual active H-bridge converter, and DC converter composed of three interleaved circuits.
The feasibility of the DC charging pile and the effectiveness of the control strategies of each component of the charging unit are verified by simulation and experimental results.
The DC transformer can realize the energy transmission between the high voltage bus and the battery side, while ensuring a high degree of electrical isolation of the battery from the grid, which improves the system safety and reliability.
The DC converter uses three circuits in parallel to increase the total output current capability and reduce the total output current fluctuation through carrier phase shift control, and the smaller output current fluctuation can reduce the damage to the battery.
The DC charging pile can realize high power and fast charging function through parallel operation of multiple charging units, and has the advantages of convenience and reliability.
The output voltage stabilization accuracy of the DC charging pile does not exceed ± 0.5% and the output current stabilization accuracy of the DC charging pile does not exceed ± 1%.
When the inductance of the input reactor is the same, the harmonic content of the input current of the Vienna rectifier is smaller than that of the PWM rectifier.
The efficiency of the DC charging pile with DC transformer structure is lower than that of the DC charging pile without DC transformer structure, but the DC charging pile with DC transformer structure has the function of electrical isolation.
This DC charging pile and its control technology provide some technical guarantee for the application of new energy electric vehicles.
In the future, the DC charging piles with higher power level, high frequency, high efficiency, and high redundancy features will be studied. The automatic fault diagnosis and fault resolution of DC charging piles will also be studied. In addition, the controller, control algorithms, and hardware of DC charging piles will be optimized to achieve higher performance.
Data Availability
The datasets used or analysed during the current study are available from the corresponding author on reasonable request.
References
Choi S, Jung D, Ryu D, Kim J, Won C (2012) 10kW Rapid charger for electric vehicle with active power filter function. In: 2012 IEEE vehicle power and propulsion conference. pp 1037–1041
Murat Y, Philip T (2012) Review of integrated charging methods for plug-in electric and hybrid vehicles. In: 2012 IEEE international conference on vehicular electronics and safety. pp 346–351
Lee I (2016) Hybrid PWM-resonant converter for electric vehicle on-board battery chargers. IEEE Trans Power Electron 31(5):3639–3649
Saadaoui A, Ouassaid M, Maaroufi M (2023) Overview of integration of power electronic topologies and advanced control techniques of ultra-fast EV charging stations in standalone microgrids. Energies 16(3):1–21
Roh Y, Moon Y, Gong J, Yoo C (2011) Active power factor correction (PFC) circuit with resistor-free zero-current detection. IEEE Trans Power Electron 26(2):630–637
Pandey R, Singh B (2019) A power-factor-corrected LLC resonant converter for electric vehicle charger using Cuk converter. IEEE Trans Ind Appl 55(6):6278–6286
Johnson P, Bai K (2017) A dual-DSP controlled SiC MOSFET based 96%-efficiency 20kW EV on-board battery charger using LLC resonance technology. In: 2017 IEEE Symposium series on computational intelligence. pp 1–5
Xuan Y, Yang X, Chen W, Liu T, Hao X (2020) A novel three-level CLLC resonant DC–DC converter for bidirectional EV charger in DC microgrids. IEEE Trans Industr Electron 68(3):2334–2344
Mortezaei A, Abdul-Hak M, Simoes M (2018) A bidirectional NPC based level 3 EV charging system with added active filter functionality in smart grid applications. In: 2018 IEEE Transportation electrification conference and expo. pp 201–206
Liu P, Chen C, Duan S, Zhu W (2017) Dual phase-shifted modulation strategy for the three-level dual active bridge DC–DC converter. IEEE Trans Industr Electron 64(10):7819–7830
Kompella M, Yadav P, Karthick R (2020) A single phase integrated battery charger with active power decoupling for electric vehicle. In: 2020 IEEE international conference on power electronics, drives and energy systems. pp 1–6
Zhao H, Shen Y, Ying W, Ghosh S, Ahmed M, Long T (2020) A single- and three-phase grid compatible converter for electric vehicle on-board chargers. IEEE Trans Power Electron 35(7):7545–7562
Tang Y, Zhu D, Jin C, Wang P, Blaabjerg F (2015) A three-level quasi-two-stage single-phase PFC converter with flexible output voltage and improved conversion efficiency. IEEE Trans Power Electron 30(2):717–726
Saadaoui A, Ouassaid M, Maaroufi M (2022) Backstepping-based control of Vienna rectifier for electric vehicle DC ultra-fast charger. In: 2022 IEEE mediterranean electrotechnical conference. pp 360–365
Tong D, Ren X, Chen Y, Xu M, Hao Z (2019) A nonlinear control strategy to reduce DC bus capacitance in Vienna rectifier. In: 2019 IEEE applied power electronics conference and exposition. pp 1776–1781
Ma H, Wei W, Wang L, Shi Z (2018) Research on SMC-predictive DPC strategy for Vienna rectifier. IEICE Electron Express 15(9):1–9
Fathollahi A, Kargar A, Yaser S, Derakhshandeh S (2022) Enhancement of power system transient stability and voltage regulation performance with decentralized synergetic TCSC controller. Int J Electr Power Energy Syst 135:107533
Wang F, Yang A, Yu X, Zhang Z, Wang G (2023) Model-free predictive current control for three-phase Vienna rectifier based on adaptive super-twisting sliding mode observer. Trans China Electrotech Soc 15:6238
Dang C, Wang F, Liu D, Tong X, Song W (2022) Sliding mode predictive control of vienna rectifier based on optimal vector synthesis. Proceed CSEE 42(23):8699–8707
Acknowledgements
This work was supported by the National Natural Science Foundation of China(52067008) and the Science and Technology Research Project of the Education Department of Jiangxi Province of China(GJJ210823).
Author information
Authors and Affiliations
Contributions
WW was involved in technical research, simulation modeling, experimental platform building and testing, software, and paper writing. XL done technical proposal guidance, experiment guidance, paper review, and funding acquistion. CH done technical proposal guidance, experiment guidance, and paper review.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Ethical Approval
There were no human subjects. There were no animal subjects. The paper did not involve ethical issues.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Wu, W., Liu, X. & Huang, C. A DC Charging Pile for New Energy Electric Vehicles. J. Electr. Eng. Technol. 18, 4301–4319 (2023). https://doi.org/10.1007/s42835-023-01497-w
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42835-023-01497-w