
Abstract
A wireless power transfer (WPT) system based on inductive resonant coupling makes it possible for endoscope micro robot (EMR) to explore intestine noninvasively. However, due to the increased demand for energy in such micro robot system, such as autonomous movement and drug delivery, the small receiving coil (Φ 15 mm × 13 mm) embedded in limited space on micro robot could not supply enough power as expected. To improve the power supply issue, this article proposes a three-coil WPT system for EMRs system. Based on the reflected impedance theory, the receiving end of three-coil WPT system is analyzed. Then, according to maximum power transfer principle, parameters relative to performance of WPT system have been optimized through simulation. After that, some bench tests are constructed. A good match is found between analysis results and experimental data. By comparing the three-coil PTW and two-coil WPT systems, it has verified that the transmission efficiency can be increased significantly to 11.2% by optimized three-coil WPT system and the power dissipation of receiving end could be reduced greatly when the micro robot is under a high power consumption, which is more suitable for endoscope micro robot system with limited space.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Endoscope micro robot (EMR) is a device for intestinal diagnosis, which can be introduced either mouth or anus non-invasively [1]. It can move actively in intestinal tract, mainly in three states such as moving forward or backward and holding itself at suspicious lesions, which leads to a lowest false negative rate (FNR). In addition, the improving safety and comfort make it become a substitute to the traditional endoscope [2]. EMRs in current world mainly are divided into two categories according to driving method. One is magnetic-drive EMR, and the other is called actuator-onboard drive EMR. The former is the one using magnetic interaction between a permanent magnet producing magnet field outside the body, and a permanent magnet integrated in EMR [3]. This kind of EMRs are usually used in detection of stomach and intestinal tract with large diameter. The latter one is driven by onboard-motors. By the way of moving, the motor-drive EMRs include leg-based micro robot, paddling-based micro robot and tank-liked micro robot. Theoretically, this kind of EMRs could explore the whole gastrointestinal (GI) tract if energy is sufficient.
Though the magnetic-drive EMRs could move actively without power consumption, realizing the function of detection such as illumination, image recording and extracting biopsy [4], is power consuming. Let alone the motor-drive EMRs. Due to high power consumption [5], exploring a suitable power supply for EMRs is an urgent issue. The common and traditional way is cable power supply. But the movement area of EMRs with cable power supply may be restricted and the detection could not cover the whole GI tract. In addition, damage to GI tract can be caused. Due to the long-term power supply and high power consumption, the coin batteries commonly used in clinical application are not sufficient because of limited capacity [6]. Then, wireless power transfer (WPT) system is gradually coming into view, and developing rapidly. Compared to radiative transfer system (RT), which is harmful to human and transcutaneous energy transfer (TET), which limited in distance, WPT system has been considered as a most suitable way for EMRs system.
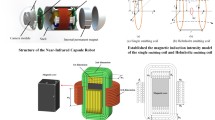
WPT used in EMRs system is commonly composed of one-dimensional (1D) transmitting coil (TC) generating uniform alternating magnetic field in one direction outside body and three-dimensional (3D) receiving coil (RC) for induction embedded on EMRs in body. Unlike RC in a small and limited space in body, it is more easy to optimize TC outside the body. A lot of types of TCs have been analyzed, such as a solenoid coil, solenoid pair coils, double-layer solenoid pair coils, a segmented solenoid coil, and a Helmholtz coil [7, 8]. By comparing all types of TCs in terms of magnetic field intensity and uniformity, the type of double-layer solenoid pair coils is the best choice [9]. In research [10], in order to improve the uniformity and intensity of the alternating magnetic field generated by transmitting coil, the number of turns of TC considered as a parameter has been optimized. Besides, previous researchers also investigated the quality factor of the TC, trying to optimize quality factor for higher transmission efficiency [11]. To the three-dimensional RC in body as the other part of WPT system, using a ferrite core with high permeability is a common way to enhance the mutual inductance between RC and TC, improving the power transmission efficiency, as reported in researches [12]. Then, kinds of ferrite core shapes were designed to make full use of limited space in EMRs, so as to strengthen induction intensity of magnetic field. However, the transmission efficiency is still as low as 0.8–3.55%. Due to limited space for 3D RC on micro robot and the extreme complexity of 3D RC optimization, the selection of 3D RC is made based on experimental comparison currently, which is a low efficiency way. With the development in miniaturization of position and attitude detection sensor, the position of RC can be detected. By adjusting the position of TC, the perfect magnetic induction could be achieved. Therefore, one-dimensional RC could be used to replace three-dimensional RC. The two-coil RC in research [13] has been analyzed by experimental comparison, which shows a low efficiency for micro robot power supply. To improve the power transfer efficiency, a three-coil WPT system using Helmholtz like load coils in the receiving part was proposed for robot system [14]. Although the three-coil system is analyzed, it is only limited to the study of the influence of the number of turns of the receiving coil and the load coil on the transmission efficiency.
At present, there are few researches on three-coil WPT system applied for EMR system (in limited space), and the analysis is still not comprehensive. In this paper, both receiving coil and load coil of a three-coil WPT are systematically analyzed, and each parameter that may affect the transmission efficiency is given and optimized. Then the optimized model is verified through the prototype. The theoretical and experimental results show that the proposed three-coil WPT system improves the PTE (power transfer efficiency) and the PDL (power deliver to load), simultaneous controlling power dissipation. This article is focused on a more comprehensive analysis method for optimizing RC in three-coil WPT system according to maximum power transfer principle, in which all parameters relative to performance of WPT system have been considered.
The original contributions of this paper are as follows. 1. Improvement of transmission efficiency to 11.2%. 2. The power dissipation of the receiving end can be controlled effectively while ensuring the sufficient power delivered to load. 3. The maximum transmission power and impedance matching of receiving loop can be considered separately and independently in the design optimization process.
This paper is organized as follows. The overview of the three-coil WPT system used in EMR system are introduced in Sect. 2. Section 3 provides details about analysis and optimization of three-coil WPT system. Then experimental validation and results analysis are presented in Sect. 4. Finally, in Sect. 5 discussion and conclusions are drawn.
2 Proposed Three-coil Wireless Power Transfer System Review
Figure 1 shows the micro robot intestinal diagnosis system. It consists of three modules: micro robot module, wireless power transfer module and human machine interface module. The micro robot module explores the intestine in the body, which is equipped with camera, control circuit and especially receiving coil. Receiving coil is a key part of wireless power transfer system, which is discussed in detail in next section. The relevant transmitting coil is set out of body, generating alternating magnetic field. Both receiving coil and transmitting coil constitute the wireless power transfer module, which supplies the power to micro robot module. Human machine interface (HMI) module is used to observe images inside the intestine and control micro robot and data exchange for diagnosis in intestine.

Micro robot intestinal diagnosis system
The EMR used here could move forward, backward and holding itself at specific point in intestine. Under the 5 V power supply, when the robot moves in the intestine, the current is about 0.14 A. When it stops, the current reduces to 0.08 A. Correspondingly, the equivalent resistance of the drive and control module in the robot is in the range of 29.573 Ω to 62.384 Ω. The maximum power consumption is 850 mW when the equivalent resistance is 29.573 Ω.
The work principle of wireless power transfer is as follows. First, a square-wave signal as an input is generated from a signal generator. Then, after a full-bridge inverter circuit, direct current (DC) is converted into alternating current (AC). When AC applied to the series resonant circuit, because of the frequency selection function of the series resonant circuit, a sinusoidal excitation current will be generated in the transmitting coil, thereby exciting an alternating magnetic field in the area around the transmitting coil. At the same time, the receiving coil induces the alternating magnetic field excited by the transmitting coil to generate induced electromotive force. The AC is converted back to DC after a power management circuit and provides a stable output voltage for micro robot module.
As is known, in wireless power transfer system, it could maximize transmission efficiency when impedance matching of the receiving loop. When mutual inductance M is relatively large,\(R_{R}\) is much larger than load resistance. Besides optimizing the receiving coil directly, an additional coil can be added to tightly couple with the receiving coil (shown in Fig. 2), as a load coil with adjustable coupling coefficient. Then an impedance matching circuit at receiving end is formed, it can also provide a high system energy transfer efficiency. The corresponding system is called a three-coil wireless power transfer system. Due to the work environment and energy transfer distance in micro robot intestinal diagnosis system, a three-coil system have been adopted. The three-coil wireless power transfer system proposed in this article could be proved a better performance for micro-robot of intestinal diagnosis.

The equivalent circuit of three-coil wireless power transfer system
3 Analysis and Optimization of Proposed Three-coil WPT System for EMR
In this section, based on reflected impedance theory, the performance of the three-coil wireless power transfer system is clarified in terms of transmission power and power dissipation at receiving end. For comparative analysis, two-coil system discussion is given accordingly.
3.1 Analysis of Three-coil WPT System
The equivalent circuit of inductive resonant coupling in three-coil wireless power transfer system is presented in Fig. 2.\(V_{t}\) is input voltage. \(C_{1}\),\(C_{2}\) and \(C_{3}\) are capacitances, which are used to make each loop resonant at the frequency of interest. \(k_{12}\) is the coupling coefficient of inductors \(L_{1}\) and \(L_{2}\),and \(k_{23}\) is the coupling coefficient of inductors \(L_{2}\) and \(L_{3}\). Due to weakly coupled, the mutual inductance \(M\) between transmitter coil and load coil can be ignored. \(R_{1}\),\(R_{2}\) and \(R_{3}\) are equivalent resistances of transmitting loop, receiving loop and load loop, respectively.\(I_{i}\) represents the current in loop \(i\)(\(i = 1,2,3\)).\(R_{L}\) is the load resistance.
According to Kirchhoff laws, what we can obtain from Fig. 2 are as follows,
where \(Z = \omega_{0}^{2} \cdot k_{23} \cdot L_{2} \cdot L_{3} \cdot R_{1} + \omega_{0}^{2} \cdot k_{12} \cdot L_{1} \cdot L_{2} \cdot \left( {R_{3} + R_{L} } \right) + R_{1} \cdot R_{2} \cdot \left( {R_{3} + R_{L} } \right)\). \(\omega\) is angular frequency and \(\omega_{0} = {1 \mathord{\left/ {\vphantom {1 {\sqrt {L_{i} C_{i} } }}} \right. \kern-\nulldelimiterspace} {\sqrt {L_{i} C_{i} } }}{\kern 1pt} \;\;(i = 1,2,3)\) is resonant angular frequency;\(k_{12} = {{M_{12} } \mathord{\left/ {\vphantom {{M_{12} } {\sqrt {L_{1} \cdot L_{2} } }}} \right. \kern-\nulldelimiterspace} {\sqrt {L_{1} \cdot L_{2} } }}\); \(k_{23} = {{M_{23} } \mathord{\left/ {\vphantom {{M_{23} } {\sqrt {L_{2} \cdot L_{3} } }}} \right. \kern-\nulldelimiterspace} {\sqrt {L_{2} \cdot L_{3} } }}\).
Therefore, the PDL \(P_{{3{ - }C}}\) and transmission efficiency \(\eta_{{3{ - }C}}\) of three-coil wireless power transfer system can be derived as,
where \(\eta_{3t}\) and \(\eta_{3r}\) are power transfer efficiency of transmitting coil and receiving coil in three-coil system, respectively;\(Q_{1} = \omega_{0} \cdot L_{1} /R_{1}\) is quality factor of the transmitting loop; \(Q_{2} = \omega_{0} \cdot L_{2} /R_{2}\) is quality factor of the receiving loop;\(Q_{3L} = \omega_{0} \cdot L_{3} /\left( {R_{3} + R_{L} } \right)\) is defined as the loaded quality factor of the load loop. \(Q_{2L} = Q_{2} /\left( {1 + k_{23}^{2} \cdot Q_{2} \cdot Q_{3L} } \right)\) is defined as loaded quality factor of the receiving side considering the reflected impedance of load loop; the reflected impedance from load loop to receiving loop \(R_{rl} = R_{2} \cdot k_{23}^{2} \cdot Q_{2} \cdot Q_{3L}\);\(P_{LM}\) presents PDL when impedance matching of receiving loop, that is to say, the maximum \(P_{{3{ - }C}}\);\(U_{3 - C}\) presents utilization rate of \(P_{LM}\) in the receiving loop;\(U_{L}\) presents energy efficiency of load circuit.
The power dissipation \(P_{{3{ - }d}}\) at receiving end of three-coil system consists of two parts, power dissipation of receiving loop and power dissipation of load loop. And \(P_{{3{ - }d}}\) can be obtained from equation below [14],
To facilitate analysis for comparison, the PDL \(P_{{2{ - }C}}\) and transmission efficiency \(\eta_{{2{ - }C}}\) in two-coil wireless power transfer system are derived similarly, shown as,
where \(Q^{\prime}_{2L} = \omega_{0} \cdot L_{2} /\left( {R_{2} + R_{L} } \right)\) is loaded quality factor of the receiving loop; \(\eta_{2t}\) and \(\eta_{2r}\) refers to power transfer efficiency of transmitting coil and receiving coil in two-coil system, respectively; \(U_{{2{ - }C}}\) is utilization rate of the maximum PDL \(P_{LM}\).
The power dissipation \(P_{{2{ - }d}}\) at receiving end varies with \(P_{{2{ - }C}}\), given by,
In order to ensure that the energy efficiency of the three-coil wireless power transfer system is greater than that of two-coil wireless power transfer system, according to Eqs. (3) and (4), the mutual inductance \(M_{23}\) should meet the following inequality,
When \(M_{23}\) meets Eq. (6) and \(R_{rl}\) closes to \(R_{2}\), then \(U_{{3{ - }C}}\) can be increased. In addition, the optimal value \(M_{23} = {{\sqrt {R_{2} \cdot \left( {R_{3} + R_{L} } \right)} } \mathord{\left/ {\vphantom {{\sqrt {R_{2} \cdot \left( {R_{3} + R_{L} } \right)} } \omega }} \right. \kern-\nulldelimiterspace} \omega }\) in Eq. (6) could achieve the impedance matching between \(R_{rl}\) and \(R_{2}\), and obtain the maximum \(P_{{3{ - }C,M}}\),
What on above shows the necessary conditions that the intestinal micro robot could be powered by the three-coil wireless power transfer system efficiently and adequately, based on reflected impedance theory.
In addition, if \(R_{3} < < R_{L}\),\(P_{{3{ - }C,M}} \approx P_{LM}\). What can be seen in \(\Delta\), the smaller \(R_{3}\) leads to large feasible region of \(M_{23}\) in Eq. (6), which makes the necessary conditions more easier to meet.\(R_{rl}\) can be adjusted by changing the coupling coefficient between the receiving coil and the load coil. When the load \(R_{L}\) is determined,\(P_{{3{ - }C}}\) increases to \(P_{{3{ - }C,M}}\) with \(R_{rl}\) increasing firstly, then decreases. Meanwhile, the increasing \(R_{rl}\), that is to say \(k_{23}^{2} \cdot Q_{2} \cdot Q_{3L}\) increased, could reduce effectively \(P_{{3{ - }d}}\). Moreover,\(P_{{3{ - }d}}\) is further reduced when \(R_{3}\) is smaller.
For a three-coil wireless power transfer system, in which mutual inductance \(M_{23}\) is adjustable in a larger range of its optimal value, there are more ways to improve system performance, such as, increasing \(P_{LM}\) and making \(U_{3 - C} \approx 1\). In order to reduce \(P_{{3{ - }d}}\),\(M_{23}\) should be appropriately larger than its optimal value. Not only that, the smaller \(R_{3}\) could improve the performance comprehensively of the three-coil wireless power transfer system. Therefore, parameters \(R_{3}\) and \(M_{23}\) should be considered during the load coil design of the three-coil wireless power transfer system.
3.2 Optimization of Proposed Receiving End of Three-coil WPT System
In order to ensure that the wireless power transfer system meets the energy needs of the micro robot system, from Eq. (2) we can see that \(P_{LM}\) should be increased leading to a higher \(P_{{3{ - }C}}\). In addition, Eq. (3) shows that \(P_{{3{ - }d}}\) is inherent to \(P_{{3{ - }C}}\). With sufficient energy supply, increasing \(R_{L}\)(or decreasing \(R_{3}\)) could reduce \(P_{{3{ - }d}}\) to a certain extent. In this section, both receiving coil and load coil are optimized in detail to improve the efficiency of three-coil WPT system. On one hand, for a receiving coil in a limited space, optimizing the thickness of the coil core, the number of winding layers and the specification of the twisted wires can effectively improve the performance of the wireless power transfer system. For a load coil, on the other hand, parameter \(M_{23}\) should be considered during the optimization of load coil design.
To facilitate analysis, the receiving coil is optimized by using two-coil wireless power transfer system introduced above and verified by the actual system. Ferrite core is used as the coil core material. The inner diameter size is set as 10.8 mm, so as to ensure that the magnetic core is insulated from its internal parts. Moreover, the thickness of the Ferrite core \(\delta\) should be more than 1 mm, in order to shield the influence of internal parts on the receiving coil. Receiving coil made of twisted wires can reduce coil eddy current loss. According to working frequency \(f_{0}\), the diameter 0.07 mm wires with four different numbers of strands \(n_{s}\) are picked up [15]. Specification of the twisted wires selected are listed in Table 1. The number of winding layers is related to δ and twisted wires specifications. The sum of the thickness of the wires and the magnetic core must be less than 2.1 mm, no more than the diameter of micro robot 15 mm. For human bio-electromagnetic safety, the maximum driving current is set 1.7 A [16].
3.2.1 Optimization of Receiving Coil
The pair of solenoid is adopted as the transmitting coil of wireless power transfer system in this paper, according previous work [17]. Based on calculation method of coil with magnetic core and equivalent resistance connected in series and ANSYS software,\(M_{12}\) and \(R_{2}\) can be obtained. The influence of the robot parts at both sides of the receiving coil on its AC resistance can be quantitatively given by the method used in research [18]. When calculating \(M_{12}\), the receiving coil embedded on micro robot is placed in the center of the transmitting coil and coaxial with it. To specify the influence of core thickness and twisted wire specifications on \(P_{{2{ - }C}}\), set the number of winding layers at the range of 0–6. Because the power demand is the largest in the robot when the equivalent resistance of the drive and control module is 29.573 Ω, then the load resistance is set as 29.573 Ω in the process of optimizing \(P_{{2{ - }C}}\).
First, the thickness of the Ferrite core is set \(\delta = 1\), and the receiving coils are wound with different layers separately using the selected twisted wires listed in Table 1 (\(n_{s} = 3,7,10\)). The \(P_{LM}\) and \(U_{{2{ - }C}}\) of the two-coil wireless power transfer system formed by each receiving coil are shown in Fig. 3a, when the driving current in the transmitting coil is 1 A.

Two-coil system \(\delta = 1\): a Simulated PLM and U2-c; b P2-c deduced
As illustrated in Fig. 3a,\(P_{LM}\) increases almost linearly with the number of receiver coil layers, and also increases corresponding to \(n_{s}\) decreasing. However, the growth trend of \(P_{LM}\) gradually slows down as \(R_{2}\) increases rapidly with the increasing number of receiving coil layers. Also limited to \(R_{2}\), the maximum \(U_{{2{ - }C}}\) is obtained when the number of layers of the receiving coil is small, and the smaller \(n_{s}\) leads to the sharper change of \(U_{{2{ - }C}}\). In order to determine whether each receiving coil is suitable for the intestinal micro robot system (600 mW needed), driving current of the transmitting coil to is set to1.7A. Based on \(P_{LM}\) and \(R_{2}\) simulation values,\(P_{{2{ - }C}}\) is calculated, the results shown in Fig. 3b. It can be seen from Fig. 3a that the change trend of \(P_{{2{ - }C}}\) with the number of layers is consistent with \(U_{{2{ - }C}}\). For receiving coils wound with twisted wires of different specifications (\(n_{s} = 3,7,10\)), the maximum values \(P_{{2{ - }C}}\) are approximately equal and are all obtained when \(R_{2}\) is close to \(R_{L}\).
Then, the influence of core thickness \(\delta\) on \(P_{{2{ - }C}}\) is discussed through simulation experiments. In these experiments,\(n_{s}\) is set as 21, and \(\delta = 1,\;1.2,\;1.6\) mm respectively. The simulation results are presented in Fig. 4. The trends of \(P_{LM}\) and \(U_{{2{ - }C}}\) with layer number in Fig. 4a are similar as that in Fig. 3a. The larger the core thickness \(\delta\), the larger the \(P_{LM}\) and the faster the growth. In addition, when \(\delta > 1\), the corresponding \(U_{{2{ - }C}}\) to the receiving coil with the same number of layers does not change much, which proves that the impact of intestinal micro robot parts on \(R_{2}\) has been minimized as much as possible. The deduced \(P_{{2{ - }C}}\) has been shown in Fig. 4b under driving current set to 1.7 A. Increasing the core \(\delta\) can significantly increase \(P_{{2{ - }C}}\). The overall trends of \(P_{{2{ - }C}}\) corresponding to layer number in Fig. 4b is similar as that in Fig. 3b. The maximum \(P_{{2{ - }C}}\) is obtained at a large layer number. Obviously, the parameter \(\delta\) is more important than \(n_{s}\) for improving \(P_{{2{ - }C}}\) when comparing the results in Figs. 3b and Fig. 4b.

Two-coil system \(n_{s} = 21\): a Simulated PLM and U2-c; b P2-c deduced
According to analysis above, the maximum \(P_{{2{ - }C}}\) is generally obtained when \(R_{2}\) is close to \(R_{L}\). Increasing the twisted wire \(n_{s}\) when \(\delta\) kept the same or increasing the magnetic core \(\delta\), which means \(R_{2}\) decreasing, leads to the optimal layer number related to \(P_{{2{ - }C}}\) in receiving coil increases accordingly. When \(\delta = 1.6\) mm and \(n_{s} = 21\), the optimal layer number is 4. It should be noticed that \(P_{{2{ - }C}}\) close to maximum value as layer number is 3. Therefore, the maximum layer number of receiving coil wound by different twisted wires can be set to 3, to save space. Since the larger \(\delta\) leads to larger \(P_{{2{ - }C}}\), receiving coil with different layer can be equipped with suitable thickness of the magnetic core under the constraint 15 mm for outer diameter of receiving coil. As driving current of the transmitting coil to is set to1.7A, the simulation results of \(P_{{2{ - }C}}\) in each wireless power transfer system composed of receiving coil with the limited size mentioned above are listed in Table 2. The maximum \(P_{{2{ - }C}}\) occurred as \(n_{s} = 7\) with two layers.
3.2.2 Optimization of Load Coil (Receiving End)
Optimizing the receiving coil in a limited space can effectively improve the performance of the wireless power transfer system. Furthermore, converting it to a three-coil wireless power transfer system can make a further increasing for PDL \(P_{{3{ - }C}}\) and the power dissipation \(P_{d}\) can be adjusted according to demand. There are two ways to add additional coil at receiving end. As presented in Fig. 5a, one is that in two-coil wireless power transfer system, a part of the receiving coil is separated axially as a load coil, thus forming a three-coil wireless power transfer system. The load coil and the receiving coil are axially aligned, and the gap between these two is named \(d_{23}\). Then,\(M_{23}\) can be adjusted flexibly by changing \(d_{23}\). The other way shown in Fig. 5b is that a part of receiving coil can also be separated radially as a load coil to realize a three-coil wireless power transfer system. However, due to the limited space on endoscope micro robot,\(M_{23}\) in this style cannot be adjusted as expected. Besides, the selection of magnetic core \(\delta\) and specification of the twisted wires make it more difficult to meet the design requirements. So, in this section, the first method is discussed in detail. In three-coil system, load coil is connected to the intestinal robot body drive and control circuit. The separated part of receiving coil and the compensation capacitor are connected in series resonance, as an intermediate coil.

Arrangement of the coils in receiving side: a coils aligned axially; b concentric coils aligned in radial
It can be seen from Eq. (6), to get high \(P_{{3{ - }C}}\), the \(R_{2}\) must be much larger than \(R_{L}\). So the receiving coil selected in Sect. 3.2.1 is not optimal to separate a load coil. The magnetic core \(\delta\) is still set as 1.6 mm as large \(\delta\) effectively improving \(P_{LM}\). To get large \(R_{2}\), the receiving coil is wound in three layers with twisted wire \(n_{s} = 3\). In order to ensure that \(M_{23}\) has a larger adjustment range, the maximum \(d_{23}\) is set to 1 mm. Number of turns is 52 in the limited space left on micro robot. So we assume that the number of turns on each layer of the receiving coil and the load coil is set to 52-\(2n\) and \(n\). The parameter n not only ensures that \(M_{23}\) is within the range introduced by Eq. 6, but also should be able to achieve the optimal value \(M_{23} = {{\sqrt {R_{2} \cdot \left( {R_{3} + R_{L} } \right)} } \mathord{\left/ {\vphantom {{\sqrt {R_{2} \cdot \left( {R_{3} + R_{L} } \right)} } \omega }} \right. \kern-\nulldelimiterspace} \omega }\) by adjusting \(d_{23}\). The load resistance \(R_{L}\) is also set as 29.573 Ω.
Figure 6 shows the feasible and adjustable range of \(M_{23}\). As can be seen in Fig. 7, the feasible range of \(M_{23}\) increases with \(n\) decreasing. \(\Delta < 0\) in Eq. 6 means the feasible range doesn’t exist as \(n \ge 6\). Obviously, when \(n = 3\), the adjustable range is covered by feasible range, and most important, the optimal value \(M_{23}\) can be obtained. For power \(P_{LM}\), shown in Fig. 7 as \(n\) is picked from 0 to 6, due to the influence of micro robot parts on \(R_{2}\),the growth trend of \(P_{LM}\) comes to slow down, and even decreases. Though the maximum \(P_{LM}\) is obtained at \(n = 2\), the \(P_{LM}\) at \(n = 3\) is also acceptable. After comprehensive analysis in Figs. 6 and Fig. 7, the number of turns on each layer of the load coil is determined as 6 (\(n = 3\)), so that of receiving coil is 46.

Feasible and adjustable range of M23 corresponding to n

Three-coil system: Calculated PLM corresponding to No. of turns
Then,\(P_{{3{ - }C}}\) and \(P_{{3{ - }d}}\) in three-coil wireless power transfer system are determined by driving current \(I_{d}\) and reflected impedance \(R_{rl}\).The equivalent input resistance \(R_{Ld}\) of the drive and control circuit in the micro robot varies from 29.573 to 62.384 Ω. When the equivalent input resistance is 29.573 Ω, the power demand of the micro robot system is the largest, up to 850 mW. In order to reduce \(P_{{3{ - }d}}\),\(R_{rl}\) should continue to increase from the base value of the impedance matching of the receiving loop when \(R_{L}\) is 29.573 Ω. According to Eq. (3’), when \(R_{rl}\) increases from \(R_{2}\) to 1.576 \(R_{2}\), \(P_{{3{ - }C}}\) decreases to 95%\(P_{{3{ - }C}}\). While continuing to increase \(R_{rl}\) to 1.925 \(R_{2}\), \(P_{{3{ - }C}}\) is reduced to 90%\(P_{{3{ - }C}}\). Correspondingly, when \(R_{L}\) is 29.573 Ω,\(M_{23}\) increases from the optimal value of 46.07––57.83μH, and then increases to 63.914 μH.
In addition, voltage regulators LT1763-5 V is adopted for power supply in the drive and control circuit. When the input voltage of LT1763 is greater than 5 V, the dissipation of the voltage regulator chip causes the equivalent input resistance of the drive and control circuit to increase. When the input voltage of LT1763 is 5 V, the equivalent input resistance is recorded as \(R_{Ld}\), from 29.573 to 62.384 Ω, which can be used to present each working state of the micro robot. And the larger the \(R_{Ld}\) is, the smaller power the system is needed. For simulation, in three-coil wireless power transfer system,\(M_{23}\) is set as 46.07μH, 57.83 μH and 63.914 μH respectively. When the input power is constant and \(P_{{3{ - }C}}\) is equal to 850 mW as \(R_{L}\) is 29.573 Ω, the results \(R_{rl}\) of system loaded with the drive and control circuit or the pure resistance \(R_{Ld}\) respectively are shown in Fig. 8a. As can be seen in Fig. 8a, except \(R_{Ld} = 29.573\), compared with loaded with drive and control circuit, \(R_{rl}\) in system loaded with pure resistance reduces greatly. Figure 8b presents the relationship of power dissipation \(P_{{3{ - }d}}\) versus \(R_{Ld}\) at the same condition. In addition,\(P_{{2{ - }d}}\) of the receiving coil selected above in two-coil wireless power transfer system is also given in Fig. 9b. When the power demand of the robot system decreases (\(R_{Ld}\) increasing in Figure),\(P_{{3{ - }d}}\) becomes larger, while \(P_{{2{ - }d}}\) decreasing. However, as \(M_{23} = 63.914\mu H\),\(P_{{3{ - }d}}\) is much smaller than \(P_{{2{ - }d}}\) under big the power demand of the robot system (\(R_{Ld}\) at a small value), which means the micro robot is in motion.

a Calculated Rrl and b calculated Pd

Prototype of endoscope micro robot: a Receiving coil optimized; b Coils in the receiving side with d23 = 0.86 mm; c Coils in the receiving side with d23 = 0 mm; d Driving and control module & Lt1763 regulator module
It should be noticed that even though \(M_{23} = 63.914\mu H\) in three-coil wireless power transfer system leads to \(P_{{3{ - }C}}\) reduced to 90%\(P_{{3{ - }C}}\), it reduces the power dissipation \(P_{{3{ - }d}}\) effectively. Moreover, \(P_{{3{ - }d}}\) can be made up by increasing the drive current \(I_{d}\) to 1.054 \(I_{d}\). In addition,\(P_{{3{ - }C}}\) could obtain optimal value at \(R_{L} = 68.089\)\(\Omega\), and the change of \(P_{{3{ - }C}}\) is small near this \(R_{L}\). Therefore, when the robot system is in a low power consumption state (\(R_{Ld} = 62.5\)\(\Omega\)), the input power can be greatly reduced, thereby reducing \(P_{{3{ - }d}}\) as much as possible.
According to the above analysis, two coils with mutual inductance \(M_{23} = 63.914\mu H\) are selected as the receiving end of the three-coil wireless power transfer system, which can increase \(P_{L}\) while reducing \(P_{d}\) significantly.
4 Experimental Validation
Figure 9 shows the prototype of endoscope micro robot. It was used to carry on experimental verification on the performance of the wireless power transfer system optimized by the simulation design. It should be noticed that the receiving coils are wound by hand in lab. So in prototype system, the actual number of turns per layer of the receiving coil wound on ferrite core is 50. The parameters of transmitting coil and optimized receiving coil are listed in Table 3. Based on parameters in Table 3, the adjustable maximum is calculated as \(M_{23} = 65.775\)\(\mu H\)(\(d_{23} = 0\)) corresponding to 63.914 μH in theory analysis, and adjustable minimum is calculated as \(M_{23} = 46.07\mu H\),\(d_{23} = 0.86\) mm corresponding to \(d_{23} = 1\) mm in theory analysis.
The electrical parameters of the receiving end coils of the prototype system are mainly measured by the LCR tester (HIOKI 3532–50). The value of \(M_{12}\) is derived from induced electromotive force of the receiving coil. For the two-coil wireless power transfer system, the compensation capacitance of receiving coil is 1.956nF. In three-coil wireless power transfer system, the compensation capacitances of receiving coil and load coil are 754.4pf and 33.9nf respectively at \(d_{23} = 0.86\) and when \(d_{23} = 0\), the corresponding compensation capacitances are 744.6 pF and 32.1 nF.
4.1 Power \(P_{L}\) Verification at Receiving End
The equivalent resistance of the drive and control circuit in the micro robot is greatly affected by input power. For this reason, when verifying \(P_{L}\) of the prototype system, a pure resistance at the range of 29.573–62.384 Ω was selected as the load. The drive current of the transmitter coil was set to 1A and the voltage of load \(V_{L}\) can be measured by oscilloscope (TDS3052B). Then \(P_{L}\) was derived.
Figure 10 presents the measured and theoretical results of \(P_{L}\) in different prototype systems. As can be seen in Fig. 10, the measured and theoretical results have a good match in three systems. Obviously, the proposed optimized three-coil WPT system could supply more energy than optimized two-coil one. When load resistance is 29.573 Ω, the measured \(P_{{3{ - }C}}\) in system where \(d_{23} = 0\)(\(M_{23} = 64.485\mu H\))is 446.23 mW, which is approximately 1.18 times of the corresponding measured \(P_{{2{ - }C}}\). When \(d_{23} = 0.86\) (\(M_{23}\) decreases to 46.12 μH), the measured \(P_{{3{ - }C}}\) reduced to 91.02% of the one at \(d_{23} = 0\). However, \(P_{{3{ - }C}}\) could achieve a higher value with load resistance increasing when \(d_{23} = 0.86\).

\(P_{L}\) of the specified wireless power transmission systems
4.2 Power Dissipation \(P_{d}\) Verification at Receiving End
The influence of voltage regulators LT1763 on system should be considered when calculating power dissipation at receiving end. Corresponding to different working states of the micro robot (motion or static), LT1763 was followed by a resistance at the range of 29.573–62.384 Ω, which was selected as the load. To measure \(P_{d}\) of the prototype system accurately, both input voltage of LT1763 and resonant current of receiving loop in three-coil wireless power transfer system are measured by oscilloscope.
Keeping the current constant, make sure \(P_{L} = 850mW\) when the load resistance is 29.573 Ω. \(P_{d}\) can be derived by measured parameters with different load resistance. The results are presented in Fig. 11. The theory value of \(P_{d}\) calculated according the calculated parameters is given in Fig. 11. The measurement results of \(P_{d}\) agreed well with the calculated ones, see in Fig. 11. With the load resistance decreasing from 34.817 Ω, in Fig. 11b, \(P_{d}\) in three-coil with \(M_{23} = 64.485\mu H\) is much smaller than that in optimal two-coil system. Meanwhile the load current is larger than 0.14 A, which shows that, \(P_{d}\) could be controlled at a low value when micro robot moving in intestine.

Pd in the specified wireless power transfer systems loaded with a LT1763 module
In addition, the power dissipation of receiving coil is the main part of \(P_{d}\), which can be seen from theoretical data in Fig. 11. For three-coil wireless power transfer system, the power dissipation in load loop is relatively low. However, the equivalent resistance of the load loop increases, which reduces the reflected impedance \(R_{rl}\) from load loop to receiving loop, leading to a high power dissipation in receiving coil. When the micro robot is in a static state, the input power must be decreased in wireless power transfer system to reduce \(P_{d}\). At this time, the drive and control module can be replaced by the LT1763 module connected with a 62.384 Ω resistance. The resonance current of the receiving loop can be measured when the input voltage of LT1763 is 5 V. Then \(P_{d}\) in different prototypes can be deduced, listed in Table 4. Compared with data in Fig. 11, \(P_{{2{ - }d}}\) reduced by 53.08%; in the system with \(M_{23} = 64.485\mu H\),\(P_{{3{ - }d}}\) reduced from 2.448 W to 479.7 mW, approaching to \(P_{{2{ - }d}}\); while in the system with \(M_{23} = 46.12\mu H\), due to small \(R_{rl}\),The reduction of \(P_{{3{ - }d}}\) was not significant as that in the system with \(M_{23} = 64.485\mu H\).
Generally, the performance of wireless power transfer system is usually evaluated by energy transmission efficiency. When \(R_{L}\) is 29.573 Ω and \(P_{L}\) is 850mW in the optimized wireless power transfer systems, the efficiency of power transmission can be calculated, in which the needed input current \(I_{1}\) and voltage \(V_{t}\) could be obtained from transmitting container. The transmission efficiencies of three wireless power transfer systems are shown in Table 5.
From the analysis above, three-coil wireless power transfer system with \(M_{23} = 64.485\mu H\) has a high transmission efficiency and power dissipation \(P_{d}\) can be controlled effectively. So it is a best choice to supply energy for micro robot.
5 Discussion and Conclusion
As is known, in wireless power transfer system, when the receiving loop impedance matches, increasing the mutual inductance between the two coils can effectively improve the power transmission efficiency of WPT system. However, for endoscope micro robot system, affected by robot parts, the equivalent series resistance increases significantly, which leads to low transmission efficiency. To improve the power supply issue, in this study, an additional load coil is added to couple with receiving coil, forming a three-coil WPT system, in which the mutual inductance is adjustable. In the proposed system, the impedance matching of receiving loop and the increase of mutual inductance can be realized respectively.
For comparative analysis, both three-coil and two-coil models for micro robot system have been built. Based on the reflected impedance theory, the receiving end of three-coil WPT system is analyzed, and its design criteria are given. Through analysis and optimization, the optimal design parameters relative to improvement of delivered power \(P_{L}\) and reduction of power dissipation \(P_{d}\) are obtained. Then some bench tests with optimized receiving coils (Φ 15 mm × 13 mm) integrated into porotypes of endoscope micro robots were conducted. When the maximum power consumption 850 mW of the micro robot system is met, compared with two-coil WPT system, the transmission efficiency of the optimized three-coil WPT system (\(M_{23} = 64.485\mu H\)) could reach 11.2%, which shows a good performance of the proposed three-coil WPT system on power supply for endoscope micro robot. To sum up, the biggest advantage of the proposed three-coil WPT system is that the mutual inductance \(M_{23}\) between the receiving coil and the load coil is adjustable within a certain range. No matter \(R_{2}\) of receiving coil is large or the load \(R_{L}\) changes, by adjusting \(M_{23}\),\(P_{L}\) can be increased quickly and effectively. At the same time,\(P_{d}\) can be controlled at a low level according to specific requirements.
References
Guo S, Yang Q, Bai L, Zhao Y (2018) Development of multiple capsule robots in pipe. Micromachines 9(6):259–274
Han D, Yan G, Wang Z et al (2020) The modelling, analysis, and experimental validation of a novel micro-robot for diagnosis of intestinal diseases. Micromachines 11(10):896
Mahoney AW, Abbott JJ (2016) Five-degree-of-freedom manipulation of an untethered magnetic device in fluid using a single permanent magnet with application in stomach capsule endoscopy. Int J Robot Res 35(1–3):129–147
Koulaouzidis A, Iakovidis DK, Karargyris A et al (2015) Wireless endoscopy in 2020: will it still be a capsule? World J Gastroenterol WJG 21(17):5119
Kuang S, Yan G (2020) Modelling on mutual inductance of wireless power transfer for capsule endoscopy. Biomed Microdevice 22(3):1–11
Ye C, Wang J, Fang Q (2019) A small wireless power transfer system for the capsule endoscopy. In: 2019 IEEE international conference on integrated circuits, technologies and applications (ICTA). IEEE, 166–167
Jones P, Spendier K, Routt A, et al. (2017) Magnetic field between a pair of solenoid: experiments vs. theory. Bull Am Phys Soc 62. http://meetings.aps.org/link/BAPS.2017.4CF.G1.29
Basar MR, Ahmad MY, Cho J et al (2016) Stable and high-efficiency wireless power transfer system for robotic capsule using a modified Helmholtz coil. IEEE Trans Ind Electron 64(2):1113–1122
Basar MR, Ahmad MY, Cho J, et al. (2015) Performance evaluation of power transmission coils for powering endoscopic wireless capsules. In: 2015 37th annual international conference of the IEEE engineering in medicine and biology society (EMBC). IEEE, 2263–2266
Basar MR, Ahmad MY, Cho J, Ibrahim F (2018) An improved wearable resonant wireless power transfer system for biomedical capsule endoscope. IEEE Trans Ind Electron 65(10):7772–7781
Ke Q, Luo W, Yan G, Yang K (2016) Analytical model and optimized design of power transmitting coil for inductive coupled endoscope robot. IEEE Trans Biomed Eng 63(4):694–706
Chyczewski S, Hwangbo S, Yoon YK et al (2019) Experimental demonstration of multi-watt wireless power transmission to ferrite-core receivers at 6.78 MHz. Wirel Power Transf 6(1):17–25
Pengxian PU, Guozheng YAN, Zhiwu W et al (2019) Design and experiment of expanding mechanism and power receiving coil for micro intestinal robot. J Shanghai Jiaotong Univ (Chin Ed) 53(10):1143
Meng Y, Wang Z, Jiang P et al (2020) Optimization and analysis of Helmholtz-like three-coil wireless power transfer system applied in gastrointestinal robots. J Power Electron 20(4):1088–1098
Wojda RP, Kazimierczuk MK (2013) Analytical optimization of solid-round-wire windings conducting dc and ac non-sinusoidal periodic currents. IET Power Electron 6(7):1462–1474
Hui SYR (2018) Technical and safety challenges in emerging trends of near-field wireless power transfer industrial guidelines[J]. IEEE Electromagnetic Compatibility Magazine 7(1):78–86
Ke Q, Jiang P, Yan G (2017) Standardized design of the transmitting coils in inductive coupled endoscope robot driving systems. J Power Electron 17(3):835–847
Yang Z, Liu W, Basham E (2007) Inductor modeling in wireless links for implantable electronics. IEEE Trans Magn 43(10):3851–3860
Acknowledgements
This research was funded by the National Natural Science Foundation of China (NSFC) (No. 62103263), Science and Technology Innovation Bases of Shanghai (19DZ2255200) and the Shanghai Pujiang Program (20PJ1419300).
Author information
Authors and Affiliations
Corresponding authors
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Han, D., Yan, G., Kuang, S. et al. Preliminary Study on a Three-coil Wireless Power Transfer System for Endoscope Micro-robot of Intestinal Diagnosis: Design, Optimization and Validation. J. Electr. Eng. Technol. 17, 2213–2224 (2022). https://doi.org/10.1007/s42835-022-01022-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42835-022-01022-5