
Abstract
This paper presents the application of interval type-2 fuzzy logic controller (IT2FLC) in ATMD for the response control of a building considering soil–structure interaction (SSI). One of the main constraints of the current fuzzy systems is their inability to consider uncertainty in fuzzy rules. Interval type-2 fuzzy systems have the ability to handle this deficiency. It also takes into account uncertainty in loading and structural behavior. To evaluate the influence of soil types on the behavior of structure, an 11-story shear building is used. This structure has been analyzed under the earthquake excitations recommended by the International Association of structural control (IASC) committee. The uncontrolled and controlled responses of structure with ATMD through IT2FLC are calculated with and without SSI effects. Numerical results indicate that SSI would significantly affect the structural response of the building. It is also found that when a structure is built on soft soil sites, the effectiveness of ATMD with IT2FLC in the case of suppressing the structural response is increased.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The response reduction of a building against natural hazards such as earthquake and strong winds has been of primary interest to civil engineers. Therefore, considerable studies have been done in structural control against these kinds of dynamic forces. In the last three decades, structural control devices, passive as well active, have been developed for decreasing the damage and structural response. Among them, TMD is one of the oldest passive devices which has attached the attention of many researchers (Ayorinde et al. 1980; Warburton 1982; Villaverde 1985; Sadek et al. 1997; Leung et al. 2008, 2009; Marano et al. 2010; Bekdas et al. 2011; Nigdeli et al. 2013; Farshidianfar et al. 2013a, b; Meshkat Razavi et al. 2015). When the structure is excited by strong earthquakes with high frequency content, the performance of TMD can be decreased. To improve the effectiveness of TMD, an active control force is implemented between the structure and TMD through actuator according to a specified control algorithm (Yao 1972). One of the main advantages of this new device (ATMD) is its strong capacity for mitigating the structural response. The capability of ATMD mainly depends on the TMD and controller characteristics. Also, the motion of ATMD correlated to structural behavior. If the height and flexibility of the building increased, the effectiveness of ATMD is increased. One of the main constraints of ATMD is its dependency on a continuous power supply. However, significant progress has been made on the application of ATMD in structural control in recent decades and has been extensively studied by many researchers (Chang et al. 1980; Abdel-Rohman 1984; Battaini et al. 1998, 2004; Al-Dawod et al. 2006; Pourzeynali et al. 2007; Guclu et al. 2008; Shariatmadar et al. 2014). Researchers have also developed a new class of TMD which is called semi-active. In the mentioned studies, different control algorithms are used for generating control force in ATMD. Some of these methods are mathematical calculation based such as LQR, pole assignment, H2, bang–bang and GA methods.
In other studies, intelligent algorithms such as fuzzy are used to apply the proper control force in actuator. The reason for this extensive attention is the specific features of the fuzzy systems. The fuzzy system considers uncertainties in input excitation and nonlinearities in structural behavior. Also, fuzzy is independent to mathematical model and it operates using human experience.
Battaini et al. (1998) first studied the application of fuzzy system in the controller of an ATMD for generating the active control force in its actuator. They used the ATMD with fuzzy controller on the top floor of a three-story benchmark building under earthquake excitations. They also applied ATMD with fuzzy controller on the roof level of a 16-story benchmark structure under wind loading (Battaini et al. 1998). They indicate how fuzzy can be implemented in structural control. Al-Dawod et al. (2006) evaluate the efficiency of ATMD for vibration control of a five-story benchmark building. This building is subjected to different types of excitations including along and cross wind loads and earthquake acceleration. In the mentioned studies, ATMD with fuzzy controller is used and the results showed that the FLC has a better performance than LQG controller. Pourzeynali et al. (2007) used genetic algorithm (GA) for optimizing ATMD parameters which is placed on the last floor of an 11-story shear building. They suggested a combined application of GA and FLC for vibration control of the aforementioned building. The results showed that FLC has a better performance in comparison with LQR method in reducing the structural response. Guclu and yazici (2008) applied fuzzy controller in an ATMD which is placed on the roof level of a 15-story shear building. This controller has been comprised with PD controller and the results indicated the high effectiveness of FLC to PD controller when subjected to the Kocaeli earthquake acceleration. Shariatmadar and Meshkat-R (2014) applied optimized FLC in ATMD for the response control of an 11-story building. They used PSO for optimizing the FLC parameters. The results showed that suggested controller decreases more than that of the FLC. Shariatmadar and Golnargesi (2014) for the first time studied the application of interval type-2 FLC (IT2FLC) in ATMD for the response control of a high rise building. One of the main constraints of common fuzzy system (type-1 FLS) is their inability to consider uncertainties in the information needed for create fuzzy rules. IT2FLS has the ability to consider this deficiency. They indicated that proposed controller is quite effective in response reduction of building compared with that of obtained by type-1 FLC. Chandiramani (2016) used a TMD with MR damper and variable stiffness to control wind-seismic excited building and optimal static output feedback control method is applied to generate the control force in semi-active TMD. The results revealed that the response of structure reduced significantly with the mentioned controlling method. Yang et al. (2017) used an active mass damper with negative acceleration feedback control algorithm, and the effectiveness of proposed control method was tested by a SDOF system. The results show that the stability of controlling method is static and damping of goal mode can be increased.
Reviewing previous works on the application of ATMD in reducing the structural response show that the past studies on ATMD have not considered the effects of the altered properties of structure due to soil–structure interaction. Since soil type greatly affects the response of structure, the SSI should be considered for investigating the behavior of building with ATMD under seismic excitations.
This study presents the application of IT2FLC for generating active control force in ATMD to reduce the structural response including soil–structure interaction. To examine the effects of soil types on the response of structure, an 11-story shear building is used. The building is subjected to different earthquake excitations including both far-field and near-field records. First, the uncontrolled responses are calculated when the building is built on different soil sites. Then, the controlled responses of structure with ATMD through IT2FLC are computed with and without considering SSI effects. The results show that the soil characteristics have important influences on the structural behavior and SSI greatly affects the uncontrolled and controlled response of structure.
Structural model
An N-story shear frame building with an ATMD on the top floor considering an SSI effect is shown is Fig. 1.

N-story building with an ATMD on the roof level considering soil–structure interaction
This structure is modeled as (N + 3)° of freedom system. Moment of inertia and mass of each floor are indicated as Ii and Mi, and those of foundation are I0 and M0, respectively (Shown in Fig. 1). The swaying and rocking soil damping are represented as CS and Cr, and the corresponding soil stiffness are KS and Kr, respectively. These parameters can be obtained from soil properties and radius of foundation (Wolf 1989).
X0 and θ0 are defined as the displacement and rotation of foundation, respectively, and displacement of i’th story is indicated as Xi. The equation of motion for the proposed system under seismic excitation is given as follows:
where, M, K and C, are the mass, stiffness and damping matrices of the structure with ATMD, respectively. X (t) is a vector included the horizontal displacement of stories, ATMD and foundation as well as rotation of foundation. m* is the acceleration mass matrix and ag is the earthquake excitation. Ef is a vector indicates the location of control force.
M, K, C and m* matrices along with X (t) and Ef vectors are given by following equations:
The other parameters used in the above equations are as follows:
Equation 1 can be written in the standard state-space form as follows:
where, X is a vector of size 2*(N + 3). A, Bf and Bg are defined by the following equations:
The responses of system for different degrees of freedom can be determined by solving Eq. 12.
Interval type-2 fuzzy logic systems (IT2FLS)
Interval type-2 fuzzy system (IT2FLS) is a more complete form of common type-1 fuzzy system. In fact, type-1 fuzzy is a subset of type-2 fuzzy sets. A usual type-1 membership function (MF) is shown in Fig. 2. A MF is used to a map each point in input space to a value between 0 and 1. The most shortcoming of this type of membership functions is their inability to take uncertainties. To overcome this disadvantage, interval type-2 fuzzy MF can be used.

An example of type-1 membership function
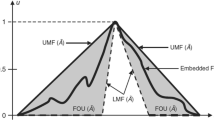
As shown in Fig. 3, each interval type-2 MF is composed of a lower membership function and an upper membership function. The space between this two bounding functions is called footprint of uncertainty (FOU), as seen in Fig. 2. FOU overcome the mentioned deficiency associated with type-1 MFs.

An example of interval type-2 membership function
A typical IT2FLS is composed of five parts as fuzzifier, fuzzy rule base, fuzzy inference engine, type reducer and defuzzfier. The flowchart depicting the IT2FLC is shown in Fig. 4.

IT2FLC structure
Fuzzifier transforms the input data into fuzzy set by the means of upper and lower MFs. In the present study, singleton fuzzifier was used for fuzzification process (Fig. 5).

MFs of input and output variables

Flowchart of IT2FLC algorithm
Inference engine with the help of rule bases maps the upper and lower input fuzzified sets into the corresponding fuzzy output sets.
The deffuzification process has two steps. First, the output type-2 fuzzy sets are converted into type-1 fuzzy sets by the means of type reducer. In this study, the center of set (COS) type reducer has been used (Karnik et al. 1998, 1999, 2001). The COS type reducer is an interval set which is determined by left-end point (yl) and right-end point (yr). At the second step, the defuzzified values which are obtained from type reducer are averaged by the following equation:
IT2FLC design
The main purpose of this study is to show the efficiency of IT2FLC for an ATMD in a real building while SSI is considered. To achieve this goal, Matlab Simulink is used. IT2FLC uses the top floor displacement and velocity as the input variables to produce the active control force as the output variable with seven upper and lower MFs. The input and output MFs are depicted in Figs. 7 and 8, respectively. The fuzzy inference engine consisting from set of rules which are given in Table 1. These rules are developed by the expert’s knowledge. Each rule comprised some fuzzy variables. The abbreviation’s description of fuzzy variables is shown in Table 2 and specifications of IT2FLC have been given in Table 3.

Time histories of the scaled ground accelerations used: a El Centro; b Hachinohe; c Kobe; d Northridge

Simulink model for the 11-story building with IT2FLC controller
The equations of fuzzy input variables’ membership functions can be written as follows:
Fuzzy output variables’ MFs are given by the following equations:
Briefly, the flowchart of IT2FLC algorithm can be shown in Fig. 6.
The reference value is selected in such a way that the structure is in neutral position. In this situation, the displacement and velocity of the top floor are zero.
Illustrative example
An 11-story shear building laying on different ground states (soft and dense soil) with an ATMD on the top floor is chosen as the reference building. IT2FLC is selected as the ATMD controller. The control force is generated through an actuator which is installed between the structure and ATMD.
The properties of the building are provided in Table 4 (Pourzeynali et al. 2007). Mass, damping and frequency ratio of ATMD are 0.03, 0.07 and 1, respectively (Pourzeynali et al. 2007) and IT2FLC is used for generating active control force.
To investigate the effectiveness of IT2FLC in seismic applications, four different ground accelerations are used in numerical simulations. These seismic excitations which are suggested by the international association for structural control (IASC). These earthquakes are used to check the efficiency of any control system for seismic application. They are El Centro, Hachinohe, Kobe and Northridge earthquakes. The peak ground absolute accelerations (PGAs) of these earthquake records are 0.3417 g, 0.2250 g, 0.8267 g and 0.8178 g, respectively. The four mentioned acceleration records, but scaled in intensity, are used in this study. The earthquake records used are El Centro and Hachinohe with original intensity, Kobe with 40% of its original and Northridge with 30% of its original intensity as shown below (Samali et al. 2003).
The two important kinds of ground states, including soft and dense soils are examined in this study. The soil and foundation properties are presented in Table 5 (Wolf 1989).
The simulation analysis has been performed by Matlab Simulink (See Fig. 8).
Results and discussion
The structural performance of a building is checked from two points of view, structural safety and residential comfort. In this study, two criteria including the maximum horizontal displacement and acceleration of the building stories, and the corresponding RMS’s are selected to check the uncontrolled and controlled responses of the building lying on two different beds (soft and dense soils). The results are presented in two distinct parts. The first part discusses the displacement response of the building and the second part provided the acceleration results.
Displacement results
Figure 9 shows the peak displacement response of the uncontrolled model and the model with ATMD for various ground state types.

Controlled and uncontrolled peak displacement responses of floors for various ground states and different earthquakes a El Centro; b Hachinohe; c Kobe; d Northridge
From Fig. 9, it can be seen that the uncontrolled response of the building lying on dense soil is very close to the response of the fixed base structure. Also, it can be observed that the soft soil has important effect on the uncontrolled response of the building in such way that the structure with soft soil bed decreases the uncontrolled peak response of the top floor of the fixed base structure with about 10, 9, 10 and 13% for the El Centro, Hachinohe, Kobe and Northridge earthquakes, respectively. The controlled response of building with ATMD system using IT2FLC for the dense and soft soils support is also shown in Fig. 9. The results show that the ATMD with IT2FLC reduces the peak responses of structure. From the results, it can be understood that ATMD decreases the top floor displacement of building in the case of dense ground state with respect to its uncontrolled responses to about 45, 51, 48 and 12% for El Centro, Hachinohe, Kobe and Northridge earthquakes, respectively. The corresponding reduction for the building lying on the soft soil is about 50, 55, 47 and 5% for the aforementioned earthquakes, respectively. Comparing the displacement response reductions for two soil types revealed that as the soil is softer, the efficiency of ATMD is improved for all the earthquake excitation except Northridge record.
It is clear that when the controlled structure is built on soft soil, damping of the system is increased. If such a system is excited by a pulse-like earthquake excitation, the influence of added damping would be small as in the case of Northridge excitation. From the results, it can be seen that the effect of added damping in combined system is significant for all the other ground accelerations. This is due to the fact that these ground motions (El Centro, Hachinohe and Kobe) are nearly, harmonic over many cycles.
The results of soft soil show that ATMD system reduces the top floor displacement with an average about 5% more than that of the dense soil for the mentioned earthquakes. According to Fig. 9, it can be concluded that the most and least response reduction value is obtained in soft soil for the Hachinohe and Northridge earthquakes, as about 55 and 5%, respectively.
In the last part of displacement results, the RMS displacement of stories is compared in two modes of uncontrolled and controlled systems for different ground state cases and different earthquake excitations (Fig. 10).

Controlled and uncontrolled RMS displacements of stories for various ground states and different earthquakes a El Centro; b Hachinohe; c Kobe; d Northridge
As can be seen from Fig. 10, there is a close relationship between the RMS response and soil characteristics. Results show that the uncontrolled RMS displacement of fixed base building is reduced when the structure is built on soft soil. By reviewing the controlled RMS responses, it can be concluded that the stiffer soil reduces the RMS displacement of stories with respect to its uncontrolled responses, more than that of the soft soil. Table 6 shows the mentioned RMS displacement reduction of the top floor for soft and dense soils in the case of using IASC earthquakes.
From Table 6, it is understood that ATMD with IT2FLC is not effective in reducing the controlled RMS displacement of top floor in both type of soils for the Northridge records. Furthermore, the maximum and minimum RMS response reductions are belonged to the El Centro and Northridge earthquakes, respectively.
Acceleration results
This section discusses the results of the absolute acceleration of building’s stories. The peak acceleration of stories of uncontrolled and controlled structure is compared in different cases including soft and dense soil as shown in Fig. 11.

Controlled and uncontrolled peak absolute acceleration responses of floors for various ground states and different earthquakes a El Centro; b Hachinohe; c Kobe; d Northridge
According to Fig. 11, it can be observed that soft soil decreases the uncontrolled peak acceleration of the top floor of the fixed base structure to about 4.6, 4.9, 6 and 8.4% for the El Centro, Hachinohe, Kobe and Northridge earthquakes, respectively.
The peak acceleration of stories of controlled building with ATMD through IT2FLC for two kinds of ground states is also shown in Fig. 11. The controlled acceleration results indicate that effectiveness of ATMD with IT2FLC for both types of soil in term of reducing the peak responses with respect to its uncontrolled cases is identical for El Centro, Hachinohe and Kobe earthquake excitations and is about 33, 57 and 50%, respectively. Results of Northridge earthquake are slightly different from those obtained by the other ground accelerations and the response reduction of top floor is about 26 and 31% for soft and dense soil, respectively.
The RMS acceleration of stories is also calculated to compare the uncontrolled and controlled RMS’s of floors with its uncontrolled case for various soil types and different ground accelerations (Fig. 12).

Controlled and uncontrolled RMS accelerations of stories for various ground states and different earthquakes a El Centro; b Hachinohe; c Kobe; d Northridge
The results indicate that uncontrolled RMS response reduction of building constructed on soft soil is greater than that of obtained by dense soil.
This trend is quite different for the controlled RMS acceleration of the building’s floors and the response reduction of dense soil in comparison with its uncontrolled case is more than that of obtained by soft soil. The percentage reduction in RMS acceleration of top floor is provided in Table 7 for different soil kinds and various earthquake excitations. According to Table 7, it is can be seen that the controlled RMS response reduction of dense soil is more than that of the soft soil.
By reviewing and comparing the displacement and acceleration results, it is realized that the uncontrolled and controlled response reduction of displacement is more than that of the acceleration. This is due to that the controller parameters are designed based on displacement criteria.
Conclusion
This is the first study on the application of IT2FLC in ATMD for response reduction of buildings, considering soil–structure interaction (SSI) effects. The past studies on ATMD used for seismic response control of structures have not considered the effects of structural altered properties due to SSI.
In this paper, simulation analysis of an 11-story shear building with an ATMD on the top floor is conducted to investigate the effects of state ground properties on uncontrolled and controlled responses of structure. Numerical results indicated that:
-
1.
Soil characteristics greatly affect the behavior of structure in two modes of uncontrolled and controlled with ATMD through IT2FLC.
-
2.
The soil with lower stiffness reduces the uncontrolled responses more than those obtained by dense soil.
-
3.
ATMD through IT2FLC decreases the peak displacement of top floor with an average about 48 and 51% for dense and soft soils, respectively, for the all ground accelerations except Northridge record.
-
4.
The controlled peak acceleration of top floor is decreased with about 40% for both soil types and all earthquake results.
-
5.
The controlled RMS responses of displacement and acceleration of top floor can be significantly decreased when the structure is built on dense soil.
Change history
20 June 2018
This paper presents the application of interval type-2 fuzzy logic controller (IT2FLC) in ATMD for the response control of a building considering soil–structure interaction (SSI).
References
Abdel-Rohman, M. (1984). Optimal design of active TMD for buildings control. Journal of Building and Environment, 19(3), 191–195.
Al-Dawod, M., Samali, B., & Li, J. (2006). Experimental verification of an active mass driver system on a five-storey model using a fuzzy controller. Structural Control and Health Monitoring, 13(5), 917–943.
Ayorinde, E. O., & Warburton, G. B. (1980). Minimizing structural vibrations with absorbers. Journal of Earthquake Engineering & Structural Dynamics, 8(3), 219–236.
Battaini, M., Casciati, F., & Faravelli, L. (1998). Fuzzy control of structural vibration. An active mass system driven by a fuzzy controller. Journal of Earthquake Engineering & Structural Dynamics, 27(11), 1267–1276.
Battaini, M., Casciati, F., & Faravelli, L. (2004). Controlling wind response through a fuzzy controller. Engineering Mechanics, 130(4), 486–491.
Bekdas, G., & Nigdeli, S. M. (2011). Estimating optimum parameters of tuned mass dampers using harmony search. Journal of Engineering Structures, 33(9), 2716–2723.
Chandiramani, N. K. (2016). Semiactive control of earthquake/wind excited buildings using output feedback. Journal of Procedia Engineering, 144, 1294–1306.
Chang, J. C. H., & Soong, T. T. (1980). Structural control using active tuned mass dampers. Engineering Mechanics, 106(6), 1091–1098.
Farshidianfar, A., & Soheili, S. (2013a). Ant colony optimization of tuned mass dampers for earthquake oscillations of high-rise structures including soil–structure interaction. Journal of Soil Dynamics and Earthquake Engineering, 51, 14–22.
Farshidianfar, A., & Soheili, S. (2013b). ABC optimization of TMD parameters for tall buildings with soil structure interaction. Journal of Interaction and Multiscale Mechanics, 6(4), 339–356.
Guclu, R., & Yazici, H. (2008). Vibration control of a structure with ATMD against earthquake using fuzzy logic controllers. Journal of Sound and Vibration, 318(1–2), 36–49.
Karnik, N.N. and Mendel, J.M., (1998), Type-2 fuzzy logic systems: type-reduction. In: systems, man, and cybernetics, IEEE International Conference on.
Karnik, N. N., & Mendel, J. M. (2001). Centroid of a type-2 fuzzy set. Journal of Information Sciences, 132(1–4), 195–220.
Karnik, N. N., Mendel, J. M., & Liang, Q. (1999). Type-2 fuzzy logic systems. IEEE Transactions on Fuzzy Systems, 7(6), 643–658.
Leung, A. Y. T., & Zhang, H. (2009). Particle swarm optimization of tuned mass dampers. Engineering Structures, 31(3), 715–728.
Leung, A. Y. T., et al. (2008). Particle swarm optimization of TMD by non-stationary base excitation during earthquake. Journal of Earthquake Engineering & Structural Dynamics, 37(9), 1223–1246.
Marano, G., Greco, R., & Chiaia, B. (2010). A comparison between different optimization criteria for tuned mass dampers design. Sound and Vibration, 329(23), 4880–4890.
Meshkat Razavi, H., & Shariatmadar, H. (2015). Optimum parameters for tuned mass damper using shuffled complex evolution (sce) algorithm. Journal of Civil Engineering Infrastructures Journal, 48(1), 83–100.
Nigdeli, S., & Bekdas, G. (2013). Optimum tuned mass damper design for preventing brittle fracture of RC buildings. Journal of Smart Structures and Systems, 12(2), 137–155.
Pourzeynali, S., Lavasani, H. H., & Modarayi, A. H. (2007). Active control of high rise building structures using fuzzy logic and genetic algorithms. Journal of Engineering Structures, 29(3), 346–357.
Sadek, F., et al. (1997). A method of estimating the parameters of tuned mass dampers for seismic applications. Journal of Earthquake Engineering & Structural Dynamics, 26(6), 617–635.
Samali, B., & Al-Dawod, M. (2003). Performance of a five-storey benchmark model using an active tuned mass damper and a fuzzy controller. Engineering Structures, 25(13), 1597–1610.
Shariatmadar, H., & Razavi, H. M. (2014). Seismic control response of structures using an ATMD with fuzzy logic controller and PSO method. Journal of Structural Engineering and Mechanics, 51(4), 547–564.
Shariatmadar, H., Golnargesi, S., & Akbarzadeh Totonchi, M. R. (2014). Vibration control of buildings using ATMD against earthquake excitations through interval type-2 fuzzy logic controller. Asian Journal of Civil Engineering (Bhrc), 15(3), 321–338.
Villaverde, R. (1985). Reduction seismic response with heavily-damped vibration absorbers. Journal of Earthquake Engineering & Structural Dynamics, 13(1), 33–42.
Warburton, G. B. (1982). Optimum absorber parameters for various combinations of response and excitation parameters. Journal of Earthquake Engineering & Structural Dynamics, 10(3), 381–401.
Wolf, J. P. (1989). Soil–structure-interaction analysis in time domain. Journal of Nuclear Engineering and Design, 111(3), 381–393.
Yang, D. H., et al. (2017). Active vibration control of structure by active mass damper and multi-modal negative acceleration feedback control algorithm. Journal of Sound and Vibration, 392, 18–30.
Yao, J. T. P. (1972). Concept of structural control. Structural Division, 98(7), 1567–1574.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Golnargesi, S., Shariatmadar, H. & Razavi, H.M. Seismic control of buildings with active tuned mass damper through interval type-2 fuzzy logic controller including soil–structure interaction. Asian J Civ Eng 19, 177–188 (2018). https://doi.org/10.1007/s42107-018-0016-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42107-018-0016-5