
Abstract
Reliability, availability, maintainability and dependability (RAMD) is an engineering tool used to address operational and safety issues of systems solar power generation have recently made a major contribution to the global growth of renewable energy sources. Researchers are particularly involved in improving the efficiency and availability of solar photovoltaic (PV) systems. In addition, an enhanced efficiency block diagram is provided to approximate the RAMD output of four functional grid-connected solar-PV systems. The objective is to develop expressions of reliability, availability, maintainability and dependability so as to predict some reliability metrics of testing the system strength and effectiveness based on the based on Markovian technique and the equations of the subsystems are derived using the Chapman–Kolmogorov method. The impact of subsystems failure and repair rates on reliability, availability, maintainability and dependability is captured. Monitoring the vital subassemblies of a PV system increases the likelihood of not only improving system availability, but also optimizing maintenance costs. Additionally, it will inform the operators about the status of the various subsystems of the system.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Solar-photovoltaic (PV) systems have emerged as one of the world's most commonly contributed clean energy sources. At the end of 2016, they had contributed nearly 303 GW of deployed power globally. The accelerated growth rate of these networks has piqued the appetite of investors, operators, and stakeholders for financial investment, which can be jeopardized by unintended disruptions leading to prolonged downtime times. As a result, more concentrated efforts are expected to ensure that a PV device produces the projected amount of energy. To ensure a reliable forecast of photovoltaic energy generation, reliability, availability, maintainability, and dependability (RAMD) evaluation is conducted for grid-connected solar-PV system planning by Balcioglu et al. (2017) and Baschel et al. (2018). The frequency of system failures in grid-connected PV systems can influence the operation of other interconnected systems, which is why such systems should undergo a detailed reliability reviewed by Kececioglu et al. (1991). The reliability analysis also enables Crow LH to create the most effective maintenance schedule for both the customer and the machine (2004), as well as Crow (2003)
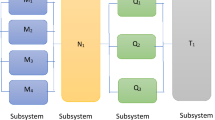
The examined integrated PV system is described as a PV application that hires a customer for a particular purpose (see Fig. 1). Chapman–Kolmogorov differential equations for each of the sub-systems have been derived using the Markov birth–death approach for mathematical simulation of the PV system. Table 1 indicates that both failure and repair rates for each subsystem are considered to be constant. For each subsystem, a state transition diagram has been developed. In each subsystem, unit performance metrics, such as maintainability, availability, durability, mean time to failure (MTTF), mean time to repair (MTTR), and reliability ratio, were obtained by solving corresponding Chapman–Kolmogorov differential equations in steady state using normalizing conditions. The simulation of solar cell operation on an accelerated test basis (under the influence of three crucial meteorological parameters: solar irradiance, temperature, and humidity) permitted the usual running cycle under normal/stress conditions to be demonstrated, determining the initial depreciation time of stressed solar cells. The Weibull most probable statistical repartition was also detected using proper solar cell testing; on this basis, the operating period at which a significant concentration of defects is reached was determined. Gupta et al. (2007) measured the dependability and availability of a plastic pipe manufacturing facility in which all modules were configured in sequence. Using dynamic block diagrams, Distefano and Puliafito (2009) assessed the availability and reliability of dynamic-based architectures (RBDs). FMEA analyses were conducted by Sharma et al. (2011) to increase the reliability of an aircraft engine's rotor support system. Carazas et al. (2011) investigated the availability of a heat recovery steam generator used in thermal power plants. They used failure mode analysis and effect analysis for each variable (FMEA). Upadhya and Srinivasan (2012) used simulation to predict the availability of military systems. Adhikary et al. (2012) conducted a RAM analysis on a coal-fired thermal power plant and calculated a preventive maintenance cycle dependent on efficiency. RAMD technique was recently used by Saini et al. (2020) and Goyal et al. (2019) to identify the most susceptible components of serial processes, such as sugar evaporation systems and water treatment plants. The durability and availability of many industrial systems are investigated by Saini and Kumar (2020), Saini et al. (2020), and Goyal et al. (2019). Craciunescu et al. (2017) study the Optimized management for photovoltaic applications based on LEDs by fuzzy logic control and maximum power point tracking. Nearly zero energy communities. The study regarding the Long-term performance degradation of various kinds of photovoltaic modules under moderate climatic conditions was carried out by Ishii et al. (2011).

The pictorial representation of components of PV system
Dependability is a measure of a system's availability, reliability, maintainability, and, in some cases, other characteristics, such as durability, safety, and security, in systems engineering. Dependability in real-time computing refers to the ability to provide services that can be relied on within a given time frame. Even if the system is subject to attacks or natural failures, the service guarantees must be maintained.
Due to the lack of PV system data, the current paper introduced a reliability modeling approach based on RAMD to study the overall performance of the PV system. In this paper, we present a new photovoltaic system model composed of four subsystems: panel, inverter, battery bank, and control charger.
The objectives of the present study are threefold: First is to develop expressions of reliability, availability, maintainability and dependability so as to predict some reliability metrics of testing the system strength and effectiveness based on the based on Markovian technique and the equations of the subsystems are derived using the Chapman–Kolmogorov method. The second to capture the effect of failure and repair rates on reliability, availability, maintainability and dependability. Third is to determine the most critical subsystem for proper maintenance action to avoid failure. The RAMD technique establishes a relationship between the system's reliability and the reliability of the individual subsystems. According to the analysis presented in this study, subsystem 4 is the most critical. This clearly shows that, of the subsystems in this study, subsystem 4 requires more attention in terms of maintenance to avoid failure.
The paper is organized as follows: Sect. 2 provides the assumptions and description of the system. Section 3 deals with the formulation of the RAMD indices. Discussion of the results obtained and concluding remark are provided on Sect. 4.
2 System description and assumptions
2.1 System description
In this section, a brief description of PV system plant and its subsystem has been given. PV system mainly consists of four components, namely PV modules, controller, batteries, and inverter. All components are arranged in series configuration. The pictorial representation of components is appended in Fig. 1 below.
2.1.1 Subsystem A (solar module)
There are five units of solar panel which are connected to the following unit in series. Out of which three are consecutively in operation. Failure of two units in this subsystem leads to system failure.
2.1.2 Subsystem B (charge controller)
There is one unit of charge controller which is connected to the following unit in series. Failure of this unit leads to system failure.
2.1.3 Subsystem C (battery)
This subsystem has one unit of battery which is connected in series to other subsystem. This unit's failure causes complete system failure.
2.1.4 Subsystem D (inverter)
It consists of one unit of inverter. This unit's failure causes complete system failure as it is connected to the following unit in series.
2.2 Assumptions
-
1.
Each subsystem's failure and repair rates are distributed exponentially.
-
2.
The Failure and repair rates are statistically independent of one another.
-
3.
There are no concurrent faults in the subsystem.
-
4.
There are plenty of maintenance and replacement options. Repairmen are still present in the factory, and the restored machine performs as well as new.
-
5.
The standby subsystem switchover systems are flawless.
The RAMD indices for subsystems of PV system plant are computed as.
3 RAMD indices for solar components
3.1 RAMD indices for solar panels S1
This subsystem has two units only. Failure of the two units leads to complete system failure. The transition diagram and Chapman–Kolmogorov differential equations associated with it is are given as (Fig. 2):

Transition diagram of PV panels
Under steady state, Eq. (1–4) reduces to
Using normalization condition
\(P_{0} + P_{1} + P_{2} + P_{3} = 1\).
Substituting (5) and (6) into (7), we have
Table 4 contains important device output metrics that have been extracted.
3.2 RAMD indices for charge controller S2
This subsystem only has one unit. Its failure causes the whole system to crash. The transformation diagram and Chapman–Kolmogorov differential equations that go with it are as follows (Fig. 3):

Transition diagram of charge controller
Under steady state, Eq. (9) and (10) reduce to
Now using normalization condition
Substituting (12) into (13), we have
Table 4 summarizes key system performance metrics that have been derived.
3.3 RAMD indices for battery S3
There is only one device in this subsystem. When it fails, the whole machine fails. The corresponding transformation diagram and Chapman–Kolmogorov differential equations are as follows (Fig. 4):

Transition diagram of battery
Under steady state, Eq. (16) and (17) reduce to
Now using normalization condition
Substituting (12) into (13), we have
Table 4 includes essential computer performance metrics that have been extracted.
3.4 RAMD indices for inverter S4
This subsystem contains only one unit. If it crashes, the whole system fails. The following are the related integration diagram and Chapman–Kolmogorov differential equations (Fig. 5):

Transition diagram of inverter
Under steady state, Eq. (23) and (24) reduce to
Now using normalization condition
Substituting (12) into (13), we have
Using the following equations
\(\xi = {\text{repair rate}}\), λ = failure rate
System reliability
System availability
System maintainability
System dependability
System availability
System maintainability
System dependability
Reliability of series–parallel system is given by
Sequel to the above definition, Dependability of the system is
See for instance, Saini and Kumar (2019), Saini et al. (2020) and Adhikary et al. (2012)
4 Discussion and conclusion
To obtain the reliability metrics of the different subsystems and method, an empirical analysis for a case was carried out by assigning numerical values to various parameters as shown in Table 1. Tables 2 and 3 show the results for multiple subsystems' stability and repair habits, respectively. The other RAMD steps are summarized in Table 4. According to the numerical review in Table 2, after 80 months of service, the PV system plant's reliability remains 0.44933, although inverter reliability is very poor (0.72615) across all subsystems and demands special attention. As a result, system builders must devise a maintenance strategy for it. Tables 5, 6, 7, 8 demonstrated the improvements in the reliability behavior of various subsystems with respect to time and differing failure rates. From this analysis, it is concluded that subsystem S4, i.e., inverters are most important and highly sensitive components and need particular attention to improve the reliability of the PV system plant.
References
Adhikary DD, Bose GK, Chattopadhyay S, Bose D, Mitra S (2012) RAM investigation of coal-fired thermal power plants: a case study. Int J Ind Eng Comput 3:423–434
Balcioglu H, Soyer K, El-Shimy M (2017) Techno-economic modeling and analysis of renewable energy projects. Economics of variable renewable sources for electric power production. Lambert Academic Publishing/Omniscriptum Gmbh & Company Kg, Saarbrücken, pp 35–61 (ISBN 978-3-330-08361-5)
Baschel S, Koubli E, Roy J, Gottschalg R (2018) Impact of component reliability on large scale photovoltaic systems’ performance. Energies 11:1579 ([CrossRef])
Carazas FJG, Salazar CH, Souza GFM (2011) Availability analysis of heat recovery steam generators used in thermal power plant. Energy 36:3855–3870
Craciunescu D, Fara L, Sterian P, Bobei A, Dragan F (2017) Optimized management for photovoltaic applications based on LEDs by fuzzy logic control and maximum power point tracking. Nearly zero energy communities. Springer Proceedings in Energy. https://doi.org/10.1007/978-3-319-63215-5_23.
Crow LH (2003) Methods for reducing the cost to maintain a fleet of repairable systems. In: IEEE Proceedings of the Annual Reliability and Maintainability Symposium, pp 392–399.
Crow LH (2004) Evaluating the reliability of repairable systems. In: IEEE Proceedings of the Annual Reliability and Maintainability Symposium, pp 73–80
Distefano S, Puliafito A (2009) Reliability and availability analysis of dependent-dynamic systems with RBDs. Reliab Eng Syst Saf 94(9):1381–1393
Goyal D, Kumar A, Saini M, Joshi H (2019) Reliability, maintainability and sensitivity analysis of physical processing unit of sewage treatment plant. SN Appl Sci 1:1507. https://doi.org/10.1007/s42452-019-1544-7
Gupta P, Lal AK, Sharma RK, Singh J (2007) Analysis of reliability and availability of serial processes of plastic-pipe manufacturing plant. Int J Qual Reliab Manag 24(4):404–419
Ishii T, Takashima T, Otani K (2011) Longterm performance degradation of various kinds of photovoltaic modules under moderate climatic conditions. Progress Photovolt Res Appl 19:170
Kececioglu DB (1991) Reliability growth, reliability engineering handbook, 4 edn, vol 2. Prentice-Hall, Englewood Cliffs, pp 415–418
Saini M, Kumar A (2019) Performance analysis of evaporation system in sugar industry using RAMD analysis. J Braz Soc Mech Sci Eng 41:4
Saini M, Kumar A (2020) Stochastic modeling of a single-unit system operating under different environmental conditions subject to inspection and degradation. Proc Natl Acad Sci India Sect A Phys Sci 90:319–326. https://doi.org/10.1007/s40010-018-0558-7
Saini M, Kumar A, Shankar VG (2020) A study of microprocessor systems using RAMD approach. Life Cycle Reliab Saf Eng 9:181–194. https://doi.org/10.1007/s41872-020-00114-3
Sharma V, Kumari M, Kumar S (2011) Reliability improvement of modern aircraft engine through failure modes and effects analysis of rotor support system. Int J Qual Reliab Manag 28(6):675–687
Upadhya KS, Srinivasan NK (2012) Availability estimation using simulation for military systems. Int J Qual Reliab Manag 29(8):937–952
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Maihulla, A.S., Yusuf, I. Reliability, availability, maintainability, and dependability analysis of photovoltaic systems. Life Cycle Reliab Saf Eng 11, 19–26 (2022). https://doi.org/10.1007/s41872-021-00180-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41872-021-00180-1