
Abstract
There has been no perfect methodology for directional relaying in a series capacitor-compensated double-circuit transmission (SCCDCT) line until now. As it is crucial to protect the SCCDCT line from inevitable fault consequences, intelligent techniques must be employed for immediate fault directional relaying. In this work, a fuzzy expert system (FES) is developed for non-unit protection in the SCCDCT line, due to its capacity for efficient handling of linguistic data. The validity of the proposed methodology is tested by simulating a 400 kV existing Indian SCCDCT network in MATLAB software. The suitable fault zones/sections, phase, and location are identified using a phase angle component, zero sequence component, and Haar wavelet transform currents. The simulations indicate that the proposed methodology is able to correctly detect the faulty section. Also, it precisely estimates the fault distance and classification, as the maximum recorded error and accuracy for faults remain within ± 0.232% and above 99.98%, respectively. Finally, a comparison of the proposed methodology with related protection methodologies clearly demonstrates its superiority. This routine protection methodology is sufficiently rapid, discriminative, enormously reliable, robust, and incredibly responsive for isolating the targeted fault.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Over the last few decades, the need for electrical energy has grown substantially worldwide, and energy is delivered from power stations to load centers through transmission and distribution systems. Transmission systems are continuously exposed to various faults. Hence, when faults occur in a system, it is vital to accurately and quickly pinpoint and isolate the faulty zone so that the remaining system can continue operation. Various benefits are gained by utilizing fault location in power systems, including increased power availability, reduced maintenance times, prevention of future accidents, and improved power quality. Fault location estimation has garnered growing interest among protective elements in the last few years.
In power systems, increasing the capacity and reliability of transmission lines is of particular importance. Recently, energy companies have used a series capacitor-compensated double-circuit transmission (SCCDCT) line to handle their power transfer capacity [28]. In their work, Gajare and Pradhan [14] optimized the SCCDCT line configuration for the required tasks by estimating the parameter values. The majority of protection schemes in SCCDCT reported in the literature are based on unsynchronized measurements [15], phase voltage–current [3, 8, 19, 40], impedance [10, 24, 25, 27], and phasor measurement [35], and there have been few studies focusing only on the location of the SCCDCT line. Researchers have found that a lack of mature technology for directional relaying and classification is impeding progress regarding the SCCDCT line. Thus, the authors have undertaken an assessment of the non-unit protection in a SCCDCT line.
With the rapid development of computing methods, the application of neural networks (NN) has been concentrated on several operation modes, i.e., directional relaying [5, 23, 37], classification [11, 43], and location [16, 41]. Recently, support vector machines (SVM) have been developed, such as directional relaying [33, 39], classification [6, 30, 34, 36], and location [9, 42]. Directional-based relaying techniques have also been reported in the literature [1, 2, 17], and several studies [12, 13, 18] have suggested including directional relaying, phase classification, and location. Nevertheless, the above methods have several difficulties, mainly inaccuracies and complexity, which require a huge volume of training data and extra computing time. In this context, an optimized Haar wavelet and a fuzzy expert system (FES)-based protection methodology in SCCDCT is the focus of the present study, which involves directional relaying, phase classification, and location.
In Refs. [22, 38], different schemes for shunt faults were explored using a Haar wavelet. The FES methodology was proven successful in various tasks including pattern recognition, classification, control, robotics, and detection. Mishra and Yadav [26] assessed the FES method for shunt faults, demonstrated using the current and voltages at the single end of the SCCDCT. In Naresh Kumar et al. [21] and Kavaskar et al. [20], the authors suggested a way to determine the location of faults using FES, which was implemented to assess the directional relaying, phase classification, and location [4, 31]. The modeling of control systems operating in a fuzzy tool environment is not solved effectively in the literature with MATLAB [4, 20, 21, 26, 31]. Although it seems that the FES approach is trending and makes it easy to find optimal configurations, there are still challenges in the FES process. Authors have addressed the new notion of a fuzzy-based inference system in LabVIEW [7, 29, 32].
Though various feature extraction techniques have been used in the literature with regard to transmission line protection, no technique is able to sufficiently reduce location error and computational burden. Nevertheless, none of the studies have presented a solution to discriminate SCCDCT line faults without complex efforts considering Haar wavelet currents and FES methodology. Thus, a novel section identification methodology using FES is the focus of this study. The present work is also extended to monitor fault location and classification. The salient features of the current work can be summarized as follows:
-
(1)
The purpose of this study is to enhance the reach setting and accuracy and minimize maximum recorded error (MRE).
-
(2)
The methodology is not significantly affected by several fault sections, types, locations (L), fault resistance (R), level of compensation (% X), and incipient instance (I) changes.
-
(3)
The methodology dissuades the awareness of multi-terminal data.
-
(4)
The speed of this methodology is high.
-
(5)
The methodology can be used to elucidate computationally complex problems.
The proposed paper is organized as follows. Section 2 outlines a SCCDCT line, the fault analysis, and input signal feature extraction. Section 3 contains the FES methodology of non-unit protection. Section 4 describes the test results, merits of the result, and comparisons. Finally, Sect. 5 concludes the study.
2 Power system under study
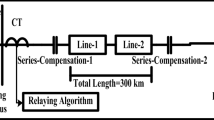
The single-line diagram for the SCCDCT line used to simulate numerous fault cases in this study is depicted in Fig. 1. It is a 200 km, 400 kV, and 50 Hz transmission line. This SCCDCT line is modeled and validated in MATLAB and LabVIEW, respectively. The level of series compensation (% X) selected is 55%. It consists of a doubly fed SCCDCT system in which source-1 is a generating plant consisting of a 250 MVA generator, and source-2 is the interconnected grid. The line between bus B1 and bus B2 is 100 km long, and the line between bus B2 and B3 is also 100 km long. All the optimization problems in this study are solved using MATLAB software. The fuzzy logic toolbox provided in LabVIEW is used to develop the fuzzy systems. A laptop with a high-speed processor was used to execute all the programs. Figure 2 represents the proposed study.

The fault simulation on the SCCDCT line

Flow chart of the proposed methodology
Four fixed series capacitor banks are located in circuit 1 and circuit 2 of the SCCDCT line. The series capacitor consists of a metal oxide varistor (MOV) for protection of the capacitor from over-voltages, and the MOV protection level needed to protect the capacitor is three times that of nominal capacitor voltages. The MOV consisting of zinc oxide discs are in parallel connection with the capacitor banks and provide nonlinear V–I characteristics. They are protected with a MOV as well as triggered forced spark gap. The MOV behavior during faults is nonlinear, depending on fault current value through the series capacitor. With the beginning of a fault, the nonlinear operation of the MOV in the SCCDCT causes malfunction of the technique. The insertion of a series capacitor in the SCCDCT line with an over-voltage protective MOV makes the protection arrangement more difficult. It may lead to inadvertent function of the technique for a fault outside the working zones. Thus, the effect of the MOV in the simulation was considered. In case of a faulty condition, current in capacitor bank is high; thereby the capacitor voltage increases. As long as the capacitor voltage is less than the threshold value, the MOV provides excessive resistance; alternatively, when the capacitor voltage becomes more than the threshold value, the MOV resistance value becomes too small. The SCCDCT parameters are given in Table 1.
Haar wavelets are the simplest possible wavelets. These are the sequence of rescaled square-type functions in mathematics which are combined to form the wavelet family. This analysis allows an output function over a period to be indicated in the form of an orthonormal family. These are now recognized as the first wavelet family and are widely used in many applications. They require additions only and are not for multiplications. In the Haar matrix, most of the elements are zeros. Input and output lengths are the same, and thus the computational time is much shorter than that of other wavelets. They can analyze the frequency component of input signals and the localized feature of signals owing to the orthogonal property. The main feature of this wavelet is the analysis of signal with sudden transitions, viz. monitoring of tool failures in machines and fast computation. Thus, the proposed work is focused on Haar wavelets. Here, the third level of Haar wavelets is used for feature extraction (i.e., detailed coefficients and approximated coefficients) from the currents obtained from the SCCDCT line simulation. To predict the directional relaying, input–output variables are simulated according to the fault cases. Standard Haar wavelets can be expressed as
3 Fuzzy expert system methodology
The FES has pervaded a myriad of fields including management, business, engineering, and science and technology. The fuzzy approach is the most frequently employed technique. FES is conceptually simple. It consists of an input unit, processing unit, and output unit. The input unit maps the input variable to the suitable subset and truth value. Then, the processing unit invokes each if–then rule and gives corresponding results. After that, the results are combined. Lastly, the output unit transforms the combined results back into a precise output value. The core steps in the process, reasoning, and the fuzzy rules are shown in Fig. 3. Development of the proposed study is done on a computer system having specifications of 4 GB of RAM and an Intel Core i5-4005 CPU @1.70 GHZ. This computation runs on LabVIEW software in a fuzzy environment.

The core steps in the FES process
The working models of the FES are presented according to the directional relaying (FES-1), classification (FES-2), and location (FES-3). Three FES models are considered. In the first FES model (FES-1), the phase angle is established as the input, whereas the fault in section is implemented as the output. In the second model (FES-2), seven Haar wavelet currents and a zero sequence component information are established as the inputs, whereas the faulted phases in two circuits and ground is implemented as the outputs. In the third model (FES-3), six Haar wavelet currents are established as the inputs, and the faulted location is implemented as the output.
3.1 Fuzzification
Several types of subsets, such as triangular function, Gaussian function, and trapezoidal function, can be used while developing a FES. In this work, a trapezoidal subset and triangular subset are chosen owing to the concise notation and smoothness. The range and subset of the FES models are defined as per the measurement of data attained. For the FES-1, there is input having three subsets. For the FES-2, there are seven inputs each having two subsets. For the FES-3, there are six inputs each having five subsets. The type of model, the number of if–then rules, the number of inputs–outputs, and the subsets are given in Table 2.
3.2 Inference mechanism
The rules can easily be developed according to existence of real data or expert knowledge. The FES model’s linguistic rule base is constructed by considering each combination of inputs–outputs. Therefore, the first FES model (FES-1) has three rules, the second FES model (FES-2) has 22 rules, and the third FES model (FES-3) has five rules. The “and” conjunction is employed in FES-1 and FES-2 model, and the “or” conjunction is employed in FES-3. The rules of FES models are explained below.
3.3 Defuzzification
Lastly is the defuzzification, which is employed when it is functional to change the output fuzzy set to a numerical value. Two most common techniques are the maximum and centroid. In the max technique, one of the variables at which the fuzzy subset has its maximum value is selected as the numerical value of outputs. In the centroid technique, which has been employed in this study, the numerical output value is calculated by determining the variable center of gravity value of the subset for a fuzzy value. It enhances the defuzzification efficiency owing to the normal method which determines the two-dimensional function centroid.
4 Experimental results
In this section, performance of this methodology is evaluated using the SCCDCT system. To evaluate the performance of the FES-based methodology, firstly, simulation analysis was conducted. The various indicators for methodology validation were reach setting, accuracy, and MRE as discussed in Tables 3 and 4 and Figs. 4, 5, 6, 7, 8, and 9. In testing the systems, more than 50,000 several case studies were chosen. These studies have been obtained by taking different faulty conditions, as follows:
-
(1)
Various sections such as section-1 and section-2
-
(2)
Various fault types including all faults
-
(3)
Various fault locations such as 1–99 km
-
(4)
Various fault resistances such as 1–90 Ω
-
(5)
Various %X such as 5, 15, 25, 35, 45, and 55
-
(6)
Various fault incipient instants such as 0°–360°
$$ \begin{aligned} & {\text{MRE }}\left( {\text{\% }} \right)\\ &\quad = \frac{{\left| {{\text{Computed fault location }} - {\text{Real fault location}}} \right|}}{{\text{Line Length }}} \\ &\quad\quad \times { }100 \end{aligned} $$(2)

Various sections with (1B-G type, L = 54 km, R = 15Ω, %X = 5, and I = 60°)

Various fault types with (Section-1, L = 21 km, R = 30Ω, %X = 15, and I = 120°)

Various fault locations with (Section-2, 2AC type, R = 45Ω, %X = 25, and I = 180°)

Various fault resistance values with (Section-1, 1ABC-G type, L = 74 km, %X = 35, and I = 240°)

Various %X with (Section-2, 2AB type, L = 92 km, R = 60Ω, and I = 360°)

Various incipient instants with (Section-1, 2C-G type, L = 81 km, R = 75Ω, and %X = 55)
4.1 Performance evaluation of FES-1
Prior to fault classification and location, directional relaying evaluations were done in this subsection. When the system is normal, the output of FES-1 will be zero. If the system is faulty, the output adjusts either 1 or −1 depending on the forward (section-2) and backward (section-1) faults of line, respectively. In Table 3, the test results for some backward and forward faults occurring at several fault sections, types, L, R, %X, and I are tabulated. The protective methodology is able to operate all faults, and it remains stable during normal load condition and fault condition. The results indicate that the proposed methodology has desirable performance in several fault parameters.
4.2 Performance evaluation of FES-2
In this work, correctly and incorrectly classified faults are indicated as 1 and 0, respectively. The performance of this methodology is evaluated for several types of faults with varying test parameters over 20,000 cases, and the results are listed in Table 4. It can be seen that the proposed methodology is able to discriminate between fault condition and normal condition, showing average accuracy of 99.98%. The test results confirm that the application of the proposed methodology for transmission protection is useful for ensuring relay stability in all fault cases with various fault parameters.
4.3 Performance evaluation of FES-3
To completely protect the SCCDCT line, after directional relaying and fault classification determination, it is necessary to find the faulty location. In each parameter, 20,000 case studies including several fault quantity sets have been chosen. In Figs. 4, 5, 6, 7, 8, and 9, some of the test results for several fault sections, types, L, R, %X, and I are tabulated. Figure 4 presents real location and computed location for the remaining parameter constants of various sections (types, L, R, %X, and I). Figure 5 presents real location and computed location for various types of remaining parameter constants (sections, L, R, %X, and I). Figure 6 represents the real location and computed location for various L remaining parameter constants (sections, types, R, %X, and I). Figure 7 presents real location and computed location for various R remaining parameter constants (sections, types, L, %X, and I). Figure 8 presents real location and computed location for various %X remaining parameter constants (sections, types, L, R and I). Figure 9 presents real location and computed location for various I remaining parameter constants (sections, types, L, R, and %X). In the following figures, the MRE of computed fault location is measured as Eq. 2. The MRE in forward faults is within 0.232%; on the other hand, the MRE lies between 0.114 and 0.232% in the case of backward faults. Also, the proposed methodology shows satisfactory performance against fault parameters. It is clearly evident that the proposed methodology can preserve its MRE in practice.
4.4 Comparison
In this section, the reach setting, accuracy, and MRE performance of the FES-based methodology are compared with related works. Quantitative comparison of the suggested methodology with some other intelligent schemes [3, 8, 10, 26,27,28, 40] is illustrated in Table 5. It can be seen that in reported approaches, the reach setting is normally 95–99%, except in [26], in which it is 99.81%. The accuracy is generally 99–99.96% in all reported studies, but it is 99.98% in this work. The MRE of the fault locators presented in [3, 10, 27, 40] is more than 0.5%, while our proposed FES is estimating the faulty location with an MRE of 0.232%. It can be inferred that a NN is complex, which also indicates that it is complex in train models. The experimental results show that the recommended methodology outperforms all other recent methods, with 99.81%, 99.98%, and 0.232% for reach setting, accuracy, and MRE, respectively. The comparison results clearly indicate that the suggested approach produces better results in terms of reach setting, accuracy, and MRE. Hence, a fast, efficient, accurate, stable, and reliable methodology has been presented in this study.
5 Concluding remarks
Conventional directional relaying methodology malfunctions during fault conditions in a SCCDCT lines. To solve this problem, a FES with a Haar wavelet transform-based methodology has been proposed in this study. The proposed methodology consists of three units: determining the fault section, determining the faulty classification, and determining the fault location. The proposed methodology overcomes problems such as the need for line information, synchronizing received data from the two sides of the transmission line, and knowing the fault type that is being presented in the SCCDCT line protection. Simulation results emphasize the efficient performance of this methodology for different fault quantity sets. In addition, the proposed methodology is valid for forward and backward faults. Moreover, the MRE is less than 0.232% for all fault cases. The simulations point out that this methodology is a fast, efficient, accurate, stable, and reliable methodology to determine the three functions.
Abbreviations
- SCCDCT:
-
Series capacitor-compensated double-circuit transmission
- SVM:
-
Support vector machine
- NN:
-
Neural network
- MRE:
-
Maximum recorded error
- MOV:
-
Metal oxide varistor
- MVA:
-
Mega-volt ampere
- R:
-
Resistance
- L:
-
Location
- % X:
-
Degree of compensation
- I:
-
Inception angle
References
Adly, R., Sehiemy, A., Elsadd, M., Abdelaziz, A.Y.: A directional protection scheme during single pole tripping. Electr. Power Syst. Res. 144, 197–207 (2017)
Ahmed, R., Ziad, M.A., Alaa, M.A., Said, A.K., Hala, M.A.M., Shady Abdel, A.H.E.: Enhancing the performance of directional relay using a positive-sequence superimposed component. Electr. Eng. (2020). https://doi.org/10.1007/s00202-019-00896-5
Aleena, S., Praveen, M., Anamika, Y., Almoataz, Y.A.: A non-unit protection scheme for double circuit series capacitor compensated transmission lines. Electr. Power Syst. Res. 148, 311–325 (2017)
Anamika, Y., Aleena, S.: Enhancing the performance of transmission line directional relaying, fault classification and fault location schemes using fuzzy inference systems. IET Gener. Transm. Distrib. 9(6), 580–591 (2015)
Anamika, Y., Yajnaseni, D., Ashok, V.: ANN based directional relaying scheme for protection of Korba-Bhilai transmission line of Chhattisgarh state. Prot. Control Mod. Power Syst. 1, 1–13 (2016)
Bhalja, B., Maheshwari, R.P.: Wavelet-based fault classification scheme for a transmission line using a support vector machine. Electr. Power Compos. Syst. 36, 1017–1030 (2008)
Chinthamani, B., Rajeena Mol, P.T., Kamini, K.P., Sughashini, K.R.: Fuzzy based control using Labview for MISO temperature process. Int. J. Res. Eng. Technol. 1(2), 108–114 (2012)
Coteli, R.: A combined protective scheme for fault classification and identification of faulty section in series compensated transmission lines. Turk. J. Electr. Eng. Comput. Sci. 21, 1842–1856 (2013)
Deng, X., Yuan, R., Xiao, Z., Li, T., Wang, K.L.L.: Fault location in loop distribution network using SVM technology. Int. J. Electr. Power Energy Syst. 65, 254–261 (2015)
Dina Mourad, E.H., Shehab, E.: An enhanced ground fault selection and distance measurement approach for single and double circuit fixed series compensated transmission line. Electr. Power Syst. Res. 187, 1–11 (2020)
Ebha, K., Khushaboo, V., Subhojit, G.: An Improved Fault Detection Classification and Fault Location Scheme Based on Wavelet Transform and Artificial Neural Networks for Six Phase Transmission Line Using Single End Data Only. Springer Plus (2015)
Ebha, K., Khushaboo, V., Subhojit, G.: A Modular neuro-wavelet based non-unit protection scheme for zone identification and fault location in six phase transmission line. Neural Comput. Appl. 28(6), 1369–1385 (2016)
Ebha, K., Raunak, K., Subhojit, G.: Low cost microcontroller based fault detector, classifier, zone identifier and locator for transmission lines using wavelet transform and artificial neural network: A hardware co-simulation approach. Electr. Power Energy Syst. 81, 346–360 (2016)
Gajare, S., Pradhan, A.K.: An accurate fault location method for multi-circuit series compensated transmission lines. IEEE Trans. Power Syst. 32(1), 572–580 (2017)
Izykowski, J., Rosolowski, E., Balcerek, P., Fulczyk, M., Saha, M.M.: Fault location on double circuit series compensated lines using two end unsynchronized measurements. IEEE Trans. Power Deliv. 26(4), 2072–2080 (2011)
Jamil, M., Kalama, A., Ansari, A.Q., Rizwan, M.: Generalized neural network and wavelet transform based approach for fault location estimation of a transmission line. Appl. Soft. Comput. 19, 322–332 (2014)
Jena, P., Pradhan, A.K.: Solution to directional relaying for double circuit line. In: Proceedings of International Conference on Energy, Automation and Signal, Bhubaneswar, Odisha, India. pp. 1–6 (2011)
Jiang, J.A., Chen, C.S., Liu, C.W.: A new protection scheme for fault detection, direction discrimination, classification, and location in transmission lines. IEEE Trans. Power Deliv. 18(1), 34–42 (2003)
Kang, N., Chen, J., Liao, Y.: A fault location algorithm for series compensated double circuit transmission lines using the distributed parameter line model. IEEE Trans. Power Deliv. 30(1), 360–367 (2015)
Kavaskar, S., Nalin Kant, M.: A fuzzy rule base approach for high impedance fault detection in distribution system using morphology gradient filter. J. King Saud Univ. Eng. Sci. 32(33), 177–185 (2020)
Kumar, A.N., Ramesha, M., Jagadha, S., Gururaj, B., Kumar, M.S., Chaitanya, K.: Fuzzy rule-based fault location technique for thyristor-controlled series-compensated transmission lines. IJFIS 21, 391–400 (2021). https://doi.org/10.5391/IJFIS.2021.21.4.391
Kumar, R., Koley, E., Yadav, A. Thoke, A.S.: Fault classification of phase to phase fault in six phase transmission line using Haar wavelet and ANN. In: Proceedings of International Conference on Signal Processing and Integrated Network, Noida, India. pp. 5–8 (2014)
Lahiri, U., Pradhan, A.K., Mukhopadhyaya, S.: Modular neural network-based directional relay for transmission line protection. IEEE Trans. Power Syst. 20(4), 2154–2165 (2005)
Makwana, V.H., Bhalja, B.R.: A new adaptive distance relaying scheme for mutually coupled series compensated parallel transmission lines during inter-circuit faults. IEEE Trans. Power Deliv. 26(4), 2726–2734 (2011)
Makwana, V.H., Bhalja, B.R.: A new digital distance relaying scheme for series-compensated double-circuit line during open conductor and ground fault. IEEE Trans. Power Deliv. 27(2), 910–917 (2012)
Mishra, P.K., Yadav, A.: A single ended fuzzy based directional relaying scheme for transmission line compensated by fixed series capacitor. In: Proceedings of Advances in Intelligent Systems and Computing, Springer, Cham, pp. 749–759 (2020)
Monalisa, B.: Adaptive distance relay algorithm for double circuit line with series compensation. Measurement 53, 206–214 (2014)
Monalisa, B., Bibhuti, B.P., Ashok, K.P.: Directional relaying for double circuit line with series compensation. IET Gener. Transm. Distrib. 7(4), 116–121 (2013)
Mou-Lin, J., Ming-Chun, H.: LabVIEW-based fuzzy controller design of a lighting control system. J. Mar. Sci. Technol. 17(2), 5 (2009)
Muhammad, S., Faisal, M., Muhammad, A., Abdul, Q.K., Sufi, G., Adil, S.K.: High impedance fault detection and isolation in power distribution networks using support vector machines. J. King Saud Univ.-Eng. Sci. (2019). https://doi.org/10.1016/j.jksues.2019.07.001
Naresh Kumar, A., Sanjay, C., Chakravarthy, M.: Mamdani fuzzy expert system based directional relaying approach for six phase transmission line. Int. J. Interact. Multimed. Artif. Intell. 6(1), 41–50 (2020)
Nawfal, S., Alrazaaq, A., Fakhraldeen Hamid, A.: fuzzy self tuning of DC position control based on LabVIEW. AL-Rafdain Eng. J. 17(4), 73–83 (2015)
Parikh, U.B., Das, B., Maheshwari, R.P.: Combined wavelet-SVM technique for fault zone detection in a series compensated transmission line. IEEE Trans. Power Deliv. 23, 1789–1794 (2008)
Parikh, U.B., Das, B., Maheshwari, R.P.: Fault classification technique for series compensated transmission line using support vector machine. Int. J. Electr. Power Energy Syst. 32, 629–636 (2010)
Saha, M.M., Izykowski, J., Rosolowski, E.: Fault location method using measurements of differential relays for parallel transmission lines with series capacitor compensation at both ends. International Conference on Developments in Power Systems Protection, pp. 1–6 (2012)
Seethalekshmi, K., Singh, S.N., Srivastava, S.C.: A classification approach using support vector machines to prevent distance relay mal-operation under power swing and voltage instability. IEEE Trans. Power Deliv. 27(3), 1124–1133 (2012)
Sidhu, T.S., Singh, H., Sachdev, M.S.: Design implementation and testing of an artificial neural network based fault direction discriminator for protecting transmission lines. IEEE Trans. Power Deliv. 10(2), 697–706 (1995)
Silva, K.M., Dantas, K.M.C., Souza, B.A., Brito, N.S.D., Costa, F.B., Silva, J.A.C.B.: Haarwavelet-based method for fast fault classification in transmission line. In: IEEE-Conference, pp. 1–5 (2006)
Swetapadma, A., Yadav, A.: Directional relaying using support vector machine for double circuit transmission lines including cross-country and inter-circuit faults. Electr. Power Energy Syst. 81, 254–264 (2016)
Swetapadma, A., Yadav, A.: An artificial neural network-based solution to locate the multi location faults in double circuit series capacitor compensated transmission lines. Int. Trans. Electr. Energy Syst. 4, e2517 (2018)
Tawfik, M.M., Morcos, M.M.: ANN-based techniques for estimating fault location on transmission lines using Prony method. IEEE Trans. Power Deliv. 16(2), 219–224 (2001)
Ye, L., You, D., Yin, X., Wang, K., Wu, J.: An improved fault-location method for distribution system using wavelets and support vector regression. Int. J. Electr. Power Energy Syst. 55, 467–472 (2014)
Zin, A.A.M., Saini, M., Mustafa, M., Sultan, A.R., Rahimuddin, S.A.: New algorithm for detection and fault classification on parallel transmission line using DWT and BPNN based on Clarke’s transformation. Neurocomputing 168, 983–993 (2015)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Kumar, A.N., Sitharamaiah, N. & Chakravarthy, M. Series capacitor-compensated double-circuit transmission line directional relay system using a fuzzy expert system with a Haar wavelet. Iran J Comput Sci 5, 157–166 (2022). https://doi.org/10.1007/s42044-021-00097-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42044-021-00097-z